Анемометрична система
Номер патенту: 52444
Опубліковано: 25.08.2010
Автори: Тимченко Іна Вікторівна, Кукліна Катерина Олексіївна, Тимченко Віктор Леонідович
Формула / Реферат
Анемометрична система, що складається з блока контролю швидкості вітру, блока контролю напряму вітру, пульта керування, мікроконтролера, до складу якого входять блок усереднення кількості імпульсів та фільтрування випадкових коливань, блок перерахунку кількості імпульсів у швидкість потоку вітру, які з'єднані з вузлом контролю швидкості, аналогово-цифровий перетворювач входом з'єднаний з виходом блока контролю напрямку вітру, яка відрізняється тим, що у блоці контролю напрямку вітру використано шістнадцятирумбову систему, вихід якого з'єднаний через аналогово-цифровий перетворювач мікроконтролера з LCD-дисплеєм, блок контролю швидкості сполучений з блоком перерахунків кількості імпульсів в швидкість вітру, вихід якого з'єднаний з блоком усереднення параметрів швидкості вітру, вихід якого зв'язаний з блоком контролю швидкості вітру по заданому значенню та блоком аварійної сигналізації.
Текст
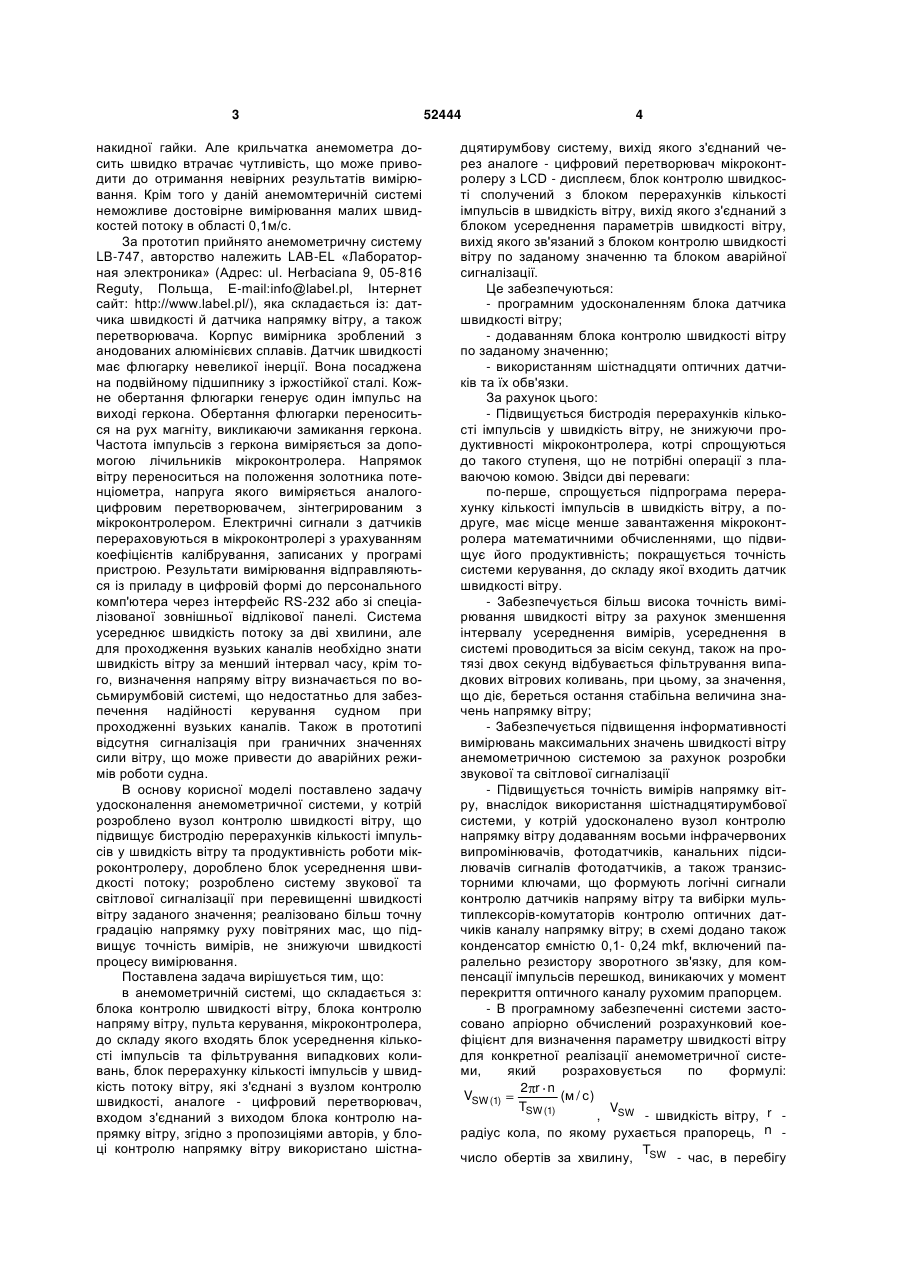
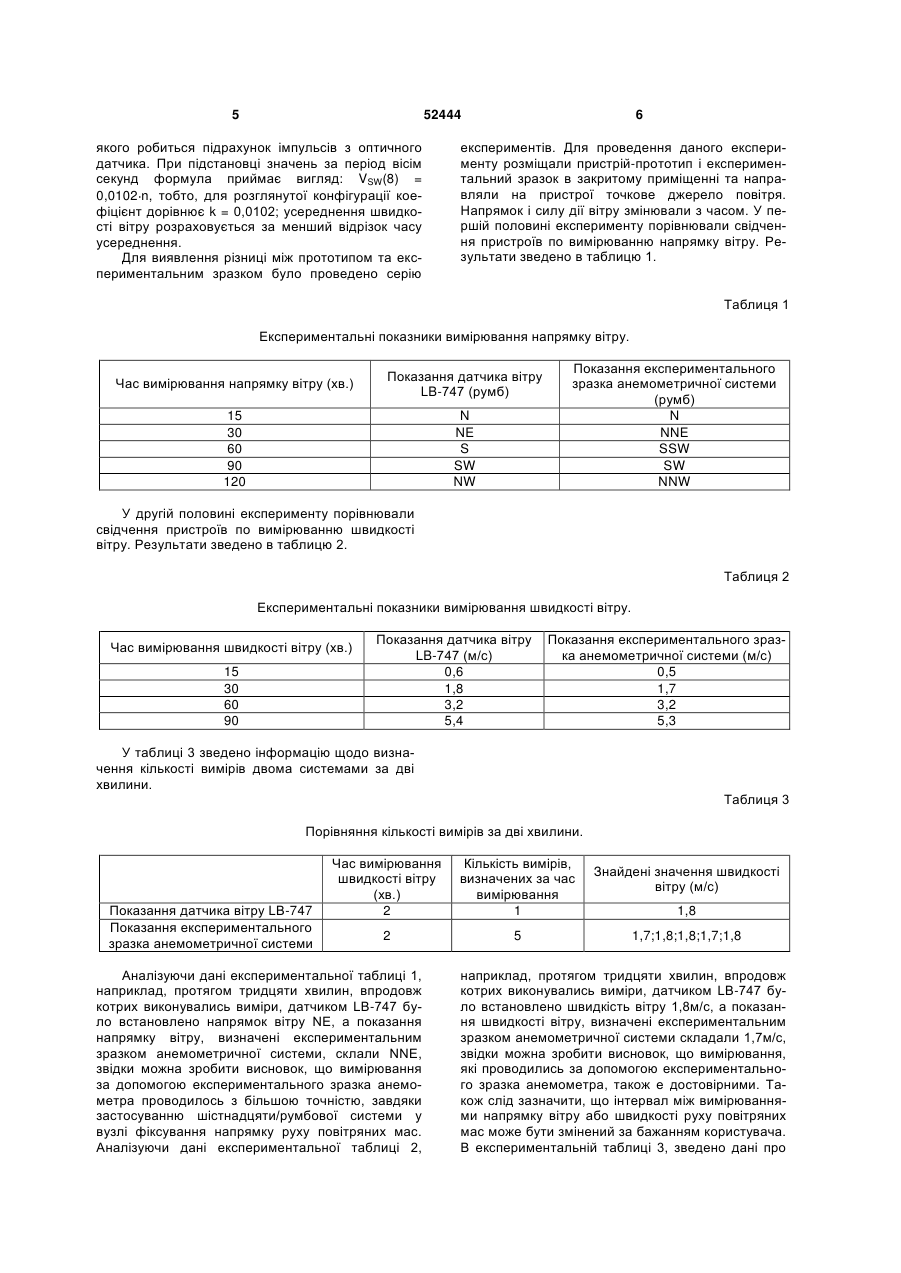
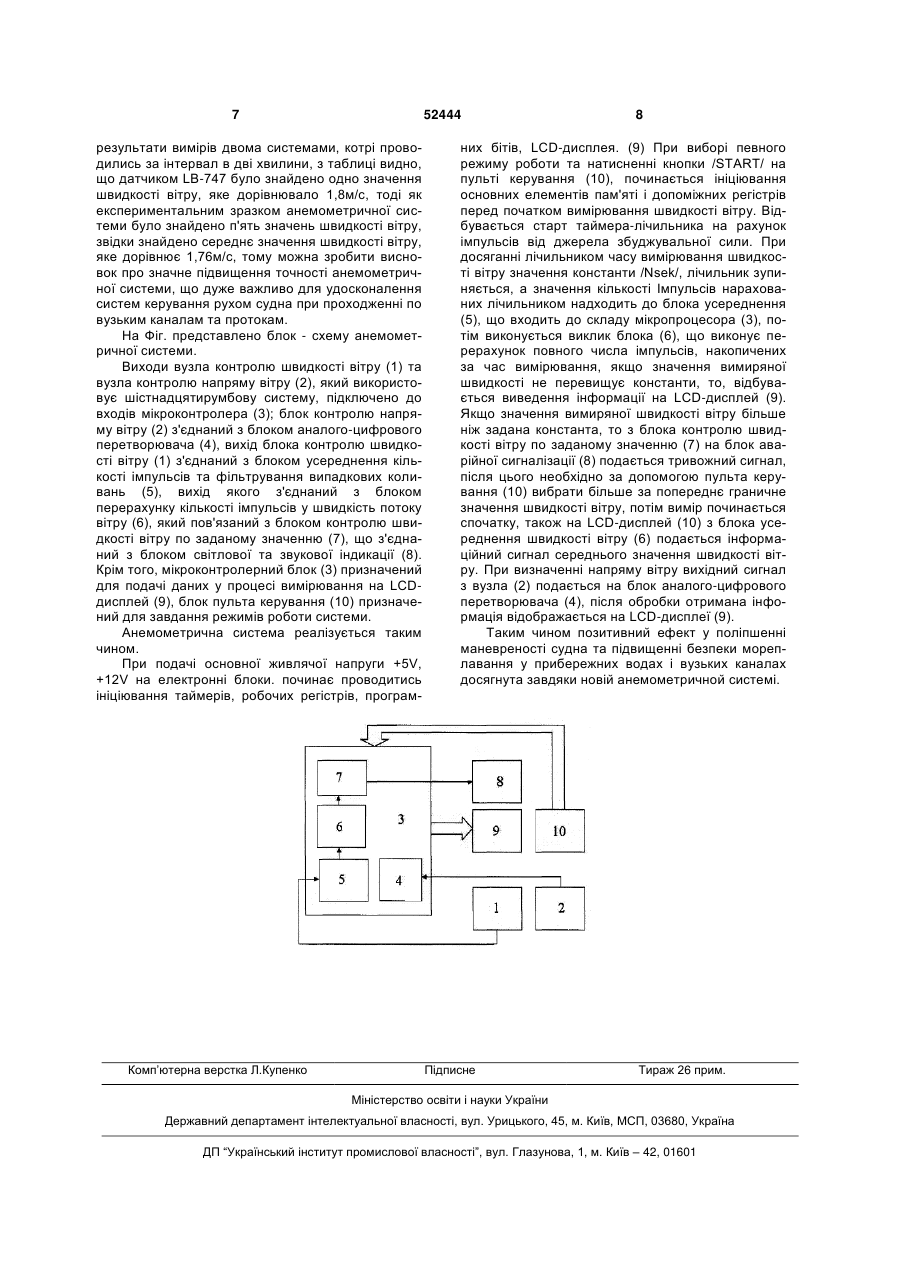
Анемометрична система, що складається з блока контролю швидкості вітру, блока контролю напряму вітру, пульта керування, мікроконтролера, до складу якого входять блок усереднення кількості імпульсів та фільтрування випадкових коливань, блок перерахунку кількості імпульсів у швид 3 накидної гайки. Але крильчатка анемометра досить швидко втрачає чутливість, що може приводити до отримання невірних результатів вимірювання. Крім того у даній анемомтеричній системі неможливе достовірне вимірювання малих швидкостей потоку в області 0,1м/с. За прототип прийнято анемометричну систему LB-747, авторство належить LAB-EL «Лабораторная электроника» (Адрес: ul. Herbaciana 9, 05-816 Reguty, Польща, E-mail:info@label.pl, Інтернет сайт: http://www.label.pl/), яка складається із: датчика швидкості й датчика напрямку вітру, а також перетворювача. Корпус вимірника зроблений з анодованих алюмінієвих сплавів. Датчик швидкості має флюгарку невеликої інерції. Вона посаджена на подвійному підшипнику з іржостійкої сталі. Кожне обертання флюгарки генерує один імпульс на виході геркона. Обертання флюгарки переноситься на рух магніту, викликаючи замикання геркона. Частота імпульсів з геркона виміряється за допомогою лічильників