Електропривід постійного струму
Номер патенту: 46432
Опубліковано: 15.05.2002
Автори: Казаков Вадим Олександрович, Жукова Наталя Вікторовна, Тітієвський Володимир Маркович, Кузьменко Віктор Миколайович, Підгорний Ігор Вікторович, Литвинов Віктор Іванович

Формула / Реферат
Електропривід постійного струму, що містить задатчик і регулятор активної потужності на валу двигуна, з'єднаний з перемножником, входи якого з'єднані з датчиком струму якоря і датчиком кутової швидкості вала двигуна, який відрізняється тим, що він обладнаний комутатором струмового входу перемножника, інформаційні входи якого з'єднані з датчиком струму якоря і віртуальною уставкою струму якоря, рівною ІВ=Р/сwХХ, де с - електромагнітна постійна двигуна, wХХ - задана заправна кутова швидкість холостого ходу двигуна, ![]() - задана потужність електроприводу, і тригером стану електроприводу "потужність - швидкість", вихід якого з'єднаний з керуючим входом комутатора струмового входу перемножника, а вхід тригера підключений до виходу комбінаційного логічного пристрою, що реалізує логічну функцію
- задана потужність електроприводу, і тригером стану електроприводу "потужність - швидкість", вихід якого з'єднаний з керуючим входом комутатора струмового входу перемножника, а вхід тригера підключений до виходу комбінаційного логічного пристрою, що реалізує логічну функцію ![]()
![]()
![]()
![]() +
+ ![]()
![]()
![]() де
де ![]() - вихід компаратора швидкості,
- вихід компаратора швидкості, ![]() -вихід компаратора струму,
-вихід компаратора струму, ![]() - вихід тригера стану,
- вихід тригера стану, ![]() - вихід комбінаційного логічного пристрою, а також опорою компаратора швидкості, підключеною через нормуючий підсилювач з коефіцієнтом, рівним 1/СІВ, до задатчика потужності, і опорою компаратора струму, підключеною до віртуальної уставки
- вихід комбінаційного логічного пристрою, а також опорою компаратора швидкості, підключеною через нормуючий підсилювач з коефіцієнтом, рівним 1/СІВ, до задатчика потужності, і опорою компаратора струму, підключеною до віртуальної уставки ![]() струму якоря.
струму якоря.
Текст
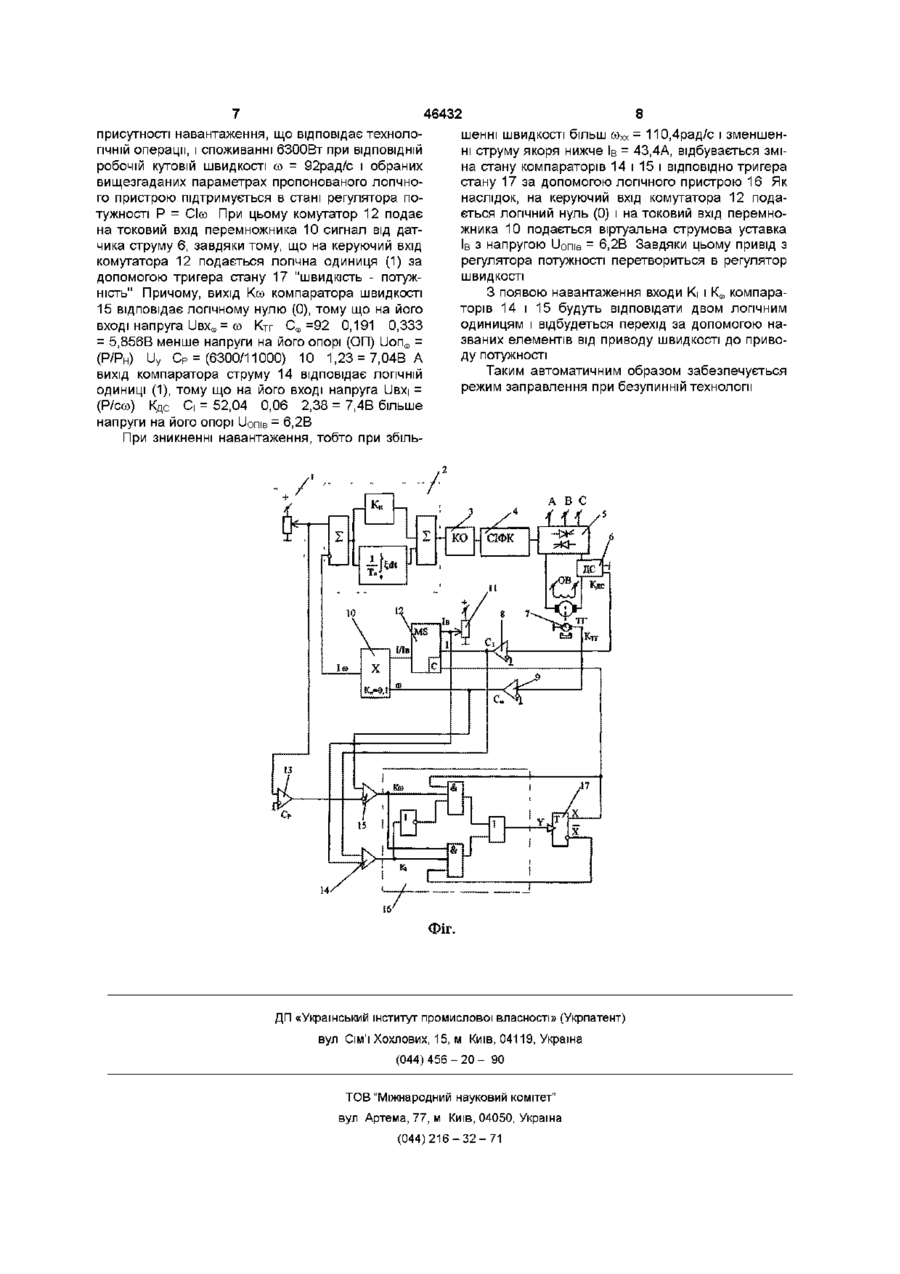
Електропривід постійного струму, що містить задатчик і регулятор активної потужності на валу двигуна, з'єднаний з перемножником, входи якого з'єднані з датчиком струму якоря і датчиком кутової швидкості вала двигуна, який відрізняється тим, що він обладнаний комутатором струмового входу перемножника, інформаційні входи якого з'єднані з датчиком струму якоря і віртуальною уставкою струму якоря, рівною Ів=Р/соохх, де с Винахід відноситься до електротехніки і може бути використаним у безупинних багатодвигунових технологічних ЛІНІЯХ обробки металу тиском (ОМТ), електропривід яких керується за завданням потужності Відомий електропривід постійного