Спосіб автоматичного керування позиційною електромеханічною системою
Номер патенту: 55903
Опубліковано: 27.12.2010
Автори: Побочій Володимир Григорович, Панкратов Анатолій Іванович
Формула / Реферат
Спосіб автоматичного керування позиційною електромеханічною системою, що включає керування по відхиленню від завдання й визначення поточних значень змінних стану електромеханічної системи, подачі n отриманих сигналів на n входів нейронної мережі, помноженню кожного з них на коефіцієнти ваги, який відрізняється тим, що додатково по кожній із змінних стану у блоці фазифікації фазі-контролера формують функції приналежностей, які перетворюють в змінні вагові коефіцієнти фазі-правил, сума яких у будь-який момент часу дорівнює одиниці, за цими правилами формують вектори компенсуючих впливів, які перемножують з відповідними коригувальними сигналами, сформованими штучною нейронною мережею, що розпізнає стан об'єкта керування по нормованій вихідній координаті і її інверсії, а результати перемножування підсумовуютьй використовують для загальної корекції сигналу відхилення положення від завдання.
Текст
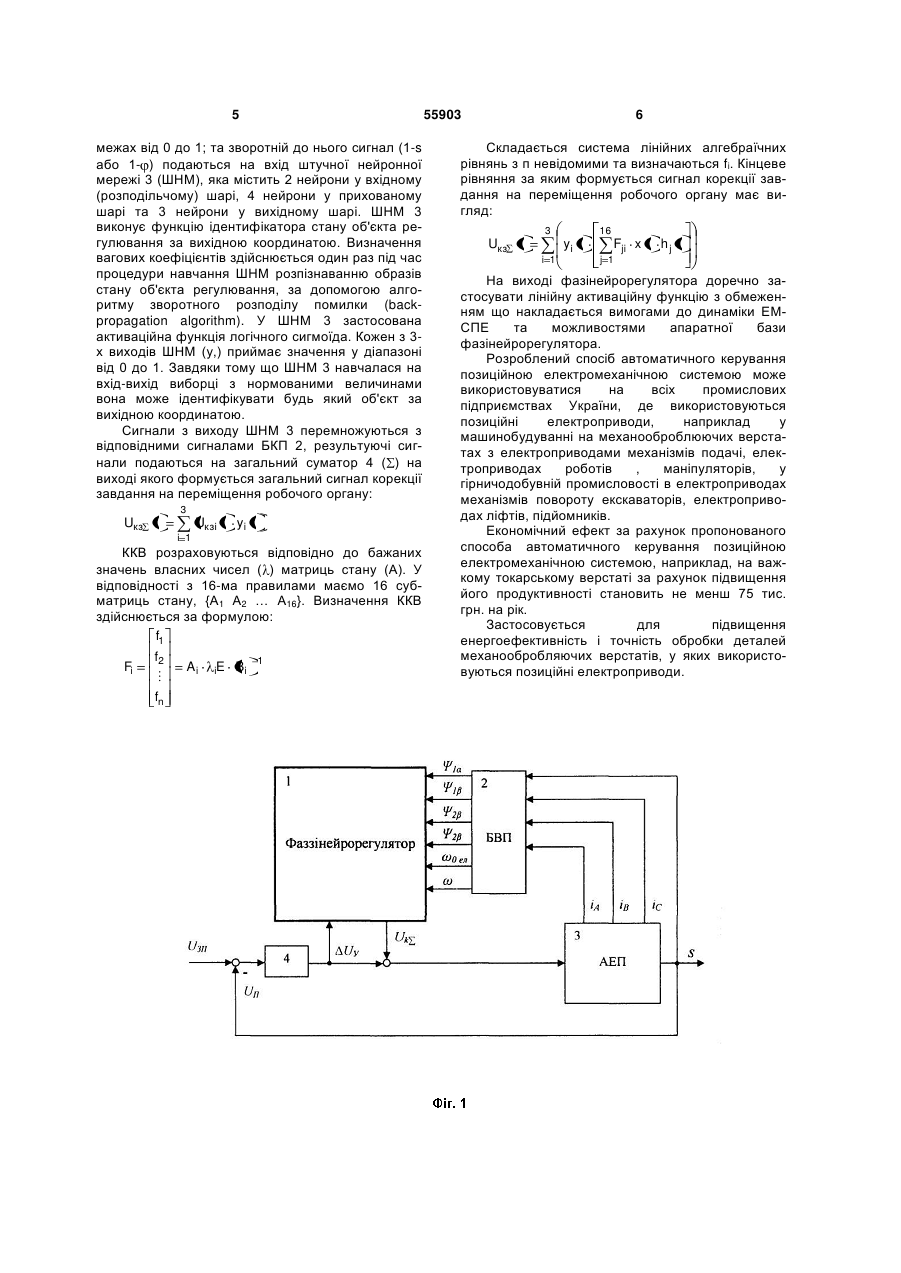
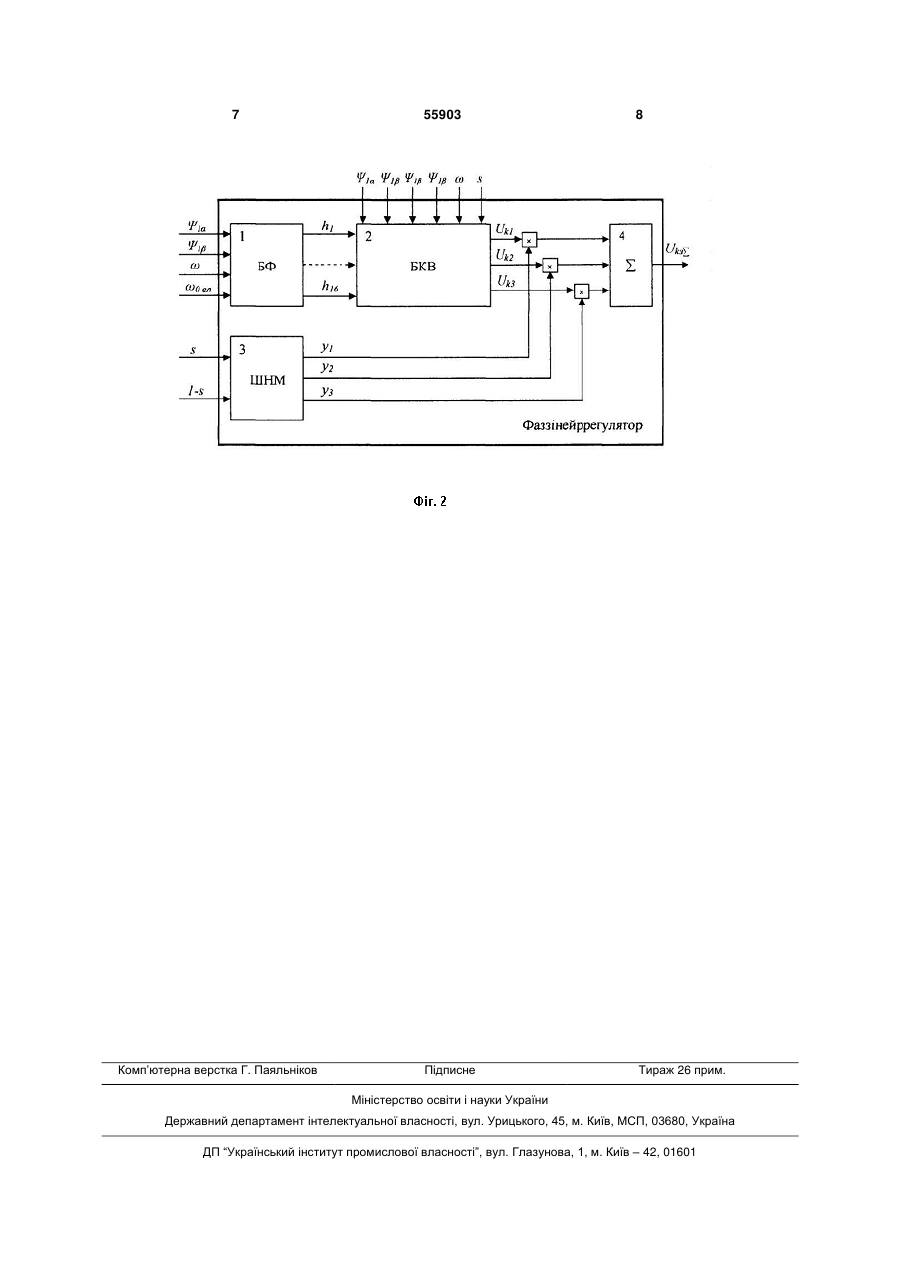
Спосіб автоматичного керування позиційною електромеханічною системою, що включає керування по відхиленню від завдання й визначення поточних значень змінних стану електромеханічної системи, подачі n отриманих сигналів на n входів нейронної мережі, помноженню кожного з них на 3 Формування функцій приналежностей, які перетворяться в змінні вагові коефіцієнти фазіправил, сума яких у будь-який момент часу дорівнює одиниці, дає можливість формувати вектори компенсуючих впливів, на сигнал відхилення положення від завдання в динамічних режимах, що істотно підвищує для заданої швидкодії енергоефективність системи керування. Формування коригувальних сигналів штучною нейронною мережею дає можливість підвищити точність регулювання положення за рахунок адаптації системи керування до будь-яких експлуатаційних варіацій параметрів електропривода тому що нейронна мережа розпізнає будь-яку зміну стану об'єкта керування по нормованій вихідній координаті і її інверсії. Перемножування векторів компенсуючи впливів, фазі-регулятора з відповідними коригувальними сигналами сформованими штучною нейронною мережею й підсумовування результатів перемножування забезпечує можливість загальної корекції сигналу відхилення положення від завдання в динамічних