Система стабілізації вихідної напруги вітрогенераторної установки
Номер патенту: 37387
Опубліковано: 25.11.2008
Автори: Мілютіна Юлія Олександрівна, Заболотний Олександр Вікторович, Бандура Іван Миколайович, Дибська Ірина Юрійовна, Субота Анатолій Максимович
Формула / Реферат
Система стабілізації вихідної напруги вітрогенераторної установки, що містить задатчик швидкості обертання ротора, датчики швидкості вітру, швидкості ротора, швидкості обертання електрогенератора та датчик обертального моменту електрогенератора і послідовно з'єднані підсилювач-перетворювач, привід поворотних лопаток, ротор з поворотними лопатками, редуктор та електрогенератор, яка відрізняється тим, що в неї введений нечіткий регулятор, що містить блок формування і розпізнавання образів, вхід якого з'єднаний з виходами датчиків швидкості вітру, швидкості ротора, швидкості обертання електрогенератора та датчика обертального моменту електрогенератора, а вихід блока формування і розпізнавання образів послідовно через блок збереження історії керування, блок формування правил керування, базу знань, блок прийняття рішень підключений до підсилювача-перетворювача, а також вихід блока формування і розпізнавання образів з'єднаний з входом блока прийняття рішень, входом блока оцінки стану об'єкта керування, вихід якого з'єднаний із блоком прийняття рішень.
Текст
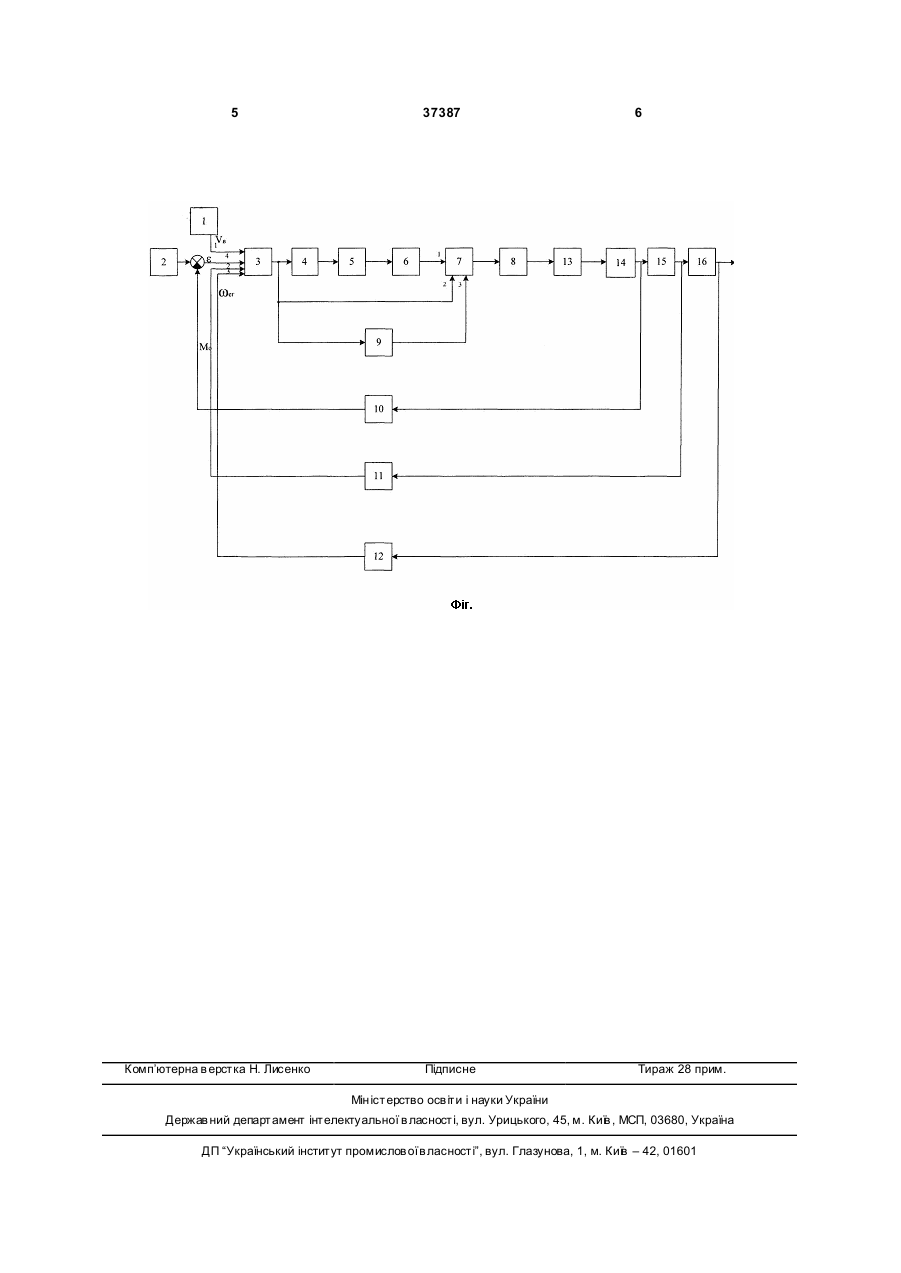
Система стабілізації вихідної напруги вітрогенераторної установки, що містить задатчик швидкості обертання ротора, датчики швидкості вітру, швидкості ротора, швидкості обертання електрогенератора та датчик обертального моменту електрогенератора і послідовно з'єднані підсилювач 3 37387 послідовно через блок збереження історії керування, блок формування правил керування, базу знань, блок прийняття рішень підключений до підсилювача-перетворювача, а також вихід блоку формування і розпізнавання образів з'єднані з входом блоку прийняття рішень, блоку оцінки стану об'єкта керування, вхід якого з'єднаний з виходом блоку формування і розпізнавання образів, а вихід з'єднаний із блоком прийняття рішень. Сутність корисної моделі пояснюється кресленням, де на Фіг. приведена блок-схема системи стабілізації вихідної напруги вітрогенераторної установки. Система містить датчики швидкості вітру 1, датчик швидкості обертання електрогенератора 11, датчик обертаючого моменту електрогенератора 12, виходи яких з'єднані з першим, другим і третім входами блока формування і розпізнавання образів 3. Також на четвертий вхід блока формування і розпізнавання образів 3 поступає різниця між сигналами заданого значення швидкості ротора, отриманого із задатчика 2, і дійсного значення швидкості ротора, отриманого із датчика швидкості ротора 10. Вихід блока формування і розпізнавання образів 3 з'єднаний послідовно через блок збереження історії керування 4, блок формування правил керування 5, базу знань 6, блок прийняття рішень 7 (через перший вхід) з входом підсилювача-перетворювача 8, вихід підсилювачаперетворювача з'єднаний з виконавчим органом 13, який повертає на потрібний кут лопатки, вихід блоку формування і розпізнавання образів 3 також з'єднаний із входом блоку 9 оцінки стану об'єкта керування 14 і другим входом блоку прийняття рішень 7, вихід блоку 9 оцінки стану об'єкта керування 14 з'єднаний із третім входом блока прийняття рішень 7. Задача керування забезпечити постійну ви хідну напругу генератора 16, який через редуктор 15 з'єднаний з ротором об'єкта керування 14. Система працює наступним чином. Через рівні інтервали часу вимірювані параметри з датчиків у вигляді фізичних змінних: Vв - швидкість вітру, Мо - величина обертаючого моменту, wег - кутова швидкість обертання електрогенератора і e - відхилення від заданной швидкості ротора