Спосіб зменшення динамічних навантажень при обмеженні розгойдування підвішених на канаті вантажів, що переміщаються
Номер патенту: 55894
Опубліковано: 27.12.2010
Автори: Панкратов Анатолій Іванович, Залятов Артем Фаритович
Формула / Реферат
Спосіб зменшення динамічних навантажень при обмеженні розгойдування підвішених на канаті вантажів, що полягає в послідовному розгоні механізму пересування з підвішеним вантажем, який відрізняється тим, що послідовно впливають на двох інтервалах часу силами, що змінюються по напівсинусоїдах і визначаються за формулою
![]() ,
,
де ![]() ,
, ![]() - основні сили на першому й другому інтервалах часу відповідно;
- основні сили на першому й другому інтервалах часу відповідно;
![]() - маса вантажу;
- маса вантажу;
![]() - наведена маса механізму пересування;
- наведена маса механізму пересування;
![]() - початкова швидкість механізму пересування при розгоні або гальмуванні;
- початкова швидкість механізму пересування при розгоні або гальмуванні;
![]() - кінцева швидкість механізму пересування при розгоні або гальмуванні;
- кінцева швидкість механізму пересування при розгоні або гальмуванні;
![]() - поточний час від початку перехідних процесів,
- поточний час від початку перехідних процесів,
а перший і другий часові інтервали Т визначають за формулою
 ,
,
де ![]() - довжина каната;
- довжина каната;
g - прискорення вільного падіння.
Текст
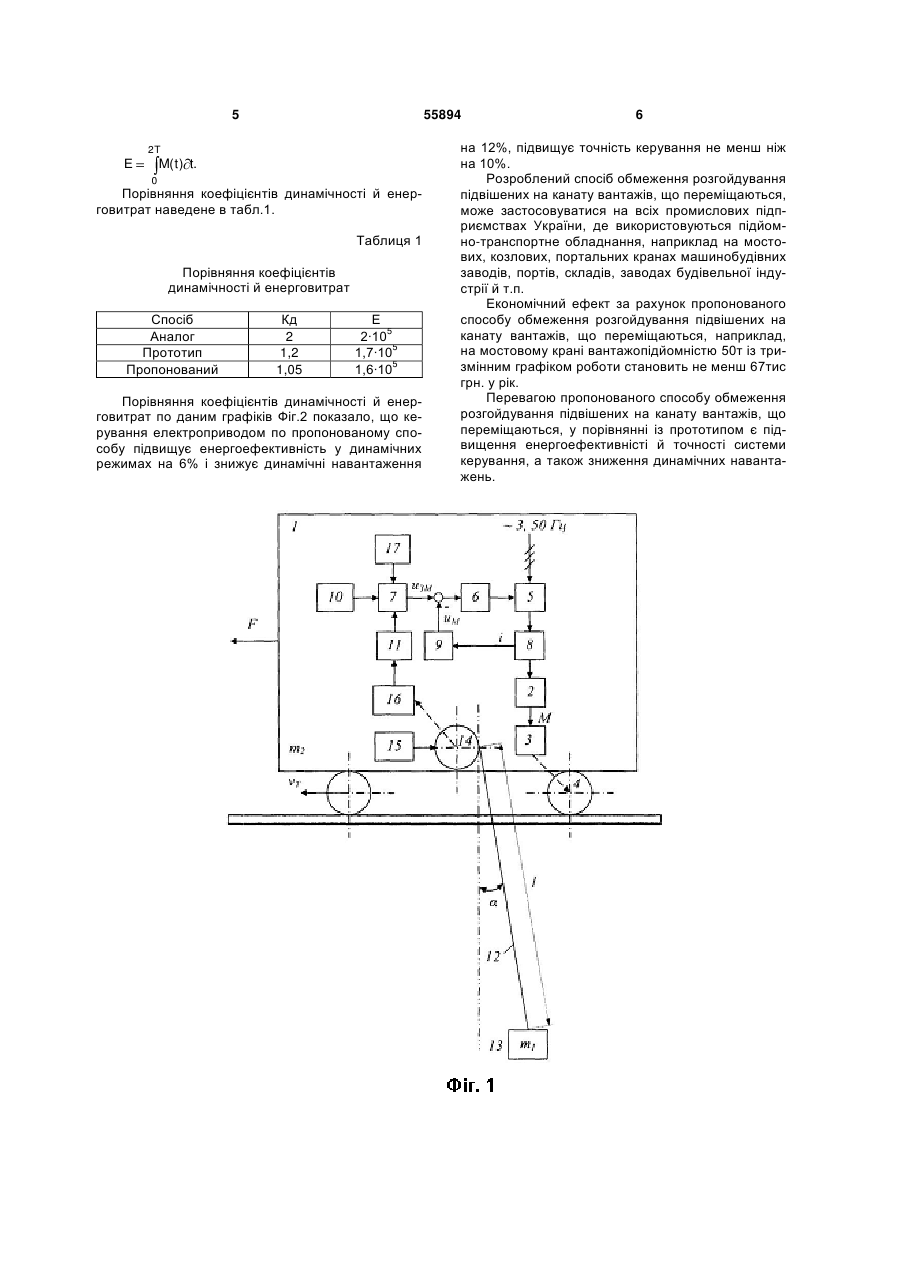
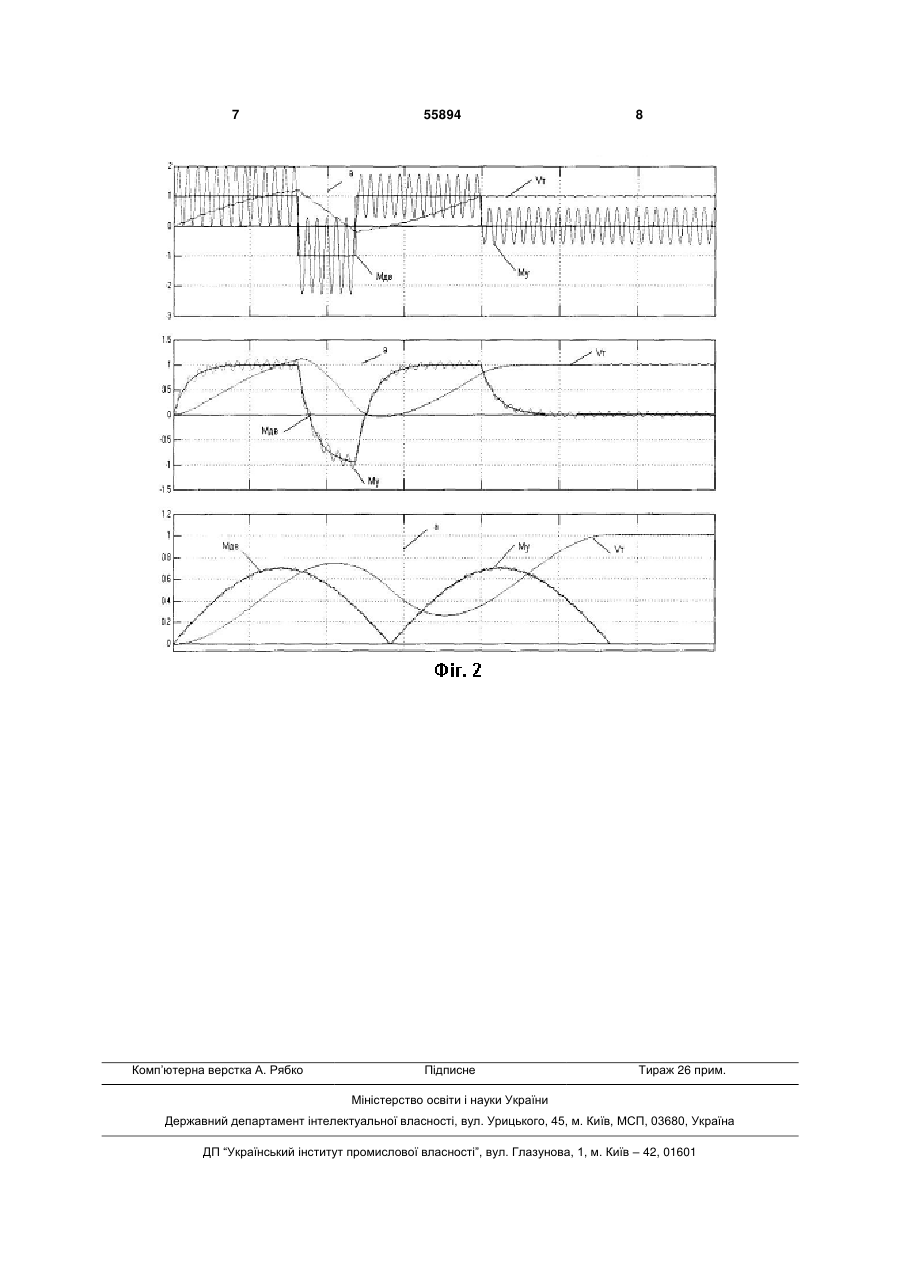
Спосіб зменшення динамічних навантажень при обмеженні розгойдування підвішених на канаті вантажів, що полягає в послідовному розгоні механізму пересування з підвішеним вантажем, який відрізняється тим, що послідовно впливають на двох інтервалах часу силами, що змінюються по напівсинусоїдах і визначаються за формулою ( t t 1) F1 F2 (m1 m 2 ) 2 sign sin( ) sin( ) , T T 2 де F1 , F2 - основні сили на першому й другому інтервалах часу відповідно; m1 - маса вантажу; m2 - наведена маса механізму пересування; 1 - початкова швидкість