струму, який забезпечує задану електромагнітну потужність на валу двигуна за допомогою замкнутого контуру регулювання зі зворотним зв'язком у виді перемножника сигналів, пропорційних струму якоря і кутової швидкості вала двигуна (Башарин А В , Новиков В А , Соколовский Г Г Керування електроприводами Навчальний посібник для вузів — Л Энергоиздат Ленінградське відділення, 1982 р — 392 с , іл , див стор 278 - 293) Недоліком зазначеного електропривода є неможливість його роботи при зникненні навантаження, тому що двигун зі зворотним зв'язком по потужності прискорюється до досягнення максимально можливої швидкості, що відповідає максимальній напрузі регульованого джерела живлення Відомий багатодвигуновий електропривід, застосовуваний у безупинній технологічній лінії ОМТ, електромагнітна постійна двигуна, сохх - задана заправна кутова швидкість холостого ходу двигуна, Р - задана потужність електроприводу, і тригером стану електроприводу "потужність швидкість", ВИХІД ЯКОГО з'єднаний з керуючим вхо дом комутатора струмового входу перемножника, а вхід тригера підключений до виходу комбінаційного логічного пристрою, що реалізує логічну функцію Y = К га К : X + К га К : X де К га вихід компаратора швидкості, К : -вихід компаратора струму, X - вихід тригера стану, Y - вихід комбінаційного логічного пристрою, а також опорою компаратора швидкості, підключеною через нормуючий підсилювач з коефіцієнтом, рівним 1/СІв, до задатчика потужності, і опорою компаратора струму, підключеною до віртуальної уставки струму якоря у якому всі локальні електроприводи керуються тільки по активній потужності на валу двигуна (див Спосіб керування електроприводом безупинної технологічної лінії обробки металу тиском ОАО "Завод "Універсальне устаткування", Деклараційний патент України № 36424 А прототип винахоДУ) Зазначений електропривід має істотний недолік Даний багатодвигуновий електропривід, локально керований тільки по потужностях, не забезпечує в автоматичному режимі важливий елемент безупинної технології ОМТ - послідовне заправлення деформуємого металу в робочі КЛІТІ У процесі цього заправлення в тих клітях, де метал ще відсутній, ВІДПОВІДНІ локальні електроприводи не навантажені Керування локального електропривода по потужності припускає наявність навантаження, що відповідає локальній технологічні операції Тому в режимі заправлення, де відсутнє навантаження, система керування по потужності змушує двигун прискорюватися до максимально можливої швидкості Тобто, існує протиріччя з одного боку - у ро со (О 46432 бочому режимі локальний електропривід повинен - регулятор потужності, з єднаний з перемножкеруватися по заданій потужності, а з іншого боку ником, входи якого з'єднані з датчиком струму - у процесі заправлення двигун повинен забезпеякоря і датчиком кутової швидкості вала двигуна чувати