Пристрій для моделювання процесів вимірювання фотоелектричним датчиком кутового відхилення рульової поверхні літака
Номер патенту: 57497
Опубліковано: 25.02.2011
Формула / Реферат
1. Пристрій для моделювання процесів вимірювання фотоелектричним датчиком кутового відхилення рульової поверхні літака, що містить оптично зв'язані випромінювач, світловоди та фотоприймальний блок, затискач для закріплення випромінювача на краю рульової поверхні, а торці світловодів укладені по дузі кола, яке окреслюється рульовою поверхнею, з радіусом, що дорівнює довжині рульової поверхні, при цьому дуга кола розташована в площині, перпендикулярній до рульової поверхні літака, який відрізняється тим, що введені електроприводи горизонтального і вертикального переміщення, передавальний механізм горизонтального переміщення, механізм поступального та обертального руху рульової поверхні літака, які змонтовані на горизонтальних і вертикальних стійках, закріплених на станині, причому електроприводи горизонтального і вертикального переміщення підключені до блока керування.
2. Пристрій за п. 1, який відрізняється тим, що як випромінювач використано ІЧ-діод, а на тримачі, який являє собою дугу кола, що окреслюється рульовою поверхнею, з радіусом, який дорівнює довжині рульової поверхні, при цьому дуга кола розташована в площині, перпендикулярній до рульової поверхні літака, розміщені фотодіоди, які реагують на інфрачервоне проміння і з'єднані із входами електронної схеми обробки сигналів.
Текст
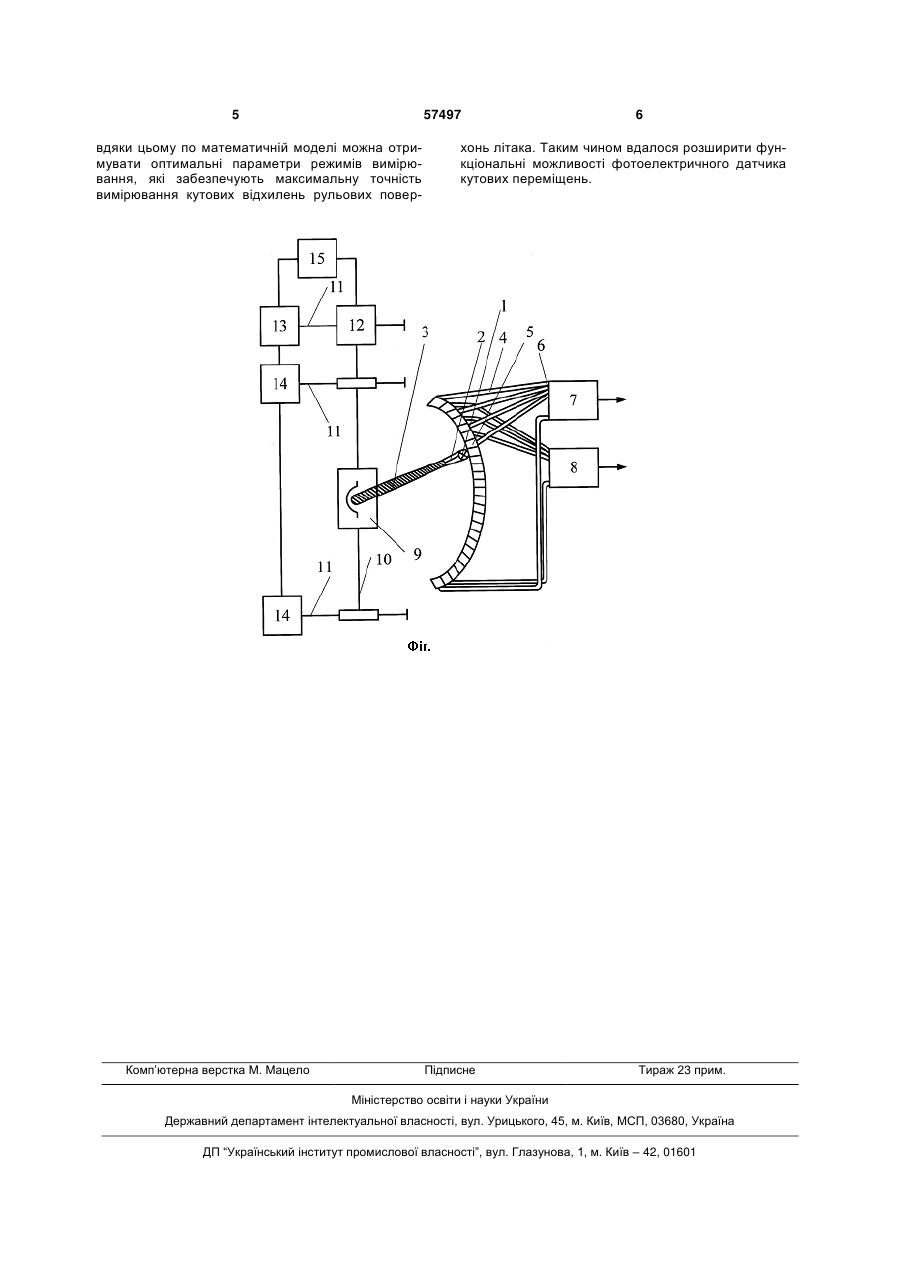
1. Пристрій для моделювання процесів вимірювання фотоелектричним датчиком кутового відхилення рульової поверхні літака, що містить оптично зв'язані випромінювач, світловоди та фотоприймальний блок, затискач для закріплення випромінювача на краю рульової поверхні, а торці світловодів укладені по дузі кола, яке окреслюється рульовою поверхнею, з радіусом, що дорівнює довжині рульової поверхні, при цьому дуга кола розташована в площині, перпендикулярній до ру U 1 3 Для досягнення визначеної мети пропонується пристрій для моделювання процесів вимірювання фотоелектричним датчиком кутового відхилення рульової поверхні літака, що містить оптично зв'язані випромінювач, світловоди та фотоприймальний блок, затискач для закріплення випромінювача на краю рульової поверхні, а торці світловодів укладені по дузі кола, яке окреслюється рульовою поверхнею, з радіусом, що дорівнює довжині рульової поверхні, при цьому дуга кола розташована в площині, перпендикулярній до рульової поверхні літака, в якому згідно з корисною моделлю введені електроприводи горизонтального і вертикального переміщення, передавальний механізм горизонтального переміщення, механізм поступального та обертального руху рульової поверхні літака, які змонтовані на горизонтальних і вертикальних стійках, закріплених на станині, причому електроприводи горизонтального і вертикального переміщення підключені до блока керування. Введення таких додаткових елементів як електроприводи горизонтального і вертикального переміщення, передавальний механізм горизонтального переміщення, механізм поступального та обертального руху рульової поверхні літака, горизонтальні і вертикальні стійки, станина, блок керування і їх підключення згідно з корисною моделлю дає можливість моделювати процеси вимірювання кутових відхилень