режимах, підвищити для заданої швидкодії енергоефективність і точність керування. У цілому пропонований спосіб дозволяє в порівнянні із прототипом розширити функціональні можливості й за рахунок цього підвищити енергоефективність, наприклад, механообробляючих верстатів по даним експериментально отриманих динамічних навантажувальних діаграм не менш ніж на 10 %, а точність не менш ніж на порядок. Застосування в сукупності операцій формування у фазі-контролері функцій приналежностей, які перетворюються в змінні вагові коефіцієнти фазі-правил, сума яких у будь-який момент часу дорівнює одиниці, формування по них векторів компенсуючи впливів, формування коригувальних сигналів штучною нейронною мережею, що розпізнає стан об'єкта керування по нормованій вихідній координаті і її інверсії, перемножування коригувальних сигналів фазі-контролера й штучної нейроної мережі, підсумовування результатів перемножування й використання отриманого сигналу для загальної корекції відхилення положення від завдання, дозволило забезпечити нові функції підвищення для заданої швидкодії енергоефективності не менш ніж на 10 %, а точності регулювання положення не менш ніж на порядок. Підвищення енергоефективності керування дає можливість економії витрати електричної енергії при обробці деталей на 10 %, а підвищення точності позиціювання на порядок дає можливість підвищення точності обробки деталей на механообробляючих верстатах не менш ніж на два класи, що дає підвищення конкурентоспроможності верстатів і виготовлених з деталей машин. Отже, пропоноване рішення відповідає критерію «винахідницький рівень». Спосіб реалізується таким чином. На фіг. 1 представлена функціональна схема структурна схема електромеханічної системи позиційного електропривода (ЕМСПЕ) із фазінейрорегулятором 1. 55903 4 На вхід фазінейрорегулятора 1 з виходу блока 2 визначення параметрів (БВП) автоматизованого електропривода 3 (АЕП) подаються розраховані по фазним струмам іА, іВ, іС асинхронного двигуна (АД) параметри електропривода: кутова швидкість обертання валу двигуна (робочого органу, ), кутова швидкість обертання магнітного поля статора АД ( 0ел) проекції потокозчеплення на осі координат - статора АД ( 1 , 1 ) та ротора ( 2 , 2 ). На виході фазінейрорегулятора 1 формується загальний корегуючий сигнал Uk , який складається з сигналом з виходу регулятора положення 4, який пропорційний сигналу U , пропорційному відхиленню положення s від завдвння