лінійну швидкість частини калібру робочих ВІДМІТНИМИ ВІД прототипу істотними ознаками валків, що повинна трохи перевищувати лінійну є швидкість металу, що заходить у вогнище дефор- Наявність комутатора струмового входу пемації, тим самим забезпечуючи режим заправленремножника, інформаційні входи якого з'єднані з ня і захоплення металу валками датчиком струму якоря і віртуальною уставкою В основу винаходу поставлена задача удоструму якоря, рівною їв = Р/ссо», де с - електромасконалити електропривід, регульований по потужгнітна постійна двигуна, сохх - задана заправна ності, шляхом оснащення приводу елементами, кутова швидкість холостого ходу двигуна, Р - зазавдяки яким забезпечується в автоматичному дана потужність електропривода режимі необхідна заправна швидкість інструмента - Наявність тригера стану електропривода "почи холостого ходу двигуна при відсутності навантужність - швидкість", ВИХІД ЯКОГО з'єднаний з кетаження руючим входом комутатора струмового входу пеСутність винаходу полягає в тому, що електремножника, а вхід цього тригера підключений до ропривід постійного струму, що містить задатчик і виходу комбінаційного логічного пристрою, що регулятор активної потужності на валу двигуна, реалізує логічну функцію Y = KcoK|X+КсоК,Х , де з'єднаний з перемножником, входи якого з'єднані з Ксо - вихід компаратора швидкості, К| - вихід комдатчиком струму якоря і датчиком кутової швидкості вала двигуна, що відрізняється тим, що він попаратора струму, X - вихід тригера стану, Y - вистачений комутатором струмового входу перехід комбінаційного логічного пристрою множника, інформаційні входи якого з'єднані з - Опора компаратора швидкості підключена датчиком струму якоря і віртуальною уставкою через нормуючий підсилювач з коефіцієнтом, рівструму якоря, рівної їв = Р/ссохх, де с - електромагним 1/сІв, до задатчика потужності, а опора компанітна постійна двигуна, сохх - задана заправна куратора струму підключена до віртуальної уставки това швидкість холостого ходу двигуна, Р - задана струму якоря потужність електропривода, і тригером стану елекПерераховані ІСТОТНІ ознаки є необхідними і тропривода "потужність - швидкість", ВИХІД ЯКОГО достатніми для усіх випадків, на які поширюється з'єднаний з керуючим входом комутатора токового область використання винаходу входу перемножника, а вхід тригера підключений Між ІСТОТНИМИ ознаками винаходу і технічним до виходу комбінаційного логічного пристрою, що результатом забезпеченням режиму заправлення робочого тіла в безупинну багатодвигунову технореалізує логічну функцію Y = KcoK|X+КсоК|Х , де логічну ЛІНІЮ ОМТ, електропривід якої керується за Ксо - вихід компаратора швидкості, К| - вихід комзавданням потужності - існує причинно-слідчий паратора струму, X - вихід тригера стану, Y - визв'язок, що пояснюється наступними