Спосіб визначення кутових координат цілі і пристрій для його реалізації
Номер патенту: 74230
Опубліковано: 15.11.2005
Автори: Попов Віктор Гаврилович, Черняк Сергій Іванович, Бузанов Віктор Іванович
Формула / Реферат
1. Спосіб визначення кутових координат цілі за допомогою нашоломної системи цілеуказання з нерухомою міткою у візирному пристрої, який включає фіксацію положення візирної лінії шляхом суміщення нерухомої мітки з ціллю та визначення кутових координат візирної лінії, що відповідають кутовим координатам цілі, який відрізняється тим, що за допомогою додаткової рухомої мітки фіксують кут непогодження між положенням візирної лінії, що визначається нашоломною системою цілеуказання, та положенням цілі, яке визначається бортовою системою виявлення й супроводження цілі, та якому відповідає положення рухомої мітки, поворотом голови оператора (льотчика) змінюють положення нашоломного візирного пристрою, суміщають нерухому та рухому мітки, а потім визначають кутові координати візирної лінії, утримуючи суміщеними нерухому і рухому мітки.
2. Пристрій визначення кутових координат цілі, який містить нашоломну систему цілеуказання, що включає нашоломний візирний пристрій з нерухомою міткою, яка фіксує положення візирної лінії, світловипромінювачі, розміщені на борту літака оптико-локаційні блоки і обчислювач, який відрізняється тим, що нашоломний візирний пристрій виконаний з можливістю формування в ньому принаймні однієї додаткової рухомої мітки, а обчислювач обладнаний засобами електричного зв'язку з бортовою системою виявлення і супроводження цілі.
Текст
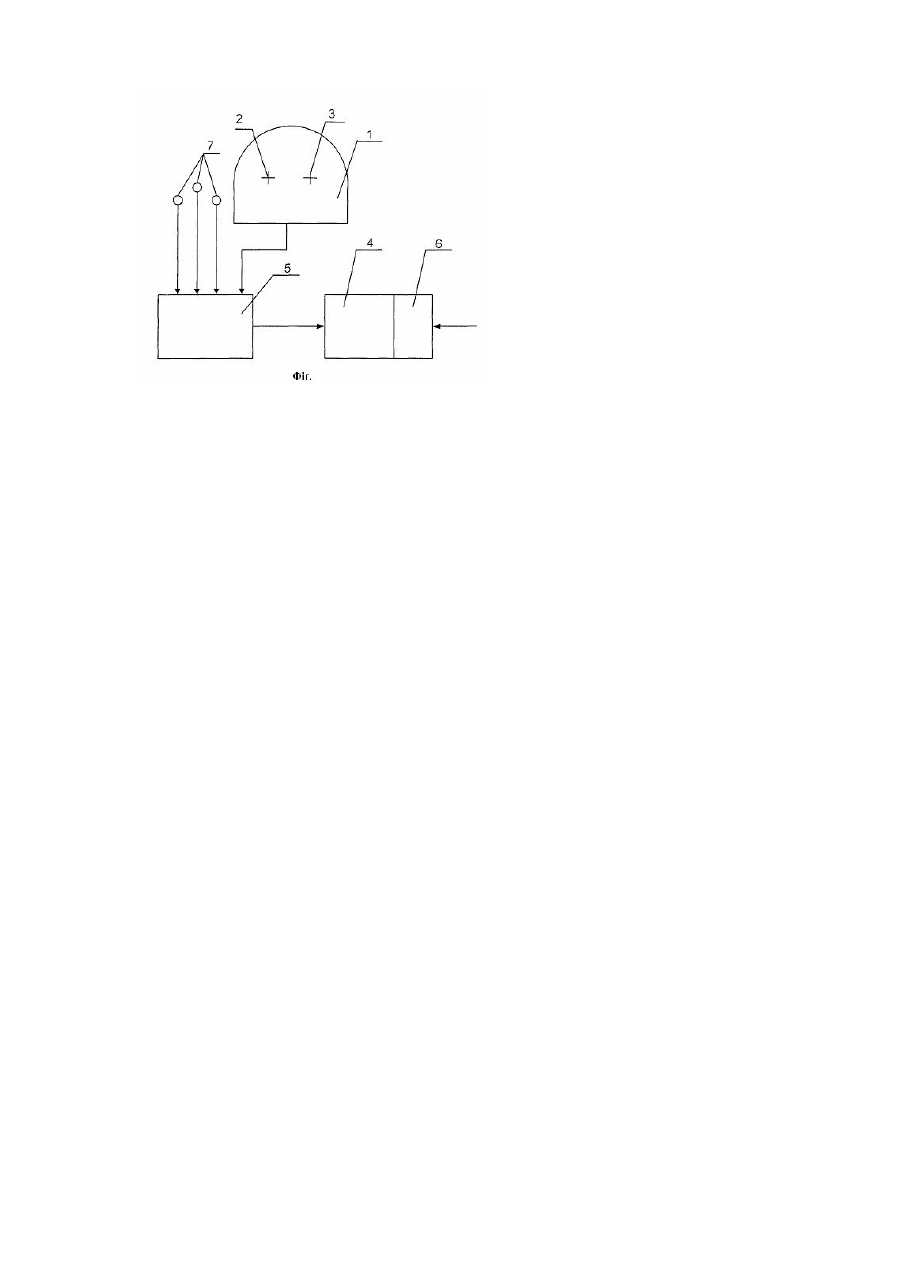
Винахід відноситься до галузі побудови систем цілеуказання, зокрема до способів і пристроїв по визначенню кутових координат цілі за допомогою нашоломної системи цілеуказання в умовах відсутності візуальної видимості цілі і може застосуватись в авіації, космонавтиці, тренажеробудуванні та інших галузях те хніки. Відомі способи визначення кутови х координат цілі за допомогою нашоломної системи цілеуказання, наприклад, патенти: США №3375375, Великобританії №1520154, Франції №2657154. Загалом всі ці рішення засновані на способі визначення кутових координат цілі, суть якого полягає в наявності нерухомої мітки нашоломного