Спосіб планування роботи бортових систем космічних апаратів
Номер патенту: 57496
Опубліковано: 25.02.2011
Автори: Ожінський Віктор Васильович, Загорулько Олександр Миколайович, Парфенюк Василь Григорович, Топольницький Павло Петрович
Формула / Реферат
Спосіб планування роботи бортових систем космічних апаратів (КА), який полягає в тому, що планування роботи бортових систем КА здійснюють планувальником бортового комплексу керування за критерієм максимальної корисності.
Текст
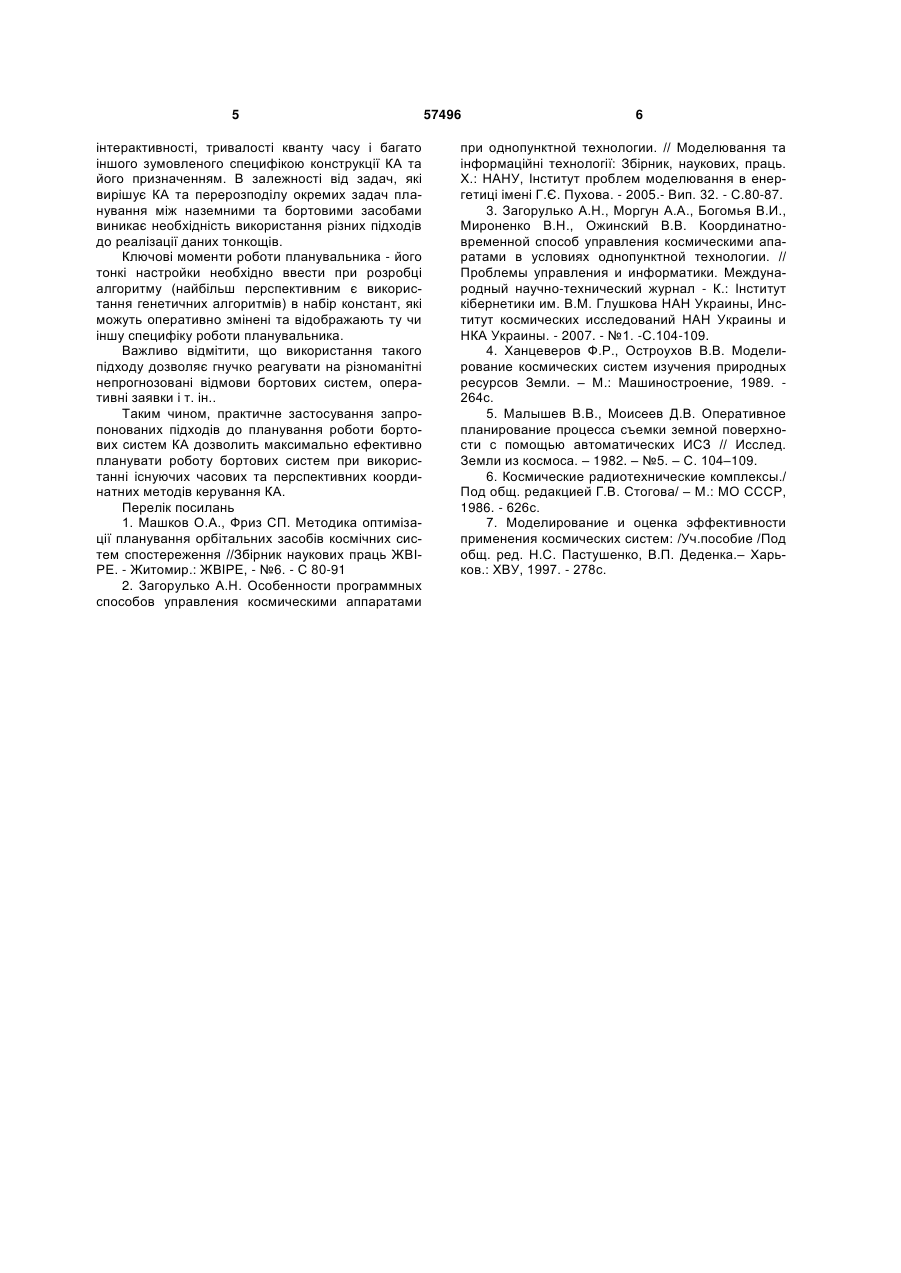
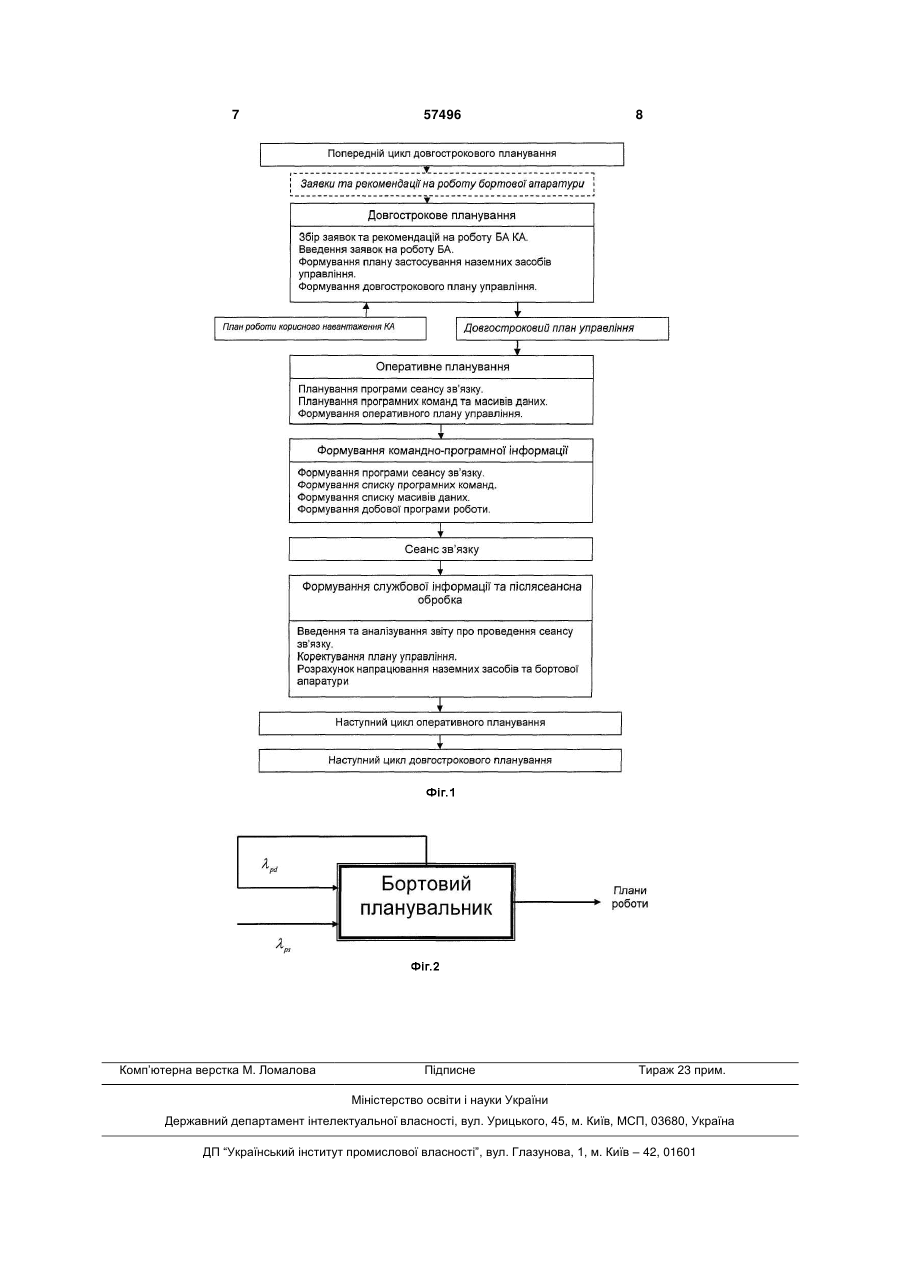
Спосіб планування роботи бортових систем космічних апаратів (КА), який полягає в тому, що планування роботи бортових систем КА здійснюють планувальником бортового комплексу керування за критерієм максимальної корисності. (19) (21) u201012685 (22) 26.10.2010 (24) 25.02.2011 (46) 25.02.2011, Бюл.№ 4, 2011 р. (72) ОЖІНСЬКИЙ ВІКТОР ВАСИЛЬОВИЧ, ПАРФЕНЮК ВАСИЛЬ ГРИГОРОВИЧ, ТОПОЛЬНИЦЬКИЙ ПАВЛО ПЕТРОВИЧ, ЗАГОРУЛЬКО ОЛЕКСАНДР МИКОЛАЙОВИЧ 3 - з'являється можливість більш високої спеціалізації як технічних так і програмних засобів і підвищення за рахунок цього ефективності керування КА. В повній мірі реалізувати дані переваги можливо лише при наявності бортового комплексу керування, який здійснює значну частину обробки інформації: оцінку технічного стану бортових систем, визначення параметрів руху, підтримання високо стабільної сітки частот, шкал часу, вироблення керуючих дій з контролем їх реалізації. В іншому випадку однопунктна технологія має ряд недоліків: - неповна інформованість про космічний стан та результати вирішення поставлених перед КА завданнями; - відсутність можливості маневрування резервами (наприклад при виході зі строю одного з вимірювальних пунктів); - скорочення часу інформаційного обміну з КА та, як наслідок, зменшення об'єму інформації, що передається та приймається з борту КА; - складність балістико-навігаційного забезпечення польоту КА через зменшенню кількості та точності вимірів параметрів руху КА та їх аналізу; - різке скорочення області простору для проведення сеансів зв'язку з КА. Тому пропонується операції з планування роботи бортових систем КА проводити бортовим комплексом керування за допомогою спеціально розробленого алгоритму планування. В цілому планування роботи бортових систем КА з є досить простим функціонально (Фіг.2): На бортовий планувальник поступають два типи заявок: детерміновані заявки з інтенсивністю pd (наприклад