Механізм двокоординатних переміщень фурнітуротримача швейного напівавтомата
Номер патенту: 53395
Опубліковано: 15.01.2003
Автори: Кошель Ганна Володимирівна, Пищиков В'ячеслав Олексійович, Орловський Броніслав Вікентійович
Формула / Реферат
Механізм двокоординатних переміщень фурнітуротримача швейного напівавтомата, що включає тричленну ланку для з'єднання з фурнітуротримачем, кінематичний ланцюг для поздовжніх переміщень, з яким кінематично з'єднана однією стороною тричленна ланка, друга сторона якої з'єднана з нерухомою направницею, двобічний пазовий кулачок, закріплений на валу і з'єднаний з кінематичним ланцюгом для поздовжніх переміщень та кінематичним ланцюгом для поперечних переміщень з коромислом, кінематично з'єднаним з третьою стороною тричленної ланки, який відрізняється тим, що він додатково містить з'єднувальну проміжну ланку, яка встановлена між коромислом кінематичного ланцюга для поперечних переміщень і третьою стороною тричленної ланки та утворює з нею нижчу кінематичну пару.
Текст
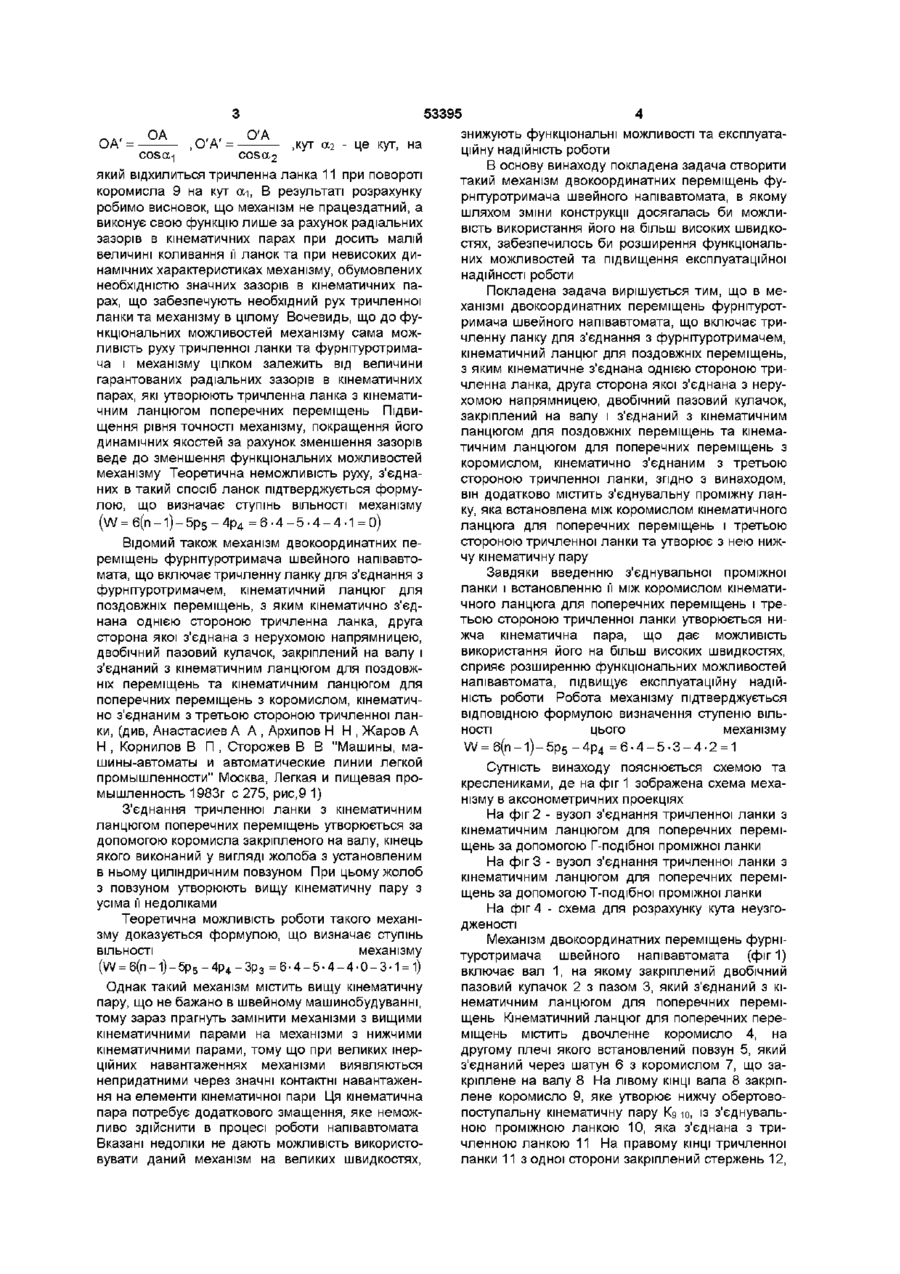
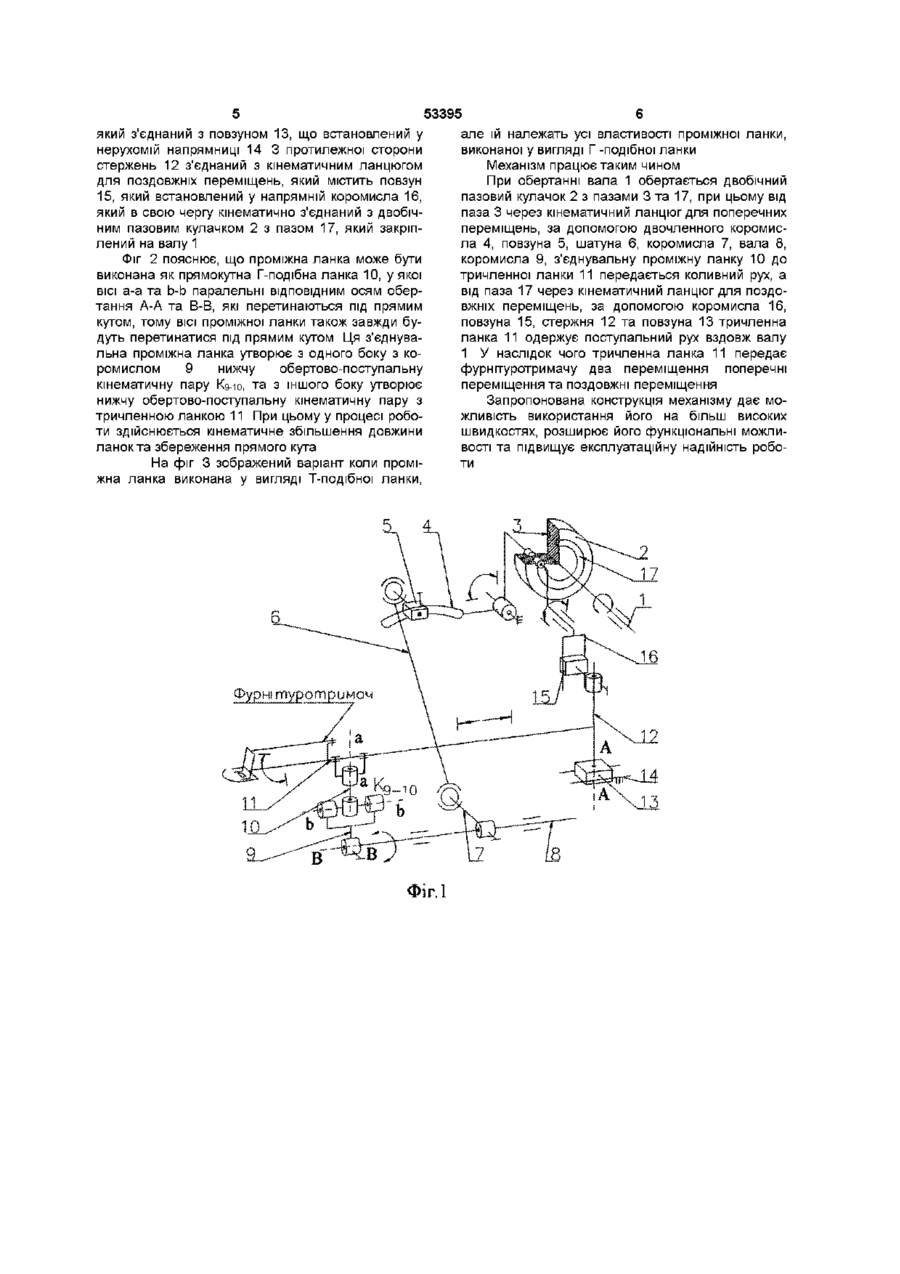
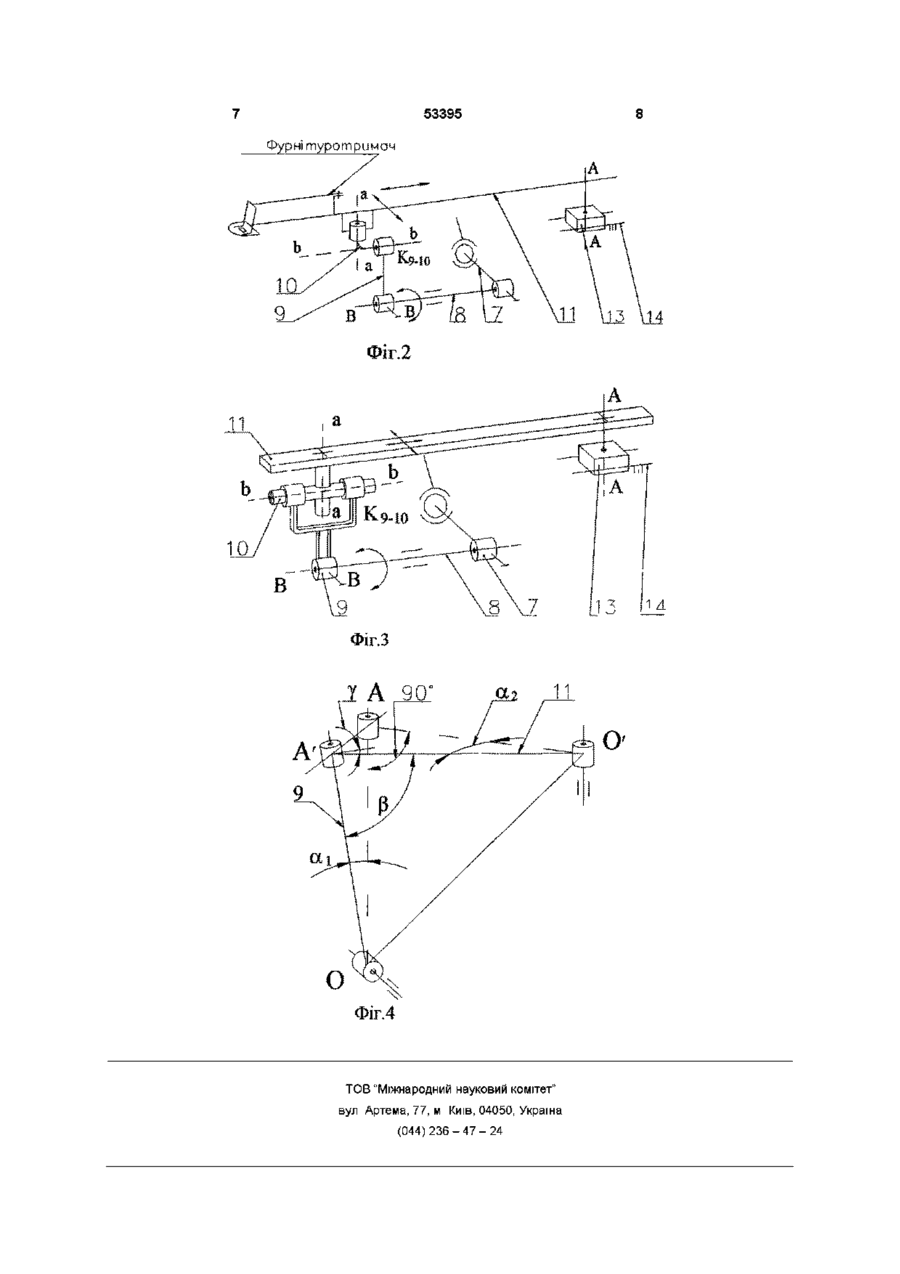
Механізм двокоординатних переміщень фурнітуротримача швейного напівавтомата, що включає тричленну ланку для з'єднання з фурнітуротримачем, кінематичний ланцюг для поздовжніх переміщень, з яким кінематично з єднана однією стороною тричленна ланка, друга сторона якої з'єднана з нерухомою направницею, двобічний пазовий кулачок, закріплений на валу і з'єднаний з кінематичним ланцюгом для поздовжніх переміщень та кінематичним ланцюгом для поперечних переміщень з коромислом, кінематично з'єднаним з третьою стороною тричленної ланки, який відрізняється тим, що він додатково містить з'єднувальну проміжну ланку, яка встановлена між коромислом кінематичного ланцюга для поперечних переміщень і третьою стороною тричленної ланки та утворює з нею нижчу кінематичну пару Винахід відноситься до області швейного виробництва, а саме до швейних машин - напівавтоматів Відомий механізм двокоординатних переміщень фурнітуротримача швейного напівавтомата, що включає тричленну ланку для з'єднання з фурнітуротримачем, кінематичний ланцюг для поздовжніх переміщень, з яким кінематично з'єднана однією стороною тричленна