Система автоматизованого керування робочим органом транспортної мережі
Номер патенту: 48520
Опубліковано: 15.08.2002
Автори: Ощипок Ігор Миколайович, Занічковська Любов Володимирівна
Формула / Реферат
Система автоматизованого керування робочим органом транспортної мережі, що складається з робочого органа транспортної мережі, транспортного шляху з навантажувально-розвантажувальними постами, двигуна, яка відрізняється тим, що в робочому органі транспортної мережі встановлений блок пам'яті, забезпечений відповідними командами блока зв'язку, з’єднаного з пультом керування, укомплектованим програмованим мікропроцесором, блок пам'яті через блок зв'язку з'єднаний з пультом керування системою і з блоком виводу інформації, розвантажувальні перекидачі встановлені біля верстатів, обладнані блоками вмикання при наявності робочого струму в зоні їх обслуговування, робочий орган, обладнаний датчиком маси і датчиком рівня і з можливістю вмикання після завантаження за інформацією від датчика маси чи датчика рівня /чи обох датчиків/, робочий орган введений в систему з можливістю забезпечення переміщення технологічними маршрутами.
Текст
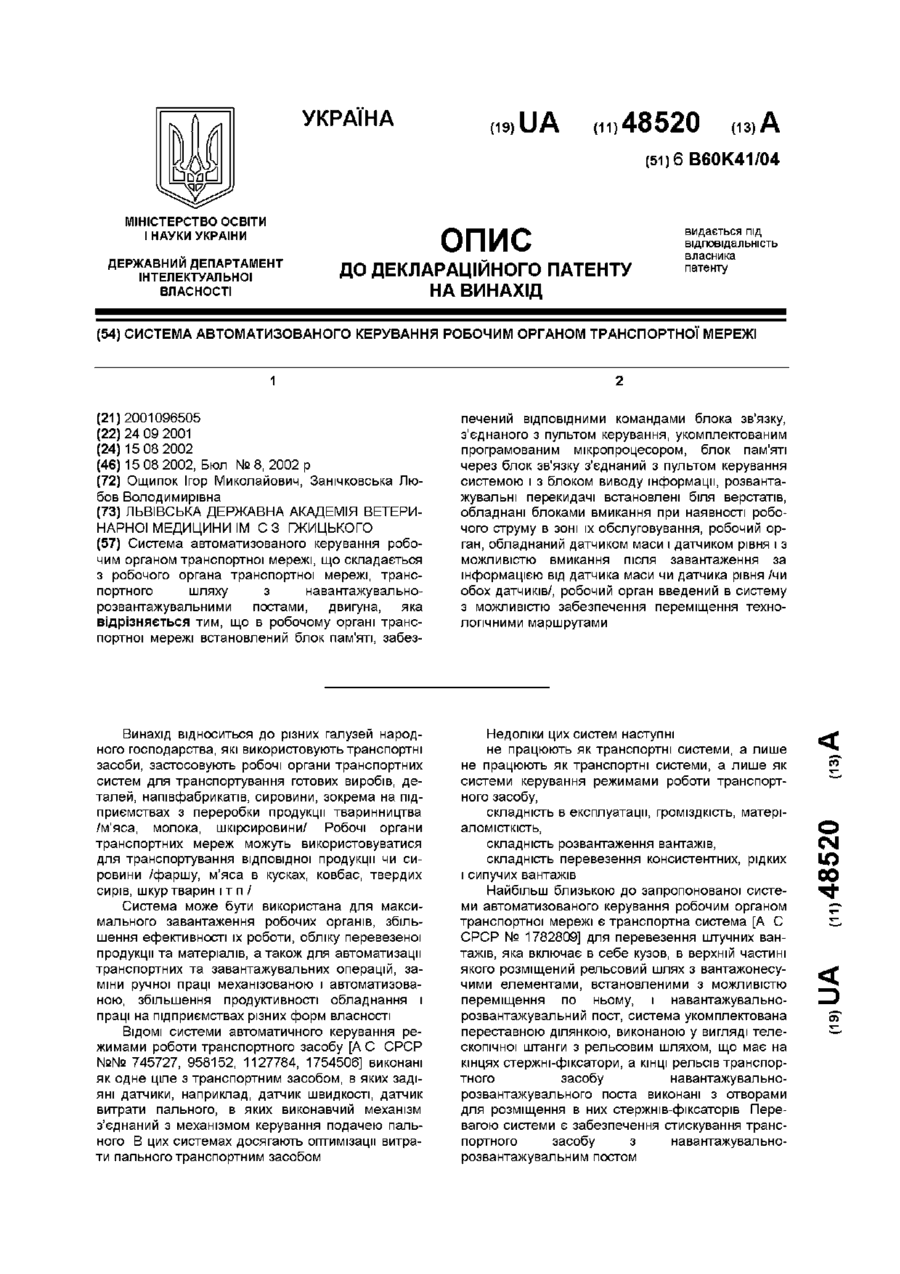
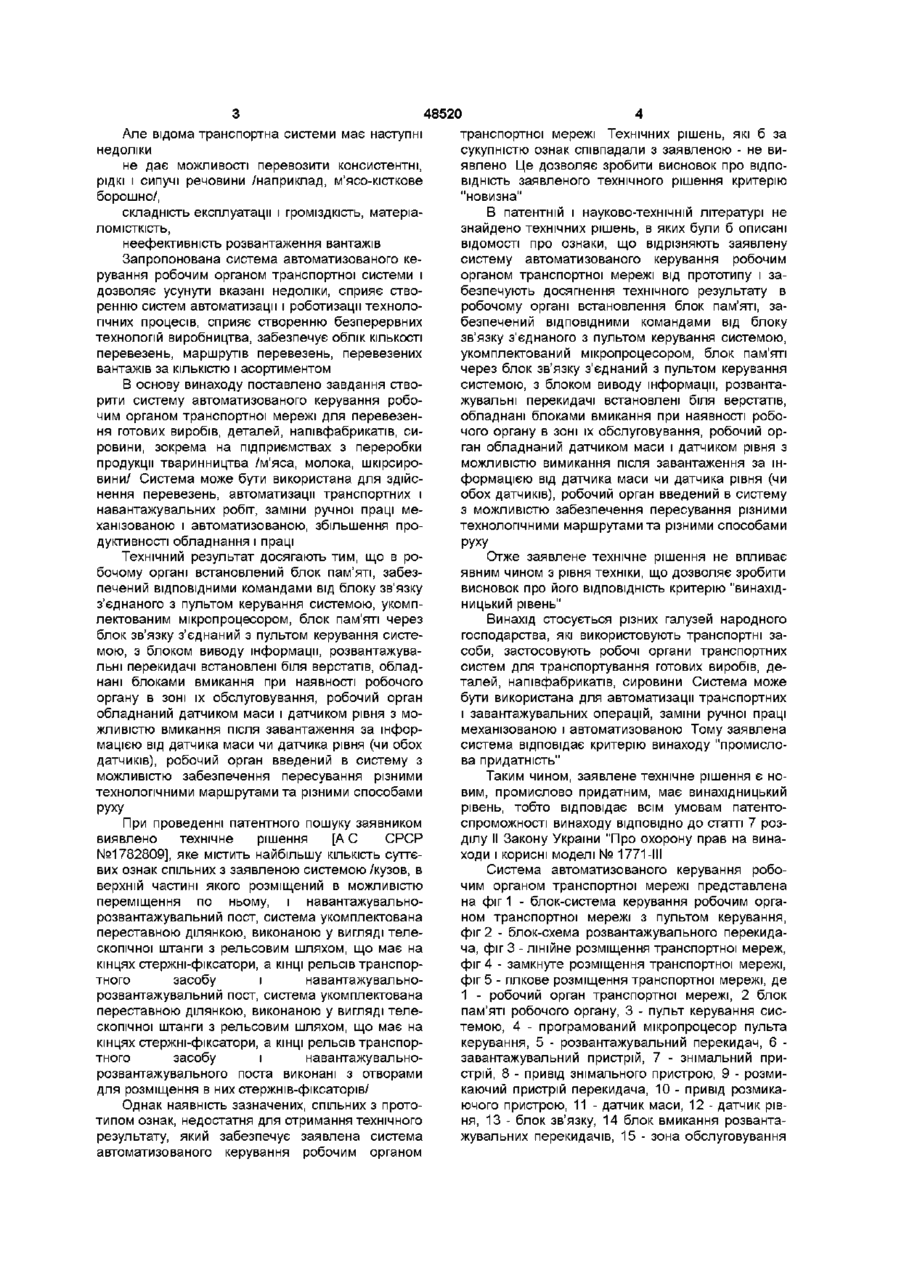
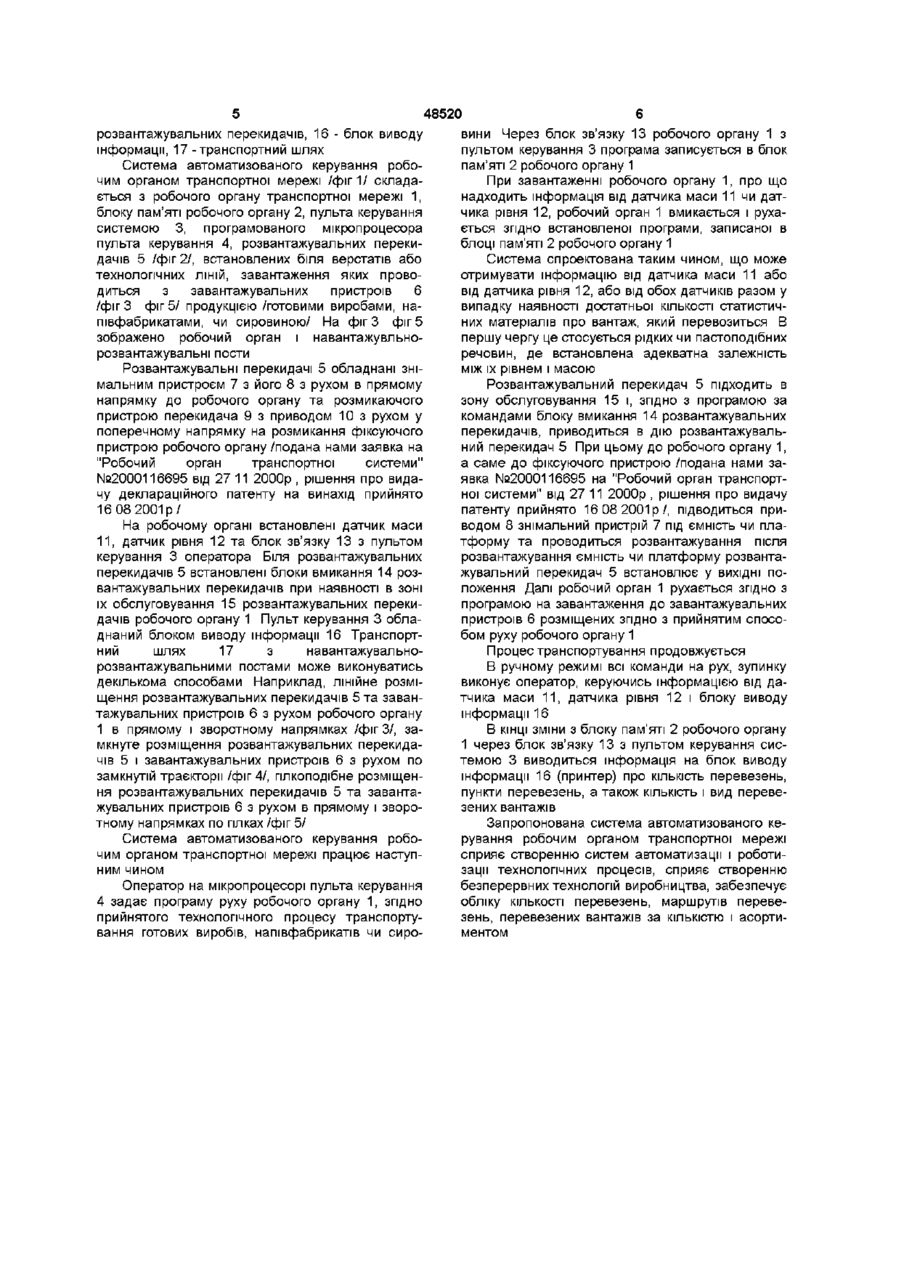
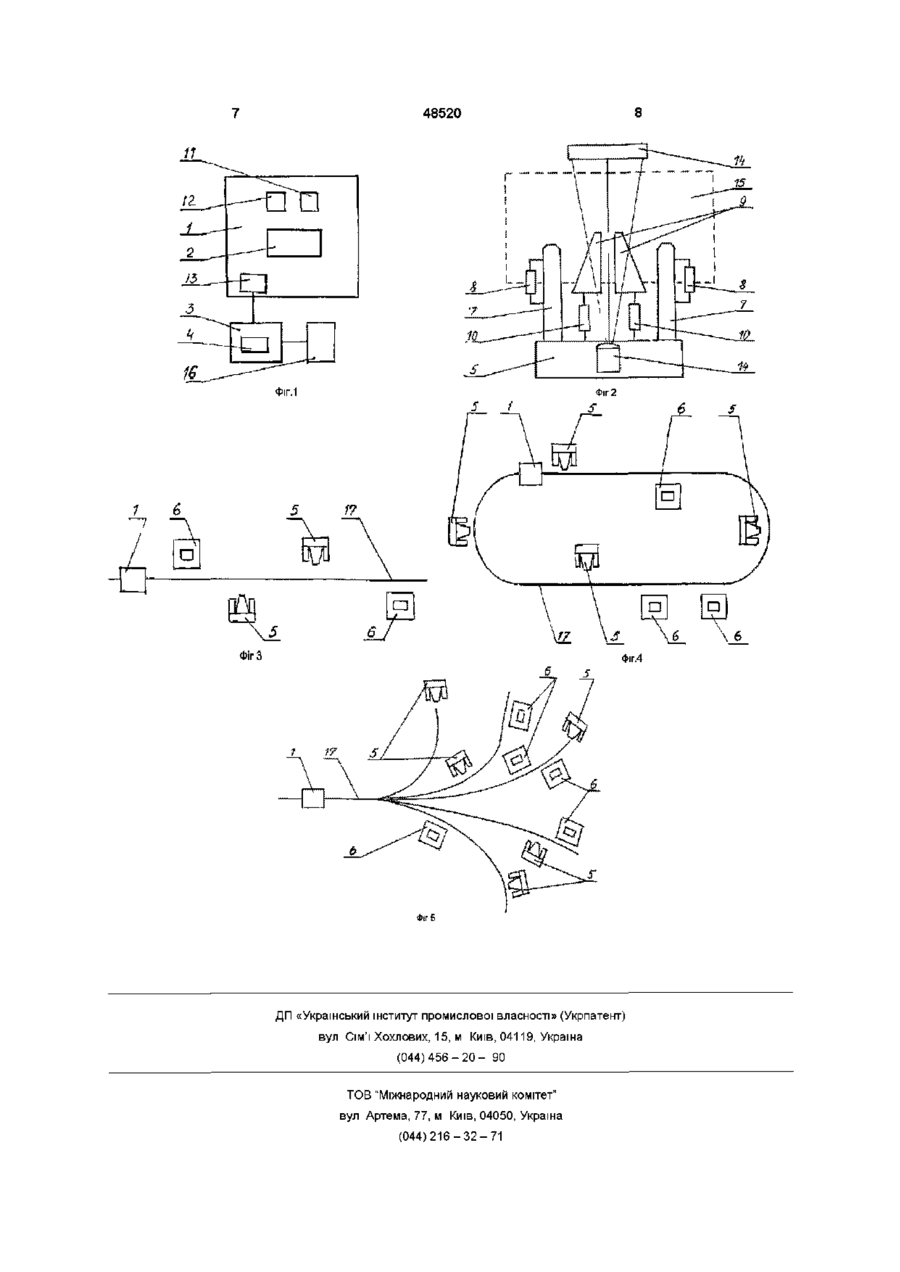
Система автоматизованого керування робочим органом транспортної мережі, що складається з робочого органа транспортної мережі, транспортного шляху з навантажувальнорозвантажувальними постами, двигуна, яка відрізняється тим, що в робочому органі транспортної мережі встановлений блок пам'яті, забез печений ВІДПОВІДНИМИ командами блока зв'язку, з'єднаного з пультом керування, укомплектованим програмованим мікропроцесором, блок пам'яті через блок зв'язку з'єднаний з пультом керування системою і з блоком виводу інформації, розвантажувальні перекидачі встановлені біля верстатів, обладнані блоками вмикання при наявності робочого струму в зоні їх обслуговування, робочий орган, обладнаний датчиком маси і датчиком рівня і з можливістю вмикання після завантаження за інформацією від датчика маси чи датчика рівня /чи обох датчиків/, робочий орган введений в систему з можливістю забезпечення переміщення технологічними маршрутами Винахід відноситься до різних галузей народного господарства, які використовують транспортні засоби, застосовують робочі органи транспортних систем для транспортування готових виробів, деталей, напівфабрикатів, сировини, зокрема на підприємствах з переробки продукції тваринництва /м'яса, молока, шкірсировини/ Робочі органи транспортних