доводами хід комбінаційного логічного пристрою, а також Регульований електропривід за завданням активопорою компаратора швидкості, підключеною ченої потужності на валу двигуна, рівної Р = сію, порез нормуючий підсилювач з коефіцієнтом, рівним будований зі зворотним зв'язком, пропорційним 1/сІв, до задатчика потужності, і опорою компарацьому добутку Отже, якщо зникає навантаження тора струму, підключено до віртуальної уставки на двигун, електропривід по потужності трансфорструму якоря мується в регульований привід по швидкості при Виходячи із сутності винаходу при відсутності заміні в зворотному зв'язку реального сигналу від навантаження до струмового входу перемножника датчика струму на віртуальну уставку струму якодвох сигналів, пропорційних струму якоря і кутовій ря, що дорівнює їв = Р/ссохх Це можна зробити зашвидкості ротора двигуна, підключається віртуавдяки тому, що, як показує практика, електромагнільна уставка струму якоря, рівна заданій робочій тна потужність, вкладена в технологічний процес потужності двигуна Р, діленій на необхідну запраОМТ, пропорційна швидкості Р ~ со, тому що нававну кутову швидкість холостого ходу двигуна їв = нтаження практично не залежить від швидкості А Р/оохх, а з появою навантаження до згаданого тому що заправна швидкість со»; повинна бути біструмового входу перемножника підключається льше робочої сохх = 1,2со, то відношення двох змінсигнал, пропорційний струму якоря двигуна них величин Р и ссохх практично не буде змінюваОзнакою переходу від приводу потужності до тися при ЗМІНІ продуктивності безупинного приводу швидкості при відсутності навантаження є технологічного процесу Отже, названу віртуальну переоберти двигуна стосовно названої швидкості уставку струму якоря, рівну їв = Р/ссохх, з достатйого холостого ходу, що задається в 1,2 рази біньою точністю можна прийняти за постійну, що льше робочої швидкості Юх = 1,2со У зв'язку з тим, х необхідно для побудови електропривода по швидщо привід швидкості підтримує швидкість на задакості, що починає виконувати свою функцію з поному рівні з появою навантаження, то зворотний явою віртуальної уставки струму якоря на струмоперехід від приводу швидкості до приводу потужвому вході перемножника зворотного зв'язку ності здійснюється по ознаці збільшення електроПричому привід швидкості, завдяки такій віртуальмагнітного моменту, тобто струму якоря, стосовно ний уставці, забезпечує необхідну швидкість заназваної віртуальної уставки струму якоря правлення сохх при тій же заданій потужності, тому Загальними з прототипом істотними ознаками що рівність вираження Р = clco =c(P/clcoxx)co може винаходу є бути тільки при со = со» - задатчик потужності, 46432 Зворотний перехід від швидкості до потужності, з появою навантаження, здійснюється зворотним переключенням струмового входу перемножника з