ланка, друга сторона якої з'єднана з нерухомою напрямницею, двобічний пазовий кулачок, закріплений на валу і з'єднаний з кінематичним ланцюгом для поздовжніх переміщень та кінематичним ланцюгом для поперечних переміщень з коромислом, кінематично з'єднаним з третьою стороною тричленної ланки переміщень не здатне забезпечувати переміщення ланки у двох напрямках (поздовжньому та поперечному) Будь-якому повороту коромисла 9 та тричленної ланки 11 кінематично з'єднаних таким чином, відповідає збільшення кінематичної довжини та зміни величини кута, який утворюють між собою ці ланки ВІСІ коромисла 9 і тричленної ланки 11 перетинаються під прямим кутом тільки у середньому положенні Розглядаючи два положення механізму (фіг 4), кут неузгодженості у розраховується як різниця між кутом, який утворює коромисло 9 та тричленна ланка 11 у середньому положенні, (на фіг 4 представлене пунктиром) який дорівнює 90°, та кутом Д який утворює коромисло 9 та тричленна ланка 11 у іншому положенні, коли коромисло 9 відхилилося від середнього положення на кут а у=90°-р Кут р можна підрахувати за теоремою косинусів Цей механізм двокоординатних переміщень фурнітуротримача швейного напівавтомата використовують для пришивання фурнітури 95 класу ПМЗ (див Вальщиков Н М Шарапин А И , Идиатулин И А, Вальщиков Ю Н "Оборудование швейного производства" Москва, Легкая индустрия 1977г с 226) Кінематичний ланцюг для поперечних переміщень з коромислом за допомогою циліндра, який встановлений до пазу повзуна, який кріпиться до тричленної ланки, з'єднаний з фурнітуротримачем Виконане таким чином з'єднування тричленної ланки з кінематичним ланцюгом для поперечних = arccos (ОА') 2 +(О'А') 2 -(ОО') 2 2-ОА'-О'А' Для цього потрібно знайти відстані ОА' , О'А' та ОО' ОО'постійна величина, тому що це відстань між центром кінематичної пари, яку утворює коромисло 9 з валом, та центром кінематичної пари, яку утворює тричленна ланка 11 з нерухомою напрямницею ОА' , О'А' знайдемо з підрахунків, ю о> CO ГО Ю 53395 0A' = OA О'А' = - ^ cosa2 ,кут - це кут, на який відхилиться тричленна ланка 11 при повороті коромисла 9 на кут ои, В результаті розрахунку робимо висновок, що механізм не працездатний, а виконує свою функцію лише за рахунок радіальних зазорів в кінематичних