візирного пристрою, що визначає положення візирної лінії. На шоломі установлюють також датчики, що фіксують її положення, а на борту літального апарата розміщують приймачі випромінювання. Пеленгують положення датчиків і за допомогою обчислювального пристрою визначають кутові координати візирної лінії. Поворотом голови суміщають візирну лінію з ціллю, при цьому кутові координати візирної лінії відповідають кутовим координатам цілі. Недоліком такого способу є неможливість визначення кутових координат в умовах відсутності візуальної видимості цілі. Відомі пристрої визначення кутови х координат цілі за допомогою нашоломної системи цілеуказання, наприклад, патенти: США №3375375, Великобританії №1529154, Франції №2657154. Ці пристрої містять в собі формувач візирної лінії, світловипромінювачі (датчики інфрачервоного випромінювання), розташовані на шоломі спостерігача (оператора), які фіксують положення візирної лінії, оптико-локаційні блоки (приймачі інфрачервоного випромінювання), що пеленгують положення світловипромінювачів, і обчислювальний пристрій. У всіх відомих пристроях бортові оптико-локаційні блоки та обчислювальні пристрої жорстко закріплені на борту літака, а візир, з орієнтованими відносно його осі світловипромінювачами, установлено на шоломі, який переміщується в процесі роботи відносно оптико-локаційних блоків. Створення пристрою такого типу засновано на способі дистанційного слідкування за поворотом шолома оператора (льотчика), а визначення кутів візування полягає у визначенні кутів просторової орієнтації осі візира під час накладання візирного перехрестя (мітки) на ціль. Кути просторової орієнтації визначають за відомою базовою відстанню між оптико-локаційними блоками, пеленгами на світловипромінювачі, виміряними оптико-локаційними блоками, та параметрами розміщення світловипромінювачів відносно осі візира. Обчислені кутові координати надходять в канали подальшої обробки літака. Докладно конструкцію відомих пристроїв та принцип їх дії викладено, наприклад, в книзі "Нашлемные устройства индикации и прицеливания", ВАРКТ, 1975 г., №3, стор. 24-30. Основним недоліком цих пристроїв також є неможливість визначення кутових координат цілі в умовах відсутності її візуальної видимості. Відомий спосіб визначення кутових координат цілі в умовах відсутності візуальної видимості та пристрій для його реалізації [деклараційний патент України №35913А від 31.03.1999 р., F41G3/22, бюлетень "Промислова власність" №3 за 2001 р.]