Механізм для перетворення коливальних рухів в однонаправлений поступальний

Формула / Реферат
Механізм для перетворення коливальних рухів в однонаправлений поступальний, що містить, щонайменше, один плоский стрижневий шарнірний кінематичний ланцюг з однією ведучою ланкою в ланцюг, який відрізняється тим, що одна ведена ланка ланцюга служить плечем тришарнірного шатуна з вільним шарніром поза ланцюгом, де проміжний шарнір тришарнірного шатуна є загальним для шатуна і одного кінця ведучої ланки, де ведуча ланка встановлена з можливістю здійснювати коливальні рухи, де вільний шарнір шатуна і два шарніри ланцюга після шарніра на другому кінці ведучої ланки розташовані з можливістю здійснювати разом поступальне пересування приставним кроком в одному напрямі від вільного шарніра шатуна паралельно або в площині розташування згаданих двох шарнірів ланцюга при нахилі ведучої ланки в будь-яку сторону в межах кута b від площини паралельної напрямку поступального пересування.
Текст
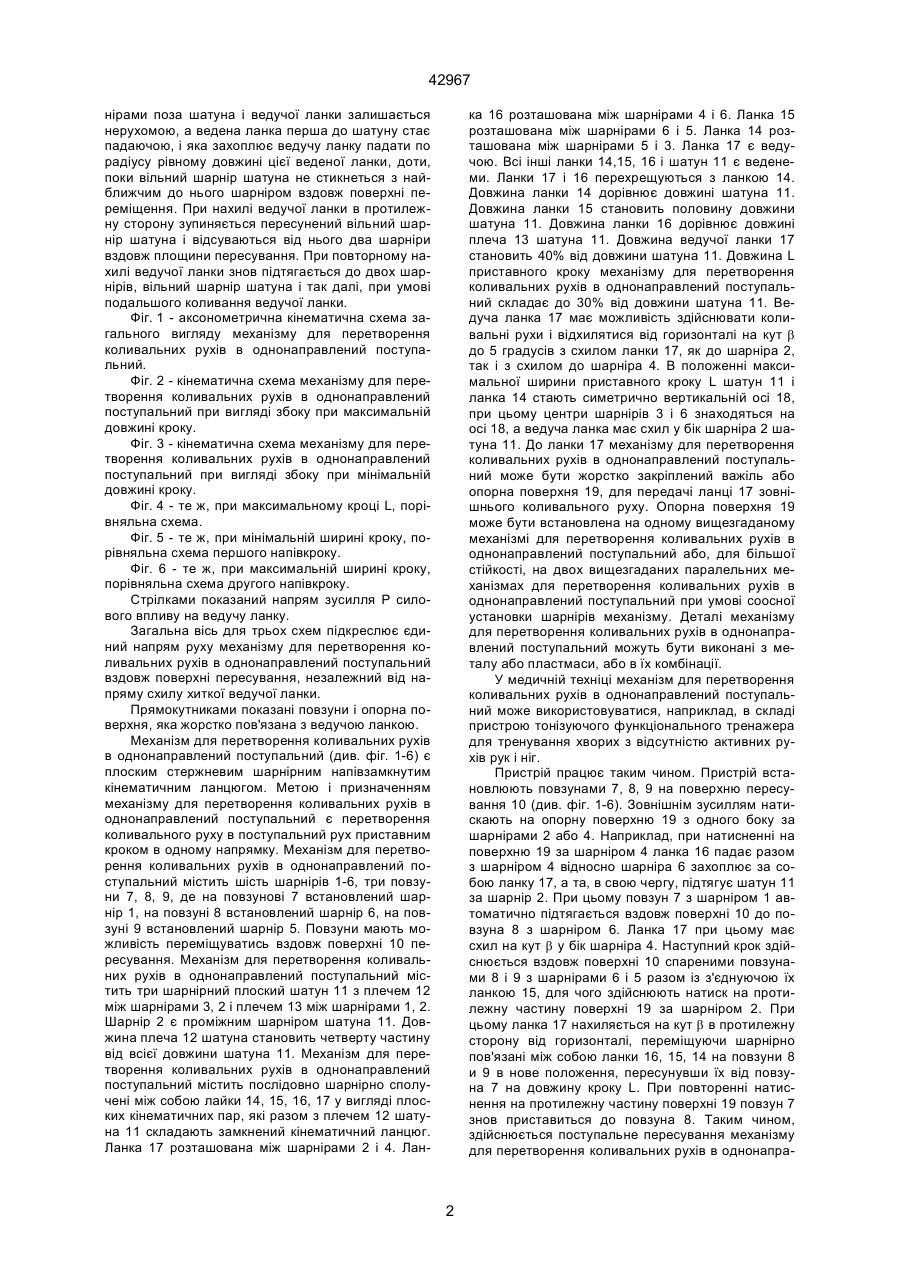
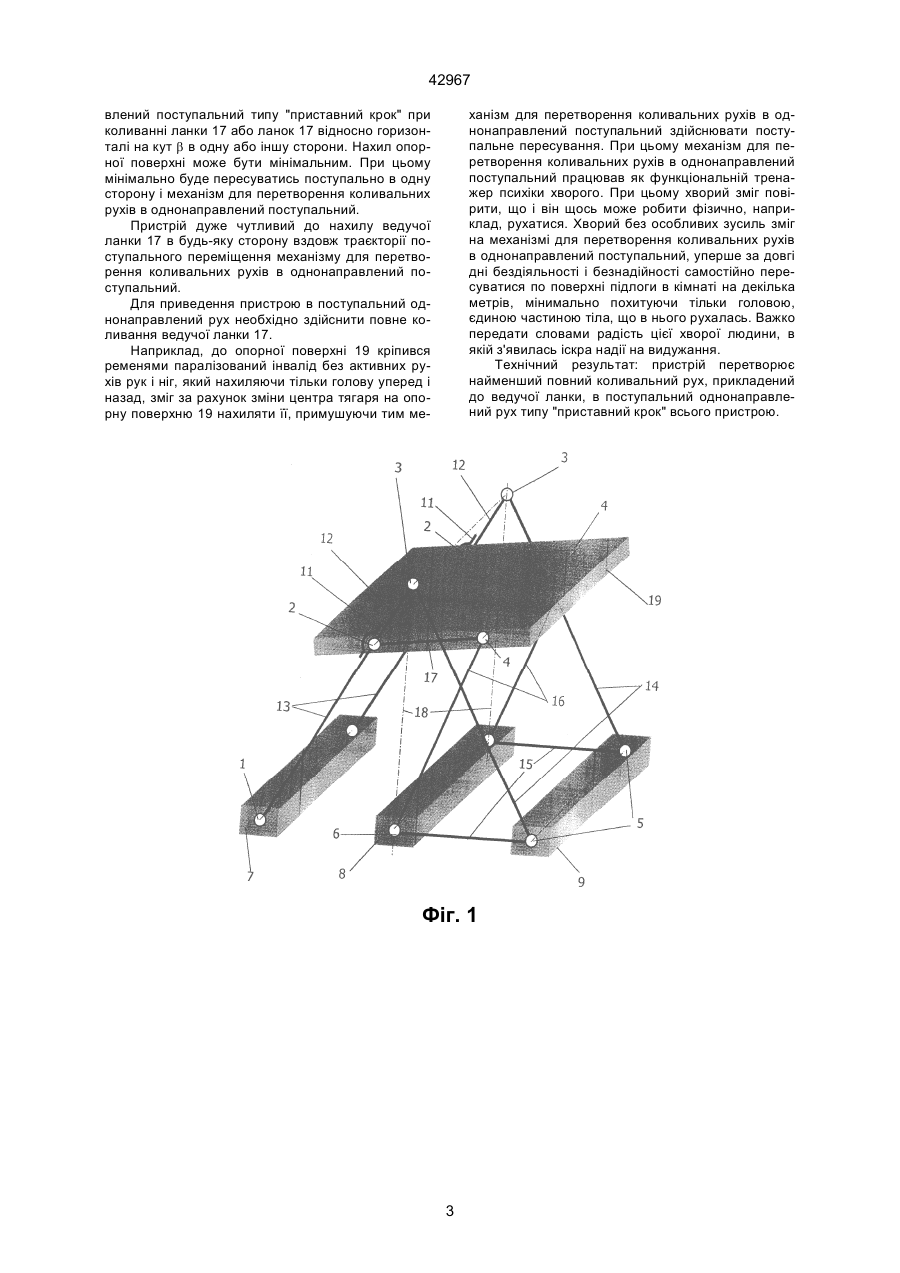
Механізм для перетворення коливальних рухів в однонаправлений поступальний, що містить, щонайменше, один плоский стрижневий шарнірний кінематичний ланцюг з однією ведучою ланкою в ланцюзі, який відрізняється тим, що одна ведена ланка ланцюга служить плечем тришарні 42967 нірами поза шатуна і ведучої ланки залишається нерухомою, а ведена ланка перша до шатуну стає падаючою, і яка захоплює ведучу ланку падати по радіусу рівному довжині цієї веденої ланки, доти, поки вільний шарнір шатуна не стикнеться з найближчим до нього шарніром вздовж поверхні переміщення. При нахилі ведучої ланки в протилежну сторону зупиняється пересунений вільний шарнір шатуна і відсуваються від нього два шарніри вздовж площини пересування. При повторному нахилі ведучої ланки знов підтягається до двох шарнірів, вільний шарнір шатуна і так далі, при умові подальшого коливання ведучої ланки. Фіг. 1 - аксонометрична кінематична схема загального вигляду механізму для перетворення коливальних рухів в однонаправлений поступальний. Фіг. 2 - кінематична схема механізму для перетворення коливальних рухів в однонаправлений поступальний при вигляді збоку при максимальній довжині кроку. Фіг. 3 - кінематична схема механізму для перетворення коливальних рухів в однонаправлений поступальний при вигляді збоку при мінімальній довжині кроку. Фіг. 4 - те ж, при максимальному кроці L, порівняльна схема. Фіг. 5 - те ж, при мінімальній ширині кроку, порівняльна схема першого напівкроку. Фіг. 6 - те ж, при максимальній ширині кроку, порівняльна схема другого напівкроку. Стрілками показаний напрям зусилля Р силового