надходять на перший, другий, третій і четвертий входи блока формування і розпізнавання образів 3. Блок формування і розпізнавання образів 3 робить зіставлення вхідних фізичних змінних нечітким множинам відповідних нечітких змінних (фазифікация) - обчислення для кожної нечіткої змінної значення характеристичної функції приналежності. Далі відбувається формування образу поточного стану об'єкта керування 14 відповідно до поточного рівня деталізації Li кожної вхідної лінгвістичної змінної. Спочатку кожна вхідна фізична 4 змінна порівнюється, наприклад, тільки з трьома вхідними нечіткими змінними: Li = 3 . При накопиченні певної кількості знань для підвищення якості керування часто виникає необхідність у більш точному вимірі будь-якого вхідного параметра. Тоді діапазон значень відповідної вхідної фізичної змінної розбивається на більше число інтервалів, наприклад, на Li + 2 , і система починає оперувати вже 5-ю нечіткими змінними замість 3-х і т.д. Потім сформований нечіткий образ надходить на вхід блока 9 оцінки стану об'єкта керування 14, що обчислює для цього образа оцінку E по формулі N0 é M0 æ L - 2 × H - L ö ù i ij i ÷ú (1) E = minêminç ÷ú i=1 ê j=1 ç ç Li ÷ ê ú è øû ë де N0 - кількість лінгвістичних змінних системи; M0 - максимальне число нечітких змінних; Li - рівень деталізації і-ої змінної; Hij - назва нечіткої змінної, яка співпадає з но мером інтервалу (нечіткої множини) з діапазону значень фізичної змінної. У базі знань 6 системи формується сукупність пам'яті історії керування і набір нечітких правил керування. Блок збереження історії керування 4 зберігає кінцеву послідовність образів станів об'єкта керування 14 і керуючих впливів. Причому для дотримання умови дискретності пам'ять історії керування може зберігати інформацію, отриману тільки на останніх тактах керування, а всі дані про стан об'єкта керування 14 на тактах керування, які віддалені від поточного моменту часу втрачаються. Узагальнена інформація про більш ранні події в історії керування може зберігатися в базі знань 6 нечітких правил керування, якщо вона ще не втратила своєї актуальності. Блок формування правил керування 5 забезпечує один з аспектів адаптивності розроблюваної системи: динамічне формування нечітких правил керування. Через визначене число тактів проглядається історія керування і виконується пошук повторюваних фрагментів. Блок прийняття рішень 7 обчислює ступені належності значень вихідних сигналів вихідних нечітких змінних кожного правила відповідно до основних операцій над нечіткими множинами, підставляючи в посилки правил ступені належності вхідних перемінних відповідних нечітким образам. Далі по обчисленим ступеням належності знаходяться значення вихідного сигналу. Керуючі сигнали подаються на виконавчий орган 13 через підсилювач-перетворювач 8. Таким чином запропонована модель дозволяє поліпшити швидкість реагування системи на миттєву зміну сили вітр у. 5 Комп’ютерна в ерстка Н. Лисенко 37387 6 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for stabilization of output voltage of wind-power unit
Автори англійськоюSubota Anatolii Maksymovych, Dybska Iryna Yuriivna, Bandura Ivan Mykolaiovych, Zabolotnyi Oleksandr Viktorovych, Miliutina Yulia Oleksandrivna
Назва патенту російськоюСистема стабилизации выходного напряжения ветрогенераторной установки
Автори російськоюСуббота Анатолий Максимович, Дибская Ирина Юрьевна, Бандура Иван Николаевич, Заболотный Александр Викторович, Милютина Юлия Александровна
МПК / Мітки
МПК: F03D 7/00
Мітки: вихідної, вітрогенераторної, установки, напруги, стабілізації, система
Код посилання
<a href="https://ua.patents.su/3-37387-sistema-stabilizaci-vikhidno-naprugi-vitrogeneratorno-ustanovki.html" target="_blank" rel="follow" title="База патентів України">Система стабілізації вихідної напруги вітрогенераторної установки</a>