. Він заснований на використанні інфрачервоного випромінювання, завдяки якому невидима ціль візуалізується у видиму. Недоліком цього способу є те, що він припускає наявність на шоломі спостерігача досить складних і громіздких пристроїв, а в умовах візуальної видимості - необхідність установки візирного пристрою із складу відомої нашоломної системи цілеуказання. Пристрій, який реалізує даний спосіб, містить інфрачервоні елементи на шоломі спостерігача, що створює значні навантаження на його голову. Конструкція пристрою складна і громіздка. Найбільш близьким за технічною суттю є спосіб визначення кутових координат цілі, який реалізується у системі "СУРА", розробленій КП "ЦКБ "Арсенал" (свідчення про державну реєстрацію виключної правомірності КП "ЦКБ "Арсенал", "Техническая документация на изделие "СУРА", (ВП №780). Цей спосіб припускає наявність у нашоломному візирному пристрої нерухомої мітки, що фіксує положення візирної лінії шляхом суміщення мітки з ціллю. Однак даним способом неможливо здійснити визначення кутових координат цілі в умовах відсутності її віз уальної видимості. Пристрій, що реалізує даний спосіб і узятий за прототип (система "СУРА", розроблена КП "ЦКБ "Арсенал"), містить нашоломну систему цілеуказання, що включає нашоломний візирний пристрій з нерухомою міткою, яка фіксує положення візирної лінії, оптико-локаційні блоки, світловипромінювачі і обчислювальний пристрій. Недоліком цього пристрою є також неможливість визначення кутових координат цілі в умовах відсутності її візуальної видимості. Перед авторами стояла задача створення способу визначення кутови х координат цілі в умовах відсутності її візуальної видимості. Для вирішення поставленої задачі у відомому способі визначення кутових координат цілі за допомогою нашоломної системи цілеуказання з нерухомою міткою у візирному пристрої, який включає фіксацію положення візирної лінії шляхом суміщення нерухомої мітки з ціллю та визначення кутових координат візирної лінії, що відповідають кутовим координатам