мікроконтролера. Напрямок вітру переноситься на положення золотника потенціометра, напруга якого виміряється аналогоцифровим перетворювачем, зінтегрированим з мікроконтролером. Електричні сигнали з датчиків перераховуються в мікроконтролері з урахуванням коефіцієнтів калібрування, записаних у програмі пристрою. Результати вимірювання відправляються із приладу в цифровій формі до персонального комп'ютера через інтерфейс RS-232 або зі спеціалізованої зовнішньої відлікової панелі. Система усереднює швидкість потоку за дві хвилини, але для проходження вузьких каналів необхідно знати швидкість вітру за менший інтервал часу, крім того, визначення напряму вітру визначається по восьмирумбовій системі, що недостатньо для забезпечення надійності керування судном при проходженні вузьких каналів. Також в прототипі відсутня сигналізація при граничних значеннях сили вітру, що може привести до аварійних режимів роботи судна. В основу корисної моделі поставлено задачу удосконалення анемометричної системи, у котрій розроблено вузол контролю швидкості вітру, що підвищує бистродію перерахунків кількості імпульсів у швидкість вітру та продуктивність роботи мікроконтролеру, дороблено блок усереднення швидкості потоку; розроблено систему звукової та світлової сигналізації при перевищенні швидкості вітру заданого значення; реалізовано більш точну градацію напрямку руху повітряних мас, що підвищує точність вимірів, не знижуючи швидкості процесу вимірювання. Поставлена задача вирішується тим, що: в анемометричній системі, що складається з: блока контролю швидкості вітру, блока контролю напряму вітру, пульта керування, мікроконтролера, до складу якого входять блок усереднення кількості імпульсів та фільтрування випадкових коливань, блок перерахунку кількості імпульсів у швидкість потоку вітру, які з'єднані з вузлом контролю швидкості, аналоге - цифровий перетворювач, входом з'єднаний з виходом блока контролю напрямку вітру, згідно з пропозиціями авторів, у блоці контролю напрямку вітру використано шістна 52444 4 дцятирумбову систему, вихід якого з'єднаний через аналоге - цифровий перетворювач мікроконтролеру з LCD - дисплеєм, блок контролю швидкості сполучений з блоком перерахунків кількості імпульсів в швидкість вітру, вихід якого з'єднаний з блоком усереднення параметрів швидкості вітру, вихід якого зв'язаний з блоком контролю швидкості вітру по заданому значенню та блоком аварійної сигналізації. Це