механізму пересування при розгоні або гальмуванні; 2 - кінцева швидкість механізму пересування при розгоні або гальмуванні; t - поточний час від початку перехідних процесів, а перший і другий часові інтервали Т визначають за формулою 2 T , g(m1 m 2 ) l m1 (11) UA Відомий спосіб керування механізмом пересування підвішеного на канаті вантажу, згідно з яким здійснюється послідовно розгін механізму пересування з підвішеним вантажем на трьох часових інтервалах від початкової швидкості до заданої кінцевої швидкості, інтервали визначені за допомогою принципу максимуму Понтрягіна та на цих інтервалах на механізм пересування впливають основною силою, що змінюється по експоненті (див., наприклад, Найденко С.В. Керування електроприводом механізмів горизонтального переміщення з підвішеним вантажем. Одеса). Загальними суттєвими ознаками відомого способу й того, що заявляється є послідовний розгін механізму пересування з підвішеним вантажем. В основу корисної моделі поставлена задачу створення такого способу обмеження розгойдування підвішених на канату вантажів, що переміщаються, який би забезпечував зменшення динамічних навантажень у кінематичних ланцюгах і підвищував енергоефективність і точність системи (19) Спосіб відноситься до галузі техніки, а саме до підйомно-транспортного обладнання, а саме до способів демпфування коливань вантажу при переміщенні їх підйомно-транспортними засобами, і може бути використаний для керування механізмами пересування з підвішеними на канаті вантажами. Відомий спосіб керування механізмом пересування підвішеного на канаті вантажу, згідно з яким здійснюється послідовно розгін механізму пересування на трьох часових інтервалах від початкової швидкості до заданої кінцевої швидкості, перший і третій часові інтервали рівні один іншому, і на цих інтервалах на механізм пересування впливають основною силою. Недоліками даного способу є виникнення неприпустимих динамічних навантажень у кінематичних ланцюгах, відсутність енергоефективності та адаптації системи керування переміщенням до зміни довжини канату (див., наприклад, патент SU 1047102 "Спосіб керування механізмом пересування підвішеного на канату вантажу"). 