цілі. За допомогою додаткової рухомої мітки фіксують кут непогодження між положенням візирної лінії, що визначається нашоломною системою цілеуказання та положенням цілі, яке визначається бортовою системою виявлення і супроводження цілі, та якому відповідає положення рухомої мітки, поворотом голови оператора змінюють положення нашоломного візирного пристрою, суміщають нерухому та рухому мітки, а потім визначають кутові координати візирної лінії при суміщених нерухомій та рухомій мітках. Перед авторами стояла задача створення нашоломного візирного пристрою, який би дозволяв визначати кутові координати цілі в умовах відсутності її віз уальної видимості і при цьому не потребує додаткових елементів та зберігає високу точність цілеуказання. Поставлена мета досягається за рахунок того, що в пристрої для визначення кутових координат цілі, до складу якого входить нашоломна система цілеуказання, яка включає нашоломний візирний пристрій з нерухомою міткою, що фіксує положення візирної лінії, світловипромінювачі, розміщені на борту, оптиколокаційні блоки і обчислювальний пристрій, нашоломний візирний пристрій, який виконано з можливістю формування в ньому, принаймні, однієї додаткової рухомої мітки, а обчислювальний пристрій обладнано засобами електричного зв'язку з бортовою системою виявлення і супроводження цілі. Спосіб реалізується пристроєм, блок-схема якого представлена на кресленні (див. Фіг.), де: 1 - нашоломний візирний пристрій; 2 - нерухома мітка; 3 - рухома мітка; 4 - обчислювач цілеуказання; 5 - оптико-локаційний блок; 6 - засіб електричного зв'язку з бортовою системою виявлення і супроводження цілі; 7 - світловипромінювачі. Нашоломна система цілеуказання, яка реалізує спосіб визначення кутових координат цілі, що заявляється, складається з нашоломного візирного пристрою 1, до складу якого входять нерухома мітка 2, яка виконана у вигляді перехрестя, та рухома мітка 3, що виконана у вигляді світлового зображення перехрестя. На борту літака, наприклад, установлені обчислювач 4 та оптико-локаційні блоки 5, а світловипромінювачі 7 установлені на лобовій частині шолома льотчика. Крім того, обчислювач 4 через засіб електричного зв'язку 6 з'єднано з бортовою системою виявлення і супроводження цілі. Нашоломний