UЗП. На фіг. 2 представлена функціональна схема фазінейрорегулятора. Принцип дії фазінейрорегулятора полягає в наступному. Сигнали змінних стану об'єкта регулювання подаються на блок 1 фазифікації (БФ) який містить функції належності вхідних змінних що формують 16 фазі правил. Функції належності описуються наступними рівняннями: z1 t min z2 t 0min z3 t 1 min 1 z4 t 1 min 1 1 x 1 t 1 1 0 1 1 x 2 xt 0 max t t 0max t 1 1 2 t 2 1 max 1 max 0 0 2 1 2 t 1 t 1 1 t xt де min, mах - мінімальна та максимальна кутова швидкість обертання вала двигуна; 0min, - мінімальна та максимальна кутова 0mах швидкість обертання магнітного поля статора двигуна; 1 min, 1 min, 1 max, 1 max - мінімальні та максимальні значення проекцій потокозчеплення статора; x 1 , x 2 - функції належності змінних ста ну, x= , 0, 1a, 1 . Блок 1 БФ здійснює перетворення взаємодії вхідних змінних у змінні вагові коефіцієнти фазі правил. Характерною ознакою БФ є те що сума вагових коефіцієнтів фазі правил у будь який проміжок часу дорівнює 1. r Rt hi t 1 i 1 де r - кількість фазі правил, r=16; hi - ваговий коефіцієнт і-го правила. Сигнали вагових коефіцієнтів фазі правил та сигнали вхідних змінних: , 0ел, 1 . 1 , 2 , 2 подаються на блок 2 компенсуючи впливів (БКП), який містить 3 вектори коефіцієнтів компенсуючи впливів (ККВ): F1, F2, F3 , розмір яких залежить від кількості змінних стану що беруть участь у формуванні компенсую чого впливу, Fi f1 f2... fn . На виході БКП формуються 3 часткові сигнали корекції завдання на переміщення: Uk1, Uk2, Uk3. Одночасно сигнал про значення вихідної координати об'єкта регулювання (переміщення робочого органу, s, або кут повороту ротора АД, ) разраховувається у блоці 2 (фіг. 1) і нормується в 5 межах від 0 до 1; та зворотній до нього сигнал (1-s або 1- ) подаються на вхід штучної нейронної мережі 3 (ШНМ), яка містить 2 нейрони у вхідному (розподільчому) шарі, 4 нейрони у прихованому шарі та 3 нейрони у вихідному шарі. ШНМ 3 виконує функцію ідентифікатора стану об'єкта регулювання за вихідною координатою. Визначення вагових коефіцієнтів здійснюється один раз під час процедури навчання ШНМ розпізнаванню образів стану об'єкта регулювання, за допомогою алгоритму зворотного розподілу помилки (backpropagation algorithm). У ШНМ 3 застосована активаційна функція логічного сигмоїда. Кожен з 3х виходів ШНМ (у,) приймає значення у діапазоні від 0 до 1. Завдяки тому що ШНМ 3 навчалася на вхід-вихід виборці з