Вантажоприймальний пристрій електронних вагів
Номер патенту: 51502
Опубліковано: 15.11.2002
Автори: Сацюк Валерій Іванович, Раздобаров Віктор Георгійович, Архіпов Олександр Миколайович, Лопатьєв Микола Іванович, Чаков Олександр Миколайович, Сімененко Олег Володимирович, Лісовий Віталій Васильович

Формула / Реферат
Вантажоприймальний пристрій електронних вагів, що містить корпус, розміщений в корпусі силовимірювальний датчик, вузол силовведення з силоввідним елементом, що опирається на силовимірювальний датчик, мембрану, з'єднану з вузлом силовведення, який відрізняється тим, що корпус містить вертикальні напрямні, в яких встановлені повзуни, мембрана жорстко з'єднана з повзунами за допомогою пазів в повзунах і притисків з шипами, а в напрямних повзуни зафіксовані болтами через овальні отвори в них.
Текст
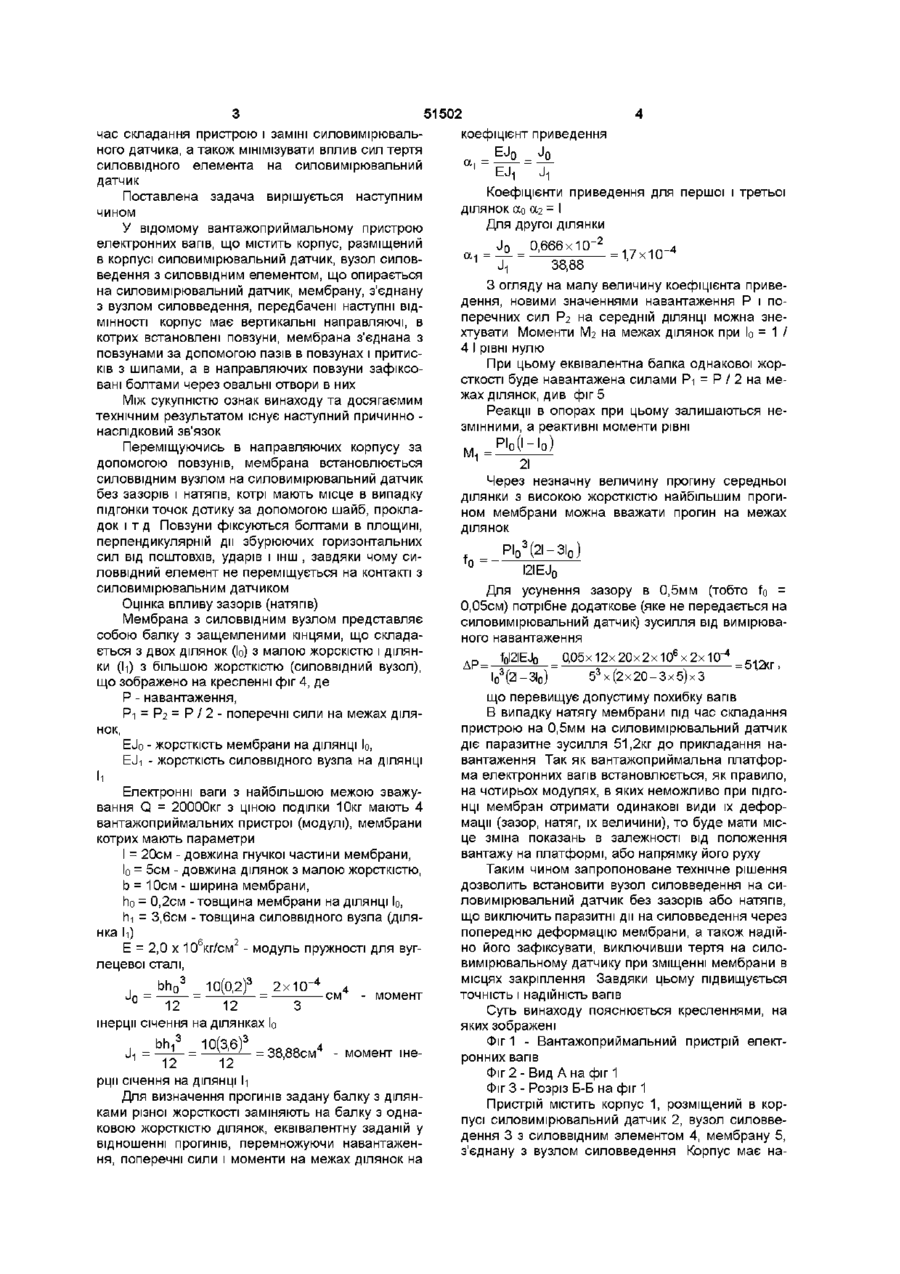
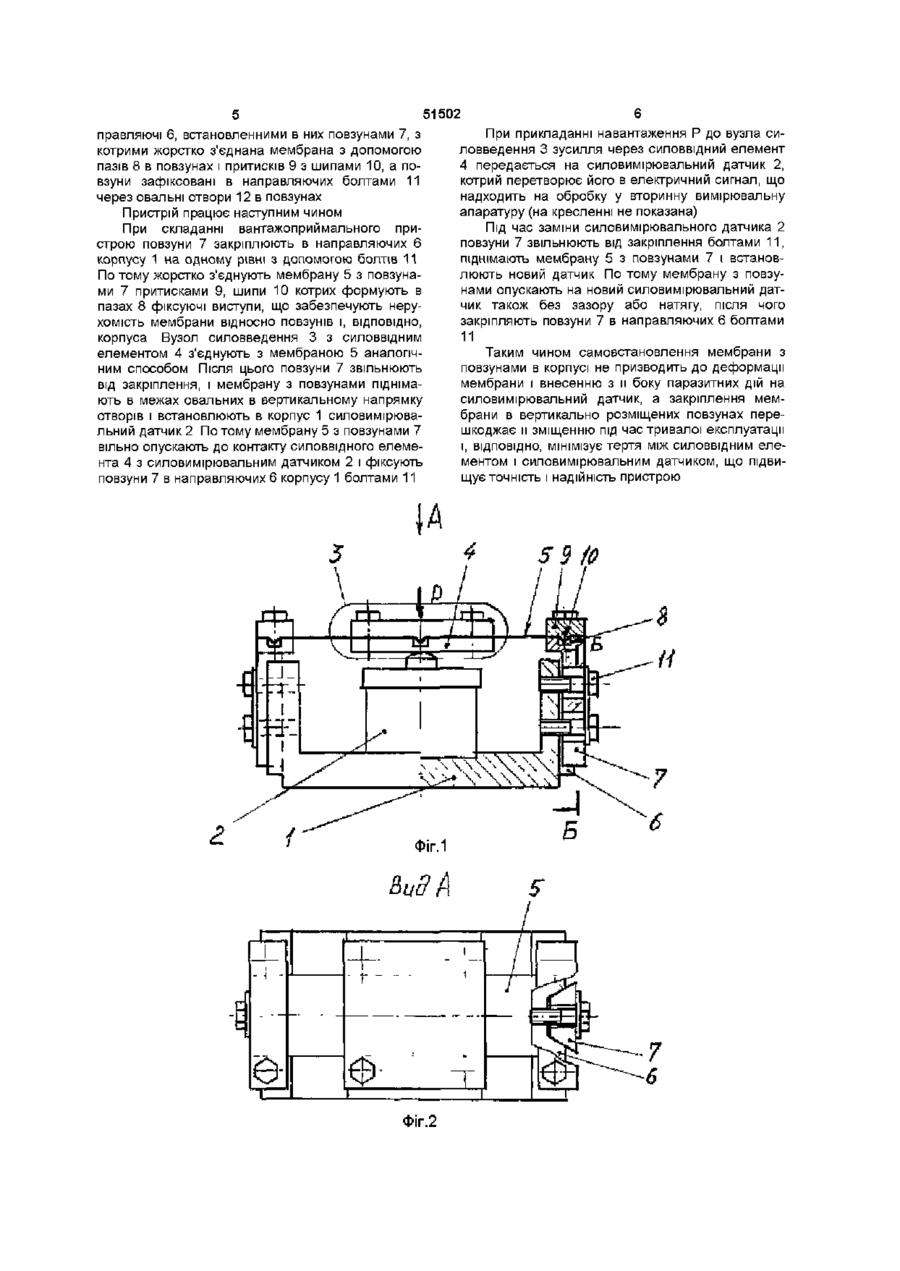
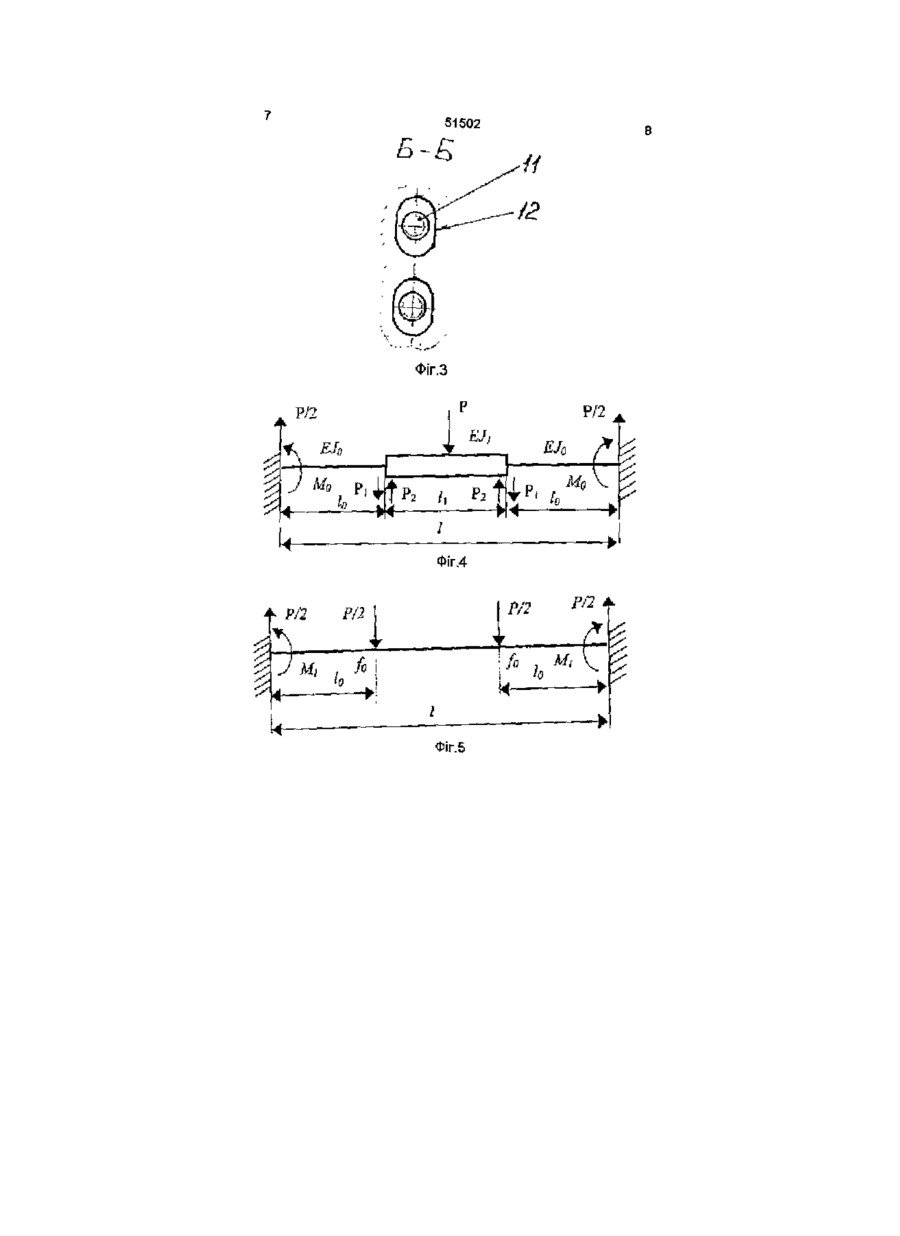
Вантажоприймальний пристрій електронних вапв, що містить корпус, розміщений в корпусі силовимірювальний датчик, вузол силовведення з силоввідним елементом, що опирається на силовимірювальний датчик, мембрану, з'єднану з вузлом силовведення, який відрізняється тим, що корпус містить вертикальні напрямні, в яких встановлені повзуни, мембрана жорстко з'єднана з повзунами за допомогою пазів в повзунах і притисків з шипами, а в напрямних повзуни зафіксовані болтами через овальні отвори в них Винахід стосується ваговимірювальної техніки і може бути використаний для зважування прокату транспортованого в технологічних потоках, залізничних вагонів в русі і в інших системах, підданих впливу горизонтально спрямованих сил Відомий "Пристрій для зважування рухомих залізничних составів", патент України №13900 "А" кл G 01 G 19/04, бюлетень № 2, 25 04 97 , що має силовимірювальні вузли (модулі), до складу яких входять корпус, розміщений в ньому силовимірювальний датчик, жорстко закріплену в верхній частині корпусу мембрану з жорстко закріпленими на ній підп'ятниками, контактуючими з силовимірювальними датчиками Недоліком цього пристрою є