рульових поверхонь літака. На Фіг. зображена функціональна схема пристрою для моделювання процесів вимірювання фотоелектричним датчиком кутових вимірювань рульової поверхні літака. Пристрій містить випромірювач 1 (можливе застосування лазерного випромінювача або ІЧ - діода), який закріплено за допомогою затискача 2 на рульовій поверхні 3 літака, світловоди 4, вхідні торці 5 котрих укладені по дузі кола, що окреслюється рульовою поверхнею, яка виконує кутовий рух, а вихідні торці 6 об'єднані в парні та непарні, два фотоприймача 7 і 8 фотоприймального блока. Виходи парних світловодів оптично зв'язані з фотоприймачем 8, а виходи непарних - з фотоприймачем 7. Рульова поверхня З закріплена на механізмі 9 поступального та обертального руху, який змонтовано на стійках вертикального 10 і горизонтального 11 переміщення, що закріплені на станині. На цих стійках змонтовані також електроприводи вертикального 12 і горизонтального 13 переміщення та передавальний механізм 14 горизонтального переміщення. Електроприводи горизонтального 13 і вертикального 12 переміщення підключені до блока 15 керування. Задача також вирішується, якщо замість світловодів 4 використовуються фотоприймачі, які закріплені на металевої дузі, з радіусом, що дорівнює довжині рульової поверхні літака. Фотоприймачі з'єднані із входами електронної схеми обробки сигналів, яка застосовується замість фотоприймального блока (фотоприймачі 7 і 8). Пристрій працює таким чином. Світловий потік від випромінювача 1, що закріплений за допомогою затискача 2 на рульової поверхні 3, спрямовується на вхідні торці 5 світловодів 4 (або на фотоприймачі, що реагують на інфракрасне 57497 4 випромінювання у випадку використання ІЧ - діода в якості випромінювача), які розміщені по дузі кола, що окреслюється кутовим рухом рульової поверхні. В результаті цього на вхідних торцях 5 світловодів 4 формується світловий потік, який подається на вихідні торці 6 світловодів 4, тобто на входи фотоприймачів 7 і 8, які забезпечують перетворення сигналу в електричний та формування з нього коротких імпульсних сигналів для подальшої обробки в цифрових пристроях. Вихідні торці 6 світловодів 4 розділені на парні та непарні, об'єднані й оптично зв'язані с фотоприймачами 8 і 7. Внаслідок цього при кутовому русі рульової поверхні сигнал послідовно з'являється то в одному, то в іншому фотоприймачі. У випадку застосування замість світловодів фотоприймачів, вони при проходженні крізь них інфрачервоного світла видають електричні сигналі, що поступають на електронну схему обробки сигналів. Для отримання математичної моделі, яка характеризує залежність абсолютних похибок ∆U відгуку приймальних елементів від таких факторів, як кут нахилу β осі приймача відносно осі випромінювача (Х1), інтервал ∆у між осями приймача та випромінювача (Х2), дистанція ∆Х між приймачем та випромінювачем (Х3), необхідно згідно з планом експерименту провести дослідження. За допомогою механізму 9 поступального та обертального руху встановлюється необхідне значення кута β (Х1), що задається першим рядком матриці планування експерименту. За сигналами з блока керування 15 електропривід 12 вертикального переміщення і механізму поступального та обертального руху 9 установлює необхідне значення ∆у(Х2), що задається першим рядком матриці планування, а електропривід 13 і