Пристрій програмного керування і контролю ходу шахтних підйомних машин
Номер патенту: 5758
Опубліковано: 29.12.1994
Автори: Матвієнко Микола Павлович, Марищенко Олександр Іванович
Формула / Реферат
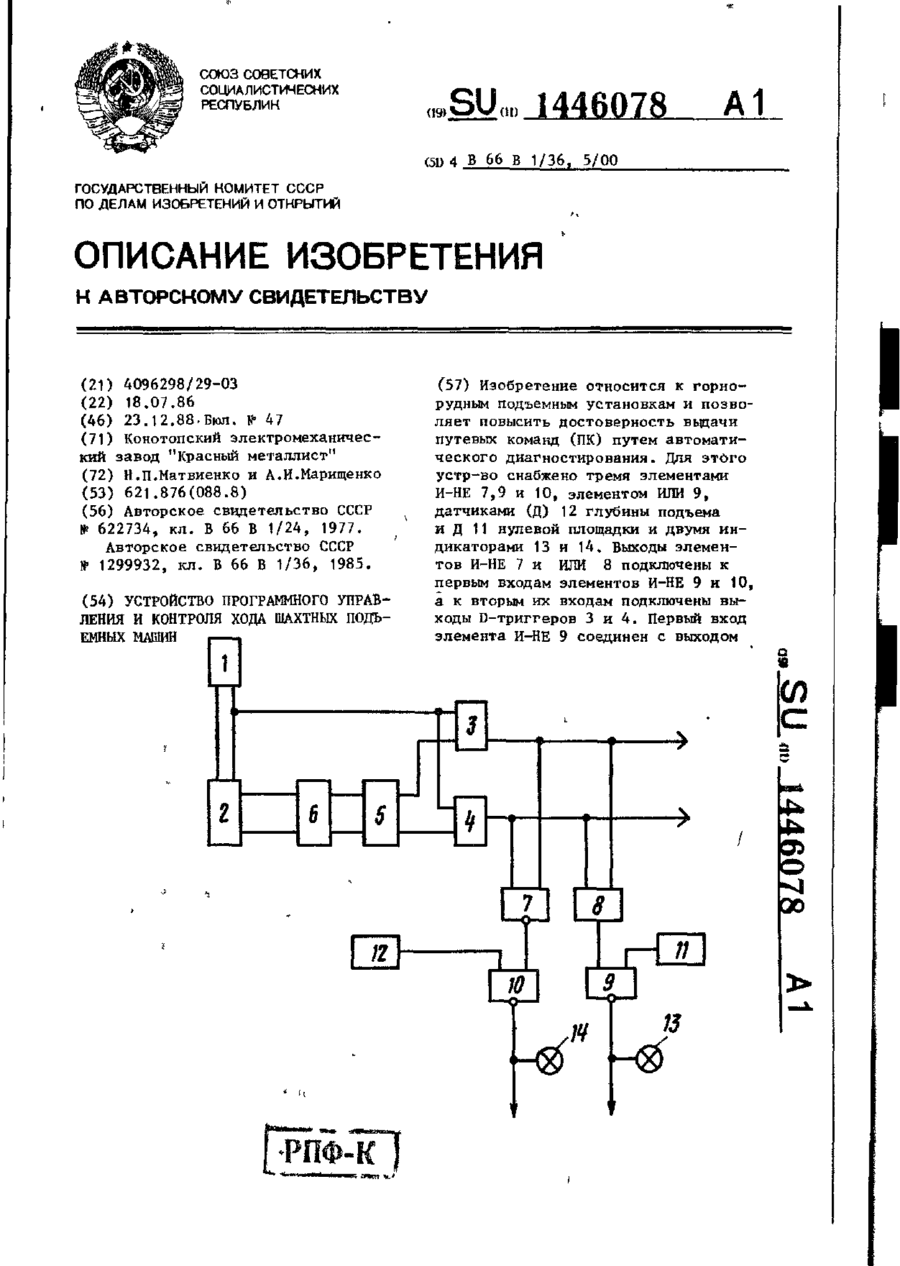
Устройство программного управлений и контроля хода шахтных подъемных машин, содержащее датчик путевых импульсов, первый выход которого соединен со счетным, а второй выход - с управляющим входом реверсивного счетчика и информационными входами первого и второго D-триггеров, синхронизирующие входы которых через дешифратор и постоянный запоминающий узел подключены к выходам реверсивного счетчика, при этом выходы первого и второго D-триггеров включены в цепь электропривода подъемной машины, отличающееся тем, что, с целью повышения достоверности выдачи путевых команд путем автоматического диагностирования, оно снабжено тремя элементами И-НЕ, элементом ИЛИ, датчиком глубины подъема, датчиком нулевой площадки и двумя индикаторами, причем выходы первого и второго D-триггеров подключены к первым и вторым входам второго элемента И-НЕ и элемента ИЛИ, выход датчика нулевой площадки подключен к первому входу первого элемента И-НЕ, второй вход которого подключен к выходу элемента
ИЛИ, а выход первого элемента И-НЕ подключен к первому ивдикатору, датчик глубины подъема подключен к первому входу третьего элемента И-НЕ, второй вход которого подключен к выходу второго элемента И-НЕ, при этом выход второго элемента И-НЕ подключен к второму индикатору.