можливий зазор (або натяг) між підп'ятником мембрани і силовимірювальним датчиком Для їх усунення потрібна старанна підгонка точок дотику датчика з підп'ятником і мембрани з корпусом, розміщених в різних площинах, з допомогою прокладок, шайб і т п , що викликає значні труднощі під час збирання силовимірювального вузла і, особливо, при заміні силовимірювального датчика Вказаний зазор або натяг викликають невраховувану деформацію мембрани, що вносить зміни в передачу зусиль і, ВІДПОВІДНО, В ТОЧНІСТЬ вимірювання зусиль Найбільш близьким по технічній суті є "Вантажоприймальний пристрій вапв", патент України №25303 "А", кп G 01 G 19/04, бюллетень №6 від 25 12 98 , до складу якого входить корпус, розташований в корпусі силовимірювальний датчик, вузол силовведення з силоввідним елементом, що опирається на силовимірювальний датчик, мембрану з'єднану з вузлом силовведення Недоліками такого пристрою є 1 Необхідність настройки пристрою за допомогою шайб, прокладок і т п , що може привести до утворення зазору (натягу) між силоввідним елементом та силовимірювальним датчиком і, ВІДПОВІДНО, до деформації мембрани, яка чинить паразитні дії на силовимірювальний датчик, що призводить до спотворення силовведення та додаткової похибки вимірювання 2 Закріплення (притиск) мембрани до силоввідного вузла (квадратної плити) і корпусу за допомогою шайб і болтів у горизонтальній площині, тобто в площині дії збурюючих горизонтальних зусиль, яке під їх дією послаблюється, через що збільшується зміщення силоввідного вузлата його тертя об поверхню силовимірювального елемента силовимірювального датчика, що також спотворює силовведення і, ВІДПОВІДНО, знижує точність вимірювання 3 Складність заміни силовимірювального датчика, пов'язану з необхідністю демонтажу силоввідного вузла і мембрани з подальшою підгонкою точок дотику за допомогою шайб В основу винаходу поставлена задача вдосконалення вантажоприймального пристрою електронних вапв шляхом введення сукупності нових конструктивних елементів у взаємозв'язку, котрі дозволяють усунути паразитні дії, що спотворюють силовведення, через