віртуальної струмової уставки на реальний сигнал струму якоря Причому, що дуже важливо, у момент захоплення робочого тіла валками, швидкість у привода по швидкості під час появи навантаження природно упаде, чим забезпечується вже робочий режим приводу по потужності Тому при заміні струмової галузі в зворотному зв'язку вихід перемножника практично не міняється, тому що сигнали, що перемножуються, під час цього перехідного процесу поводяться обернено - пропорційним образом Отже регулятор не випробує ударний вплив зворотного зв'язку при заміні и елементів Тому не потрібно спеціальних заходів для динамічного демпфірування такого складного перехідного процесу У зв'язку з тим, що електропривід має всього два стани "швидкість" чи "потужність", для його ідентифікації необхідний тільки один тригер, наприклад тригер з рахунковим входом Y, вихід якого X з'єднаний з керуючим входом комутатора токового входу перемножника зворотного зв'язку Логічний перехід від "потужності" до "швидкості", при зникненні навантаження, здійснюється при збільшенні швидкості і появі на виході компаратора швидкості Кш логічної одиниці (1), а також при зменшенні струму якоря і появі на виході компаратора струму К| логічного нуля (0) Це забезпечується ВІДПОВІДНИМИ опорами компараторів, що з'єднані з задатчиком потужності Р через нормуючий підсилювач з коефіцієнтом підсилення рівним 1/сІв і віртуальною уставкою струму якоря їв Після переходу привід швидкості підтримує швидкість ротора двигуна, рівної сохх компараторів струму 14 і швидкості 15, з'єднаних через нормуючі підсилювачі 8 і 9 з датчиком струму 6 і датчиком швидкості 7 і ВІДПОВІДНИМИ опорами - віртуальною струмовою уставкою 11 і задатчиком потужності 1 Компаратори струму 14 і швидкості 15 з'єднані з комбінаційним логічним пристроєм 16, що складається з двох елементів "І", одного елемента "ЧИ" і одного елемента "НІ" Логічний пристрій 16 реалізує логічну функцію Y = KcoK|X+KcoK|X , вихід Y пристрою 16 з'єднаний із тригером 17 з рахунковим входом, що визначає стан електропривода "потужністьшвидкість" Вихід X тригера 17 з'єднаний з керуючим входом комутатора 12 токового входу перемножника 10 Електропривід працює в такий спосіб Розглянемо комплектний електропривід, що містить ЭПУ 12 - 40 - 27М, 100А, 230В, коефіцієнт передачі датчика струму КДС = 0.06В/А та електродвигун 4 ПНМ 160LT з номінальними (н) параметрами Р н = 11 квт, Ін = 57А, U H = 220В, N H = 1400об/хв, коефіцієнт передачі тахогенератора КЦ = 20 103В-хв/об = 0,191В-с/рад Електромагнітна постійна двигуна визначається з вираження його потужності Р н = сінюн, с = Рн • 60/ Ін • 2л N H = 11000 • 60/ 57 • 1400 2л = 1,316В-С/рад, сон = 2л NH/ 60 = 146,6рад/с Задатчик потужності 1 задає на регулятор 2 напругу 0 - 10В, що відповідає 0 - 11000Вт Отже режим рівноваги системи заданої й