мереж можуть використовуватися для транспортування відповідної продукції чи сировини /фаршу, м'яса в кусках, ковбас, твердих сирів, шкур тварин і т п / Система може бути використана для максимального завантаження робочих органів, збільшення ефективності їх роботи, обліку перевезеної продукції та матеріалів, а також для автоматизації транспортних та завантажувальних операцій, заміни ручної праці механізованою і автоматизованою, збільшення продуктивності обладнання і праці на підприємствах різних форм власності ВІДОМІ системи автоматичного керування режимами роботи транспортного засобу [А С СРСР №№ 745727, 958152, 1127784, 1754506] виконані як одне ціле з транспортним засобом, в яких задіяні датчики, наприклад, датчик швидкості, датчик витрати пального, в яких виконавчий механізм з'єднаний з механізмом керування подачею пального В цих системах досягають оптимізацм витрати пального транспортним засобом Недоліки цих систем наступні не працюють як транспортні системи, а лише не працюють як транспортні системи, а лише як системи керування режимами роботи транспортного засобу, складність в експлуатації, громіздкість, матеріаломісткість, складність розвантаження вантажів, складність перевезення консистентних, рідких і сипучих вантажів Найбільш близькою до запропонованої системи автоматизованого керування робочим органом транспортної мережі є транспортна система [А С СРСР № 1782809] для перевезення штучних вантажів, яка включає в себе кузов, в верхній частині якого розміщений рельсовий шлях з вантажонесучими елементами, встановленими з можливістю переміщення по ньому, і навантажувальнорозвантажувальний пост, система укомплектована переставною ділянкою, виконаною у вигляді телескопічної штанги з рельсовим шляхом, що має на кінцях стержні-фіксатори, а КІНЦІ рельсів транспортного засобу навантажувальнорозвантажувального поста виконані з отворами для розміщення в них стержнів-фіксаторів Перевагою системи є забезпечення стискування транспортного засобу з навантажувальнорозвантажувальним постом ю 00 48520 Але відома транспортна системи має наступні недоліки не дає можливості перевозити консистентні, рідкі і сипучі речовини /наприклад, м'ясо-кісткове борошно/, складність експлуатації і громіздкість, матеріаломісткість, неефективність розвантаження вантажів Запропонована система автоматизованого керування робочим органом транспортної системи і дозволяє усунути вказані недоліки, сприяє створенню систем автоматизації і роботизації технологічних процесів, сприяє створенню безперервних технологій виробництва, забезпечує облік КІЛЬКОСТІ перевезень, маршрутів перевезень, перевезених вантажів за КІЛЬКІСТЮ І асортиментом В основу винаходу поставлено завдання створити систему автоматизованого керування робочим органом транспортної мережі для перевезення готових виробів, деталей, напівфабрикатів, сировини, зокрема на підприємствах з переробки продукції тваринництва /м'яса, молока, шкірсировини/ Система може бути використана для здійснення перевезень, автоматизації транспортних і навантажувальних робіт, заміни ручної праці механізованою і автоматизованою, збільшення продуктивності обладнання і праці Технічнийрезультат досягають тим, що в робочому органі встановлений блок пам'яті, забезпечений ВІДПОВІДНИМИ командами від блоку зв'язку з'єднаного з пультом керування системою, укомплектованим мікропроцесором, блок пам'яті через блок зв'язку з'єднаний з пультом керування системою, з блоком виводу інформації, розвантажувальні перекидачі встановлені біля верстатів, обладнані блоками вмикання при наявності робочого органу в зоні їх обслуговування, робочий орган обладнаний датчиком маси і датчиком рівня з можливістю вмикання після завантаження за інформацією від датчика маси чи датчика рівня (чи обох датчиків), робочий орган введений в систему з можливістю забезпечення пересування різними технологічними маршрутами та різними способами руху При проведенні патентного пошуку заявником виявлено технічне рішення [А С СРСР №1782809], яке містить найбільшу КІЛЬКІСТЬ суттєвих ознак спільних з заявленою системою /кузов, в верхній частині якого розміщений в можливістю переміщення по ньому, і навантажувальнорозвантажувальний пост, система укомплектована переставною ділянкою, виконаною у вигляді телескопічної штанги з рельсовим шляхом, що має на кінцях стержні-фіксатори, а КІНЦІ рельсів транспортного засобу і навантажувальнорозвантажувальний пост, система укомплектована переставною ділянкою, виконаною у вигляді телескопічної штанги з рельсовим шляхом, що має на кінцях стержні-фіксатори, а КІНЦІ рельсів транспортного засобу і навантажувальнорозвантажувального поста виконані з отворами для розміщення в них стержнів-фіксаторів/ Однак наявність зазначених, спільних з прототипом ознак, недостатня для отримання технічного результату, який забезпечує заявлена система автоматизованого керування робочим органом транспортної мережі Технічних рішень, які б за сукупністю ознак співпадали з заявленою - не виявлено Це дозволяє зробити висновок про ВІДПОВІДНІСТЬ заявленого технічного рішення критерію "новизна" В патентній і науково-технічній літературі не знайдено технічних рішень, в яких були б