деформацію мембрани під о ю ю 51502 час складання пристрою і заміні силовимірювального датчика, а також мінімізувати вплив сил тертя силоввідного елемента на силовимірювальний датчик Поставлена задача вирішується наступним чином У відомому вантажоприймальному пристрою електронних вапв, що містить корпус, разміщений в корпусі силовимірювальний датчик, вузол силовведення з силоввідним елементом, що опирається на силовимірювальний датчик, мембрану, з'єднану з вузлом силовведення, передбачені наступні ВІДМІННОСТІ корпус має вертикальні направляючі, в котрих встановлені повзуни, мембрана з'єднана з повзунами за допомогою пазів в повзунах і притисків з шипами, а в направляючих повзуни зафіксовані болтами через овальні отвори в них Між сукупністю ознак винаходу та досягаємим технічним результатом існує наступний причинно наслідковий зв'язок Переміщуючись в направляючих корпусу за допомогою повзунів, мембрана встановлюється силоввідним вузлом на силовимірювальний датчик без зазорів і натягів, котрі мають місце в випадку підгонки точок дотику за допомогою шайб, прокладок і т д Повзуни фіксуються болтами в площині, перпендикулярній дії збурюючих горизонтальних сил від поштовхів, ударів і інш , завдяки чому силоввідний елемент не переміщується на контакті з силовимірювальним датчиком Оцінка впливу зазорів (натягів) Мембрана з силоввідним вузлом представляє собою балку з защемленими кінцями, що складається з двох ділянок (Іо) з малою жорскістю і ділянки (h) з більшою жорсткістю (силоввідний вузол), що зображено на кресленні фіг 4, де Р - навантаження, Рі = Рг = Р / 2 - поперечні сили на межах ділянок, EJo - жорсткість мембрани на ДІЛЯНЦІ ІО, E J I - жорсткість силоввідного вузла на ДІЛЯНЦІ її Електронні ваги з найбільшою межою зважування Q = 20000кг з ціною поділки 10кг мають 4 вантажоприймальних пристрої (модулі), мембрани котрих мають параметри І = 20см - довжина гнучкої частини мембрани, Іо = 5см - довжина ділянок з малою жорсткістю, b = 10см - ширина мембрани, ho = 0,2см - товщина мембрани на ДІЛЯНЦІ ІО, hi = 3,6см -товщина силоввідного вузла (ділянка h) Е = 2,0 х 106кг/см2 - модуль пружності для вуглецевої сталі, _ b h 0 3 _ 10(0,2)3 _ 2x10 -4 Jn = CM - момент 12 12 інерції січення на ділянках bh 10 3,6 = 38,88см - момент іне12 12 рцм січення на ДІЛЯНЦІ h Для визначення прогинів задану балку з ділянками різної жорсткості заміняють на балку з однаковою жорсткістю ділянок, еквівалентну заданій у відношенні прогинів, перемножуючи навантаження, поперечні сили і моменти на межах ділянок на коефіцієнт приведення _ EJ 0 _ J o Коефіцієнти приведення для першої і третьої ДІЛЯНОК (Хо (Х2 = І Для другої ділянки Jo 0,666x10 -2 = 1,7x10 -4 38,88 З огляду на малу величину коефіцієнта приведення, новими значеннями навантаження Р і поперечних сил Рг на середній ДІЛЯНЦІ можна знехтувати Моменти Мг на межах ділянок при Іо = 1 / 4 І рівні нулю При цьому еквівалентна балка однакової жорсткості буде навантажена силами Рі = Р / 2 на межах ділянок, див фіг 5 Реакції в опорах при цьому залишаються незмінними, а реактивні моменти рівні 1 21 Через незначну величину прогину середньої ділянки з високою жорсткістю найбільшим прогином мембрани можна вважати прогин на межах ділянок •о'(2І-ЗІІ l2IEJn Для усунення зазору в 0,5мм (тобто fo = 0,05см) потрібне додаткове (яке не передається на силовимірювальний датчик) зусилля від вимірюваного навантаження f0i2EJ0 о о б х і г х г о х г х ю ^ г х Ю " 4 _,_ AD fn= Д г — —= -— х— — О\ЖГ і Іо (2-ЗІ0) 5 3 х(2х20-Зх5)хЗ що перевищує допустиму похибку вапв В випадку натягу мембрани під час складання пристрою на 0,5мм на силовимірювальний датчик діє паразитне зусилля 51,2кг до прикладання навантаження Так як вантажоприймальна платформа електронних вапв встановлюється, як правило, на чотирьох модулях, в яких неможливо при ПІДГОНЦІ мембран отримати одинакові види їх деформації (зазор, натяг, їх величини), то буде мати місце зміна показань в залежності від положення вантажу на платформі, або напрямку його руху Таким чином запропоноване технічне рішення дозволить встановити вузол силовведення на силовимірювальний датчик без зазорів або натягів, що виключить паразитні дії на силовведення через