забезпечуються: - програмним удосконаленням блока датчика швидкості вітру; - додаванням блока контролю швидкості вітру по заданому значенню; - використанням шістнадцяти оптичних датчиків та їх обв'язки. За рахунок цього: - Підвищується бистродія перерахунків кількості імпульсів у швидкість вітру, не знижуючи продуктивності мікроконтролера, котрі спрощуються до такого ступеня, що не потрібні операції з плаваючою комою. Звідси дві переваги: по-перше, спрощується підпрограма перерахунку кількості імпульсів в швидкість вітру, а подруге, має місце менше завантаження мікроконтролера математичними обчисленнями, що підвищує його продуктивність; покращується точність системи керування, до складу якої входить датчик швидкості вітру. - Забезпечується більш висока точність вимірювання швидкості вітру за рахунок зменшення інтервалу усереднення вимірів, усереднення в системі проводиться за вісім секунд, також на протязі двох секунд відбувається фільтрування випадкових вітрових коливань, при цьому, за значення, що діє, береться остання стабільна величина значень напрямку вітру; - Забезпечується підвищення інформативності вимірювань максимальних значень швидкості вітру анемометричною системою за рахунок розробки звукової та світлової сигналізації - Підвищується точність вимірів напрямку вітру, внаслідок використання шістнадцятирумбової системи, у котрій удосконалено вузол контролю напрямку вітру додаванням восьми інфрачервоних випромінювачів, фотодатчиків, канальних підсилювачів сигналів фотодатчиків, а також транзисторними ключами, що формують логічні сигнали контролю датчиків напряму вітру та вибірки мультиплексорів-комутаторів контролю оптичних датчиків каналу напрямку вітру; в схемі додано також конденсатор ємністю 0,1- 0,24 mkf, включений паралельно резистору зворотного зв'язку, для компенсації імпульсів перешкод, виникаючих у момент перекриття оптичного каналу рухомим прапорцем. - В програмному забезпеченні системи застосовано апріорно обчислений розрахунковий коефіцієнт для визначення параметру швидкості вітру для конкретної реалізації анемометричної системи, який розраховується по формулі: 2 r n VSW (1) (м / с ) TSW (1) V , SW - швидкість вітру, r радіус кола, по якому рухається прапорець, n T число обертів за хвилину, SW - час, в перебігу 5 52444 якого робиться підрахунок імпульсів з оптичного датчика. При підстановці значень за період вісім секунд формула приймає вигляд: VSW(8) = 0,0102 