впливу на ведучу ланку. Загальна вісь для трьох схем підкреслює єдиний напрям руху механізму для перетворення коливальних рухів в однонаправлений поступальний вздовж поверхні пересування, незалежний від напряму схилу хиткої ведучої ланки. Прямокутниками показані повзуни і опорна поверхня, яка жорстко пов'язана з ведучою ланкою. Механізм для перетворення коливальних рухів в однонаправлений поступальний (див. фіг. 1-6) є плоским стержневим шарнірним напівзамкнутим кінематичним ланцюгом. Метою і призначенням механізму для перетворення коливальних рухів в однонаправлений поступальний є перетворення коливального руху в поступальний рух приставним кроком в одному напрямку. Механізм для перетворення коливальних рухів в однонаправлений поступальний містить шість шарнірів 1-6, три повзуни 7, 8, 9, де на повзунові 7 встановлений шарнір 1, на повзуні 8 встановлений шарнір 6, на повзуні 9 встановлений шарнір 5. Повзуни мають можливість переміщуватись вздовж поверхні 10 пересування. Механізм для перетворення коливальних рухів в однонаправлений поступальний містить три шарнірний плоский шатун 11 з плечем 12 між шарнірами 3, 2 і плечем 13 між шарнірами 1, 2. Шарнір 2 є проміжним шарніром шатуна 11. Довжина плеча 12 шатуна становить четверту частину від всієї довжини шатуна 11. Механізм для перетворення коливальних рухів в однонаправлений поступальний містить послідовно шарнірно сполучені між собою лайки 14, 15, 16, 17 у вигляді плоских кінематичних пар, які разом з плечем 12 шатуна 11 складають замкнений кінематичний ланцюг. Ланка 17 розташована між шарнірами 2 і 4. Лан ка 16 розташована між шарнірами 4 і 6. Ланка 15 розташована між шарнірами 6 і 5. Ланка 14 розташована між шарнірами 5 і 3. Ланка 17 є ведучою. Всі інші ланки 14,15, 16 і шатун 11 є веденеми. Ланки 17 і 16 перехрещуються з ланкою 14. Довжина ланки 14 дорівнює довжині шатуна 11. Довжина ланки 15 становить половину довжини шатуна 11. Довжина ланки 16 дорівнює довжині плеча 13 шатуна 11. Довжина ведучої ланки 17 становить 40% від довжини шатуна 11. Довжина L приставного кроку механізму для перетворення коливальних рухів в однонаправлений поступальний складає до 30% від довжини шатуна 11. Ведуча ланка 17 має можливість здійснювати коливальні рухи і відхилятися від горизонталі на кут b до 5 градусів з схилом ланки 17, як до шарніра 2, так і з схилом до шарніра 4. В положенні максимальної ширини приставного кроку L шатун 11 і ланка 14 стають симетрично вертикальній осі 18, при цьому центри шарнірів 3 і 6 знаходяться на осі 18, а ведуча ланка має схил у бік шарніра 2 шатуна 11. До ланки 17 механізму для перетворення коливальних рухів в однонаправлений поступальний може