Пристрій для вимірювання циклової подачі палива
Номер патенту: 5401
Опубліковано: 15.03.2005
Формула / Реферат
1. Пристрій для вимірювання циклової подачі палива, який має у своєму складі паливний насос високого тиску (ПНВТ), який через паливопровід високого тиску з'єднується з паливною форсункою, встановленою в герметичну камеру впорскування, обладнану керованим клапаном для зливання палива з камери впорскування, та з'єднаною з нею вимірювальною камерою у вигляді гідроциліндра, підпружинений шток якого з'єднаний з датчиком переміщення, електронну обчислювальну машину (ЕОМ), зв'язану через систему керування з керованим клапаном, датчик імпульсів синхронізації, механічно зв'язаний з ПНВТ, який відрізняється тим, що датчик переміщення виконано як датчик положення штока гідроциліндра, який має принаймні два виступи, які можуть взаємодіяти з датчиком положення, датчик синхронізації виконано як датчик фіксованого положення вала ПНВТ, ЕОМ своїми входами з'єднана з виходом датчика положення штока гідроциліндра та виходом датчика фіксованого положення вала ПНВТ, причому на початку вимірювання з датчиком положення штока гідроциліндра не взаємодіє жоден зі згаданих виступів штока гідроциліндра, а сигнал датчика фіксованого положення вала ПНВТ не перекривається у часі з роботою паливної форсунки.
2. Пристрій за п.1, який відрізняється тим, що ЕОМ у першому циклі вимірювання фіксує кількість впорскувань пального у камеру впорскування при кожній зміні стану датчика положення штока гідроциліндра, визначає циклову подачу за виразом:
Ц=Vo/N,
де:
Vo - еталонний об'єм, рівний зміні об'єму гідроциліндра при переміщенні його штока на еталонну відстань, рівну відстані між виступами на штокові гідроциліндра;
N - кількість впорскувань пального паливною форсункою на проміжку часу між спрацьовуваннями датчика положення штока від кожного із виступів;
вираховує значення об'єму для положення штока гідроциліндра на момент повернення датчика положення штока у попередній стан за виразом:
Vп=VoNп/N,
де:
Nп - кількість циклів впорскування пального форсункою на проміжку часу між спрацюванням датчика переміщення штока від першого виступу та поверненням його у початковий стан при виході першого виступу із зони його взаємодії,
а отримане значення використовується як еталонний об'єм при розрахунку циклової подачі за умови, що кількість циклів Nп є достатньою за умови точності вимірювання, причому зазначений цикл повторюється через задані проміжки часу.
Текст
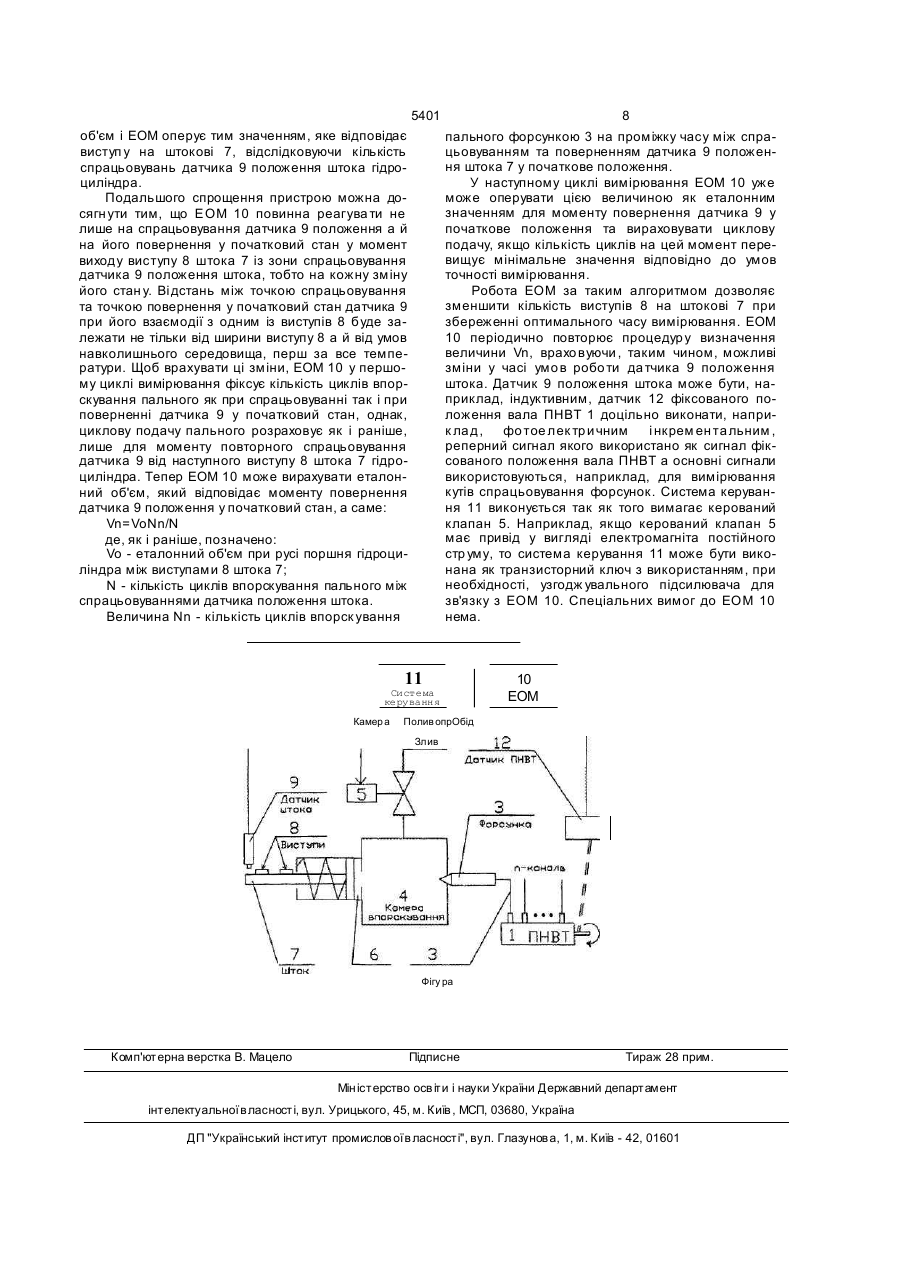
1. Пристрій для вимірювання циклової подачі палива, який має у своєму складі паливний насос високого тиску (ПНВТ), який через паливопровід високого тиску з'єднується з паливною форсункою, встановленою в герметичну камеру впорскування, обладнану керованим клапаном для зливання палива з камери впорскування, та з 'єднаною з нею вимірювальною камерою у ви гляді гідроциліндра, підпружинений шток якого з'єднаний з датчиком переміщення, електронну обчислювальну машину (ЕОМ), зв'язану через систему керування з керованим клапаном, датчик імпульсів синхронізації, механічно зв'язаний з ПНВТ, який відрізняється тим, що датчик переміщення виконано як датчик положення штока гідроциліндра, який має принаймні два виступи, які можуть взаємодіяти з датчиком положення, датчик синхронізації виконано як датчик фіксованого положення вала ПНВТ, ЕОМ своїми входами з'єднана з виходом датчика положення штока гідроциліндра та ви ходом датчика фіксованого положення вала ПНВТ, причому на початку вимірювання з датчиком положення штока гідроциліндра не взаємодіє жоден зі згаданих виступів штока гідроциліндра, а сигнал да тчика фік Корисна модель відноситься до