візирний пристрій 1 являє собою оптичний формувач, що забезпечує формування та проеціювання в око оператора зображень мітки (сітки). За основу створення нашоломного візирного пристрою 1 узято оптичну схему з лінзовим об'єктивом. Напівпрозоре дзеркало розміщують перед оком оператора. У фокальній площині об'єктива розміщується мітка. Світловипромінювачі 7 можуть бути жорстко зв'язані між собою, знаходяться на заданій відстані один від одного і розташовані на одній з бокових поверхонь шолома льотчика паралельно до візирної лінії, при цьому, оптико-локаційні блоки 5 будуть також жорстко зв'язані між собою, знаходяться на заданій відстані один від одного і розташовані таким чином, що можуть сканувати бокову поверхню шолома з розташованими на ній, наприклад, двома світловипромінювачами (див. Заявку UA, №2000095169 від 5.09.2000р.]. Нашоломна система цілеуказання працює таким чином. Кожний із світловипромінювачів 7, розташованих на шоломі, формує інфрачервоне світлове поле. Нашоломний візирний пристрій з нерухомою міткою фіксує положення візирної лінії. Світлові поля скануються оптико-локаційними блоками 5, що пеленгують положення центрів випромінювання світловипромінювачів 7 та передають цю інформацію на обчислювач 4, де визначаються кутові координати візирної лінії. Під час стеження за ціллю льотчик поворотом голови з шоломом суміщає візирну лінію з ціллю, при цьому нашоломна система цілеуказання безперервно визначає кутові координати лінії візування, а отже і цілі, відносно літака. Якщо світловипромінювачі 7 та оптико-локаційні блоки 5 розміщені односторонньо відносно шолома (льотчика), то обчислювач з урахуванням постійно заданих відстаней між світловипромінювачем 7 і оптикоелектронними блоками 5 визначає кутові координати лінії, що проходить через світловипромінювачі 7. Оскільки ця лінія паралельна до візирної лінії то їх кутові координати тотожні. При відсутності візуальної видимості під час спостереження за ціллю в нашоломному візирному пристрої 1 висвічується зображення другої додаткової рухомої мітки 3. Використовуючи додаткову р ухому мітку З фіксують кут непогодження між положенням візирної лінії, що визначається нашоломною системою цілеуказання, та положенням цілі, яке визначається бортовою