55894 (13) де l - довжина каната; g - прискорення вільного падіння. U 1 3 керування переміщенням за рахунок її адаптації до змін довжини канату. Поставлена задача вирішується тим, що в способі обмеження розгойдування підвішених на канату вантажів, що переміщаються, при розгоні послідовно впливають на двох інтервалах часу силами, що змінюються по напівсинусоїдах і визначені за формулою ( 1 ) sign sin( t ) sin( t ) , F1 F2 (m1 m 2 ) 2 T T де F1 , F2 - основні сили на першому й другому інтервалах часу відповідно; m1 - маса вантажу; m2 - наведена маса механізму пересування; 1 - початкова швидкість механізму пересування при розгоні або гальмуванні; 2 - кінцева швидкість механізму пересування при розгоні або гальмуванні; t - поточний час від початку перехідних процесів, а перший і другий часові інтервали Т, визначають по формулі 2 , T g(m1 m 2 l m1 де l - довжина канату; g - прискорення вільного падіння. Послідовний вплив на двох інтервалах часу силами F1 F2 , що змінюються по напівсинусоїдах дає можливість зменшити динамічні навантаження в кінематичних ланцюгах і підвищити енергоефективність керування переміщенням. Визначення першого та другого часових інтервалів Т дає можливість адаптації системи керування до змін довжини канату, отже підвищити точність керування переміщенням вантажу. У цілому пропонований спосіб дозволяє в порівнянні із прототипом розширити функціональні можливості й за рахунок цього підвищити енергоефективність керування переміщенням у динамічних режимах на 6% та знизити динамічні навантаження не менш ніж на 12%, підвищити точність керування не менш ніж на 10%. Застосування в сукупності операцій послідовного впливу на двох інтервалах часу силами, що змінюються по напівсинусоїдах, визначення першого й другого тимчасових інтервалів дає можливість зменшити динамічні навантаження в кінематичних