нормованими величинами вона може ідентифікувати будь який об'єкт за вихідною координатою. Сигнали з виходу ШНМ 3 перемножуються з відповідними сигналами БКП 2, результуючі сигнали подаються на загальний суматор 4 ( ) на виході якого формується загальний сигнал корекції завдання на переміщення робочого органу: 3 Uкз t Uкзі t yi t i 1 ККВ розраховуються відповідно до бажаних значень власних чисел ( ) матриць стану (А). У відповідності з 16-ма правилами маємо 16 субматриць стану, {А1 А2 … А16}. Визначення ККВ здійснюється за формулою: f1 f2 Fi A i iE Bi 1 fn 55903 6 Складається система лінійних алгебраїчних рівнянь з п невідомими та визначаються fi. Кінцеве рівняння за яким формується сигнал корекції завдання на переміщення робочого органу має вигляд: 3 Uкз t 16 yі t i 1 Fji x t h j t j 1 На виході фазінейрорегулятора доречно застосувати лінійну активаційну функцію з обмеженням що накладається вимогами до динаміки ЕМСПЕ та можливостями апаратної бази фазінейрорегулятора. Розроблений спосіб автоматичного керування позиційною електромеханічною системою може використовуватися на всіх промислових підприємствах України, де використовуються позиційні електроприводи, наприклад у машинобудуванні на механооброблюючих верстатах з електроприводами механізмів подачі, електроприводах роботів , маніпуляторів, у гірничодобувній промисловості в електроприводах механізмів повороту екскаваторів, електроприводах ліфтів, підйомників. Економічний ефект за рахунок пропонованого способа автоматичного керування позиційною електромеханічною системою, наприклад, на важкому токарському верстаті за рахунок підвищення його продуктивності становить не менш 75 тис. грн. на рік. Застосовується для підвищення енергоефективність і точність обробки деталей механообробляючих верстатів, у яких використовуються позиційні електроприводи. 7 Комп’ютерна верстка Г. Паяльніков 55903 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomatic comtrol method with a positional electromechanical system
Автори англійськоюPankratov Anatolii Ivanovych, Pobochii Volodymyr Hryhorovych
Назва патенту російськоюСпособ автоматического управления позиционной электромеханической системой
Автори російськоюПанкратов Анатолий Иванович, Побочий Владимир Григорьевич
МПК / Мітки
МПК: G05B 11/00
Мітки: спосіб, керування, системою, позиційною, автоматичного, електромеханічною
Код посилання