n, тобто, для розглянутої конфігурації коефіцієнт дорівнює k = 0,0102; усереднення швидкості вітру розраховується за менший відрізок часу усереднення. Для виявлення різниці між прототипом та експериментальним зразком було проведено серію 6 експериментів. Для проведення даного експерименту розміщали пристрій-прототип і експериментальний зразок в закритому приміщенні та направляли на пристрої точкове джерело повітря. Напрямок і силу дії вітру змінювали з часом. У першій половині експерименту порівнювали свідчення пристроїв по вимірюванню напрямку вітру. Результати зведено в таблицю 1. Таблиця 1 Експериментальні показники вимірювання напрямку вітру. Час вимірювання напрямку вітру (хв.) Показання датчика вітру LB-747 (румб) 15 30 60 90 120 N NE S SW NW Показання експериментального зразка анемометричної системи (румб) N NNE SSW SW NNW У другій половині експерименту порівнювали свідчення пристроїв по вимірюванню швидкості вітру. Результати зведено в таблицю 2. Таблиця 2 Експериментальні показники вимірювання швидкості вітру. Час вимірювання швидкості вітру (хв.) 15 30 60 90 Показання датчика вітру LB-747 (м/с) 0,6 1,8 3,2 5,4 Показання експериментального зразка анемометричної системи (м/с) 0,5 1,7 3,2 5,3 У таблиці 3 зведено інформацію щодо визначення кількості вимірів двома системами за дві хвилини. Таблиця 3 Порівняння кількості вимірів за дві хвилини. Показання датчика вітру LB-747 Показання експериментального зразка анемометричної системи Час вимірювання швидкості вітру (хв.) 2 Кількість вимірів, визначених за час вимірювання 1 2 5 Аналізуючи дані експериментальної таблиці 1, наприклад, протягом тридцяти хвилин, впродовж котрих виконувались виміри, датчиком LB-747 було встановлено напрямок вітру NE, а показання напрямку вітру, визначені експериментальним зразком анемометричної системи, склали NNE, звідки можна зробити висновок, що вимірювання за допомогою експериментального зразка анемометра проводилось з більшою точністю, завдяки застосуванню шістнадцяти/румбової системи у вузлі фіксування напрямку руху повітряних мас. Аналізуючи дані експериментальної таблиці 2, Знайдені значення швидкості вітру (м/с) 1,8 1,7;1,8;1,8;1,7;1,8 наприклад, протягом тридцяти хвилин, впродовж котрих виконувались виміри, датчиком LB-747 було встановлено швидкість вітру 1,8м/с, а показання швидкості вітру, визначені експериментальним зразком анемометричної системи складали 1,7м/с, звідки можна зробити