описані ВІДОМОСТІ про ознаки, що відрізняють заявлену систему автоматизованого керування робочим органом транспортної мережі від прототипу і забезпечують досягнення технічного результату в робочому органі встановлення блок пам'яті, забезпечений ВІДПОВІДНИМИ командами від блоку зв'язку з'єднаного з пультом керування системою, укомплектований мікропроцесором, блок пам'яті через блок зв'язку з'єднаний з пультом керування системою, з блоком виводу інформації, розвантажувальні перекидачі встановлені біля верстатів, обладнані блоками вмикання при наявності робочого органу в зоні їх обслуговування, робочий орган обладнаний датчиком маси і датчиком рівня з можливістю вимикання після завантаження за інформацією від датчика маси чи датчика рівня (чи обох датчиків), робочий орган введений в систему з можливістю забезпечення пересування різними технологічними маршрутами та різними способами руху Отже заявлене технічне рішення не впливає явним чином з рівня техніки, що дозволяє зробити висновок про його ВІДПОВІДНІСТЬ критерію "винахідницький рівень" Винахід стосується різних галузей народного господарства, які використовують транспортні засоби, застосовують робочі органи транспортних систем для транспортування готових виробів, деталей, напівфабрикатів, сировини Система може бути використана для автоматизації транспортних і завантажувальних операцій, заміни ручної праці механізованою і автоматизованою Тому заявлена система відповідає критерію винаходу "промислова придатність" Таким чином, заявлене технічне рішення є новим, промислово придатним, має винахідницький рівень, тобто відповідає всім умовам патентоспроможності винаходу ВІДПОВІДНО до статті 7 розділу II Закону України "Про охорону прав на винаходи і корисні моделі № 1771-111 Система автоматизованого керування робочим органом транспортної мережі представлена на фіг 1 - блок-система керування робочим органом транспортної мережі з пультом керування, фіг 2 - блок-схема розвантажувального перекидача, фіг 3 - лінійне розміщення транспортної мереж, фіг 4 - замкнуте розміщення транспортної мережі, фіг 5 - гілкове розміщення транспортної мережі, де 1 - робочий орган транспортної мережі, 2 блок пам'яті робочого органу, 3 - пульт керування системою, 4 - програмований мікропроцесор пульта керування, 5 - розвантажувальний перекидач, 6 завантажувальний пристрій, 7 - знімальний пристрій, 8 - привід знімального пристрою, 9 - розмикаючий пристрій перекидача, 10 - привід розмикаючого пристрою, 11 - датчик маси, 12 - датчик рівня, 13 - блок зв'язку, 14 блок вмикання розвантажувальних перекидачів, 