попередню деформацію мембрани, а також надійно його зафіксувати, виключивши тертя на силовимірювальному датчику при зміщенні мембрани в місцях закріплення Завдяки цьому підвищується точність і надійність вапв Суть винаходу пояснюється кресленнями, на яких зображені Фіг 1 - Вантажоприймальний пристрій електронних вапв Фіг 2 - Вид А на фіг 1 Фіг 3 - Розріз Б-Б на фіг 1 Пристрій містить корпус 1, розміщений в корпусі силовимірювальний датчик 2, вузол силовведення 3 з силоввідним элементом 4, мембрану 5, з'єднану з вузлом силовведення Корпус має на 51502 При прикладанні навантаження Р до вузла силовведення 3 зусилля через силоввідний елемент 4 передається на силовимірювальний датчик 2, котрий перетворює його в електричний сигнал, що надходить на обробку у вторинну вимірювальну апаратуру (на кресленні не показана) Під час заміни силовимірювального датчика 2 повзуни 7 звільнюють від закріплення болтами 11, піднімають мембрану 5 з повзунами 7 і встановлюють новий датчик По тому мембрану з повзунами опускають на новий силовимірювальний датчик також без зазору або натягу, після чого закріпляють повзуни 7 в направляючих 6 болтами 11 Таким чином самовстановлення мембрани з повзунами в корпусі не призводить до деформації мембрани і внесенню з и боку паразитних дій на силовимірювальний датчик, а закріплення мембрани в вертикально розміщених повзунах перешкоджає и зміщенню під час тривалої експлуатації і, ВІДПОВІДНО, мінімізує тертя між силоввідним елементом і силовимірювальним датчиком, що підвищує точність і надійність пристрою правляючі 6, встановленними в них повзунами 7, з котрими жорстко з'єднана мембрана з допомогою пазів 8 в повзунах і притисків 9 з шипами 10, а повзуни зафіксовані в направляючих болтами 11 через овальні отвори 12 в повзунах Пристрій працює наступним чином При складанні вантажоприймального пристрою повзуни 7 закріплюють в направляючих 6 корпусу 1 на одному рівні з допомогою болтів 11 По тому жорстко з'єднують мембрану 5 з повзунами 7 притисками 9, шипи 10 котрих формують в пазах 8 фіксуючі виступи, що забезпечують нерухомість мембрани відносно