заявки щодобового планування) та випадкові заявки з інтенсивністю ps (заявки на оперативне проведення будь-яких робіт, чи заявки викликані відмовами). Заявка проходить фази обслуговування. Завершенням обслуговування є передача планів роботи на елементи системи. Найбільш складним є обробка випадкових заявок, бо вона впливає на характеристики роботи усіх контурів забезпечення польоту КА та технології проведення робіт в цілому. Крім того космічна система має певне значення надійності, але може відмовляти, як у черговому стані так і при виконанні робіт. Інтенсивність ps визначається інтенсивністю відмови бортових та наземних засобів, а також інтенсивністю отримання оперативних заявок на роботу корисного навантаження КА. Тому робота наземних засобів зводиться до визначення переліку можливих реалізацій заявок на проведення зйомок, вмикання/вимикання комплексів наукової апаратури та бортового забезпечувального комплексу, розрахунку значень функції корисності Yi для кожного пакету інформації щодо операції, яку можливо виконати (час чи координати вмикання/вимикання, перелік команд керування та масивів інформації відповідно до циклограм функціонування, та прогнозовані необхідні бортові ресурси), та закладення всіх можливих реалізацій на борт КА. Тобто фактично на наземних засобах 57496 4 не приймається рішення на планування, а в автоматичному (автоматизованому) режимі здійснюються складні організаційно операції обробки заявок на роботу бортових систем КА та розрахунок їх можливих реалізацій, виконуючи потужні за обчислювальною складністю балістичні розрахунки. Задачею бортового планувальника стає раціональний розподіл ресурсів космічного апарату максимізація сумарної функції корисності: YK n c(x) Yi , y(x), i 1 де c(x) ,1 , 0 у(х) - часткові функції корисності, які характеризують кожну можливу реалізацію та розробляються при проектуванні КА. k - коефіцієнт, який має зміст часткової похідної критеріальної функції за k - тим критерієм, обчисленої в базовій точці. При обмеженнях витрат ресурсів КА: - електроенергетичних n c(x) NBi (x) NKH; i 1 - інформаційних - технічних n c(x)IBi(x) IЗП; i 1 n c(x) ТBi (x) ТЗП; i 1 NB - витрати енергоресурсу, пов'язанні з роботою апаратури корисного навантаження на інтервалі планування; NKH - енергоресурс, виділений для використанням апаратури корисного навантаження; ІВ - використаний об'єм записаної інформації, ІЗП - загальний об'єм бортового запам'ятовуючого пристрою апаратури