ланцюгах, підвищити енергоефективність і точність керування переміщенням вантажу. Спосіб реалізується наступним чином. На Фіг.1 наведена функціональна схема системи керування моментом привода переміщення підвішеного на канату вантажу. Візок 1 масою m2 переміщається горизонтально під дією сили F, яка створюється за рахунок обертаючого моменту М на валу двигуна 2, підключеного через редуктор 3 до колісної пари 4 механізму пересування візка 1. Двигун 2 одержує живлення з мережі змінного трифазного струму через перетворювач 5 частоти, який управляється регулятором 6 моменту М. На прямий вхід регуля 55894 4 тора 6 моменту подається сигнал uЗМ - завдання моменту з виходу задатчика 7 моменту, на інверсний вхід регулятора 6 моменту подасться сигнал uМ з виходу датчика 8 струму через блок 9 визначення моменту М. Па перший вхід задатчика 7 моменту подається сигнал з виходу регулятора 10 швидкості, на другий вхід задатчика 7 моменту подається сигнал з виходу блоку 11 визначення довжини І канату 12. Вантаж 13 масою m1 переміщається вертикально за допомогою барабана 14 лебідки механізму підйому, який приводиться в рух за допомогою двигуна 15 підйому. Поворот вала барабана 14 контролюється датчиком кута повороту 16, підключеного входом до вала барабана 14, а виходом - до входу блоку 11 визначення довжини І. До третього входу задатчика 7 моменту підключений таймер 17. При розгоні й гальмуванні сигнал завдання швидкості змінюється програмно гак, щоб сила, що діє на візок на двох тимчасових інтервалах змінювалася за законом t t 1) sign sin( sin( ). T T) T Точне значення напівсинусоїдальної форми сили F підтримується регулятором 6 моменту (пряме керування моментом) за рахунок зворотного зв'язку по моменту, формованій датчиком 8 струму й блоку 9 визначення моменту М. Значення інтервалів часу Т безупинно коректуються регулятором 6 моменту за рахунок зворотного зв'язку по довжині І канату, формованої за допомогою датчика 16 кута повороту й блоку 11 визначення довжини І канату 12. Відлік