бути жорстко закріплений важіль або опорна поверхня 19, для передачі ланці 17 зовнішнього коливального руху. Опорна поверхня 19 може бути встановлена на одному вищезгаданому механізмі для перетворення коливальних рухів в однонаправлений поступальний або, для більшої стійкості, на двох вищезгаданих паралельних механізмах для перетворення коливальних рухів в однонаправлений поступальний при умові соосної установки шарнірів механізму. Деталі механізму для перетворення коливальних рухів в однонаправлений поступальний можуть бути виконані з металу або пластмаси, або в їх комбінації. У медичній техніці механізм для перетворення коливальних рухів в однонаправлений поступальний може використовуватися, наприклад, в складі пристрою тонізуючого функціонального тренажера для тренування хворих з відсутністю активних рухів рук і ніг. Пристрій працює таким чином. Пристрій встановлюють повзунами 7, 8, 9 на поверхню пересування 10 (див. фіг. 1-6). Зовнішнім зусиллям натискають на опорну поверхню 19 з одного боку за шарнірами 2 або 4. Наприклад, при натисненні на поверхню 19 за шарніром 4 ланка 16 падає разом з шарніром 4 відносно шарніра 6 захоплює за собою ланку 17, а та, в свою чергу, підтягує шатун 11 за шарнір 2. При цьому повзун 7 з шарніром 1 автоматично підтягається вздовж поверхні 10 до повзуна 8 з шарніром 6. Ланка 17 при цьому має схил на кут b у бік шарніра 4. Наступний крок здійснюється вздовж поверхні 10 спареними повзунами 8 і 9 з шарнірами 6 і 5 разом із з'єднуючою їх ланкою 15, для чого здійснюють натиск на протилежну частину поверхні 19 за шарніром 2. При цьому ланка 17 нахиляється на кут b в протилежну сторону від горизонталі, переміщуючи шарнірно пов'язані між собою ланки 16, 15, 14 на повзуни 8 и 9 в нове положення, пересунувши їх від повзуна 7 на довжину кроку L. При повторенні натиснення на протилежну частину поверхні 19 повзун 7 знов приставиться до повзуна 8. Таким чином, здійснюється поступальне пересування механізму для перетворення коливальних рухів в однонапра 2 42967 влений поступальний типу "приставний крок" при коливанні ланки 17 або ланок 17 відносно горизонталі на кут b в одну або іншу сторони. Нахил опорної поверхні може бути мінімальним. При цьому мінімально буде пересуватись поступально в одну сторону і механізм для перетворення коливальних рухів в однонаправлений поступальний. Пристрій дуже чутливий до нахилу ведучої ланки 17 в будь-яку сторону вздовж траєкторії поступального переміщення механізму для перетворення коливальних рухів в однонаправлений поступальний. Для приведення пристрою в поступальний однонаправлений рух необхідно здійснити повне коливання ведучої ланки 17. Наприклад, до опорної