корисного навантаження. Під електроенергетичним ресурсом розуміють частину ефективної потужності, яка генерується системою енергозабезпечення (СЕЗ) КА, яка виділяється для споживання апаратурою корисного навантаження: n NKН NЗ NСЗі , i 1 де NKH - енергоресурс, виділений для використанням апаратури корисного навантаження; NЗ - загальна потужність, генерована СЕЗ; n NСЗі i 1 - сумарна потужність енергоспожи вання систем забезпечення КА; По своїй суті алгоритм бортового планувальника статичний, тобто логіка його роботи не міняється з плином часу та зводиться до того, що на виконання вибирається перелік задач з максимізацією загальної користі. Але в роботі планувальника існує ряд тонкощів, таких, як розрахунок динамічного пріоритету задачі, критерії оцінки її 5 інтерактивності, тривалості кванту часу і багато іншого зумовленого специфікою конструкції КА та його призначенням. В залежності від задач, які вирішує КА та перерозподілу окремих задач планування між наземними та бортовими засобами виникає необхідність використання різних підходів до реалізації даних тонкощів. Ключові моменти роботи планувальника - його тонкі настройки необхідно ввести при розробці алгоритму (найбільш перспективним є використання генетичних алгоритмів) в набір констант, які можуть оперативно змінені та відображають ту чи іншу специфіку роботи планувальника. Важливо відмітити, що використання такого підходу дозволяє гнучко реагувати на різноманітні непрогнозовані відмови бортових систем, оперативні заявки і т. ін.. Таким чином, практичне застосування запропонованих підходів до планування роботи бортових систем КА дозволить максимально ефективно планувати роботу бортових систем при використанні існуючих часових та перспективних координатних методів керування КА. Перелік посилань 1. Машков О.А., Фриз СП. Методика оптимізації планування орбітальних засобів космічних систем спостереження //Збірник наукових праць ЖВІРЕ. - Житомир.: ЖВІРЕ, - №6. - С 80-91 2. Загорулько А.Н. Особенности программных способов управления космическими аппаратами 57496 6 при однопунктной технологии. // Моделювання та інформаційні технології: Збірник, наукових, праць. X.: НАНУ, Інститут проблем моделювання в енергетиці імені Г.Є. Пухова. - 2005.- Вип. 32. - С.80-87. 3. Загорулько А.Н., Моргун А.А., Богомья В.И., Мироненко В.Н., Ожинский В.В. Координатновременной способ управления космическими апаратами в условиях однопунктной технологии. // Проблемы управления и информатики. Международный научно-технический журнал - К.: Інститут кібернетики им. В.