Пристрій визначення положення промірної вертикалі з судна
Номер патенту: 34681
Опубліковано: 26.08.2008
Автори: Нисторяк Іван Олександрович, Бурачек Всеволод Германович, Мамонтова Людмила Степанівна
Формула / Реферат
Пристрій визначення положення промірної вертикалі з судна при реалізації оберненої геодезичної засічки, який містить цифрову камеру, що встановлена на поворотній платформі з гіростабілізатором, електронні блоки обробки, запису та зберігання інформації, блок керування, берегові орієнтирні знаки, який відрізняється тим, що берегові орієнтирні знаки виконані у вигляді контрастних V-подібних фігур з гострим кутом при вершині, що нанесені на щитах, закріплених на березі, при цьому кутове положення берегових орієнтирів обчислюють по координатах V-подібних зображень візирних цілей на мішені фотоприймача цифрової камери за формулою:
![]() , де
, де
і - номер пікселя в рядку;
![]() - номер пікселя перед лінією переднього фронту фігури;
- номер пікселя перед лінією переднього фронту фігури;
![]() - номер пікселя перед лінією заднього фронту фігури;
- номер пікселя перед лінією заднього фронту фігури;
h - висота зображення в пікселях;
t - номер рядка початку відліку пікселів;
при цьому вводять поправку за нахил фігури від площини, утвореної напрямом стовпців мішені фотоприймача і лінії візування на ціль, яка визначається по асиметрії зміни відліків для переднього і заднього фронтів за напрямом стовпців мішені фотоприймача.
Текст
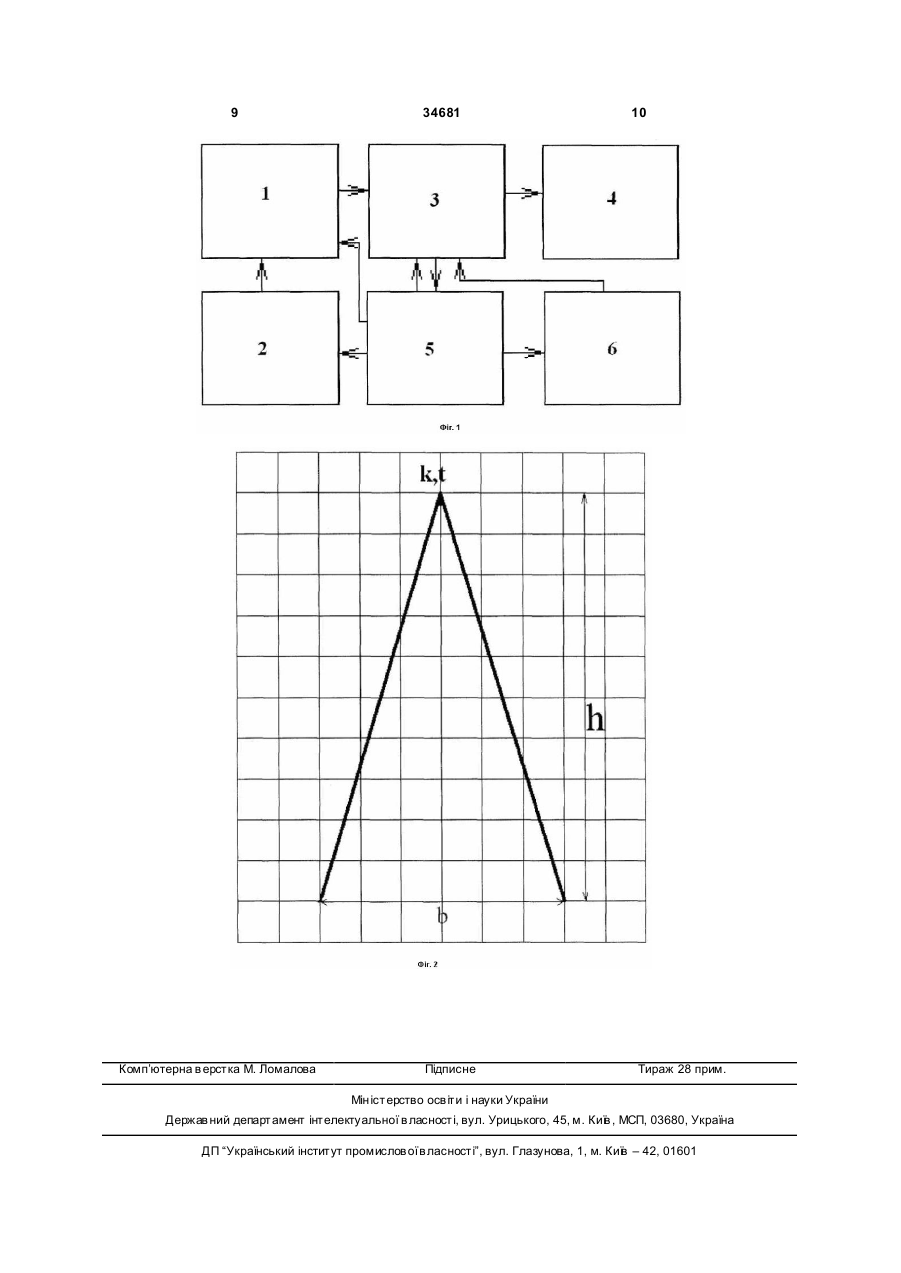
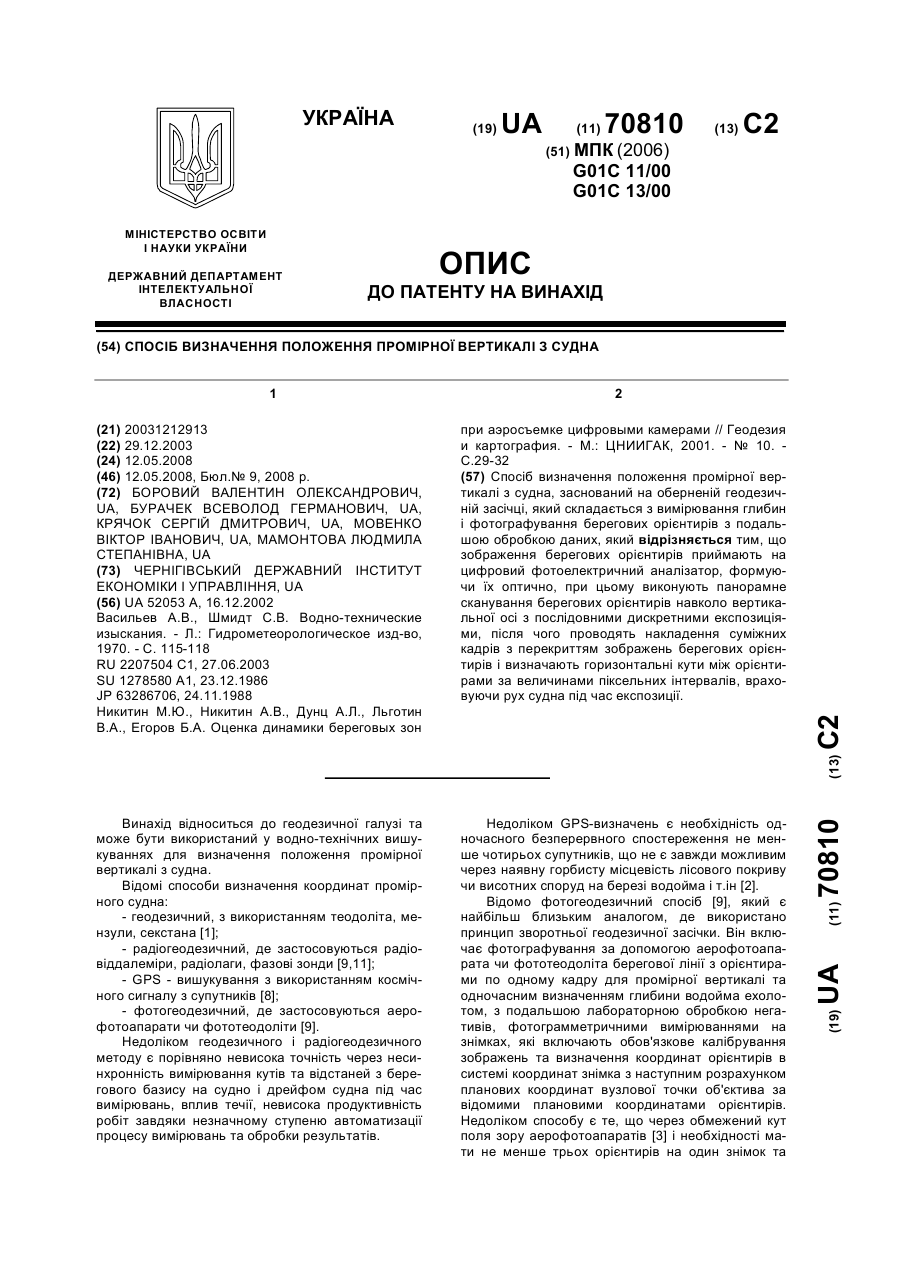
Пристрій визначення положення промірної вертикалі з судна при реалізації оберненої геодезичної засічки, який містить цифрову камеру, що встановлена на поворотній платформі з гіростабілізатором, електронні блоки обробки, запису та зберігання інформації, блок керування, берегові орієнтирні знаки, який відрізняється тим, що берегові орієнтирні знаки виконані у вигляді контрастних V-подібних фі гур з гострим кутом при вершині, що нанесені на щитах, закріплених на березі, при цьому кутове положення берегових орієнтирів обчислюють по координатах V-подібних зобра 3 34681 Цей пристрій є найбільш близьким аналогом по технічній сутності до запропонованого пристрою та обраний за прототип. Недоліком даного пристрою є недостатня точність вимірювання кутови х інтервалів цифровою камерою, при застосуванні існуючих берегових орієнтирних знаків, яка обмежена розміром пікселя