висновок, що вимірювання, які проводились за допомогою експериментального зразка анемометра, також е достовірними. Також слід зазначити, що інтервал між вимірюваннями напрямку вітру або швидкості руху повітряних мас може бути змінений за бажанням користувача. В експериментальній таблиці 3, зведено дані про 7 52444 результати вимірів двома системами, котрі проводились за інтервал в дві хвилини, з таблиці видно, що датчиком LB-747 було знайдено одно значення швидкості вітру, яке дорівнювало 1,8м/с, тоді як експериментальним зразком анемометричної системи було знайдено п'ять значень швидкості вітру, звідки знайдено середнє значення швидкості вітру, яке дорівнює 1,76м/с, тому можна зробити висновок про значне підвищення точності анемометричної системи, що дуже важливо для удосконалення систем керування рухом судна при проходженні по вузьким каналам та протокам. На Фіг. представлено блок - схему анемометричної системи. Виходи вузла контролю швидкості вітру (1) та вузла контролю напряму вітру (2), який використовує шістнадцятирумбову систему, підключено до входів мікроконтролера (3); блок контролю напряму вітру (2) з'єднаний з блоком аналого-цифрового перетворювача (4), вихід блока контролю швидкості вітру (1) з'єднаний з блоком усереднення кількості імпульсів та фільтрування випадкових коливань (5), вихід якого з'єднаний з блоком перерахунку кількості імпульсів у швидкість потоку вітру (6), який пов'язаний з блоком контролю швидкості вітру по заданому значенню (7), що з'єднаний з блоком світлової та звукової індикації (8). Крім того, мікроконтролерний блок (3) призначений для подачі даних у процесі вимірювання на LCDдисплей (9), блок пульта керування (10) призначений для завдання режимів роботи системи. Анемометрична система реалізується таким чином. При подачі основної живлячої напруги +5V, +12V на електронні блоки. починає проводитись ініціювання таймерів, робочих регістрів, програм Комп’ютерна верстка Л.Купенко 8 них бітів, LCD-дисплея. (9) При виборі певного режиму роботи та натисненні кнопки /START/ на пульті керування (10), починається ініціювання основних елементів пам'яті і допоміжних регістрів перед початком вимірювання швидкості вітру. Відбувається старт таймера-лічильника на рахунок імпульсів від джерела збуджувальної сили. При досяганні лічильником часу вимірювання швидкості вітру значення константи /Nsek/, лічильник зупиняється, а значення кількості Імпульсів нарахованих