системою виявлення та супроводження цілі, та якому відповідає положення рухомої мітки. Льотчик поворотом голови з шоломом суміщає дві мітки нерухому 2 і рухому 3, при цьому кутові координати нерухомої мітки 2 дорівнюють кутовим координатам цілі. У випадку, коли рухома мітка З виходить за межі поля зору нашоломного візирного пристрою 1, то вона починає миготіти, що вказує на ви хід її із зони роботи. Зображення додаткової рухомої мітки 3 у візирному пристрої 1 формує бортова система виявлення та супроводження цілі. Положення додаткової рухомої мітки 3 зв'язано з кутовими координатами цілі і визначається вказаною бортовою системою. Бортова система виявлення та супроводження цілі за допомогою засобів електричного зв'язку 6 зв'язана з обчислювачем цілеуказання 4, що дозволяє з урахуванням масштабування й узгодження систем координат визначити кутові координати цілі. За умови візуальної видимості цілі та втримування суміщеними нерухому мітку 2 та р ухому мітку 3 нашоломний візирний пристрій 1 працює як прототип. Як нашоломний візирний пристрій 1 може бути застосовано індикатор на базі PLANAR (США). Крім того, як формувач візирної лінії та оптико-локаційних блоків 5 можуть бути використані, наприклад, пристрої, виконані на базі тих, що описані в книзі Лазарева Л. П. "Инфракрасные и световые приборы самонаведения и наведения летательных аппаратов", стор. 247-253 і стор. 401-410, М., СССР, "Ма шиностроение",1989 г. Як світловипромінювачі 7 може бути використаний пристрій, виконаний на базі світлодіода типу ЗЛІ23А, "Каталог полупроводниковых приборов", стор. 144, М., СССР, Центральное конструкторское бюро, 1990 г. Як обчислювальний пристрій 4 може бути використаний електронний блок, виконаний на базі мікропроцесора МС 80 С 186-Х1-20. Як засоби електричного зв'язку 6 з бортовою системою виявлення та супроводження цілі використовуються стандартизовані з'єднувачі та, при необхідності, елементи масштабування й узгодження систем координат.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of the angular coordinates of the target and device for its implementation
Автори англійськоюBuzanov Viktor Ivanovych, Cherniak Serhii Ivanovych, Popov Viktor Havrylovych
Назва патенту російськоюСпособ определения угловых координат цели и устройство для его реализации