ПЗЗ матриці камери та фокусною відстанню її об’єктива. (ПЗЗ - прилади із зарядовим зв’язком). Завданням корисної моделі є створення пристрою, що забезпечує визначення положення візирної осі цифрової камери при наведенні на візирні цілі з підвищеною точністю, що перевищує можливості пікселя. Поставлена задача вирішується за рахунок створення пристрою визначення положення промірної вертикалі з судна при реалізації оберненої геодезичної засічки, який містить цифрову камеру, що встановлена на поворотній платформі з гіростабілізатором, електронні блоки обробки, запису та зберігання інформації, блок управління, берегові орієнтирні знаки, який відрізняється тим, що берегові орієнтирні знаки виконані у вигляді контрастних V-образних фігур з гострим кутом при вершині, що нанесені на щитах закріплених на березі, при цьому кутове положення берегових орієнтирів обчислюють по координатам Vобразних зображень візирних цілей на мішені фотоприймача цифрової камери за формулою: 1 t +h A= å (aiP + aiЗ - 1) , де 2h t і - номер пікселя в рядку; aiP - номер пікселя перед лінією переднього фронту фігури; aiЗ - номер пікселя перед лінією заднього фронту фігури; h - висота зображення в пікселях; t - номер рядка початку відліку пікселей; при цьому вводять поправку за нахил фігури від площини, утвореною напрямом стовпців мішені фотоприймача і лінії візування на ціль, яка визначається по асиметрії зміни відліків для переднього і заднього фронтів за напрямом стовпців мішені фотоприймача. Технічним результатом є підвищення точності візування цифровою камерою, що допомагає підвищити загальну точність кутови х вимірювань. На Фіг.1 зображена схема запропонованого пристрою: 1. цифрова камера; 4 2. гіростабілізуюча платформа з механізмом обертання камери; 3. блок обробки інформації; 4. блок запису та зберігання інформації; 5. блок управління; 6. ехолот. Усі вищезазначені пристрої і блоки встановлені на борту судна. В роботі пристрою може бути застосована навігаційна система судна (на схемі не показана). На Фіг.2 схематично показано розміщення зображення V-образної візирної цілі на вимірювальній мішені, наприклад, на ПЗЗ-матриці, що є проекцією фігури візирної цілі берегового орієнтирного знаку. Домовимося рахування пікселів виконувати зліва направо (i=l,...k,...n) та зверху вниз (j=l,...t,...m), при цьому: k, t - координати вершини V-образної фігури; h - висота фігури; b - основа (базис) фігури; 