Текст
Изобретение относится к горнорудным подъемным установкам и позволяет повысить достоверность выдачи путевых команд (ПК) путем автоматического диагностирования. Для этого устр-во снабжено тремя элементами И-НЕ 7,9 и 10, элементом ИЛИ 9, датчиками (Д) 12 глубины подъема и Д 11 нулевой площадки и двумя индикаторами 13 и 14. Выходы элементов И-НЕ 7 и ИЛИ 8 подключены к первым входам элементов И-НЕ 9 и 10, а к вторым их входам подключены выходы D-триггеров З и 4. Первый вход элемента И-НЕ 9 соединен с выходом а » О 00 1446078 Д 11, первый вход элемента И-НЕ 10 с выходом Д 12. Выходы элементов И-НЕ 9 и 10 подключены к индикаторам 13 и 14 соответственно. К информационным входам D-триггеров З и 4 подключен один выход Д 1 путевых Импульсов, и оба его выхода соединены соответственно со счетным и управляющим входами реверсивного счетчика 2. Выходы счетчика 2 подключены к входам постоянного запоминающего узла 6, выходы которого соединены с входами дешифратора 5. При движении сосуда подъемной машины вниз или вверх при выдаче всех запрограммированных ПК на выходах соответственно элементов И-НЕ 7 или ИЛИ 8 будет присутствовать сигнал ноль. При наличии хотя бы одной не снятой ТІК на выходе элемента И-НЕ 7 или ИЛИ 8 соответственно появится сигнал,который приведет к срабатыванию элемента И-НЕ 9 или 10, а следовательно, к загоранию индикатора 14 или 13. Это свидетельствует о неисправности в устр-ве. 1 ил. 1 Изобретение относится к горнорудным подъемным установкам и может быть использовано для управления и контроля хода шахтных подъемных машин. Целью изобретения является повышение достоверности выдачи путевых команд путем автоматического диагностирования. ^ 4Q На чертеже изображена функциональная схема устройства. Устройство состоит из датчика 1 путевых импульсов, один выход которого соединен со счетным, а второй - J5 с управляющим входом реверсивного счетчика 2 и информационными входами первого 3 и второго 4 D-триггеров. Синхронизщ>ующие входы D-триггеров 3 и 4 подключены к ылходам дешифрато-20 ра 5, входы которого соединены с выходами постоянного запоминающего узла 6 (ПЗУ). Входы ПЗУ 6 подключены к выходам реверсивного счетчика 2, а выходы D-триггеров З и 4 соединены с вхо-25 дами второго элемента И-НЕ 7 и э л е мента И И 8. Л Выходы элементов И-НЕ 7 и И И 8 Л подключены к вторым входам первого 9 и третьего W элементов И-НЕ соответ-^о ственно. Первый вход элемента И-НЕ 9 соединен с выходом датчика 11 нулевой площадки, а первый вход третьего элемента И-НЕ W - с выходом датчика 12 глубины подъема. Выходы элементов первого 9 и третьего 10 элемен- 35 тов И-НЕ подключены к первому 13 и второму f4 индикатору соответственно. Датчик 1 путевых импульсов предназначен как для определения направления движения сосуда шахтной подъемной машины, так и для выдачи дискретных сигналов, пропорциональных пройденному машиной пути, например, с дискретностью 0,01 м. При движении сосуда вниз от нулевой плошадки на втором выходе датчика 1 путевых импульсов присутствует сигнал "1", а при движении вверх - сигнал " 0 " . ПЗУ 6 предназначено для программирования путевых команд по всей высоте подъема. На его выходах появляются двоичные запрограммированные сигналы,например,в двоичном нормальном коде,которые поступают на входы дешифратора 5.