поверхні 19 кріпився ременями паралізований інвалід без активних рухів рук і ніг, який нахиляючи тільки голову уперед і назад, зміг за рахунок зміни центра тягаря на опорну поверхню 19 нахиляти її, примушуючи тим ме ханізм для перетворення коливальних рухів в однонаправлений поступальний здійснювати поступальне пересування. При цьому механізм для перетворення коливальних рухів в однонаправлений поступальний працював як функціональній тренажер психіки хворого. При цьому хворий зміг повірити, що і він щось може робити фізично, наприклад, рухатися. Хворий без особливих зусиль зміг на механізмі для перетворення коливальних рухів в однонаправлений поступальний, уперше за довгі дні бездіяльності і безнадійності самостійно пересуватися по поверхні підлоги в кімнаті на декілька метрів, мінимально похитуючи тільки головою, єдиною частиною тіла, що в нього рухалась. Важко передати словами радість цієї хворої людини, в якій з'явилась іскра надії на видужання. Технічний результат: пристрій перетворює найменший повний коливальний рух, прикладений до ведучої ланки, в поступальний однонаправлений рух типу "приставний крок" всього пристрою. Фіг. 1 3 42967 Фіг. 2 Фіг. 3 4 42967 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 5
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for transformation of oscillatory motions in translatory motion
Автори англійськоюVereitinov Viktor Ivanovych
Назва патенту російськоюМеханизм превращения колебательных движений в однонаправленное поступательное
Автори російськоюВереитинов Виктор Иванович
МПК / Мітки
МПК: A61F 4/00
Мітки: коливальних, перетворення, рухів, поступальний, однонаправлений, механізм
Код посилання
<a href="https://ua.patents.su/5-42967-mekhanizm-dlya-peretvorennya-kolivalnikh-rukhiv-v-odnonapravlenijj-postupalnijj.html" target="_blank" rel="follow" title="База патентів України">Механізм для перетворення коливальних рухів в однонаправлений поступальний</a>
Механізм для перетворення обертового руху в поступальний

Номер патенту: 31151
Опубліковано: 15.12.2000
Автори: Маркович Юрій Іванович, Сиротюк Віктор Володимирович, Бойко Олександр Валерійович
МПК: H01Q 3/00, F16H 25/20
Мітки: поступальний, руху, обертового, перетворення, механізм
Текст:
...в отворі корпусу з можливістю осьового переміщення в ньому, зубчасті колеса додаткового кінематичного ланцюга встановлені на направляючій з можливістю обертання на ній і підпружинені в осьовому напрямі, гайка одним кінцем встановлена в підшипнику вихідної ланки механізму, а вал -також одним кінцем встановлений в підшипнику корпуса, при цьому число додаткових кінематичних ланцюгів не менше трьох. На фіг.1 зображено загальний вид...