1 k - b, t + h - координати точок лівого кінця ба2 зиса; 1 k + b, t + h - координати точок правого кінця 2 базиса; 1 Лінія, що сполучає точки (k,t) і ( k - b, t + h ), є 2 1 переднім фронтом (ПФ) фігури а ( k + b, t + h ) 2 заднім фронтом (ЗФ). Лінія фронту - це контрастна лінія переходу межі фігури (наприклад, на чорному фоні світлий колір фігури). Розпізнавання фігури можна проводити по куту між лініями ПФ і ЗФ, а також по відношенню розмірів h і b. Крім того, поряд з фігурою можна розмістити код візирної мети. Нахил лінії ПФ (ЗФ) буде рівний a b a æ b ö tg = + - ПФ tg = ç (1) ÷ - ЗФ 2 2h 2 è 2h ø Розглянемо варіант чутливості матриці, при якому пікселі ініціюють електричний сигнал у разі засвічування не менше 0,5 площі пікселя. Необb хідно врахува ти відношення = 0,3 і округлення 2h номера пікселя за заданої умови. Якщо вертикальна лінія К на Фіг.2 ділить фігуру навпіл, то: Таблиця 1 № Pj t 0 1b 2 p 4h 3b 2 p 4h Dп Відлік Рі відносно К t+1 t+2 1b 2 p 2h Для h=10 b=6 відносно Округлюючи значення К відносно К 0 0 -0,15p2 0 -0,45p2 -1 5 34681 6 Продовження таблиці 1 5b 2 p 4h 7b 2 p 4h 9b 2 p 4h 11 b 2 p 4 h 13 b 2 p 4 h t+3 t+4 t+5 t+6 t+7 t+l ( 2l - 1) b 2 p 4 h t+h (2h - 1) b 2 p 4 h Dn - приріст сигналу від рядка до наступного рядка. Вправо від лінії К будуть ті ж значення, але із знаком (+). При цьому середнє значення по кожному рядку буде рівним 0, тобто знаходиться на лінії К. Очевидно, що при n=100 втрата одного імпульсу (сигналу від одного пікселя) дає похибку p sp = = ± 0,05 p 20 Розглянемо зміщення зображення візирної цілі на величину Dх: -0,75p2 -1 -1,05p2 -1 -1,35p2 -2 -1,65p2 -2 -1,95p2 -2 t+8®-2,25p2 t+9®-2,55p2 t+10® -2,83p2 -3 -3 - всі значення сигналів по рядкам на лінії ПФ зміняться на величину -Dхр2 (нехтуючи похибкою ( 2l - 1) b 2 другого і вищого порядку), тобто на p 4 h 2 - всі значення ЗФ збільшуються на Dхр , тобто ( 2l - 1) b 2 на + p 4 h Тоді отримаємо: Таблиця 2 при Dх=0,1р NN рядків t t+1 t+2 t+3 t+4 t+5 t+6 t+7 t+8 t+9 t+10 Зміна сигналів на ПФ лінії +0,1р2 -0,05р2 -0,35р2 -0,65р2 -0,95р2 -1,25р2 -1,55р2 -1,85р2 -2,15р2 -2,45р2 -2,75р2 0 0 0 -1 -1 -1 -2 -2 -2 -2 -3 при Dх=0,2р Сер. Зміна сигналів на Ср. знач. Зміна сигналів на Зміна сигналів на знач. (ПФ+ЗФ)/ ЗФ лінії ПФ лінії ЗФ лінії (ПФ+ЗФ)/ 2 2 +0,1р2 0 0 +0,2р2 0 +0,2р2 0 0 +0,25р2 0 0 +0,05р2 0 +0,35р2 0 0 +0,55р2 1 +0,5 -0,25р2 0 +0,65р2 1 +0,5 +0,85р2 1 0 -0,55р2 -1 +0,95р2 