<a href="https://ua.patents.su/4-55903-sposib-avtomatichnogo-keruvannya-pozicijjnoyu-elektromekhanichnoyu-sistemoyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного керування позиційною електромеханічною системою</a>
Спосіб автоматичного керування процесом згущення відходів флотації та освітлення шламових вод
Номер патенту: 54394
Опубліковано: 10.11.2010
Автори: Ульшин Віталій Олександрович, Письменський Олексій В'ячеславович
МПК: B03B 13/00
Мітки: автоматичного, керування, вод, процесом, освітлення, відходів, шламових, згущення, флотації, спосіб
Формула / Реферат:
Спосіб автоматичного керування процесом згущення відходів флотації та освітлення шламових вод, який полягає в тому, що підтримують задані значення вмісту твердої фази у зливі та згущеному продукті з компенсацією коливання навантаження вихідної пульпи зміною витрат флокулянту, який відрізняється тим, що додатково стабілізують рівень осаду, витрати флокулянту розраховують з врахуванням зворотного зв'язку за вмістом твердої фази у зливі,...
Дорожня розмітка для автоматичного керування рухом транспортних засобів та спосіб автоматичного керування рухом
Номер патенту: 80389
Опубліковано: 25.09.2007
Автори: Сніцарук Леонід Адамович, Тюлькін Сергій Павлович
МПК: G08G 1/00, G06G 7/78, E01C 9/00
Мітки: засобів, автоматичного, рухом, транспортних, керування, розмітка, дорожня, спосіб
Формула / Реферат:
1. Дорожня розмітка для автоматичного керування рухом транспортного засобу, що складається з ліній, нанесених кольоровим матеріалом на проїзну частину дороги, яка відрізняється тим, що вона містить додаткові лінії дорожньої розмітки, в яких вздовж напрямку руху транспортних засобів за заданим законом чергуються ділянки ліній з високою та низькою електропровідністю з можливістю одержання інформації від індуктивних давачів, встановлених на...
Спосіб керування системою електронної гри
Номер патенту: 6591
Опубліковано: 16.05.2005
Автор: Максимов Кирило Андрійович
МПК: A63F 9/24, G06Q 99/00
Мітки: керування, системою, електронної, спосіб, гри
Формула / Реферат:
Спосіб керування системою електронної гри з використанням засобів безпровідного зв'язку, що включає операції формування бази ігорних програм, формування кодів ідентифікації для кожної ігорної програми і користувача-гравця, кодування грошових ставок для кожної гри, кодування коштів на розрахунковому рахунку користувача, обробки даних у вигляді кодів про виконання ігорної програми, визначення коду переможця з наступною передачею кодів переможця...