М. Глушкова НАН Украины, Институт космических исследований HAH Украины и НКА Украины. - 2007. - №1. -С.104-109. 4. Ханцеверов Ф.Р., Остроухов В.В. Моделирование космических систем изучения природных ресурсов Земли. – М.: Машиностроение, 1989. 264с. 5. Малышев В.В., Моисеев Д.В. Оперативное планирование процесса съемки земной поверхности с помощью автоматических ИСЗ // Исслед. Земли из космоса. – 1982. – №5. – С. 104–109. 6. Космические радиотехнические комплексы./ Под общ. редакцией Г.В. Стогова/ – М.: МО СССР, 1986. - 626с. 7. Моделирование и оценка эффективности применения космических систем: /Уч.пособие /Под общ. ред. Н.С. Пастушенко, В.П. Деденка.– Харьков.: ХВУ, 1997. - 278с. 7 Комп’ютерна верстка М. Ломалова 57496 8 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюOperation planning method for spaceborne systems
Автори англійськоюOzhinskyi Viktor Vasyliovych, Parfeniuk Vasyl Hryhorovych, Topolnytskyi Pavlo Petrovych, Zahorulko Oleksandr Mykolaiovych
Назва патенту російськоюСпособ планирования работы бортовых систем космических аппаратов
Автори російськоюОжинский Виктор Васильевич, Парфенюк Василий Григорьевич, Топольницкий Павел Петрович, Загорулько Александр Николаевич
МПК / Мітки
МПК: G05B 19/04
Мітки: бортових, космічних, планування, систем, спосіб, апаратів, роботи
Код посилання
<a href="https://ua.patents.su/4-57496-sposib-planuvannya-roboti-bortovikh-sistem-kosmichnikh-aparativ.html" target="_blank" rel="follow" title="База патентів України">Спосіб планування роботи бортових систем космічних апаратів</a>
Спосіб автоматизованої оцінки телеметричної інформації про стан бортових систем космічних апаратів
Номер патенту: 33404
Опубліковано: 25.06.2008
Автори: Писанко Анатолій Григорович, Загорулько Олександр Миколайович
МПК: B64G 1/24
Мітки: систем, бортових, автоматизованої, спосіб, оцінки, космічних, інформації, телеметричної, апаратів, стан
Формула / Реферат:
Спосіб автоматизованої оцінки телеметричної інформації про стан бортових систем космічних апаратів (КА), який полягає в тому, що отримують телеметричну інформацію, проводять попередню обробку телеметричної інформації, розраховують та формують статистичну модель стану космічного апарата, проводять аналіз статистичного стану, проводять сеанси керування з КА та здійснюють видачу керуючих впливів, який відрізняється тим, що після операції...