Автори російськоюБузанов Виктор Иванович, Черняк Сергей Иванович, Попов Виктор Гаврилович
МПК / Мітки
МПК: F41G 3/22
Мітки: реалізації, пристрій, визначення, цілі, кутових, координат, спосіб
Код посилання
<a href="https://ua.patents.su/3-74230-sposib-viznachennya-kutovikh-koordinat-cili-i-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення кутових координат цілі і пристрій для його реалізації</a>
Спосіб визначення кутових координат джерела оптичного випромінювання та позиційно-чутлива матриця фоточутливих елементів
Номер патенту: 51047
Опубліковано: 15.11.2002
Автори: Потапова Галина Костянтинівна, Москаленко Михайло Андрійович
МПК: H01L 31/042, H01L 31/05
Мітки: матриця, кутових, елементів, випромінювання, позиційно-чутлива, спосіб, фоточутлівих, визначення, джерела, координат, оптичного
Формула / Реферат:
1. Спосіб визначення кутових координат джерела оптичного випромінювання, який полягає у тому, що за допомогою оптичної системи випромінювання джерела фокусують на позиційно-чутливу матрицю у світлову пляму, перетворюють оптичні сигнали на елементах матриці в електричні сигнали, формують електричні сигнали, рівні сумам електричних сигналів з елементів матриці, порівнюють ці сигнали з порогом виявлення, за результатами порівняння приймають...
Спосіб вимірювання кутових координат цілі
Номер патенту: 13420
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Родін Олександр Валерійович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: кутових, вимірювання, спосіб, координат, цілі
Формула / Реферат:
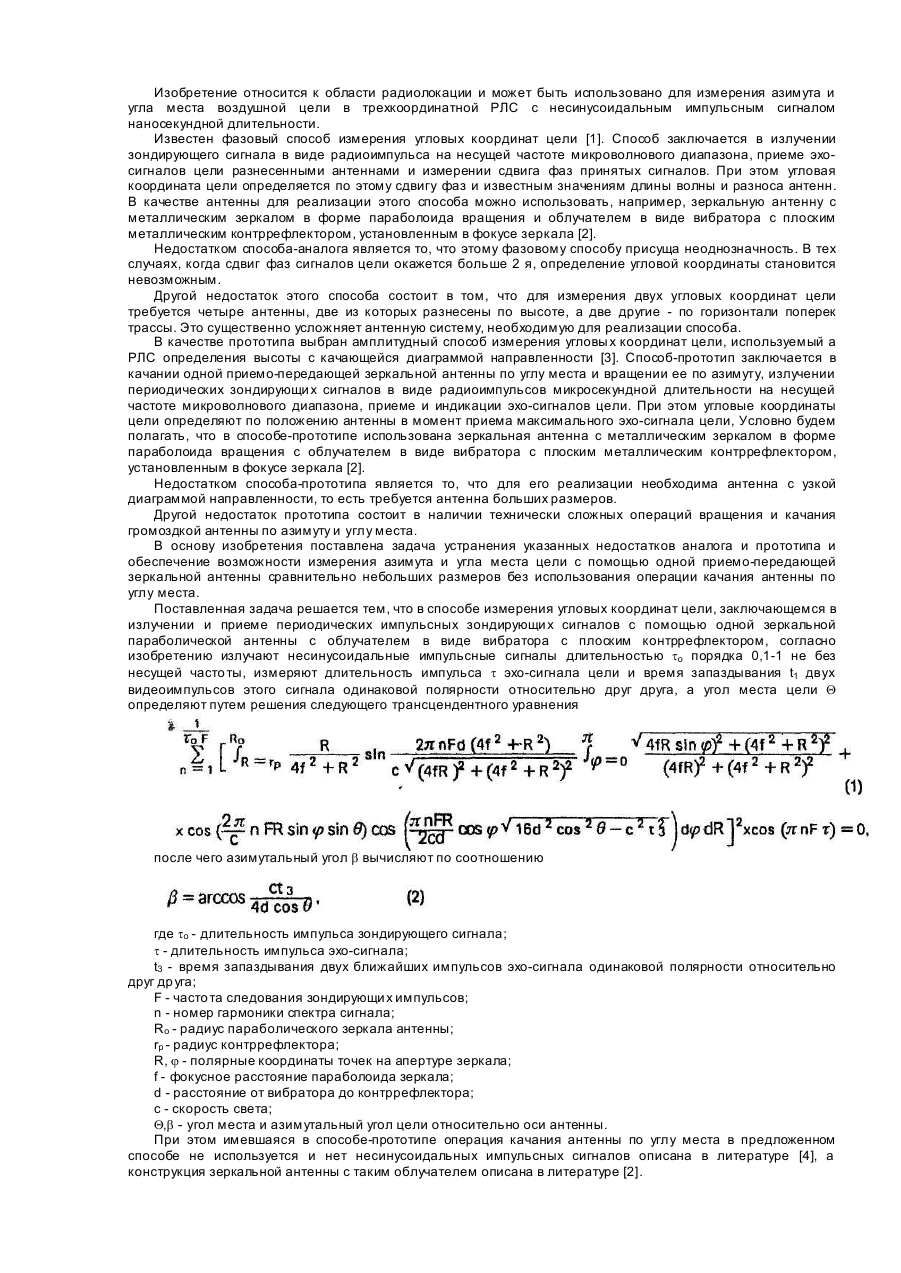
Способ измерения угловых координат цели, заключающийся в излучении и приеме периодических импульсных зондирующих сигналов с помощью одной зеркальной параболической антенны с облучателем в виде вибратора с плоским контррефлектором, отличающийся тем, что излучают несинусоидальные импульсные сигналы длительностью t0 порядка 0,1-1 нс без несущей частоты, измеряют длительность импульса t эхо-сигнала цели и время запаздывания t3 двух...
Спосіб вимірювання кутових координат цілі для наземного секвентного радіолокатора
Номер патенту: 13419
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: цілі, вимірювання, радіолокатора, спосіб, координат, секвентного, кутових, наземного