15 - зона обслуговування 48520 розвантажувальних перекидачів, 16 - блок виводу інформації, 17-транспортний шлях Система автоматизованого керування робочим органом транспортної мережі /фиг 1 / складається з робочого органу транспортної мережі 1, блоку пам'яті робочого органу 2, пульта керування системою 3, програмованого мікропроцесора пульта керування 4, розвантажувальних перекидачів 5 /фіг 2/, встановлених біля верстатів або технологічних ЛІНІЙ, завантаження яких проводиться з завантажувальних пристроїв 6 /фіг 3 фіг 5/ продукцією /готовими виробами, напівфабрикатами, чи сировиною/ На фіг 3 фіг 5 зображено робочий орган і навантажувльнорозвантажувальні пости Розвантажувальні перекидачі 5 обладнані знімальним пристроєм 7 з його 8 з рухом в прямому напрямку до робочого органу та розмикаючого пристрою перекидача 9 з приводом 10 з рухом у поперечному напрямку на розмикання фіксуючого пристрою робочого органу/подана нами заявка на "Робочий орган транспортної системи" №2000116695 від 27 11 2000р , рішення про видачу деклараційного патенту на винахід прийнято 16 08 2001 р/ На робочому органі встановлені датчик маси 11, датчик рівня 12 та блок зв'язку 13 з пультом керування 3 оператора Біля розвантажувальних перекидачів 5 встановлені блоки вмикання 14 розвантажувальних перекидачів при наявності в зоні їх обслуговування 15 розвантажувальних перекидачів робочого органу 1 Пульт керування 3 обладнаний блоком виводу інформації 16 Транспортний шлях 17 з навантажувальнорозвантажувальними постами може виконуватись декількома способами Наприклад, лінійне розміщення розвантажувальних перекидачів 5 та завантажувальних пристроїв 6 з рухом робочого органу 1 в прямому і зворотному напрямках /фіг 3/, замкнуте розміщення розвантажувальних перекидачів 5 і завантажувальних пристроїв 6 з рухом по замкнутій траєкторії /фіг 4/, плкоподібне розміщення розвантажувальних перекидачів 5 та завантажувальних пристроїв 6 з рухом в прямому і зворотному напрямках по гілках /фіг 5/ Система автоматизованого керування робочим органом транспортної мережі працює наступним чином Оператор на мікропроцесорі пульта керування 4 задає програму руху робочого органу 1, згідно прийнятого технологічного процесу транспортування готових виробів, напівфабрикатів чи сиро вини Через блок зв'язку 13 робочого органу 1 з пультом керування 3 програма записується в блок пам'яті 2 робочого органу 1 При завантаженні робочого органу 1, про що надходить інформація від датчика маси 11 чи датчика рівня 12, робочий орган 1 вмикається і рухається згідно встановленої програми, записаної в блоці