1 0 2 2 +1,15р 1 0 -0,85р -1 +1,25р2 1 0 +1,45р2 1 0 -1,15р2 -1 +1,55р2 2 +0,5 +1,75р2 2 0 -1,45р2 -1 +1,85р2 2 +0,5 2 2 +2,05р 2 0 -1,75р -2 +2,15р2 2 0 +2,35р2 2 0 -2,05р2 -2 +2,45р2 2 0 +2,65р2 3 +0,5 -2,35р2 -2 +2,75р2 3 +0,5 +2,95р2 3 0 -2,65р2 -3 +3,05р2 3 0 Ср. +0,1 Ср. +0,2 Таким чином, можна реально одержати високу чутливість матриці (не гірше ±0,05р) і точність візування, як мінімум, на порядок вище за точність, відповідну єдиному пікселю для випадку традиційного візування. При дослідженні впливу нахилу зображення візирної цілі відносно осі координат матриці мішені, звернемо увагу, що при паралельності бісект риси зображення візирної цілі і осі однієї з координат матриці (наприклад осі X) відліки по мішені симетричні, а при нахилі зображення має місце асиметрія, величина якої залежить від кута нахилу 2h 2 (буде мати місце зміна величини D = ± p ). Цю 4h залежність використовують для обчислення по 7 34681 правки за нахил зображення і вводять її в результат віз ування. Робота запропонованого пристрою на промірній вертикалі виконується наступним чином: під час руху судна у промірному створі з блоку управління подається команда в блок 2 на механізм обертання камери 1, ехолот 6 та цифрову камеру 1. Одночасно проводиться вимірювання глибини водного об’єкту та електронне сканування берегових орієнтирів. Момент виміру визначається по інформації від навігаційної системи судна, яка потрапляє в блок 3. В пам’яті блоку 3 закладена програма проміру, що передається в блок 5. Отримана інформація подається в блок 3, звідки вона за командою блоку управління 5 передається для наступного запису в блок 4 (гіроплатформа підтримується в робочому стані з моменту ви ходу на перший промірний створ і до кінця вимірювань з останньої промірної вертикалі). В блоці 4 інформація накопичується і використовується для комп’ютерної обробки даних проміру. Наступна обробка включає накопичення в пам’яті комп’ютера даних про всі промірні вертикалі, визначення координат орієнтирів на зображеннях в системі координат кожного знімка, введення поправок за калібрування цифрової камери, зрощення окремих кадрів для даної промірної вертикалі за зображеннями орієнтирів та розрахунку планових координат промірної вертикалі за методиками, наведеними в [1] на ст. 118-120, або в [6] на ст. 78 та в [7] на ст. 272-273. При візуванні цифровою камерою 1 на візирну ціль в площині зображень камери на мішені