машинобудування, точніше до засобів діагностики паливних насосів високого тиску (ПНВТ) дизельних двигунів. Відомі стенди для діагностики ПНВТ, наприклад ДД10-00, ДД10-01 та інші виробництва Малоярославецького дослідно-виробничого акціонерного заводу, Росія (www.vopa z.ru, www.ddsesel.ru). Вони мають у своєму складі ПНВТ, який через паливопроводи високого тиску з'єднується з паливними форсунками, та мірні ємності у вигляді прозорих мензурок, встановлени х безпосередньо під сованого положення вала ПНВТ не перекривається у часі з роботою паливної форсунки. 2 . П ри стр ій за п .1 , який ві др ізня єть ся тим , що ЕОМ у пер шом у циклі вимірюва ння фіксує кількість впорскувань пального у камеру впорскування при кожній зміні стан у да тчика по ложення штока гідроциліндра , визначає цикло ву подачу за виразом: U=Vo/N, де: Vo - еталонний об'єм, рівний зміні об'єму гідроциліндра при переміщенні його штока на еталонну відстань, рівну відстані між виступами на штокові гідроциліндра; N - кількість впорскувань пального паливною форсункою на проміжку ча су між спрацьо вуваннями датчика положення штока від кожного із виступів; вирахо вує значення об'єм у для положення штока гідроциліндра на момент повернення датчика положення штока у попередній стан за виразом: Vn=VoNn/N, де: Nn - кількість циклів впорскування пального форсункою на проміжку часу між спрацюванням датчика переміщення штока від першого виступ у та поверненням його у поча тковий стан при ви ході першого виступу із зони його взаємодії, а отримане значення використовується як еталонний об'єм при розрахунку циклової подачі за умови, що кількість циклів Nn є достатньою за умови точності вимірювання, причому зазначений цикл повторюється через задані проміжки часу. ю форсунками а також електронний лічильник наперед заданої кількості циклів впорскування пального у мензурки. Недоліком таких стендів є низька точність вимірювання циклової подачі палива, що пов'язано із застосуванням мензурок і, як наслідок, значними похибками відліку через наявність меніска палива у мензурці та піни на поверхні палива. Відомий пристрій для вимірювання циклової подачі палива (А.с. СРСР 1768792 F02M65/00), що має у своєм у складі ПНВТ, який через паливопро О) 5401 від високого тиску з'єднується з паливною форсункою, встановленою в герметичну камеру впорскування, обладнану керованим клапаном для зливання палива з камери впорскування та з'єднаною з нею вимірювальною камерою у вигляді гідроциліндра, підпружинений шток якого з'єднаний з датчиком лінійного переміщення, електронну обчислювальну машин у (ЕОМ), зв'язану через систему керування з керованим клапаном, датчик імпульсів синхронізації, механічно зв'язаний з ПНВТ а також аналого-цифровий перетворювач (АЦП), з'єднаний через підсилювач з датчиком лінійного переміщення, датчиком імпульсів синхронізації та ЕОМ, причому ви хідний сигнал датчика імпульсів синхронізації не перекривається у часі з роботою паливної форсунки - прототип винаходу що заявляється. Пристрій-прототип не має недоліків відомих стендів для діагностики ПНВТ. Недоліком пристрою-прототипу є його складність через наявність датчика лінійного переміщення та АЦП, особливо при виконанні пристрою багатоканальним по кількості секцій ПНВТ для скорочення часу вимірювання. Пристрій має також невисоку то чність вимірювання, яка залежить як від дискретного характеру роботи пристрою у цілому (внаслідок дискретної роботи самого ПНВТ), так і від точності роботи послідовної ланки: датчик лінійного переміщення - підсилювач - АЦП. Окрім того, точність погіршується також внаслідок того, що процес вимірювання починається з моменту надходження команди на закриття керованого клапана, а час спрацювання його є нестабільним та значним порівняно з періодом роботи датчика синхронізації, передусім при роботі на високих швидкостя х обертання вала ПНВТ. Наприклад, для во сьмициліндрового ПНВТ при швидкості обертання 1500об/хв (25Гц) період спрацьовування датчика синхронізації становитиме 40мс/8=5мс. Час спрацювання клапанів складає величин у десь (20-50)мс і, що найгірше , цей час значною мірою залежить від фізичного стан у клапана (зношеності рухомих частин, старіння пружних елементів і т.