часових інтервалів Т проводиться за допомогою таймера 17. На Фіг.2 наведені графіки зміни обертаючого моменту двигуна MДВ ( t ) , швидкості пересування F F1 F2 (m1 m) ( 2 візка Т ( t ) , пружного динамічного моменту MУ ( t ) , отриманих моделюванням перехідних процесів при розгоні візка l із системами керування, у яких обмеження розгойдування підвішених на канату вантажів, що переміщаються, здійснюються по аналогу, прототипу та пропонованому способу. У моделі електромеханічної системи пересування візка з вантажем, підвішеним на канату враховувалося сухе тертя в колісних парах люфти в редукторі й пружні зв'язки в кінематичних ланцюгах. Динамічні навантаження оцінювалися коефіцієнтом динамічності ММАХ KД , МУСТ де ММАХ - максимальне значення динамічного моменту; МУСТ - значення, що встановилося, моменту двигуна. Енергоефективність керування розгоном візка оцінювався коефіцієнтом пропорційним енерговитратам у динамічних режимах 5 55894 2T Е M( t ) t. 0 Порівняння коефіцієнтів динамічності й енерговитрат наведене в табл.1. Таблиця 1 Порівняння коефіцієнтів динамічності й енерговитрат Спосіб Аналог Прототип Пропонований Кд 2 1,2 1,05 Е 2·105 1,7·105 1,6·105 Порівняння коефіцієнтів динамічності й енерговитрат по даним графіків Фіг.2 показало, що керування електроприводом по пропонованому способу підвищує енергоефективність у динамічних режимах на 6% і знижує динамічні навантаження 6 на 12%, підвищує точність керування не менш ніж на 10%. Розроблений спосіб обмеження розгойдування підвішених на канату вантажів, що переміщаються, може застосовуватися на всіх промислових підприємствах України, де використовуються підйомно-транспортне обладнання, наприклад на мостових, козлових, портальних кранах машинобудівних заводів, портів, складів, заводах будівельної індустрії й т.