Формула / Реферат:
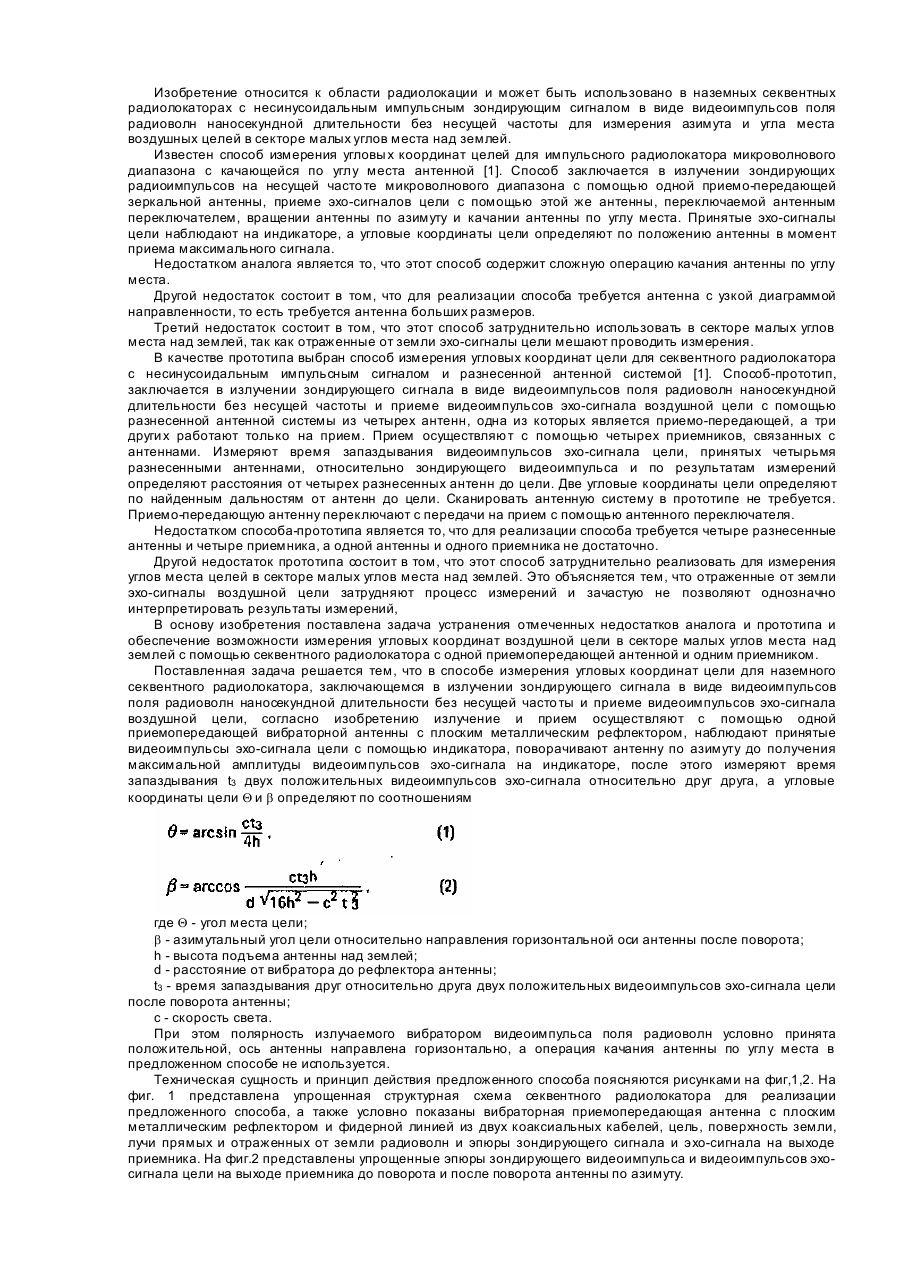
Способ измерения угловых координат цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты и приеме видеоимпульсов эхо-сигнала воздушной цели, отличающийся тем, что излучение и прием осуществляют с помощью одной приемо-передающей вибраторной антенны с плоским металлическим рефлектором, наблюдают принятые видеоимпульсы...
Наземний вимірювач кутових координат цілі
Номер патенту: 17671
Опубліковано: 15.03.2002
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: кутових, вимірювач, наземний, цілі, координат
Формула / Реферат:
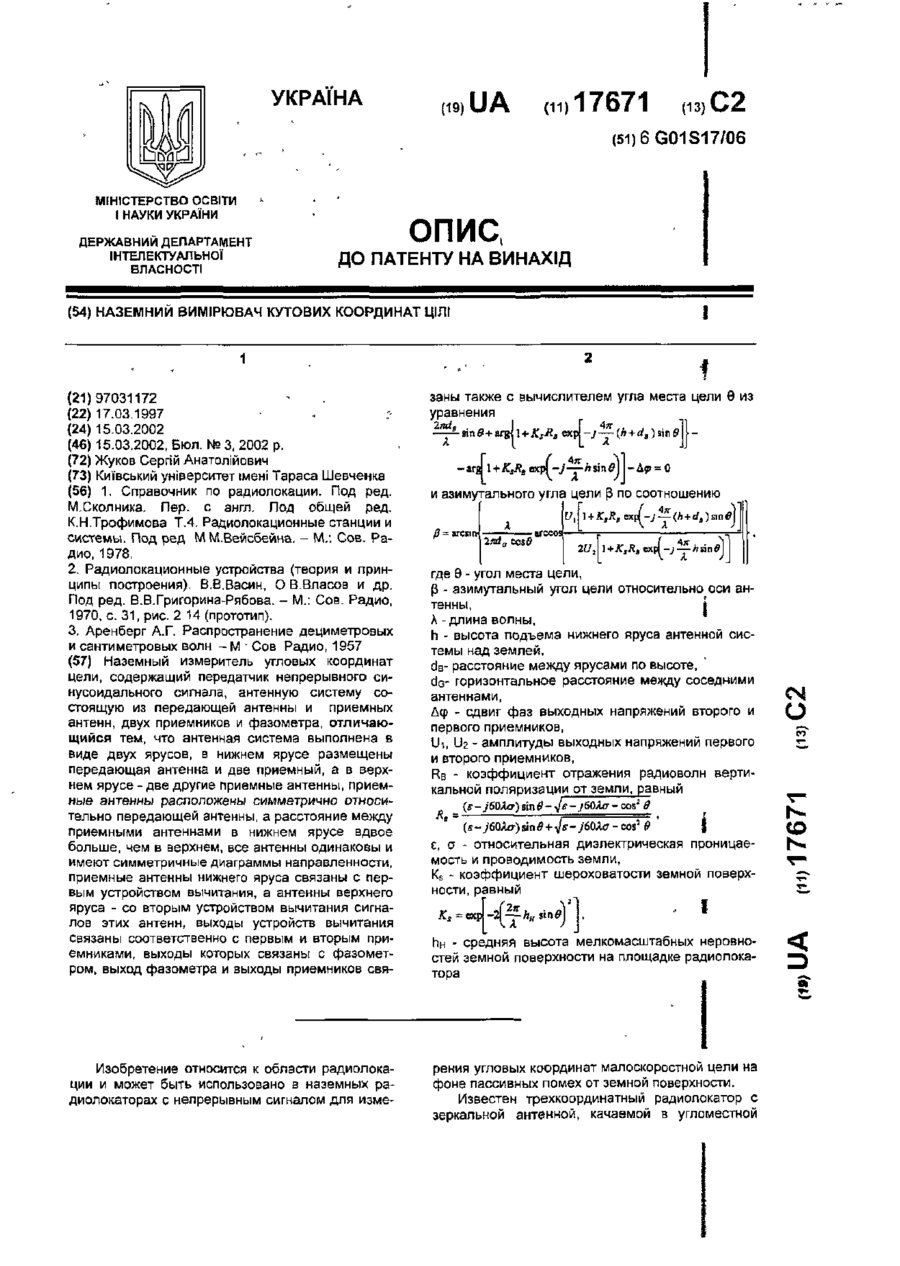
Наземный измеритель угловых координат цели, содержащий передатчик непрерывного синусоидального сигнала, антенную систему, состоящую из передающей антенны и двух приемных антенн, двух приемников и фазометра, отличающийся тем, что антенная система выполнена в виде двух ярусов, в нижнем ярусе размещены передающая антенна и две приемных, а в верхнем ярусе - две другие приемные антенны, приемные антенны расположены симметрично относительно...
Спосіб прицілювання і стрільби по цілі (варіанти) та пристрій для його реалізації
Номер патенту: 63616
Опубліковано: 15.01.2004
Автори: Марцинюк Віктор Іванович, Стефанович Віктор Тарасович, Кравченко Микола Іванович, Положенцев В'ячеслав Васильович, Глущенко Євген Миколайович, Демченко Леонтій Іванович
Мітки: варіанти, прицілювання, цілі, пристрій, реалізації, спосіб, стрільби
Формула / Реферат:
Корисна модель електрошлакового наплавлення, при якому електродний метал, що присаджують, подають у жужільну ванну, обмежену поверхнею, що наплавляють, і кристалізатором, який відрізняється тим, що наплавлення ведуть під кутом 10-75° до горизонтальної поверхні, при цьому заготівку, що наплавляють, обертають відносно кристалізатора, а кристалізатор переміщають уздовж наплавленої заготівки зі швидкістю, яку визначають датчиком контролю рівня...
Попередній патент: Сталевий корд для зміцнення гумових шин та/або конвеєрних стрічок
Наступний патент: Спосіб каталітичної нейтралізації газів, що відходять від автотранспорту
Випадковий патент: Спосіб формування каталітично активних шарів на титані та його сплавах