лічильником надходить до блока усереднення (5), що входить до складу мікропроцесора (3), потім виконується виклик блока (6), що виконує перерахунок повного числа імпульсів, накопичених за час вимірювання, якщо значення вимиряної швидкості не перевищує константи, то, відбувається виведення інформації на LCD-дисплей (9). Якщо значення вимиряної швидкості вітру більше ніж задана константа, то з блока контролю швидкості вітру по заданому значенню (7) на блок аварійної сигналізації (8) подається тривожний сигнал, після цього необхідно за допомогою пульта керування (10) вибрати більше за попереднє граничне значення швидкості вітру, потім вимір починається спочатку, також на LCD-дисплей (10) з блока усереднення швидкості вітру (6) подається інформаційний сигнал середнього значення швидкості вітру. При визначенні напряму вітру вихідний сигнал з вузла (2) подається на блок аналого-цифрового перетворювача (4), після обробки отримана інформація відображається на LCD-дисплеї (9). Таким чином позитивний ефект у поліпшенні маневреності судна та підвищенні безпеки мореплавання у прибережних водах і вузьких каналах досягнута завдяки новій анемометричной системі. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAnemometric system
Автори англійськоюTymchenko Viktor Leonidovych, Tymchenko Ina Viktorivna, Kuklina Kateryna Oleksiivna
Назва патенту російськоюАнемометрическая система
Автори російськоюТымченко Виктор Леонидович, Тимченко Инна Викторовна, Куклина Екатерина Алексеевна
МПК / Мітки
МПК: G01P 5/00
Мітки: система, анемометрична
Код посилання
<a href="https://ua.patents.su/4-52444-anemometrichna-sistema.html" target="_blank" rel="follow" title="База патентів України">Анемометрична система</a>
Багатоканальна система контролю стану об’єкта
Номер патенту: 37759
Опубліковано: 10.12.2008
Автори: Бандура Іван Миколайович, Зимовін Анатолій Якович, Кірієнко Сергій Олександрович
МПК: G07C 5/00
Мітки: об'єкта, багатоканальна, система, стану, контролю
Формула / Реферат:
Багатоканальна система контролю стану об'єкта, яка містить блок датчиків, виходи яких через контролер з'єднані з блоком індикації, яка відрізняється тим, що в неї введені блок уставок, з'єднаний з контролером та блоком зв'язку, годинник реального часу, вихід якого з'єднаний з входом контролера, диспетчер, виходи якого з'єднані з входами контролера та блока зв'язку, блок архівації, входи якого з'єднані з виходами контролера та блока...