п. Економічний ефект за рахунок пропонованого способу обмеження розгойдування підвішених на канату вантажів, що переміщаються, наприклад, на мостовому крані вантажопідйомністю 50т із тризмінним графіком роботи становить не менш 67тис грн. у рік. Перевагою пропонованого способу обмеження розгойдування підвішених на канату вантажів, що переміщаються, у порівнянні із прототипом є підвищення енергоефективністі й точності системи керування, а також зниження динамічних навантажень. 7 Комп’ютерна верстка А. Рябко 55894 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of reducing dynamic loads while limiting swinging of loads suspended on rope
Автори англійськоюPankratov Anatolii Ivanovych, Zaliatov Artem Farytovych
Назва патенту російськоюСпособ уменьшения динамических нагрузок при ограничении раскачки подвешенных на канате перемещаемых грузов
Автори російськоюПанкратов Анатолий Иванович, Залятов Артем Фаритович
МПК / Мітки
МПК: B66C 13/00
Мітки: канаті, динамічних, розгойдування, підвішених, спосіб, обмеженні, вантажів, зменшення, навантажень, переміщаються
Код посилання
<a href="https://ua.patents.su/4-55894-sposib-zmenshennya-dinamichnikh-navantazhen-pri-obmezhenni-rozgojjduvannya-pidvishenikh-na-kanati-vantazhiv-shho-peremishhayutsya.html" target="_blank" rel="follow" title="База патентів України">Спосіб зменшення динамічних навантажень при обмеженні розгойдування підвішених на канаті вантажів, що переміщаються</a>
Пристрій для зменшення розгойдування вантажу при пуску та гальмуванні
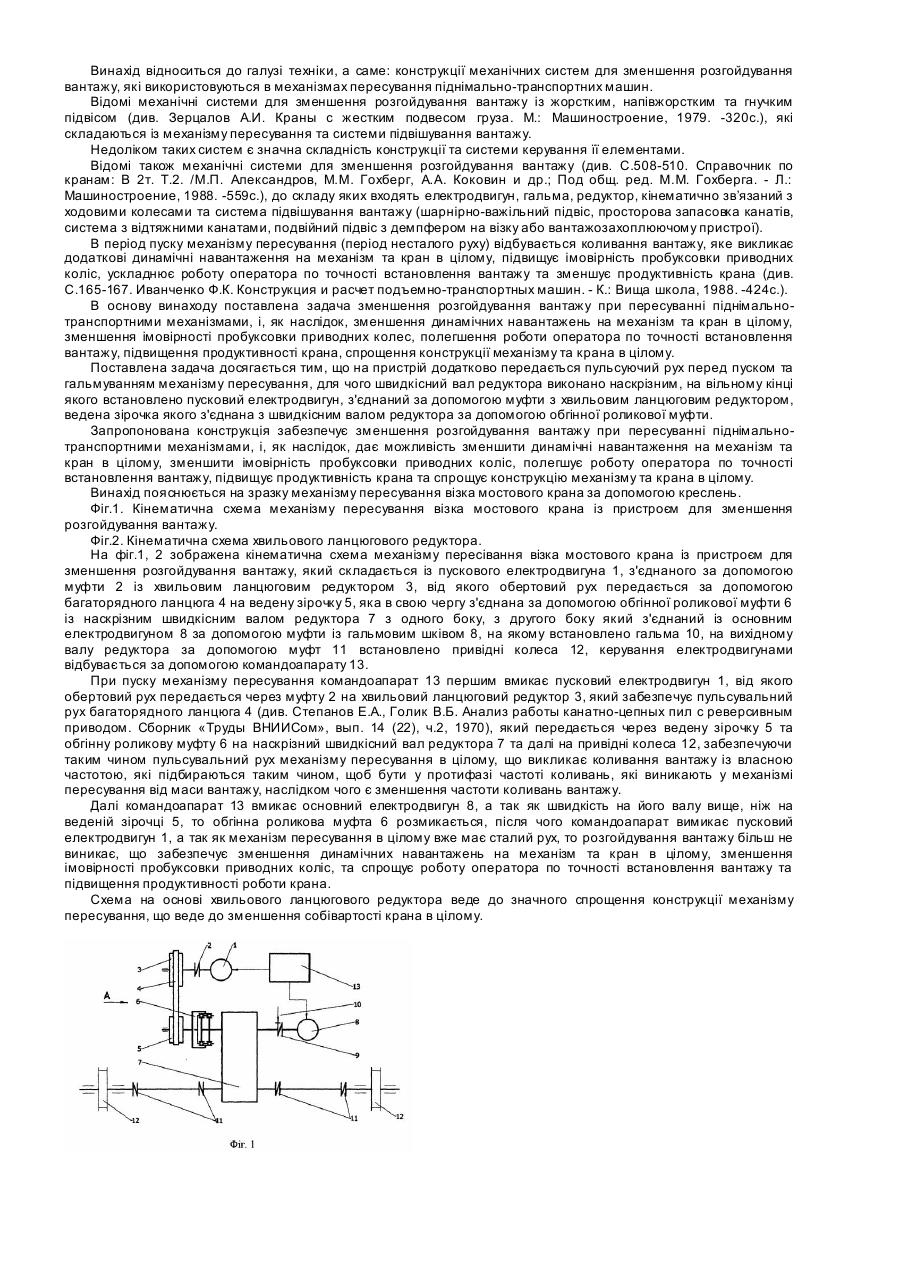
Номер патенту: 67476
Опубліковано: 15.06.2004
Автори: Дорохов Микола Юрійович, Крупко Валерій Григорович
МПК: B66D 5/00, F16G 13/00
Мітки: зменшення, гальмуванні, пуску, пристрій, розгойдування, вантажу
Формула / Реферат:
Пристрій для зменшення розгойдування вантажу при пуску та гальмуванні, до складу якого входять електродвигун, гальма, редуктор, кінематично зв'язаний з ходовими колесами та системи підвішування вантажу, який відрізняється тим, що для додаткової передачі пульсуючого руху перед пуском та гальмуванням механізму пересування швидкісний вал редуктора виконано наскрізним, на вільному кінці вала встановлено пусковий електродвигун, з'єднаний за...