Система стабілізації кутового руху космічного апарата
Номер патенту: 35087
Опубліковано: 26.08.2008
Автори: Бандура Іван Миколайович, Симонов Володимир Федорович, Пхайко Ірина Вікторівна
МПК: B64G 1/24
Мітки: система, руху, космічного, кутового, стабілізації, апарата
Формула / Реферат:
Система стабілізації кутового руху космічного апарата, що складається з датчика відхилення кута тангажа і датчика кутової швидкості, виходи яких послідовно через підсилювач-перетворювач, рульові приводи з потенціометром у зворотному зв'язку підключені до виконавчого органа, яка відрізняється тим, що в неї введений нечіткий регулятор, що містить блок формування і розпізнавання образів, вхід якого з'єднаний з виходами датчиків відхилення кута...
Система стабілізації бокового каналу безпілотного літального апарата
Номер патенту: 36498
Опубліковано: 27.10.2008
Автори: Бондар Катерина Михайлівна, Жалніна Вікторія Василівна, Амелін Сергій Вікторович
МПК: G05D 1/03
Мітки: літального, бокового, система, каналу, стабілізації, безпілотного, апарата
Формула / Реферат:
Система стабілізації бокового каналу безпілотного літального апарата, що містить перший та другий порівнювальні пристрої, електронні ключі, сервопривід, вихід якого з'єднаний з входом об'єкта керування, а вхід - з виходом першого блока формування керуючих сигналів, датчик кута та датчик кутової швидкості, які послідовно з'єднані з виходами об'єкта керування, яка відрізняється тим, що до її складу введені нормуючі підсилювачі, входи яких...
Пристрій для пoмноження напруги з малою залежністю вихідної напруги від напруги живлення
Номер патенту: 45463
Опубліковано: 15.04.2002
Автори: Блох Мартін, Лаутербах Крістл
МПК: H02M 3/04
Мітки: вихідної, напруги, помноження, пристрій, малою, живлення, залежністю
Формула / Реферат:
1. Пристрій для помноження напруги з малою залежністю вихідної напруги від напруги живлення, у якому, щонайменше, два транзистори накачки з'єднані послідовно, причому перший транзистор накачки з'єднаний безпосередньо з вводом напруги на вході, а останній транзистор накачки безпосередньо або опосередковано з'єднаний з виводом напруги на виході пристрою, при цьому затвори непарних транзисторів накачки через перші ємності з'єднані з виводом...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Величко Надія Вікторівна, Бандура Іван Миколайович, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: безпілотного, літального, система, апарата, стабілізації
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Спосіб обмеження вихідних струмів трифазного мостового інвертора напруги з широтно-імпульсним регулюванням вихідної напруги, який живить двигун змінного струму
Номер патенту: 20237
Опубліковано: 15.01.2007
Автори: Волков Олександр Васильович, Скалько Юрій Сергійович
МПК: H02P 27/04
Мітки: змінного, регулюванням, струмів, трифазного, двигун, вихідної, напруги, обмеження, широтно-імпульсним, мостового, живить, спосіб, струму, вихідних, інвертора
Формула / Реферат:
Спосіб обмеження вихідних струмів трифазного мостового інвертора з широтно-імпульсним регулюванням вихідної напруги, який живить двигун змінного струму, який полягає у тому, що контролюють вихідні фазні струми інвертора, порівнюють миттєві абсолютні значення кожного з контрольованих вихідних фазних струмів інвертора з припустимим для них граничним значенням, і якщо ці струми не перевищують граничного значення, задають відкриті і закриті стани...
Попередній патент: Інерціальний вимірювальний блок
Наступний патент: Засіб для лікування серцево-судинних захворювань для парентерального застосування
Випадковий патент: Пристрій для фіксації та переміщення викотного візка у шафі розподільного пристрою