отриманий на двигуні потужності забезпечується вибором коефіцієнтів підсилення Сі и Сф нормуючих підсилювачів 8 і 9, з'єднаних з датчиком струму 6 і оборотів 7 При внутрішньому коефіцієнті Кп = 0,1 перемножника 10, зазначений баланс потужностей вихо Логічний перехід від "швидкості" до "потужності" з появою навантаження здійснюється з появою на виході компаратора струму К| логічної одиниці (1) і збереженні логічної одиниці (1) на виході компаратора ШВИДКОСТІ С » О; Такий простий автомат з пам'яттю отриманий за допомогою комбінаційного пристрою, що реалізує структурну формулу Y = KcoK|X+KcoK|X (граф дить з ВІДПОВІДНОСТІ Рн = 11 кВт -> - схема автомата і його таблиця ІСТИННОСТІ тут не показані) і тригера стану "швидкість -потужність" Сутність винаходу пояснюється функціональною схемою електропривода, що складається з електропривода, керованого по потужності, і логічного пристрою керування переходом приводу "потужності" до приводу "швидкості" І навпаки Електропривід потужності складається з послідовно з'єднаних між собою елементів задатчика 1 і регулятора 2 потужності, керуючого органа (КО) 3, системи імпульсно-фазового керування (СІФК) 4, керованого силового тиристорного випрямляча 5, датчика струму (ДС) 6, тахогенератора (ТГ) чи датчика швидкості 7, нормуючих підсилювачів 8 і 9 названих датчиків і перемножникаЮ сигналів від датчиків струму якоря 6 і датчика швидкості двигуна 7 Для потужності Р = 6300Вт, споживаної на технологічну операцію при її продуктивності, що відповідає кутовій швидкості вала двигуна с = о 92рад/с, його заправна швидкість сохх = 1,2 • 92 = 110,4рад/с Тоді віртуальній струмовій уставці їв = Р/сюхх = 6300 / (1,316 110,4) = 43.4А відповідає напруга ІІопів = їв • К д с • С, = 43,4 • 0,06 • 2,38 = 6,2В, що є опорою компаратора струму 14 Опора компаратора кутової швидкості прямо пропорційно залежить від заданої потужності Р и дорівнює заправній швидкості холостого ходу двигуна (сохх = Р/с І в Тому нормуючий підсилювач 13, вхід якого з'єднаний із задатчиком потужності 1 має коефіцієнт підсилення Ср, що задовольняє вираженню Р • Названий логічний пристрій складається з віртуальної токової уставки 11, комутатора Стокового входу перемножника 10, нормуючого підсилювача 13, з'єднаного з задатчиком потужності 1, Uy = 10В при нерівності розмірностей 60 ІО 10* ; 0,794. 1,316 57-14000,1 0,06-20 При С=1/3=0,333, С ,=0,794-3=3,38 С Р = (Ox* ТОДІ Си • Отже, => 110,4 0,191-0,333 «1,23 ЧИ (6,3/11)10 1 1,23 1,316-43,4 0,06 2,3S0,l замкнута система електропривода в 46432 присутності навантаження, що відповідає технологічній операції, і споживанні 6300Вт при ВІДПОВІДНІЙ робочій кутовій швидкості с = 92рад/с і обраних о вищезгаданих параметрах пропонованого логічного пристрою підтримується в стані регулятора потужності Р = Сію При цьому комутатор 12 подає на