пам'яті 2 робочого органу І Система спроектована таким чином, що може отримувати інформацію від датчика маси 11 або від датчика рівня 12, або від обох датчиків разом у випадку наявності достатньої КІЛЬКОСТІ статистичних матеріалів про вантаж, який перевозиться В першу чергу це стосується рідких чи пастоподібних речовин, де встановлена адекватна залежність між їх рівнем і масою Розвантажувальний перекидач 5 підходить в зону обслуговування 15 і, згідно з програмою за командами блоку вмикання 14 розвантажувальних перекидачів, приводиться в дію розвантажувальний перекидач 5 При цьому до робочого органу 1, а саме до фіксуючого пристрою /подана нами заявка №2000116695 на "Робочий орган транспортної системи" від 27 11 2000р , рішення про видачу патенту прийнято 16 08 2001 р/, підводиться приводом 8 знімальний пристрій 7 під ємність чи платформу та проводиться розвантажування після розвантажування ємність чи платформу розвантажувальний перекидач 5 встановлює у ВИХІДНІ положення Далі робочий орган 1 рухається згідно з програмою на завантаження до завантажувальних пристроїв 6 розміщених згідно з прийнятим способом руху робочого органу 1 Процес транспортування продовжується В ручному режимі всі команди на рух, зупинку виконує оператор, керуючись інформацією від датчика маси 1 1 , датчика рівня 12 і блоку виводу інформації 16 В КІНЦІ зміни з блоку пам'яті 2 робочого органу 1 через блок зв'язку 13 з пультом керування системою 3 виводиться інформація на блок виводу інформації 16 (принтер) про КІЛЬКІСТЬ перевезень, пункти перевезень, а також КІЛЬКІСТЬ І ВИД перевезених вантажів Запропонована система автоматизованого керування робочим органом транспортної мережі сприяє створенню систем автоматизації і роботизації технологічних процесів, сприяє створенню безперервних технологій виробництва, забезпечує обліку КІЛЬКОСТІ перевезень, маршрутів перевезень, перевезених вантажів за КІЛЬКІСТЮ І асортиментом 48520 11 її _ 2 ^ -—С Гп -а СП ФІГ.1 7 / І 5 Г7 a \ 6 ФігЗ Фіг.4 1. ФІГ 5 5 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomatic control system for transport net working body
Автори англійськоюOschypok Ihor Mykolaiovych, Zanichkovs'ka Liubov Volodymyrivna
Назва патенту російськоюСистема автоматизированного управления рабочим органом транспортной сети
Автори російськоюОщипок Игорь Николаевич, Заничковская Любовь Владимировна
МПК / Мітки
МПК: B60W 10/00
Мітки: мережі, система, автоматизованого, органом, робочим, керування, транспортної
Код посилання