і.), а також від умов роботи, зокрема температури обмотки керування, яка значною мірою залежить від навколишньої температури та часу прогрівання стенда. Отже, у зазначеному режимі створюється ситуація, коли ЕОМ за сигналами датчика синхронізації вважатиме що процес наповнення вимірювальної камери розпочато, а насправді це не так через низьку швидкодію керованого клапану. Окрім то го, на поча тк у циклу під час спрацьовування керованого клапана частина пального з гідроциліндра буде втрачена з причини неповного перекриття зливного каналу, що призведе до похибки вимірювання. Пристрій-прототип при його практичній реалізації для умов роботи з різноманітними ПНВТ (212 секцій) ускладнюється ще й том у, що да тчик синхронізації мусить бути переналагоджуваним як з огляду кількості вихідних імпульсів, які він повинен виробляти на один оберт ПНВТ (ця кількість має бути рівною кількості секцій), так і у відповідності з кутовою характеристикою роботи секцій ПНВТ, яка у загальному випадку не є рівномірною. Наприклад, для 6-секційно ї ПН ВТ Я МЗ-236 к ути 4 спрацьовування такі (у градусах): 0-75-120-195-240-315, а для 8-секційної ПНВТ ЯМЗ-238Б: 0-45-90-135-180-225-270-315. Забезпечення роботи датчика синхронізації тільки для цих дво х ПНВТ не є простим, а враховуючи справжнє розмаїття схем роботи різних відомих ПНВТ, це стає ще більш проблематичним. Пропонується пристрій для вимірювання цикло во ї по да чі пали ва , що ма є у сво єм у складі ПНВТ, який через паливопровід високого тиску з'єднується з паливною форсункою, встановленою в герметичн у камеру впорскування і обладнану керованим клапаном для зливання палива з камери впорскування та з'єднаною з нею вимірювальною камерою у вигляді гідроциліндра, підпружинений шток якого з'єднаний з датчиком переміщення, електронну обчислювальну машину (ЕОМ), зв'язану через систему керування з керованим клапаном, датчик імпульсів синхронізації, механічно зв'язаний з ПНВТ, який відрізняється такими параметрами: по-перше, - датчик переміщення виконано як датчик положення штока гідроциліндра, що має принаймні два виступи, які можуть взаємодіяти з датчиком положення, по-друге, - датчик синхронізації виконано як датчик фіксованого положення вала ПНВТ, по-третє, - ЕОМ своїми входами з'єднана з виходом датчика положення штока гідроциліндра та виходом датчика фіксованого положення вала ПНВТ, причому на початку вимірювання з датчиком положення штока гідроциліндра не взаємодіє жоден зі згаданих виступів штока гідроциліндра, а сигнал датчика синхронізації не перекривається у часі з роботою паливної форсунки. Суттєвою відмінністю пристрою є те, що да тчик переміщення виконаний як датчик положення штока, котрий має принаймні два виступи, які можуть взаємодіяти з датчиком положення, причому на початку вимірювання з датчиком не взаємодіє жоден із них. У процесі вимірювання виступи штока почергово викликають спрацьовування датчика положення у міру того, як шток переміщується від заповнення вимірювальної камери та долаючи протидію пружини, фіксуючи таким чином наперед відом у відстань , яку про ходи ть шток (вона має бути рівною відстані між згаданими виступами на штокові). Оскільки виступи