парах при досить малій величині коливання її ланок та при невисоких динамічних характеристиках механізму, обумовлених необхідністю значних зазорів в кінематичних парах, що забезпечують необхідний рух тричленної ланки та механізму в цілому Вочевидь, що до функціональних можливостей механізму сама можливість руху тричленної ланки та фурнітуротримача і механізму цілком залежить від величини гарантованих радіальних зазорів в кінематичних парах, які утворюють тричленна ланка з кінематичним ланцюгом поперечних переміщень Підвищення рівня точності механізму, покращення його динамічних якостей за рахунок зменшення зазорів веде до зменшення функціональних можливостей механізму Теоретична неможливість руху, з'єднаних в такий спосіб ланок підтверджується формулою, що визначає ступінь ВІЛЬНОСТІ механізму (W = б(п -1) - 5р 5 - 4р 4 = 6 • 4 - 5 • 4 - 4 • 1 = 0) Відомий також механізм двокоординатних переміщень фурнітуротримача швейного напівавтомата, що включає тричленну ланку для з'єднання з фурнітуротримачем, кінематичний ланцюг для поздовжніх переміщень, з яким кінематично з'єднана однією стороною тричленна ланка, друга сторона якої з'єднана з нерухомою напрямницею, двобічний пазовий кулачок, закріплений на валу і з'єднаний з кінематичним ланцюгом для поздовжніх переміщень та кінематичним ланцюгом для поперечних переміщень з коромислом, кінематично з'єднаним з третьою стороною тричленної ланки, (див, Анастасиев А А , Архипов Н Н , Жаров А Н , Корнилов В П , Сторожев В В "Машины, машины-автоматы и автоматические линии легкой промышленности" Москва, Легкая и пищевая промышленность 1983г с 275, рис,9 1) знижують функціональні можливості та експлуатаційну надійність роботи В основу винаходу покладена задача створити такий механізм двокоординатних переміщень фурнітуротримача швейного напівавтомата, в якому шляхом зміни конструкції досягалась би можливість використання його на більш високих швидкостях, забезпечилось би розширення функціональних можливостей та підвищення експлуатаційної надійності роботи Покладена задача вирішується тим, що в механізмі двокоординатних переміщень фурнітуротримача швейного напівавтомата, що включає тричленну ланку для з'єднання з фурнітуротримачем, кінематичний ланцюг для поздовжніх переміщень, з