повзунів і, ВІДПОВІДНО, корпуса Вузол силовведення 3 з силоввідним елементом 4 з'єднують з мембраною 5 аналогічним способом Після ЦЬОГО повзуни 7 звільнюють від закріплення, і мембрану з повзунами піднімають в межах овальних в вертикальному напрямку отворів і встановлюють в корпус 1 силовимірювальний датчик 2 По тому мембрану 5 з повзунами 7 вільно опускають до контакту силоввідного елемента 4 з силовимірювальним датчиком 2 і фіксують повзуни 7 в направляючих 6 корпусу 1 болтами 11 5 9 ІО ФІГ.1 Buff - н Фіг.2 A Фіг.З P/2 P/2 KJ, Фіг.4 Фіг.5
ДивитисяДодаткова інформація
Назва патенту англійськоюLoad-receiving device of an electronic weigher
Автори англійськоюSimenenko Oleh Volodymyrovych, Lisovyi Vitalii Vasyliovych, Razdobarov Viktor Heorhiyovych, Satsiuk Valeriy Ivanovych, Arkhipov Oleksandr Mykolaiovych, Chakov Oleksandr Mykolayovych
Назва патенту російськоюГрузоприемное устройство электронных весов
Автори російськоюСимененко Олег Владимирович, Лисовый Виталий Васильевич, Раздобаров Виктор Георгиевич, Сацюк Валерий Иванович, Архипов Александр Николаевич, Чаков Александр Николаевич
МПК / Мітки
МПК: G01G 19/02, G01G 19/00
Мітки: пристрій, електронних, вантажоприймальний, вагів
Код посилання
<a href="https://ua.patents.su/4-51502-vantazhoprijjmalnijj-pristrijj-elektronnikh-vagiv.html" target="_blank" rel="follow" title="База патентів України">Вантажоприймальний пристрій електронних вагів</a>
Вантажоприймальний пристрій вагів

Номер патенту: 29147
Опубліковано: 16.10.2000
Автори: Калінін Олександр Іванович, Дмитрієв Едуард Модестович
МПК: G01G 19/02
Мітки: вагів, пристрій, вантажоприймальний
Формула / Реферат:
Вантажоприймальний пристрій вагів, який містить вантажоприймальну платформу, розміщений у ній, нерухомо встановлений на фундаменті силовимірювальний датчик, вузол силовведення, який відрізняється тим, що вузол силовведення виконаний у вигляді траверси з вертикально розташованими тягами, при цьому вантажоприймальна платформа через плиту, жорстко закріплену до нижньої частини шарнірне з'єднана за допомого, тяг з траверсою, яка контактує з...