взаємодіють з одним і тим самим датчиком положення, причому при підході до нього з одного і того ж боку при незмінних інших зовнішні х умова х, то по хибка фіксації моментів часу проходження штоком відомої відстані між виступами наближається до нуля, оскільки за час вимірювання умови спрацьовування датчика практично не змінюються. Саме для виконання цих умов роботи да тчика положення штока потрібно аби жоден із виступі в на ньому не взаємодіяв з датчиком положення на початку циклу вимірювання, оскільки тільки за виконання цієї умови можливе послідовне та почергове спрацьовування датчика положення від кожного з виступів на штокові. Таким чином, підрахувавши кількість циклів впорскування пального саме за цей проміжок часу, з допомогою ЕОМ можна вирахувати циклову подачу пального секції ПНВТ, а саме: 5401 де: я=3,14 (число пі); D - діаметр поршня гідроциліндра вимірювальної камери; L - робочий хід поршня, рівний відстані між виступами на штокові гідроциліндра; N - кількість циклів впорскування пального між спрацьовуваннями датчика положення штока. Зазначимо, що тільки кількість циклів N потребує визначення у циклі вимірювання. Решта величин для визначення циклової подачі є константами для пристрою у конкретному виконанні, отже вони не впливають на точність вимірювання. Таким чином, похибка вимірювання буде визначатися лише похибкою дискретності відліку кількості циклів N потрібних для заповнення еталонного об'єму гідроциліндра, визначеного відстанню між виступами на його штокові. Разом з тим, сук упність ви щезгаданих ознак зумовлює те, що цикл власне вимірювання розпочинається з моменту першого спрацювання датчика положення штока гідроциліндра, яке відбувається після того, як під тиском пального шток переміститься на певну відстань. Таким чином повністю усувається вплив швидкодії керованого клапана на процес вимірювання, а отже, і на точність результату. Це забезпечує кращу то чність пристрою по відношенню до пристрою-про тотип у, котрий має, як зазначалося вище, дода ткові складові похибки вимірювання. Датчик синхронізації виконано як датчик фіксованого положення вала ПНВТ і слугує лише для підрахунк у кількості циклів впорскування N, причому його ви хідний сигнал не перекривається з моментом роботи форсунки, що , як і у прототипу, зменшує по хибк у дискретності відлік у кількості циклів N до найменшої можливої величини в одн у одиницю. Кількість секцій та куто ва характеристика їх спрацьовування не накладають ніяких обмежень на роботу датчика фіксованого положення вала ПНВТ на відміну від прототипу. При виконанні пристрою для вимірювання циклової подачі палива багатоканальним, збільшується лише кількість датчиків положення та входів для них у ЕОМ, що, як правило, не викликає додатко ви х ви тра т п ри стан дар тни х кон фі гур ація х ЕОМ. На фігурі зображено блок-схему пристрою для вимірювання циклової подачі. Пристрій для вимірювання циклової подачі пального складається з ПНВТ 1, який через паливопровід 2 високого тиску з'єдн ується з паливною форсункою 3, встановленою в гермети чн у камеру 4 впорскування, обладнану керованим клапаном 5 для зливання палива з камери 4 впорскування, та з'єднаною з нею вимірювальною камерою 6 у вигляді гідроциліндра, підпружинений шток 7 якого оснащений принаймні двома виступами 8 які взаємодіють із датчиком 9 положення, виходом з'єднаного з ЕОМ 10, котра зв'язана через систему керування 11 з керованим клапаном 5, та датчик 12 фіксованого положення вала ПНВТ 1, ме ханічно зв'язаний з ПНВТ 1 а своїм виходом - з ЕОМ 10, причому у початковому положенні ні один із виступів 8 штока 7 на взаємодіє з да тчиком 9 положен ня, а вихідний сигнал датчика 12 фіксованого