Спосіб підвищення точності планування роботи бортового спеціального комплексу штучного супутника землі
Номер патенту: 56084
Опубліковано: 15.04.2003
Автор: Богом'я Володимир Іванович
МПК: B64G 3/00
Мітки: комплексу, планування, бортового, роботи, спеціального, землі, штучного, спосіб, підвищення, точності, супутника
Формула / Реферат:
Спосіб підвищення точності планування роботи бортового спеціального комплексу штучного супутника Землі, який полягає в тому, що через технічні засоби прийому до формувача наукової заявки надходять метеодані, які перетворюють з аналогової в цифрову форму з наступним записом на магнітні носії ПЕОМ, отримані значення полів баричної інформації накладають на географічні координати заданих районів зйомки і розраховують можливість зйомки бортовим...
Спосіб планування спостереження космічних об`єктів оптико-електронними засобами контролю космічного простору
Номер патенту: 38358
Опубліковано: 12.01.2009
Автори: Рачинський Олександр Петрович, Пашков Дмитро Павлович, Богдановський Олексій Миколайович, Ломоносов Сергій Євгенійович
МПК: B64G 3/00
Мітки: спосіб, спостереження, контролю, космічного, космічних, засобами, оптико-електронними, простору, об'єктів, планування
Формула / Реферат:
Спосіб планування спостереження космічних об'єктів (КО) оптико-електронними засобами (ОЕЗ) контролю космічного простору (ККП), який полягає в визначенні черговості спостережень для КО, що одночасно перебувають в зоні дії засобу ККП в відповідності з розрахованими співвідношеннями помилок та часу визначення початкових умов шляхом прогнозування значень останніх на момент входу в зону дії ОЕЗ та технічних параметрів телескопа, який відрізняється...
Носій магнітного запису для авіаційних бортових систем
Номер патенту: 7011
Опубліковано: 15.06.2005
Автори: Трачевський Вячеслав Васильович, Іванов Сергій Віталійович, Столярова Наталія Вікторовна, Тітова Ольга Самійлівна
Мітки: магнітного, авіаційних, носій, систем, запису, бортових
Формула / Реферат:
Носій магнітного запису для авіаційних бортових систем, що має робочий прошарок із нанесеним на нього захисним прошарком, який відрізняється тим, що захисний прошарок виконаний із фтороорганічної сполуки, наприклад тетрафторетилену, нанесеного плазмохімічним методом.
Спосіб переорієнтації космічних апаратів
Номер патенту: 29637
Опубліковано: 25.01.2008
Автори: Жила Олексій Володимирович, Загорулько Олександр Миколайович, Ожінський Віктор Васильович, Кошовий Олег Віталійович
МПК: G05B 17/00
Мітки: спосіб, переорієнтації, космічних, апаратів
Формула / Реферат:
Спосіб переорієнтації космічних апаратів, який полягає в тому, що в сеансі зв’язку процесор приймає щосекундно дані про параметри руху космічних апаратів (X, Y, Z, Vx, Vy, Vz, T) у Гринвіцькій системі координат з навігаційного приймача (GPS, "Глобалстар"), обробляє їх, обраховує кути між надиром та напрямком на ППІ та видає їх значення до підсистеми орієнтації та стабілізації для виконання відворотів, який відрізняється тим, що...
Попередній патент: Спосіб лазерного контролю якості кристалічних матеріалів, прозорих в оптичному діапазоні випромінювання
Наступний патент: Пристрій для моделювання процесів вимірювання фотоелектричним датчиком кутового відхилення рульової поверхні літака
Випадковий патент: Автоматична інерційно-фрикційна муфта зчеплення