передавальний механізм 14 горизонтального переміщення - необхідне значення ∆Х(Х3). Після цього вимірюється значення вихідного сигналу на виходах фотоприймача 7 (8) або на виході електронної схеми обробки сигналів і визначається абсолютна похибка ∆Ui = | Ui - Ue |, де Uі - значення напруги для і-го досліду плану експерименту, Ue - значення напруги у точці екстремуму. Потім реалізуються досліди, що задаються поточними рядками матриці планування експерименту. При цьому пристрій працює аналогічно. Після реалізації всіх дослідів, що задаються матрицею планування, за результатами експериментів визначаються коефіцієнти поліноміальної математичної моделі ∆U = f(Х1,Х2,Х3). Позитивний ефект від застосування розробленого пристрою полягає в тому, що за допомогою введення електроприводів горизонтального і вертикального переміщення, передавального механізму горизонтального переміщення, механізму поступального та обертального руху рульової поверхні літака, які змонтовані на горизонтальних і вертикальних стійках, закріплених на станині, причому електроприводи горизонтального і вертикального переміщення підключені до блока керування, вдається моделювати процеси вимірювання кутового відхилення рульової поверхні літака. За 5 57497 вдяки цьому по математичній моделі можна отримувати оптимальні параметри режимів вимірювання, які забезпечують максимальну точність вимірювання кутових відхилень рульових повер Комп’ютерна верстка М. Мацело 6 хонь літака. Таким чином вдалося розширити функціональні можливості фотоелектричного датчика кутових переміщень. Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for modeling processes of measurement with photoelectric indicator of angle of deflection of rudder surface of aircraft
Автори англійськоюKoshovyi Mykola Dmytrovych, Kostenko Olena Mykhailivna
Назва патенту російськоюУстройство для моделирования процессов измерения фотоэлектрическим датчиком углового отклонения рулевой поверхности самолета
Автори російськоюКошевой Николай Дмитриевич, Костенко Елена Михайловна
МПК / Мітки
МПК: G01B 11/00, B64C 29/00
Мітки: відхілення, моделювання, вимірювання, пристрій, датчиком, процесів, літака, фотоелектричним, кутового, рульової, поверхні
Код посилання
<a href="https://ua.patents.su/3-57497-pristrijj-dlya-modelyuvannya-procesiv-vimiryuvannya-fotoelektrichnim-datchikom-kutovogo-vidkhilennya-rulovo-poverkhni-litaka.html" target="_blank" rel="follow" title="База патентів України">Пристрій для моделювання процесів вимірювання фотоелектричним датчиком кутового відхилення рульової поверхні літака</a>
Пристрій для вимірювання кутового відхилення рульової поверхні літака
Номер патенту: 46220
Опубліковано: 10.12.2009
Автори: Цеховський Максим Володимирович, Кошовий Микола Дмитрович, Оганесян Артем Семенович
МПК: G01B 11/26
Мітки: рульової, кутового, пристрій, поверхні, відхілення, вимірювання, літака
Формула / Реферат:
Пристрій для вимірювання кутового відхилення рульової поверхні літака, що містить ІЧ-діод як випромінювач, затискач для його закріплення, фотоприймачі, що реагують на інфрачервоне проміння, які закріплені на тримачі, що являє собою дугу кола, яка окреслюється рульовою поверхнею, з радіусом, що дорівнює довжині рульової поверхні, при цьому дуга кола розташована в площині, перпендикулярній до рульової поверхні літака, фотодіоди з'єднані зі...