<a href="https://ua.patents.su/4-48520-sistema-avtomatizovanogo-keruvannya-robochim-organom-transportno-merezhi.html" target="_blank" rel="follow" title="База патентів України">Система автоматизованого керування робочим органом транспортної мережі</a>
Система керування стрілоподібним виконавчим органом
Номер патенту: 37500
Опубліковано: 15.05.2001
Автори: Трубчанін Віктор Іванович, Колсно Анатолій Прокопович, Данилов Володимир Миколайович, Трубчанін Володимир Вікторович, Антипов Віктор Тимофійович
МПК: E21C 27/24
Мітки: органом, керування, виконавчим, стрілоподібним, система
Формула / Реферат:
Система керування стрілоподібним виконавчим органом прохідницького комбайна, що містить гідроциліндри телескопа, повороту і підйому-опускання виконавчого органа, закріпленого на корпусі, напірні та зливні магістралі, помпи, гідроблок керування гідроциліндрами телескопа, гідроблок керування гідроциліндрами повороту і підйому-опускання, силовий гідроблок з розподільниками для забезпечення роботи гідроциліндрів телескопа, повороту і...
Пристрій для керування робочим органом прохідницького щита
Номер патенту: 9366
Опубліковано: 30.09.1996
Автори: Сєров Євген Семенович, Яроцький Микола Іванович, Мельников Іван Йосипович, Ліндаєв Володимир Вікторович, Фішман Йосип Давидович, Швиченко Олександр Володимирович, Гарькавий Володимир Андрійович
МПК: E21C 35/24, E21D 9/06
Мітки: пристрій, керування, прохідницького, органом, щита, робочим
Формула / Реферат:
Устройство для управления рабочим органом проходческой машины, содержащеедва насоса, напорные магистрали с предохранительными и обратными клапанами, два блока соединенных последовательно гидрораспределителей управления гидроцилиндрами рабочего органа и дополнительный пятилинейный гидрораспределитель, один вход которого соединен с напорной магистралью одного из насосов, напорный золотник, обратные клапаны, сливную магистраль, отличающееся...
Система автоматичного керування регулюючим органом гідромашини
Номер патенту: 15516
Опубліковано: 30.06.1997
Автори: Пожидаєв Віталій Іванович, Шилов Валерій Павлович, Ушомирський Боріс Аронович
МПК: F03B 15/00, F15B 1/00
Мітки: гідромашини, система, органом, керування, регулюючим, автоматичного
Формула / Реферат:
(57) Система автоматического управления регулирующим органом гидромашины, содержащая аккумулятор давления, гидравлический поршневой сервомотор с полостями давления и слива, соединенный с ним командоаппарат, главный золотник, подключенный к аккумулятору давления, и золотник, установленный между главным золотником и сервомотором, и соединяющий в одной из позиций полости последнего между собой и с аккумулятором давления по сигналу...