токовий вхід перемножника 10 сигнал від датчика струму 6, завдяки тому, що на керуючий вхід комутатора 12 подається логічна одиниця (1) за допомогою тригера стану 17 "швидкість - потужність" Причому, вихід Ксо компаратора швидкості 15 відповідає логічному нулю (0), тому що на його вході напруга ивх ш = ю К т г Сф =92 0,191 0,333 = 5,856В менше напруги на його опорі (ОП) иоп ш = (Р/Рн) U y С Р = (6300/11000) 10 1,23 = 7,04В А вихід компаратора струму 14 відповідає ЛОГІЧНІЙ ОДИНИЦІ (1), тому що на його вході напруга ІІвхі = (Р/ссо) Кдс С, = 52,04 0,06 2,38 = 7,4В більше напруги на його опорі ІІопів - 6,2В При зникненні навантаження, тобто при збіль 8 шенні швидкості більш сохх = 110,4рад/с і зменшенні струму якоря нижче їв = 43,4А, відбувається зміна стану компараторів 14 і 15 і ВІДПОВІДНО тригера стану 17 за допомогою логічного пристрою 16 Як наслідок, на керуючий вхід комутатора 12 подається логічний нуль (0) і на токовий вхід перемножника 10 подається віртуальна струмова уставка їв з напругою ІІопів - 6,2В Завдяки цьому привід з регулятора потужності перетвориться в регулятор швидкості З появою навантаження входи К| і Кш компараторів 14 і 15 будуть відповідати двом логічним одиницям і відбудеться перехід за допомогою названих елементів від приводу швидкості до приводу потужності Таким автоматичним образом забезпечується режим заправлення при безупинній технології A B C Фіг. ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044)456-20- 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Автори англійськоюTitiievskyi Volodymyr Markovych, Litvinov Biktor Ivanovych, Lytvynov Biktor Ivanovych, Lytvynov Viktor Ivanovych, Kuzmenko Viktor Mykolaiovych, Pidhornyi Ihor Viktorovych
Автори російськоюТитиевский Владимир Маркович, Литвинов Виктор Иванович, Кузьменко Виктор Николаевич, Подгорный Игорь Викторович
МПК / Мітки
МПК: H02P 5/68
Мітки: електропривід, струму, постійного
Код посилання
<a href="https://ua.patents.su/4-46432-elektroprivid-postijjnogo-strumu.html" target="_blank" rel="follow" title="База патентів України">Електропривід постійного струму</a>
Електропривід постійного струму
Номер патенту: 3657
Опубліковано: 27.12.1994
Автори: Прокопенко Олександр Адольфович, Литвин Микола Сергійович, Гольц Марк Єфимович, Бердюгін Валерій Георгійович
МПК: H02P 7/06
Мітки: електропривід, постійного, струму
Формула / Реферат:
1. Электропривод постоянного тока, содержащий электродвигатель, подключенный к источнику питания через четырехключевой мостовой реверсор, последовательно соединенные тахогенератор, регулятор скорости, релейный регулятор тока с двумя парами противофазных выходов рассогласования по току и дополнительными противофазными выходами рассогласования по скорости, блок управления силовыми ключами, подключенный выходами ко входам реверсора, датчик...