Вантажоприймальний пристрій вагів
Номер патенту: 25303
Опубліковано: 30.10.1998
Автор: Сухінін Віктор Олександрович
МПК: G01G 19/04
Мітки: вантажоприймальний, вагів, пристрій
Формула / Реферат:
Грузоприемное устройство весов, содержащее корпус, размещенный в корпусе силоизмерительный датчик, жестко закрепленную в корпусе мембрану, узел силовведения с силовводящим элементом, опирающимся на силоизмерительный элемент силоизмерительного датчика, отличающееся тем, что узел силовведения снабжен квадратной плитой, жестко через шайбы закрепленной по углам к мембране, выполненной в форме квадрата с квадратным отверстием в центре, причем...
Вантажоприймальний пристрій залізничних вагів
Номер патенту: 41601
Опубліковано: 17.09.2001
Автори: Нікітінський Михайло Павлович, Капітельман Леонід Вільямович
МПК: G01G 19/04
Мітки: вантажоприймальний, залізничних, вагів, пристрій
Формула / Реферат:
1. Вантажоприймальний пристрій залізничних ваг, який містить рейку, введений у вертикальну стінку рейки і закріплений на ній силовимірювальний вузол з силовимірювальним елементом і закріпленими на ньому тензорезисторами, які скомутовані у електричну схему, який відрізняється тим, що силовимірювальний вузол виконаний у вигляді пружного розрізного корпуса, зовнішня циліндрична поверхня якого розташована перпендикулярно вертикальній осі...
Вантажоприймальний пристрій вагів
Номер патенту: 23045
Опубліковано: 30.06.1998
Автори: Медведенко Микола Федорович, Годзіковський Василь Олександрович
МПК: G01G 19/02
Мітки: пристрій, вагів, вантажоприймальний
Формула / Реферат:
1. Грузоприемное устройство весов, содержащее платформу, связанную с центрирующими ее четырьмя консольными датчиками силы, каждый из которых содержит силовой передающий элемент, размещенный в цилиндрическом углублении деформируемой части консольного датчика силы, и ограничители горизонтальных перемещений платформы, отличающееся тем, что силовой передающий элемент выполнен в виде стержня с опорным фланцем и размещен в отверстии, выполненном в...
Повітрозабірний пристрій вагон-вагів доменної печі
Номер патенту: 14426
Опубліковано: 25.04.1997
Автор: Нємцов Микола Степанович
МПК: C21B 7/00
Мітки: пристрій, печі, вагон-вагів, доменної, повітрозабірний
Формула / Реферат:
Воздухозаборное устройство вагон-весов доменной печи, содержащее приточный патрубок, корпус с пылеотделителем, выхлопной трубопровод, отличающееся тем, что, с целью облегчения очистки пылеотделителя и выполнения ее при работе вагон-весов, корпус снабжен двумя осями, жестко закрепленными на его боковых стенках выше пылеотделителя, при этом одна ось сплошная, а другая - пустотелая и сочленена с выхлопным трубопроводом, а обе оси...
Попередній патент: Спосіб виготовлення асфальтобетонних сумішей
Наступний патент: Спосіб діагностики насичення тканин киснем серед хворих на системну склеродермію
Випадковий патент: Спосіб хіміко-термічної обробки виробів