положення вала ПНВТ 1 не перекривається у часі з роботою паливної форсунки 3. Пристрій працює так. Паливн ий насос 1 ві д а втономно го при вода (не зображений) виводять на потрібні оберти і вмикають подачу палива насосом. Паливо із секції насоса 1 через паливопровід 2 високого тиску надходи ть до форсунки 3 і впорскується у камеру 4. Оскільки керований клапан 5 увімкнутий, пальне виливається через нього у бак (не зображений). За командою оператора ЕОМ 10 виробляє сигнал для системи керування 11 на закривання керованого клапана 5. Тиск у камері 4 починає зростати, оскільки форсунка 3 продовжує впорскування пального у камеру 4. Під дією тиск у у камері 4 починає переміщува тися шток 7 гідроциліндра 6, долаючи при цьому опір пружини. Через певну кількість циклів перший із виступів 8 штока 7 підходить до датчика 9 положення штока і, взаємодіючи з ним, викликає його спрацьовування. ЕОМ 10 сприймає сигнал датчика 9 положення і, починаючи з цього моменту, підраховує кількість циклів впорскування пального форсункою 3, реагуючи на сигнали датчика 12 фіксованого положення вала ПНВТ 1, котрий механічно зв'язаний з ПНВТ 1. Ме ханічний зв'язок датчика 12 фіксованого положення вала ПНВТ регулюють так, аби його вихідний імпульс вироблявся після закінчення циклу роботи форсунки 3, що зменшує по хибку відліку. Через певну кількість циклів другий із виступів 8 штока 7 гідроциліндра викликає нове спрацьовування датчика 9 положення штока 7. Це означає, що шток 7 перемістився на наперед відому відстань (L) між виступами 8, а загальна кількість пального, яка це спричинила, рівна еталонному об'єму величиною Vo=7tD2L/4, яку ЕОМ 10 може вирахувати навіть заздалегідь. ЕОМ 10 фіксує у пам'яті кількість нарахованих циклів N та видає команду на відкривання керованого клапана 5. Під дією попередньо стиснутої пружини шток 7 переміщується у поча ткове положення, зливаючи пальне з камери 6 через відкритий керований клапан 5 у бак. Через час достатній для переміщення штока 7 у поча ткове положення, цикл вимірювання може повторюва тися. Під час цієї операції ЕОМ 10 може підрахувати циклову подачу, розділивши еталонний об'єм на зафіксоване у пам'яті значення кількості циклів N та вивести це значення на дисплей. Якщо виступів 8 на штокові 7 ли ше два , то це може призвести до непотрібної, з точки зору точності вимірювання, втрати часу при малих циклових подача х, оскільки для заповнення еталонного об'єму потрібно буде значно більше циклів впорскування пального аніж того вимагає точність вимірювання. Для усування цього про тиріччя шток 7 слід о снасти ти дода тковими виступами 8 . При цьому ЕОМ 10 при кожному спрацьовуванні датчика 9 (окрім першого, звичайно) порівнює кількість підрахованих циклів впорскування з мінімально допустимою з точки зору похибки від дискретності. Якщо ця кількість перевищує мінімально допустиму, то цикл переривається достроково, чим до сягається скорочення часу вимірювання. Кожному виступ у 8 на штокові 7 відпо відає свій е талонний 5401 об'єм і ЕОМ оперує тим значенням, яке відповідає виступ у на штокові 7, відслідковуючи кількість спрацьовувань датчика 9 положення штока гідроциліндра. Подальшого спрощення пристрою можна досягн ути тим, що ЕОМ 10 повинна реагува ти не лише на спрацьовування датчика 9 положення а й на його повернення у початковий стан у момент виходу виступу 8 штока 7 із зони спрацьовування датчика 9 положення штока, тобто на кожну зміну його стан у. Ві дстань між точкою спрацьовування та точкою повернення у початковий стан датчика 9 при його взаємодії з одним із виступів 8 буде залежати не тільки від ширини виступу 8 а й від умов навколишнього середовища, перш за все температури. Щоб