Механізм для перетворення обертального руху в поступальний і навпаки
Номер патенту: 149
Опубліковано: 30.04.1998
Автор: Сердюк Юрій Петрович
МПК: F16H 19/00
Мітки: перетворення, механізм, обертального, руху, поступальний, навпаки
Формула / Реферат:
Механизм для преобразования вращательного движения в поступательное и наоборот, содержащий первую зубчатую рейку и кинематически связанный с ней вал, отличающийся тем, что механизм снабжен корпусом, в котором установлена параллельная первой вторая зубчатая рейка, ось вала перпендикулярна плоскости, проходящей через зубчатые рейки, и расположена на середине расстояния между ними, в корпусе выполнено сквозное отверстие, ось которого...
Механізм для перетворення зворотно-поступального руху в обертовий та навпаки і машина(варіанти), яка містить цей механізм
Номер патенту: 37285
Опубліковано: 15.05.2001
Автор: Адахан Кармелі
МПК: F04B 35/00, F01B 9/00
Мітки: зворотно-поступального, містить, яка, механізм, руху, машина(варіанти, обертовий, навпаки, перетворення
Формула / Реферат:
1. Механізм для перетворення зворотно-поступального руху в обертовий та навпаки, установлений між засобом обертання і засобом зворотно-поступального руху, один з яких є ведучим, а другий видимим, для того, щоб обертовий рух у засобі обертання відповідав зворотно-поступальному руху в засобі зворотно - поступального руху, який містить корпус» зворотно-поступальний елемент, що установлений з можливістю зворотно-поступального руху уздовж...
Пристрій для перетворення обертального руху в зворотно-поступальний
Номер патенту: 5086
Опубліковано: 28.12.1994
Автор: Кравченко Федір Васильович
МПК: F16H 19/00
Мітки: зворотно-поступальний, пристрій, перетворення, руху, обертального
Формула / Реферат:
1. Устройство для преобразования вращательного движения в возвратно-поступательное, содержащее ведущее и ведомое звенья и охватывающую ведущее звено гибкую связь, отличающееся тем, что, с целью расширения кинематических возможностей, ведущее звено выполнено со сбрасывающим гибкую связь винтовым ребром и двумя соединенными последним фланцами, из которых один с плавно изменяющейся против хода вращения от максимальной у ребра до уровня...
Механізм щелкунова для перетворення обертального руху в коливальний
Номер патенту: 29369
Опубліковано: 16.10.2000
Автори: Щелкунов Єгор Єлисейович, Прищепа Микола Петрович, Вороной Віталій Степанович
МПК: F16H 21/40
Мітки: щелкунова, перетворення, коливальний, обертального, руху, механізм
Формула / Реферат:
1. Механізм для перетворення обертального руху в коливальний, що містить кривошип, кінематично зв’язаний з коромислом, який відрізняється тим, що кінематичний зв’язок кривошипа з коромислом здійснено за допомогою шарніра, причому плечі коромисла мають можливість одночасно взаємодіяти з робочою поверхнею введеного у пристрій копіра, що має можливість обертатися, і рівні по довжині з радіусом кривошипа.2. Механізм за п. 1, який...
Попередній патент: Теплоізоляційна суміш для металевих форм відцентрового лиття чавунних відливок з вертикальною віссю обертання
Наступний патент: Рекламно-інформаційне табло
Випадковий патент: Протруйник та спосіб протруювання насіння