фотоприймача отримають спроектоване зображення Vобразної візирної цілі та її код. Дані вимірювань (відліки по рядках матриці в точках перетинання рядками ліній переднього і заднього фронтів зображення фігури візирної цілі) потрапляють в блок 3. В блоці 3 виконується обробка інформації, що отримується в процесі вимірювань і обчислюються координати промірних вертикалей. Отриманий результат передають в блок 6 для запису і зберігання інформації. Слід відмітити, що в блоці 3 виконується додавання відліків по передньому і задньому фронтам зображення візирної цілі, і знаходження середнього по кожному рядку. Після цього виконується додавання середніх відліків по рядках і розподіл отриманої суми на кількість рядків, по яким були отримані відліки ліній переднього і заднього фронтів зображення візирної цілі. При цьому обчислюють координату вершини фігури зображення цілі за формулою: 1 t +h A= å (aiP + aiЗ - 1) , де 2h t і - номер пікселя в рядку; 8 aiP - номер пікселя перед лінією переднього фронту фігури; aiЗ - номер пікселя перед лінією заднього фронту фігури; h - висота зображення в пікселях; t - номер рядка початку відліку пікселей; та вводять поправку за нахил фігури від площини, утвореною напрямом стовпців мішені фотоприймача і лінії візування на ціль, яка визначається по асиметрії зміни відліків для переднього і заднього фронтів за напрямом стовпців мішені фотоприймача. По обчислених кутах для кожної пари берегових орієнтирних знаків методом оберненої геодезичної засічки обчислюють координати промірних вертикалей. Таким чином, запропонований пристрій визначення положення промірної вертикалі з судна з використанням візування цифровою камерою на V-образні візирні цілі берегових орієнтирних знаків, дозволяє суттєво підвищити точність візування, за рахунок використання масиву відліків по пікселям і обчислення часток піксельних інтервалів та забезпечує значне підвищення продуктивності робіт та точності визначення координат порівняно з відомими способами. Література 1. Ворковастов К.С, Агеев М.Ф., Маркшейдерские экваториальные работы. –М.: Недра, 1986. 2. Сердюков В.М. Фотограмметрия в промышленном и гражданском строительстве. - М.: Недра, 1977г., 245с. 3. Неумывакин Ю.К. Смирнов А.И. Практикум по геодезии Учебн. пособие для вузов. – М.: Недра 1985г. - 200с. 4. Мозжухин С.В. Гидрографические работы в инженерних изысканиях. - М.: Недра 1971г. - 96с. 5. Суховірський Б.