Фотоелектричний датчик кутового переміщення рульової поверхні літака
Номер патенту: 27040
Опубліковано: 10.10.2007
Автори: Кошовий Микола Дмитрович, Оганесян Артем Семенович
МПК: G01B 11/26
Мітки: поверхні, рульової, датчик, кутового, фотоелектричний, переміщення, літака
Формула / Реферат:
Фотоелектричний датчик кутового переміщення рульової поверхні літака, що містить оптично зв'язані випромінювач, світловоди та фотоприймальний блок, який відрізняється тим, що додатково містить затискач для закріплення випромінювача на краю рульової поверхні, а торці світловодів укладені по дузі кола, яке окреслюється рульовою поверхнею, з радіусом, що дорівнює довжині рульової поверхні, при цьому дуга кола розташована в площині,...
Пристрій для вимірювання кутового відхилення рульової поверхні літака
Номер патенту: 52416
Опубліковано: 25.08.2010
Автори: Іваненко Анжела Василівна, Оганесян Артем Семенович, Субота Анатолій Максимович
МПК: G01B 11/26
Мітки: поверхні, рульової, відхілення, кутового, літака, пристрій, вимірювання
Формула / Реферат:
Пристрій для вимірювання кутового відхилення рульової поверхні літака, що містить пластину, що являє собою дугу кола, що окреслюється рульовою поверхнею з радіусом, що дорівнює довжині поверхні, при цьому дуга розташована в площині, перпендикулярній до рульової поверхні літака, та з'єднана пластиною затискача з рульовою поверхнею, який відрізняється тим, що верхня пластина виконана з лівої та правої частини, знизу паралельно якій розташована...
Оптронний датчик кутового переміщення рульової поверхні літака

Номер патенту: 33535
Опубліковано: 25.06.2008
Автори: Кошовий Микола Дмитрович, Оганесян Артем Семенович, Цеховський Максим Володимирович
МПК: G01B 11/26
Мітки: кутового, літака, датчик, переміщення, поверхні, оптронний, рульової
Формула / Реферат:
Оптронний датчик кутового переміщення рульової поверхні літака, що містить випромінювач, затискач для його закріплення та тримач, що являє собою дугу кола, яка окреслюється рульовою поверхнею, з радіусом, що дорівнює довжині рульової поверхні, при цьому дуга кола розташована в площині, перпендикулярній до рульової поверхні літака, який відрізняється тим, що як випромінювач використано ІЧ-діод, а на тримачі закріплено фотодіоди, що реагують на...
Цифровий датчик кутового переміщення рульової поверхні літака

Номер патенту: 36496
Опубліковано: 27.10.2008
Автори: Цеховський Максим Володимирович, Кошовий Микола Дмитрович, Оганесян Артем Семенович
МПК: G01B 11/26
Мітки: кутового, поверхні, переміщення, літака, рульової, датчик, цифровий
Формула / Реферат:
Цифровий датчик кутового переміщення рульової поверхні літака, що містить ІЧ-діод як випромінювач, затискач для його закріплення, фотодіоди, що реагують на інфрачервоне проміння, які закріплені на тримачі, що являє собою дугу кола, яка окреслюється рульовою поверхнею, з радіусом, що дорівнює довжині рульової поверхні, при цьому дуга кола розташована в площині, перпендикулярній до рульової поверхні літака, фотодіоди з'єднані зі входами...
Попередній патент: Спосіб планування роботи бортових систем космічних апаратів
Наступний патент: Торпеда для вибухової обробки пласта
Випадковий патент: Асинхронний електродвигун