яким кінематичне з'єднана однією стороною тричленна ланка, друга сторона якої з'єднана з нерухомою напрямницею, двобічний пазовий кулачок, закріплений на валу і з'єднаний з кінематичним ланцюгом для поздовжніх переміщень та кінематичним ланцюгом для поперечних переміщень з коромислом, кінематично з'єднаним з третьою стороною тричленної ланки, згідно з винаходом, він додатково містить з'єднувальну проміжну ланку, яка встановлена між коромислом кінематичного ланцюга для поперечних переміщень і третьою стороною тричленної ланки та утворює з нею нижчу кінематичну пару Завдяки введенню з'єднувальної проміжної ланки і встановленню її між коромислом кінематичного ланцюга для поперечних переміщень і третьою стороною тричленної ланки утворюється нижча кінематична пара, що дає можливість використання його на більш високих швидкостях, сприяє розширенню функціональних можливостей напівавтомата, підвищує експлуатаційну надійність роботи Робота механізму підтверджується ВІДПОВІДНОЮ формулою визначення ступеню ВІЛЬНОСТІ цього механізму W=6(n-i)-5p5-4p4 =6-4-5-3-4-2 = 1 Сутність винаходу пояснюється схемою та креслениками, де на фіг 1 зображена схема механізму в аксонометричних проекціях З'єднання тричленної ланки з кінематичним На фіг 2 - вузол з'єднання тричленної ланки з ланцюгом поперечних переміщень утворюється за кінематичним ланцюгом для поперечних перемідопомогою коромисла закріпленого на валу, кінець щень за допомогою Г-подібної проміжної ланки якого виконаний у вигляді жолоба з установленим На фіг 3 - вузол з'єднання тричленної ланки з в ньому циліндричним повзуном При цьому жолоб кінематичним ланцюгом для поперечних переміз повзуном утворюють вищу кінематичну пару з щень за допомогою Т-подібної проміжної ланки усіма її недоліками На фіг 4 - схема для розрахунку кута неузгоТеоретична можливість роботи такого механідженості зму доказується формулою, що визначає ступінь Механізм двокоординатних переміщень фурніВІЛЬНОСТІ механізму туротримача швейного напівавтомата (фіг 1) (W = б(п - 1) - 5р 5 - 4р4 - Зр з = 6 • 4 - 5 • 4 - 4 • 0 - 3 • 1 = 1) включає вал 1, на якому закріплений двобічний пазовий кулачок 2 з пазом 3, який з'єднаний з кіОднак такий механізм містить вищу кінематичну нематичним ланцюгом для поперечних