І., Боровий В.О., Качуренко Ю.А. Створення кадастрових карт з використанням технологій GPS та дистанційного зондування. - 36 Інженерна геодезія. - Вип. 46. - 2002р. с.36-49. 6. Сидоренко Ю. Цифровое фото для высших разрешений ГИС - обозрение (осень - зима 1996г.), С.16-17. 7. Никитин М.Ю., Никитин А.В., и др. Оценка динамики береговых зон при аэрофотосъемке цифровыми камерами. Геодезия и картография М.: ЦНИИГАИК, 2001г., №10 с.29-33. 8. Глобальна система визначення місцеположення (GPS). Теорія і практика. Б. ГофманнВелленгоф, Г. Ліхтенггер, Д. Коллінз; пер. з англ. третього вид. під ред. Я.С. Яцківа - Київ: Наук, думка. 1995. - 380с. 9. Боровий В.О., Бурачек В.Г. та ін. Деклараційний патент на винахід №70810 від 15.10.2004р. «Спосіб визначення положення промірної вертикалі з судна». 9 Комп’ютерна в ерстка М. Ломалова 34681 Підписне 10 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for determination of position of measuring vertical from vessel
Автори англійськоюBurachek Vsevolod Hermanovych, Mamontova Liudmyla Stepanivna, Nystoriak Ivan Oleksandrovych
Назва патенту російськоюУстройство для определения положения промерной вертикали с судна
Автори російськоюБурачек Всеволод Германович, Мамонтова Людмила Степановна, Нисторяк Иван Александрович
МПК / Мітки
МПК: G01C 11/00
Мітки: положення, пристрій, промірної, судна, визначення, вертикалі
Код посилання
<a href="https://ua.patents.su/5-34681-pristrijj-viznachennya-polozhennya-promirno-vertikali-z-sudna.html" target="_blank" rel="follow" title="База патентів України">Пристрій визначення положення промірної вертикалі з судна</a>
Спосіб визначення положення промірної вертикалі з судна
Номер патенту: 70810
Опубліковано: 12.05.2008
Автори: Мамонтова Людмила Степанівна, Боровий Валентин Олександрович, Мовенко Віктор Іванович, Крячок Сергій Дмитрович, Бурачек Всеволод Германович
МПК: G01C 11/00, G01C 13/00
Мітки: положення, промірної, спосіб, судна, вертикалі, визначення
Формула / Реферат:
Спосіб визначення положення промірної вертикалі з судна, заснований на оберненій геодезичній засічці, який складається з вимірювання глибин і фотографування берегових орієнтирів з подальшою обробкою даних, який відрізняється тим, що зображення берегових орієнтирів приймають на цифровий фотоелектричний аналізатор, формуючи їх оптично, при цьому виконують панорамне сканування берегових орієнтирів навколо вертикальної осі з послідовними...