врахувати ці зміни, ЕОМ 10 у першому циклі вимірювання фіксує кількість циклів впорскування пального як при спрацьовуванні так і при поверненні датчика 9 у початковий стан, однак, циклову подачу пального розраховує як і раніше, лише для моменту повторного спрацьовування датчика 9 від наступного виступу 8 штока 7 гідроциліндра. Тепер ЕОМ 10 може вирахувати еталонний об'єм, який відповідає моменту повернення датчика 9 положення у початковий стан, а саме: Vn=VoNn/N де, як і раніше, позначено: Vo - еталонний об'єм при русі поршня гідроциліндра між виступами 8 штока 7; N - кількість циклів впорскування пального між спрацьовуваннями датчика положення штока. Величина Nn - кількість циклів впорск ування 8 пального форсункою 3 на проміжку часу між спрацьовуванням та поверненням датчика 9 положення штока 7 у початкове положення. У наступному циклі вимірювання ЕОМ 10 уже може оперувати цією величиною як еталонним значенням для моменту повернення датчика 9 у початкове положення та вираховувати циклову подачу, якщо кількість циклів на цей момент перевищує мінімальне значення відповідно до умов точності вимірювання. Робота ЕОМ за таким алгоритмом дозволяє зменшити кількість виступів 8 на штокові 7 при збереженні оптимального часу вимірювання. ЕОМ 10 періодично повторює процедур у визначення величини Vn, врахо вуючи , таким чином, можливі зміни у часі умо в робо ти да тчика 9 положення штока. Датчик 9 положення штока може бути, наприклад, індуктивним, датчик 12 фіксованого положення вала ПНВТ 1 доцільно виконати, наприк ла д, фо тое лек тр и чним і нкрем ен та льним , реперний сигнал якого використано як сигнал фіксованого положення вала ПНВТ а основні сигнали використовуються, наприклад, для вимірювання кутів спрацьовування форсунок. Система керування 11 виконується так як того вимагає керований клапан 5. Наприклад, якщо керований клапан 5 має привід у вигляді електромагніта постійного стр уму, то система керування 11 може бути виконана як транзисторний ключ з використанням, при необхідності, узгодж увального підсилювача для зв'язку з ЕОМ 10. Спеціальних вимог до ЕОМ 10 нема. 11 Система керування Камер а 10 ЕОМ Полив опрОбід Злив Фігу ра Комп'ютерна верстка В. Мацело Підписне Тираж 28 прим. Міністерство осв іт и і науки УкраїниДержавний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП "Український інститут промислов ої в ласності", вул. Глазунов а, 1, м. Київ - 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюApparatus for cycle fuel supply measuring
Автори англійськоюLischuk Vitalii Yevhenovych, Tarasiuk Oleh Mykolaiovych
Назва патенту російськоюУстройство для измерения циклической подачи топлива
Автори російськоюЛищук Виталий Евгеньевич, Тарасюк Олег Николаевич
МПК / Мітки
МПК: F02M 65/00
Мітки: циклової, палива, вимірювання, подачі, пристрій
Код посилання
<a href="https://ua.patents.su/4-5401-pristrijj-dlya-vimiryuvannya-ciklovo-podachi-paliva.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання циклової подачі палива</a>
Пристрій для виключення подачі палива в двигун внутрішнього згорання
Номер патенту: 27120
Опубліковано: 28.02.2000
Автор: Крамарєв Григорій Миколайович
МПК: F02M 3/00
Мітки: двигун, згорання, пристрій, подачі, виключення, внутрішнього, палива
Формула / Реферат:
Пристрій для виключення подачі палива в двигун внутрішнього згоряння, який складається з корпусу, в якому виконаний поздовжній наскрізний отвір і поперечний канал холостого ходу, штока, який встановлений в отворі корпусу і з'єднаний одним кінцем із підпружиненою діафрагмою, що розміщена в камері і ділить останню на герметичну і атмосферну зони, який відрізняється тим, що в нижній частині штока виконаний поздовжній паз.