переміпару, що не бажано в швейному машинобудуванні, щень Кінематичний ланцюг для поперечних перетому зараз прагнуть замінити механізми з вищими міщень містить двочленне коромисло 4, на кінематичними парами на механізми з нижчими другому плечі якого встановлений повзун 5, який кінематичними парами, тому що при великих інерз'єднаний через шатун 6 з коромислом 7, що заційних навантаженнях механізми виявляються кріплене на валу 8 На лівому КІНЦІ вала 8 закріпнепридатними через значні контактні навантаженлене коромисло 9, яке утворює нижчу обертовоня на елементи кінематичної пари Ця кінематична поступальну кінематичну пару Kg ю, із з'єднувальпара потребує додаткового змащення, яке неможною проміжною ланкою 10, яка з'єднана з триливо здійснити в процесі роботи напівавтомата членною ланкою 11 На правому КІНЦІ тричленної Вказані недоліки не дають можливість використоланки 11 з одної сторони закріплений стержень 12, вувати даний механізм на великих швидкостях, 53395 який з'єднаний з повзуном 13, що встановлений у нерухомій напрямниці 14 3 протилежної сторони стержень 12 з'єднаний з кінематичним ланцюгом для поздовжніх переміщень, який містить повзун 15, який встановлений у напрямній коромисла 16, який в свою чергу кінематично з'єднаний з двобічним пазовим кулачком 2 з пазом 17, який закріплений на валу 1 Фіг 2 пояснює, що проміжна ланка може бути виконана як прямокутна Г-подібна ланка 10, у якої ВІСІ а-а та b-b паралельні ВІДПОВІДНИМ ОСЯМ обер тання А-А та В-В, які перетинаються під прямим кутом, тому ВІСІ проміжної ланки також завжди будуть перетинатися під прямим кутом Ця з'єднувальна проміжна ланка утворює з одного боку з коромислом 9 нижчу обертово-поступальну кінематичну пару Kg-ю, та з іншого боку утворює нижчу обертово-поступальну кінематичну пару з тричленною ланкою 11 При цьому у процесі роботи здійснюється кінематичне збільшення довжини ланок та збереження прямого кута На фіг 3 зображений варіант коли проміжна ланка виконана у вигляді Т-подібної ланки, але їй належать усі властивості проміжної ланки, виконаної у вигляді Г -подібної ланки Механізм працює таким чином При обертанні вала 1 обертається двобічний пазовий кулачок 2 з пазами 3 та 17, при цьому від паза 3 через кінематичний ланцюг для поперечних