Оптико-електронний пристрій визначення вертикалі
Номер патенту: 73328
Опубліковано: 15.07.2005
Автори: Бурачек Всеволод Германович, Суковенко Оксана Володимирівна, Крячок Сергій Дмитрович, Боровой Валентин Олександрович, Крельштейн Петро Давидович
МПК: G01C 9/00
Мітки: пристрій, вертикалі, визначення, оптико-електронний
Формула / Реферат:
Оптико-електронний пристрій визначення вертикалі, який має рідинний бульбашковий рівень, оптико-електронний аналізатор з об'єктивом і ПЗС-матрицею, корпус, блок підсвічування, електронний блок обробки інформації та керування, який відрізняється тим, що верхня частина рівня обмежена двовгнутою лінзою, при цьому величина радіуса нижньої сфери лінзи залежить від заданої точності і діапазону вимірювань пристрою, а радіус верхньої сфери лінзи...
Пристрій визначення вертикалі на рухливому об`єкті
Номер патенту: 10397
Опубліковано: 15.11.2005
Автори: Шульц Роман Володимирович, Надточій Олександр Володимирович, Крельштейн Петро Давидович, Якунін Олександр Володимирович, Бурачек Всеволод Германович
МПК: G02B 13/08
Мітки: вертикалі, рухливому, визначення, пристрій, об'єкти
Формула / Реферат:
Пристрій визначення вертикалі на рухливому об'єкті, що містить рідинний рівень з повітряною бульбашкою, гіроскопічний блок та блок управління, який відрізняється тим, що в ньому рідинний рівень з повітряною бульбашкою та гіроскопічний блок закріплені в єдиному корпусі, при цьому пристрій містить оптико-електронний блок вимірювання положення бульбашки рівня, датчик вимірювання положення осі гіроскопа, блок обробки інформації; при цьому виходи...
Спосіб візування цифровою камерою

Номер патенту: 32103
Опубліковано: 12.05.2008
Автори: Мамонтова Людмила Степанівна, Нисторяк Іван Олександрович, Бурачек Всеволод Германович
МПК: G01C 11/00
Мітки: спосіб, візування, камерою, цифровою
Формула / Реферат:
Спосіб візування цифровою камерою, що оснований на визначенні координати V-подібного зображення візирної цілі у полі зору цифрової камери, який відрізняється тим, що при вимірюванні місцеположення зображення візирної цілі на мішені матричного фотоприймача цифрової камери підсумовують відліки по рядках мішені фотоприймача в зонах, як мінімум, переднього і заднього фронтів зображення фігури цілі, а рядки мішені орієнтують за напрямом...
Спосіб визначення вертикалі на рухомому об’єкті
Номер патенту: 75913
Опубліковано: 15.06.2006
Автори: Бурачек Всеволод Германович, Крельштейн Петро Давидович, Шульц Роман Вікторович, Суковенко Оксана Володимирівна
МПК: G01C 19/00
Мітки: вертикалі, рухомому, визначення, об'єкти, спосіб
Формула / Реферат:
1. Спосіб визначення вертикалі на рухомому об'єкті, заснований на властивості рідинного рівня з повітряною бульбашкою індексувати горизонтальне положення основи рівня та властивості гіроскопічного датчика зберігати незмінним положення осі гіроскопа у просторі, який відрізняється тим, що під час руху об'єкта вимірюють зміну положення бульбашки рідинного рівня оптико-електронним способом, одночасно вимірюють зміну положення корпусу...
Попередній патент: Функціональний топінг (солодкий соус) для харчування спортсменів “ранкове пробудження”
Наступний патент: Спосіб профілактики пташиного грипу, гельмінтозу та інших захворювань домашньої птиці
Випадковий патент: Спосіб вирощування сої на зрошуваних землях півдня україни