Система подачі палива рідинної реактивної рушійної установки
Номер патенту: 64015
Опубліковано: 16.02.2004
Автори: Кавелін Сергій Сергійович, Попель Анатолій Михайлович, Драновський Володимир Йосипович, Доброгорський Віктор Антонович, Сергійчук Борис Васильович, Кошкін Михайло Іванович, Борисенко Вячеслав Михайлович, Аніщенко Вячеслав Михайлович
МПК: F02K 9/50
Мітки: реактивної, рідинної, рушійної, подачі, установки, палива, система
Формула / Реферат:
1. Система подачі палива рідинної реактивної рушійної установки, що містить послідовно з'єднані трубопроводами заправний клапан газу, балони з газом, пусковий клапан, редуктор тиску, зворотні клапани, баки окисника і пального з газовою і рідинною порожнинами, паливні клапани, колектори подачі окисника і пального в реактивні двигуни, яка відрізняється тим, що газові порожнини баків окисника і пального з'єднані через перекривальні клапани,...
Пристрій для роздрібнення і подачі твердого палива в топку

Номер патенту: 14789
Опубліковано: 18.02.1997
Автори: Зембіцький Петро Юлійович, Ефімов Георгій Вадимович, Скрипко Валерій Якович, Власюк Анатолій Васильович, Павленко Петро Йосипович, Кучин Генадій Петрович
МПК: F23K 3/00, B02C 18/06
Мітки: твердого, топку, подачі, палива, пристрій, роздрібнення
Формула / Реферат:
Устройство для дробления и подачи твердого топлива, содержащее шнек-питатель, к валу которого присоединена насадка с поперечным и продольными пазами и расположенными на корпусе в шахматном порядке коническими шипами, отличающееся тем, что, с целью упрощения конструкции на конической части насадки выполнены продольные пазы, при этом сумма площадей живых сечений всех пазов равна площади живого сечения насадки.
Пристрій для вимірювання витрат палива в дизельному двигуні
Номер патенту: 5408
Опубліковано: 28.12.1994
Автори: Торчинський Віктор Трохимович, Бортницький Павло Іванович
МПК: G01F 9/00
Мітки: двигуні, витрат, пристрій, вимірювання, дизельному, палива
Формула / Реферат:
(57) Устройство для измерения расхода топлива в дизельном двигателе, содержащее нагнетательную линию, включающую последовательно соединенные топливный бак, датчик расхода, насос высокого давления и вход форсунки, возвратную линию, соединенную с выходом форсунки и включающую первый вход и первый выход измерительной топливной камеры, а также счетчик, отличающееся тем, что в него введен поплавок с закрепленным на нем замыкателем, измерительная...
Пристрій подачі палива та повітря до камер згоряння газотурбінного двигуна
Номер патенту: 21651
Опубліковано: 20.01.1998
Автор: Рахмаілов Анатолій Міхайловіч
Мітки: камер, згоряння, палива, повітря, пристрій, двигуна, подачі, газотурбінного
Формула / Реферат:
1. Устройство подачи топлива и воздуха в камеры сгорания газотурбинного двигателя, закрепленные на роторе турбины, содержащее крыльчатку с венцом лопастей, образующих межлопастные полости подачи воздуха в упомянутые камеры сгорания, а также каналы подачи топлива, сообщенные с форсуночными устройствами камер сгорания, отличающееся тем, что крыльчатка подачи воздуха выполнена центростремительной, жестко скреплена с ротором турбины и...
Попередній патент: Пропарювальна камера для пиломатеріалів
Наступний патент: Спосіб підвищення резистентності твердих тканин зубів та пародонта у дітей під час лікування зубощелепних аномалій знімними ортодонтичними апаратами
Випадковий патент: Огорожа для тварин