переміщень, за допомогою двочленного коромисла 4, повзуна 5, шатуна 6, коромисла 7, вала 8, коромисла 9, з'єднувальну проміжну ланку 10 до тричленної ланки 11 передається коливний рух, а від паза 17 через кінематичний ланцюг для поздовжніх переміщень, за допомогою коромисла 16, повзуна 15, стержня 12 та повзуна 13 тричленна ланка 11 одержує поступальний рух вздовж валу 1 У наслідок чого тричленна ланка 11 передає фурнітуротримачу два переміщення поперечні переміщення та поздовжні переміщення Запропонована конструкція механізму дає можливість використання його на більш високих швидкостях, розширює його функціональні можливості та підвищує експлуатаційну надійність роботи 7 53395 Фур ні туро три мом A Фіг.2 11 В \9 ФІГ.: УА 90° Д2 11 О Фіг.4 TOB "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюMechanism for two-cordinate motions of furniture holder of sewing semi-automated unit
Автори англійськоюOrlovskyi Bronislav Vikentiiovych, Pyschikov Viacheslav Oleksiiovych, Koshel Hanna Volodymyrivna
Назва патенту російськоюМеханизм двухкоординатных перемещений фурнитуродержателя швейного полуавтомата
Автори російськоюОрловский Бронислав Викентьевич, Пищиков Вячеслав Алексеевич, Кошель Ганна Владимирівна
МПК / Мітки
МПК: D05B 3/00
Мітки: механізм, швейного, напівавтомата, переміщень, двокоординатних, фурнітуротримача
Код посилання
<a href="https://ua.patents.su/4-53395-mekhanizm-dvokoordinatnikh-peremishhen-furniturotrimacha-shvejjnogo-napivavtomata.html" target="_blank" rel="follow" title="База патентів України">Механізм двокоординатних переміщень фурнітуротримача швейного напівавтомата</a>
Шарнірно-важільний механізм з зупинками

Номер патенту: 44535
Опубліковано: 15.02.2002
Автори: Свєтловський Олександр Борисович, Кіницький Ярослав Тимофійович
МПК: F16H 21/00
Мітки: шарнірно-важільний, зупинками, механізм
Формула / Реферат:
Шарнірно-важільний механізм з зупинками, який має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, який шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом який відрізняється тим, що іншим плечем він зв'язаний з двома або більше: трьома, чотирма, п'ятьма, шістьма шатунами, які відповідно шарнірно зв'язані з повзунами, завдяки чому забезпечується зупинка двох або більше вихідних ланок.