Пристрій для зменшення розгойдування вантажу
Номер патенту: 13469
Опубліковано: 17.04.2006
Автор: Дорохов Микола Юрійович
МПК: F16G 13/00
Мітки: розгойдування, зменшення, вантажу, пристрій
Формула / Реферат:
Пристрій для зменшення розгойдування вантажу, що містить електродвигун, гальма, редуктор, кінематично зв'язаний з ходовими колесами, та систему підвішування вантажу, швидкісний вал редуктора виконано наскрізним, на вільному кінці якого встановлено пусковий електродвигун, з'єднаний за допомогою муфти з хвильовим ланцюговим редуктором, ведена зірочка якого з'єднана із швидкісним валом редуктора за допомогою обгінної роликової муфти, який...
Саморегулювальний пристрій для зменшення динамічних навантажень вантажопідйомного механізму

Номер патенту: 53198
Опубліковано: 27.09.2010
Автори: Чернишенко Олександр В'ячеславович, Подоляк Олег Степанович, Ісьєміні Ілля Ігорович
МПК: B66C 1/00
Мітки: пристрій, навантажень, зменшення, вантажопідйомного, механізму, саморегулювальний, динамічних
Формула / Реферат:
Гідравлічний демпфер, який містить корпус, поршень, пружину, який відрізняється тим, що в корпусі на довжину ходу поршня виконані криволінійна та прямолінійна напрямні, до верхньої його кришки одним своїм кінцем жорстко закріплена пружина, а іншим кінцем вона закріплена до поршня, що складається з двох елементів, які мають чотири співвісні отвори, а в нижній його кришці закріплений гак.
Спосіб визначення характеристик чутливості вибухових речовин до динамічних навантажень
Номер патенту: 75238
Опубліковано: 15.03.2006
Автор: Петренко Олександр Васильович
МПК: G01N 33/22
Мітки: характеристик, спосіб, навантажень, речовин, вибухових, динамічних, визначення, чутливості
Формула / Реферат:
1. Спосіб визначення характеристик чутливості вибухових речовин до динамічних навантажень, що включає розміщення вибухової речовини між торцями двох роликів, навантаження постійним тиском, прикладання до неї динамічного навантаження, поступове збільшення його величини та фіксацію величини динамічного навантаження, котре збуджує вибух, який відрізняється тим, що динамічне навантаження здійснюють за гармонічним законом при ряді фіксованих...
Спосіб зниження динамічних навантажень в насосному комплексі з керованою арматурою
Номер патенту: 52073
Опубліковано: 10.08.2010
Автори: Коренькова Тетяна Валеріївна, Родькін Дмитро Йосипович, Кравець Олексій Михайлович
МПК: F04D 27/00
Мітки: навантажень, арматурою, керованою, спосіб, комплекси, зниження, динамічних, насосному
Формула / Реферат:
1. Спосіб зниження динамічних навантажень в насосному комплексі з керованою арматурою, що полягає у формуванні нерівномірного темпу закриття запірно-регулюючої засувки за допомогою нерегульованого асинхронного електроприводу з кількома швидкостями обертання, який відрізняється тим, що до нерегульованого асинхронного електропривода засувки додатково підключають перетворювач частоти і зовнішнє джерело резервного живлення, при раптовому...
Попередній патент: Пристрій для водно-повітряного охолодження виробів
Наступний патент: Зворотний циліндр гідравлічного преса
Випадковий патент: Спосіб артроскопічного лікувального впливу на порожнину суглобів