Електропривід постійного струму
Номер патенту: 5006
Опубліковано: 28.12.1994
Автори: Мілютін Валентин Миколайович, Ніколаєнко Борис Леонтійович, Сідєльнікова Олена Васильівна, Ясинецький Віктор Андрійович
МПК: H02P 7/06
Мітки: постійного, електропривід, струму
Формула / Реферат:
Электропривод постоянного тока, содержащий электродвигатель с датчиком скорости, выход которого подключен к первому формирователю коротких им пульсов, к якорной обмотке электродвигателя подключен усилитель мощности, генератор эталонной частоты, соединенный с вторым формирователем коротких импульсов, о т л и ч а ю щ и й с я тем, что, с целью повышения надежности, в него введены сдвиговый регистр и схема ИЛИ, причем вход старшего раз ряда и...
Електропривід постійного струму
Номер патенту: 8872
Опубліковано: 30.09.1996
Автори: Мороз Юрій Вікторович, Кутрань Ігор Сергійович, Янченко Леонід Петрович
МПК: H02P 7/06
Мітки: постійного, струму, електропривід
Формула / Реферат:
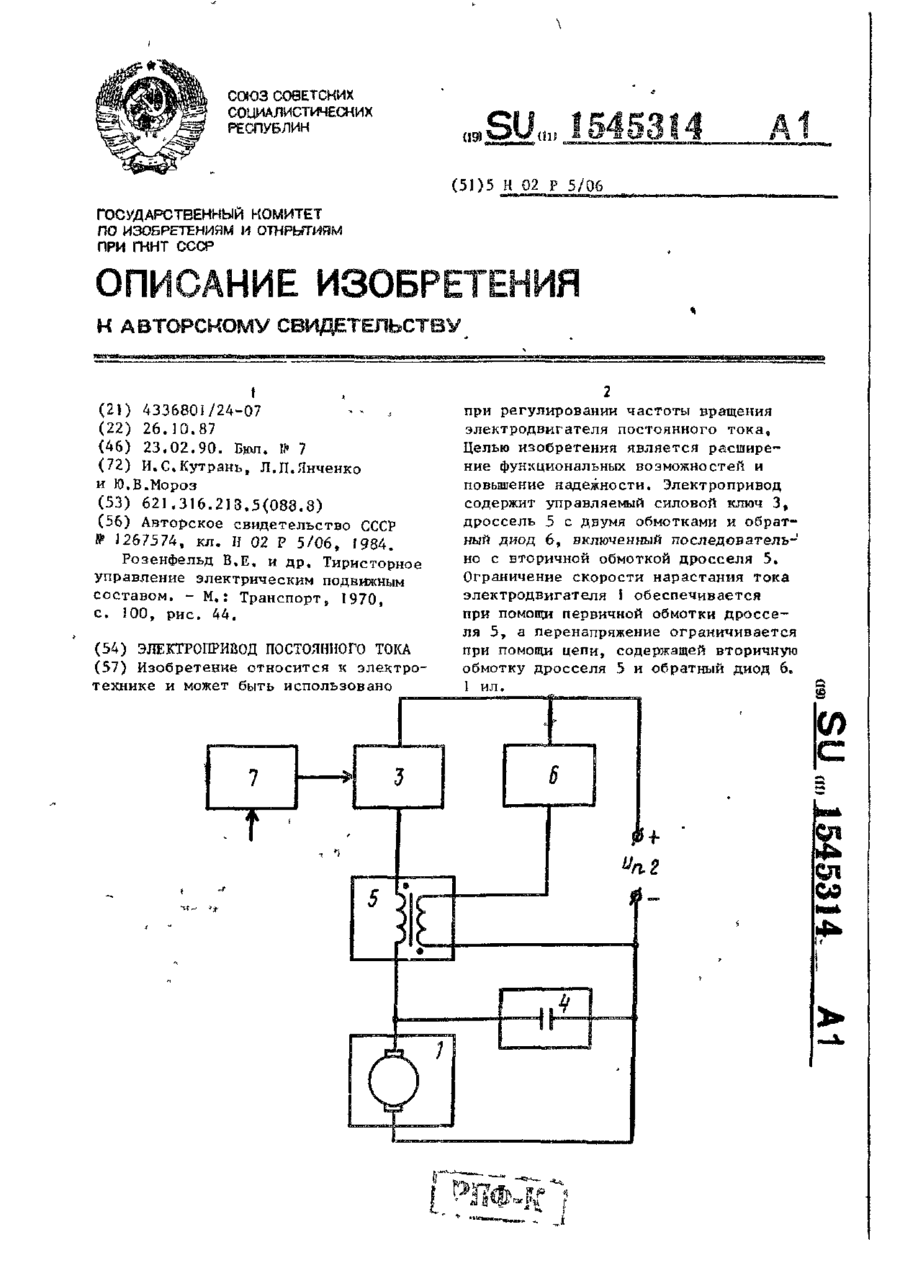
Электропривод постоянного тока, содержащий электродвигатель, первым выводом подключенный к первому выводу источника питания, управляемый силовой ключ, первым выводом подключенный к второму выводу источника питания, конденсатор, дроссель с двумя обмотками и диод, включенный последовательно с вторичной обмоткой дросселя, отличающийся тем, что, с целью расширения функциональных возможностей и повышения надежности, конденсатор подключен...
Електропривід з релейним керуванням
Номер патенту: 31224
Опубліковано: 15.12.2000
Автори: Савченко Сергій Борисович, Казачковський Микола Миколайович
МПК: H02P 7/06
Мітки: релейним, керуванням, електропривід
Текст:
...зг єднаний з виходом другого суматора, перший вхід якого підключений до виходу давача струму, другий вхід - до виходу давача напруги, третій вхід - до виходу третього блока диференціювання, п' ятнй вхід - до виходу задавача мінімальної напруги силового фільтра, вихід блока виділення модуля з' єднаний з входом третього блока диференціювання та з четвертям входом другого суматора, а ного вхід підключений до виходу третього суматора,...
Система релейного управління збудженням двигуна постійного струму
Номер патенту: 33414
Опубліковано: 15.02.2001
Автори: Шевченко Наталія Іванівна, Зеленов Анатолій Борисович
МПК: H02P 7/06
Мітки: управління, релейного, збудженням, система, двигуна, постійного, струму
Текст:
...релейний регулятор з суматором на його вході, до якого під'єднані сигнал завдання та вихід датчика ерс цього тиристорного збуджувача, а вхід з датчика під'єнаний до виходу тиристорного збуджувача, у відповідності з винаходом додатково вводяться датчики струму збудження, ерс та швидкості двигуна, входи яких підімкнені до відповідних виходів двигуна, а виходи датчиків струму збудження і ерс двигуна з'єднані з входами комутатора...