Спосіб автоматичного керування процесом осадження твердої фази
Номер патенту: 65879
Опубліковано: 15.04.2004
Автори: Білецький Володимир Стефанович, Шпильовий Леонід Вікторович
МПК: B01D 21/00
Мітки: керування, фазі, осадження, автоматичного, процесом, твердої, спосіб
Формула / Реферат:
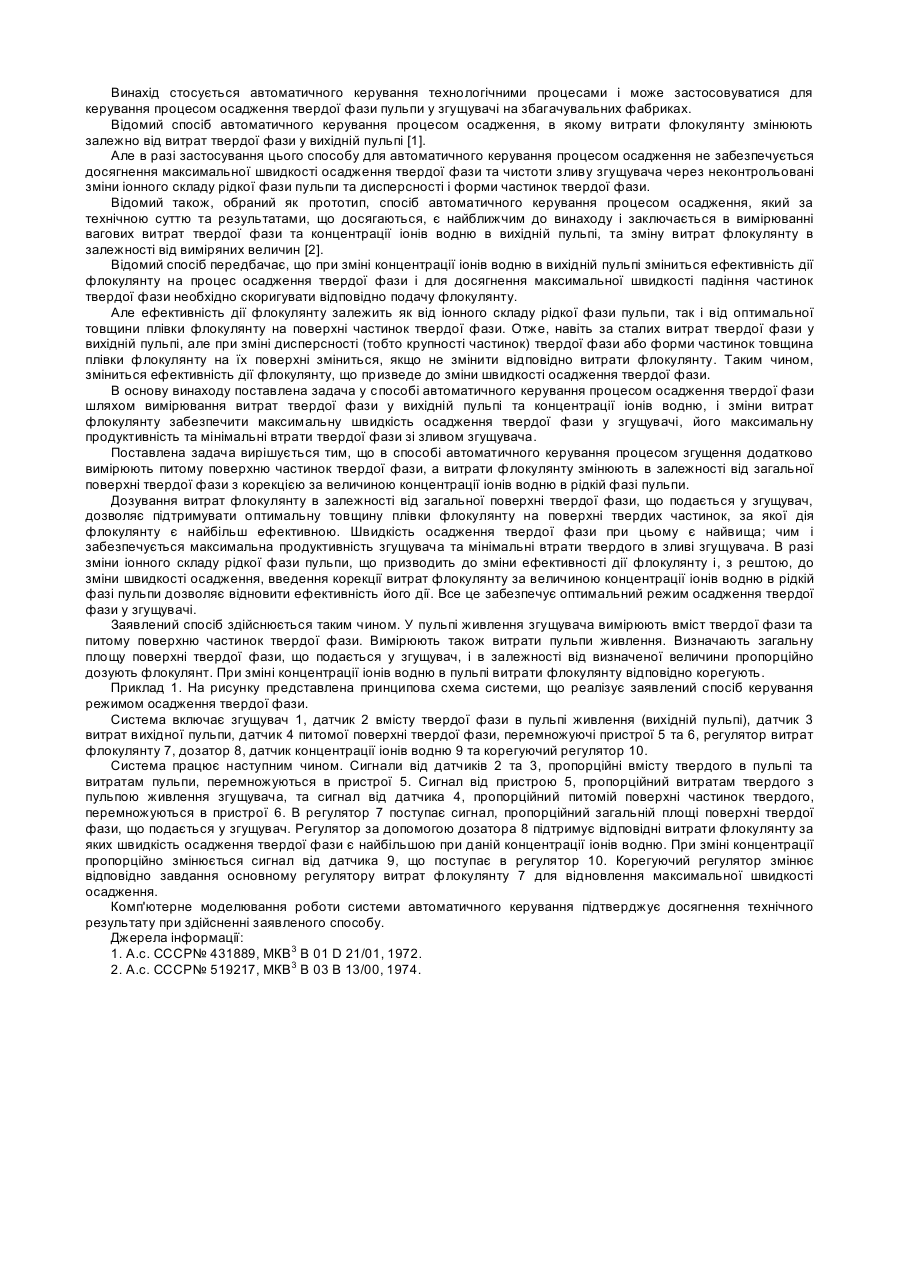
Спосіб автоматичного керування процесом осадження твердої фази шляхом вимірювання вагової витрати твердої фази у вихідній пульпі та концентрації іонів водню та зміни витрати флокулянта, який відрізняється тим, що додатково вимірюють питому поверхню частинок твердої фази, а витрату флокулянта змінюють в залежності від загальної поверхні твердої фази з корекцією за величиною концентрації іонів водню в рідкій фазі пульпи.
Спосіб автоматичного керування процесом охолодження грильяжної маси
Номер патенту: 37226
Опубліковано: 25.11.2008
Автори: Муратов Віктор Георгійович, Гарковенко Андрій Миколайович
МПК: A23G 3/12
Мітки: спосіб, охолодження, грильяжної, автоматичного, процесом, керування, маси
Формула / Реферат:
Спосіб автоматичного керування, при якому проводять вимірювання і регулювання температури охолодження грильяжної маси зміною витрат охолоджувача крізь поліформуючі вали, вимірювання і регулювання температури цієї маси, зміною швидкості повітря в охолоджувальному тунелі, який відрізняється тим, що додатково вимірюють положення регулюючого органу подачі охолоджувача формуючих валків, різницею тисків цього охолоджувача вказаним регулюючим...
Попередній патент: Зачисна головка
Наступний патент: Спосіб отримання гаплоїдів ріпаку із незапліднених насіннєвих зачатків у культурі in vitro
Випадковий патент: Спосіб діагностики розвитку атеросклерозу