Система автоматичного керування виконавчим органом прохідницького комбайну виборчої дії
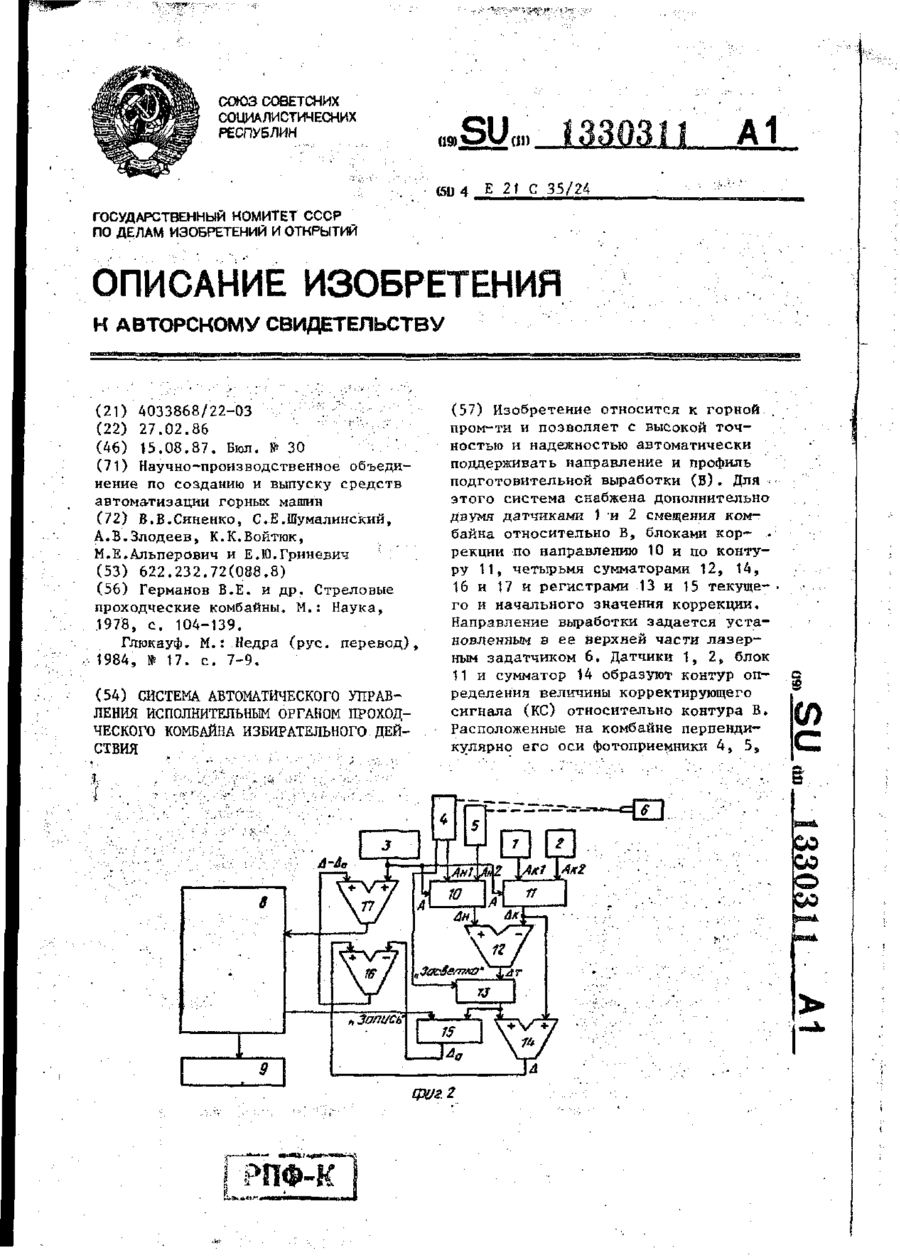
Номер патенту: 7626
Опубліковано: 26.12.1995
Автори: Войтюк Клим Кириллович, Злодєєв Олександр Васильович, Грінєвіч Євген Юрьєвич, Шумалінський Семен Овсійович, Сіненко Віктор Васильович, Альперовіч Михайло Євгенович
МПК: E21C 35/24
Мітки: органом, керування, автоматичного, система, виконавчим, дії, прохідницького, виборчої, комбайну
Формула / Реферат:
Система автоматического управления исполнительным органом проходческого комбайна избирательного действия, содержащая блок программного управления, блок исполнительных механизмов, датчик горизонтального положения исполнительного органа и задатчик направления лазерный, оптически связанный с двумя фотоприемниками, расположенными на комбайне один за другим перпендикулярно его продольной оси, отличающаяся тем, что, с целью повышения скорости...
Система автоматизованого керування насосними агрегатами
Номер патенту: 45366
Опубліковано: 15.04.2002
Автори: СТЕЦКО МИХАЙЛО ГРИГОРОВИЧ, Шовкопляс Іван Петрович
МПК: G05D 9/00, F04D 15/00
Мітки: насосними, агрегатами, автоматизованого, керування, система
Формула / Реферат:
Система автоматизованого керування насосними агрегатами, яка складається з підключених до випрямлячів змінної напруги сигналів первинних перетворювачів рівня, підсилювачів постійного струму, входами з'єднаних з виходами випрямлячів змінної напруги сигналів, пристрою керування, входи якого з'єднані з виходами підсилювачів постійного струму, один з яких - для захисту від "сухого ходу", а також трансформаторів струму через схему...
Попередній патент: Спосіб оцінки функціонального стану слизової оболонки порожнини рота
Наступний патент: Пазонний спосіб моделювання нейрона та пристрій для його здійснення
Випадковий патент: Виробничі бази, способи і пристрій для обробки насіння