Механізм для перетворення коливальних рухів в однонаправлений поступальний
Номер патенту: 42967
Опубліковано: 15.11.2001
Автор: Вереітінов Віктор Іванович
МПК: A61F 4/00
Мітки: перетворення, поступальний, рухів, однонаправлений, коливальних, механізм
Формула / Реферат:
Механізм для перетворення коливальних рухів в однонаправлений поступальний, що містить, щонайменше, один плоский стрижневий шарнірний кінематичний ланцюг з однією ведучою ланкою в ланцюг, який відрізняється тим, що одна ведена ланка ланцюга служить плечем тришарнірного шатуна з вільним шарніром поза ланцюгом, де проміжний шарнір тришарнірного шатуна є загальним для шатуна і одного кінця ведучої ланки, де ведуча ланка встановлена з можливістю...
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідних ланок
Номер патенту: 51985
Опубліковано: 16.12.2002
Автори: Свєтловський Олександр Борисович, Кіницький Ярослав Тимофійович
МПК: F16H 21/00
Мітки: ланок, шарнірно-важільний, механізм, зупинки, вихідних, регульованою, тривалістю
Формула / Реферат:
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідних ланок містить основу, на якій встановлені кривошип, коромисло і шатун у вигляді двоплечого важеля, що шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом, а іншим плечем за допомогою одного або декількох шатунів - з повзунами, який відрізняється тим, що довжина шатунів регульована.
Кулачково-важільний механізм
Номер патенту: 42005
Опубліковано: 15.10.2001
Автор: Ключковський Сергій Миронович
МПК: F16H 25/00
Мітки: кулачково-важільний, механізм
Формула / Реферат:
Кулачково-важільний механізм, який містить встановлений на валу пазовий кулачок, коромисловий штовхач з роликом, виконаний у вигляді двоплечого важеля, який шарнірно з'єднаний за допомогою шатуна з коромислом і утворює з ними шарнірний чотириланковик, вхідною ланкою якого є штовхач, а вихідною - коромисло, при цьому в позиціях вистою коромисла в обох крайніх положеннях шатун і плече коромислового штовхача, з'єднане з шатуном, розміщені на...
Механізм коливального руху вушкових голок основов’язальної машини
Номер патенту: 51399
Опубліковано: 15.11.2002
Автори: Дворжак Володимир Миколайович, Орловський Броніслав Вікентійович
МПК: D04B 27/00
Мітки: машини, основов'язальної, голок, коливального, вушкових, руху, механізм
Формула / Реферат:
1. Механізм коливального руху вушкових голок основов'язальної машини, що містить гребінку з вушковими голками, закріплену на гребінковій рамці з каменями, які з'єднані з кулісою, закріпленою на валу, на якому закріплене коромисло, що з'єднане з шатуном, який з'єднаний з закріпленою на головному валу ведучою ланкою, який відрізняється тим, що ведуча ланка виконана у вигляді ексцентрика з діаметральним пазом, при цьому ексцентрик містить два...
Попередній патент: Спосіб одержання n,n-диметил-2-[5-(1,2,4-тріазол-1-ілметил)-1н-індол-3-іл]-етиламіну та 2-[5-(1,2,4-тріазол-1-ілметил)-1н-індол-3-іл]-етиловий спирт
Наступний патент: Спосіб лікування міхурово – сечоводного рефлюксу та рефлюкс – нефропатії у дітей
Випадковий патент: Зубний еліксир "ексодент-2"