Автоматизована система розробки діагностичного забезпечення
Номер патенту: 45147
Опубліковано: 26.10.2009
Автори: Бандура Іван Миколайович, Ковалевський Костянтин Геннадійович
МПК: G06F 15/00
Мітки: система, розробки, забезпечення, автоматизована, діагностичного
Формула / Реферат:
Автоматизована система розробки діагностичного забезпечення, що містить інформаційну шину, формувач діагностичної моделі, перший та другий блоки пам'яті, блок одержання оцінок діагностичних ознак, блок моделювання номінального процесу, аналізатор відхилень ознак, аналізатор швидкості відхилень ознак, блок допускового контролю, аналізатор місця відмов, вихідну шину, причому виходи першого блока пам'яті з'єднані з першою групою входів блока...
Автоматизована система розробки діагностичного забезпечення

Номер патенту: 17803
Опубліковано: 16.10.2006
Автори: Тетеревятніков Дмитро Володимирович, Мирна Олена Володимирівна, Гавриленко Олег Іванович, Циганкова Ольга Анатоліївна
МПК: G06F 15/00
Мітки: автоматизована, розробки, система, діагностичного, забезпечення
Формула / Реферат:
Автоматизована система розробки діагностичного забезпечення, що містить інформаційну шину, вихідну шину, блок допускового контролю, два блоки пам'яті, причому виходи першого блока пам'яті з'єднані з першою групою блока допускового контролю, формувач діагностичної моделі, блок одержання оцінок діагностичних ознак, блок моделювання номінального процесу, аналізатор відхилень ознак, аналізатор місця відмов, причому інформаційна шина з'єднана з...
Система стабілізації вихідної напруги вітрогенераторної установки
Номер патенту: 37387
Опубліковано: 25.11.2008
Автори: Бандура Іван Миколайович, Субота Анатолій Максимович, Заболотний Олександр Вікторович, Мілютіна Юлія Олександрівна, Дибська Ірина Юрійовна
МПК: F03D 7/00
Мітки: вітрогенераторної, напруги, установки, вихідної, стабілізації, система
Формула / Реферат:
Система стабілізації вихідної напруги вітрогенераторної установки, що містить задатчик швидкості обертання ротора, датчики швидкості вітру, швидкості ротора, швидкості обертання електрогенератора та датчик обертального моменту електрогенератора і послідовно з'єднані підсилювач-перетворювач, привід поворотних лопаток, ротор з поворотними лопатками, редуктор та електрогенератор, яка відрізняється тим, що в неї введений нечіткий регулятор, що...
Автоматизована система розробки діагностичного забезпечення
Номер патенту: 25484
Опубліковано: 10.08.2007
Автори: Гавриленко Олена Володимирівна, Гавриленко Олег Іванович, Матяш Ольга Анатоліївна, Резнікова Ольга Вікторівна
МПК: G06F 15/00
Мітки: діагностичного, система, забезпечення, автоматизована, розробки
Формула / Реферат:
Автоматизована система розробки діагностичного забезпечення, що містить інформаційну шину, формувач діагностичної моделі, блок пам'яті, блок одержання оцінок діагностичних ознак, блок моделювання номінального процесу, аналізатор відхилень ознак, аналізатор швидкості відхилень ознак, блок допускового контролю, блок пам'яті, аналізатор місця відмов, вихідну шину, причому виходи першого блока пам'яті з'єднані з першою групою блока допускового...