Двоичные запрограммированные сигналы на выходах ПЗУ 6 соответствуют заданной путевой команде на данной высоте подъема. ПЗУ 6 представляет собой полупроводниковый перепрограммируемый постоянный запоминающий узел выполненный, например, на микросхемах К573РФ5, К573РФ6 и д р . При малом количестве путевых команд сигналы с выходов ПЗУ 6 на входы D-триггеров З и 4 могут поступать непосредственно. При этом программирование путевых команд в ПЗУ 6 осуществляется в позиционном коде, Датчик 12 глубины подъема предназначен для выдачи сигнала " 1 " при достижении шахтной подъемной машиной заданной глубины. Б качестве датчика 12 глубины подъема может быть использован датчик нулевой площадки проти 1446078 площадке и с датчика 11 на вход э л е воположного скипа шахтной подъемной мента И-НЕ 9 поступает сигнал " I й . машины. Элемент И-НЕ 9 не сработает и индиУстройство работает следующим обкатор 13 не з а г о р а е т с я . При наличии разом. с „ ь хотя бы одной не снятой путевой к о манды на выходе элемента ИЛИ 8 появляПри движении сосуда шахтной подъемется сигнал, который приводит к сраной машины от нулевой площадки вниз батыванию элемента И-НЕ 9, а следос первого выхода датчика 1 путевых импульсов на счетный вход реверсивновательно, и к загоранию индикатого счетчика 2 поступают импульсы,про-ю ра 13, что свидетельствует о неисппорциональные пути, пройденному с о равности в устройстве с указасудом. С второго выхода датчика 1 пунием причины - не снятии путетевых импульсов на управляющий вход вой команды. реверсивного счетчика 2 и информационные входы D-триггеров З и 4 посту- 15 Ф о р м у л а и з о б р е т е н и я пает сигнал " Г 1 . Информация о пройденном пути подъемным сосудом постуУстройство программного управлепает с выхода реверсивного счетчика 2 ния и контроля хода шахтных подъемна адресные входы ПЗУ 6. С разрядных 20 ных машин, содержащее датчик путевых выходов ПЗУ 6 информация поступает импульсов, первый выход которого соена входы дешифратора 5, который динен со счетным, а второй выход - с включает D-триггеры З и 4, выдавая управляющим входом реверсивного счетпутевые команды в систему управления чика и информационными входами перэлектроприводом. При выдаче всех з а 25 вого и второго D-триггеров,синхронизипрограммированных путевых команд на рующие входы которых через дешифравыходе второго элемента И-НЕ 7 притор и постоянный запоминающий узел сутствует сигнал " О " , под действием подключены к выходам реверсивного которого третий элемент И-НЕ 10 не счетчика, при этом выходы первого срабатывает, несмотря на т о , что на втором входе его присутствует сигнал 30 и второго D-триггеров включены в цепь электропривода подъемной машины, о т " 1 " от датчика 12 глубины подъема. л и ч а ю щ е е с я тем, ч т о , с цеПри отсутствии хотя бы одной запролью повышения достоверности выдачи граммированной путевой команды на путевых команд путем автоматическовходе элемента И-НЕ 7 на его выходе появляется сигнал " 1 " , который при-,(. го диагностирования, оно снабжено водит к срабатыванию элемента И-НЕ 10, тремя элементами И-НЕ, элементом ИЛИ, а следовательно, и загоранию индидатчиком глубины подъема, датчиком катора 14, что свидетельствует о ненулевой площадки и двумя индикатоисправности в устройстве с указанием рами, причем выходы первого и второне выдачи путевой коман- 40 г о D-триггеров подключены к первым ее причины и вторым входам второго элемента И-НЕ ДЫ. При движении сосуда подъемной и элемента ИЛИ, выход датчика нулемашины вверх на втором выходе датчивой площадки подключен к первому вхока 1 путевых импульсов присутствует ду первого элемента И-НЕ, второй вход сигнал " 0 " , вследствие чего D-триг45 которого подключен к выходу элеменгеры 3 и 4 выключаются под дейстта ИЛИ, а выход первого элемента вием сигналов, поступающих с ПЗУ 6 И-НЕ подключен к первому индикатору, через дешифратор 5, а следовательно, датчик глубины подъема подключен к и снижаются путевые команды. При сня первому входу третьего элемента И-НЕ, тии всех запрограммированных путевых 5 0 второй вход которого подключен к выкоманд на выходе элемента ИЛИ 8 приходу второго элемента И-НЕ, при этом сутствует сигнал " 0 " . Б это время выход третьего элемента И-НЕ подклюподъемный сосуд подойдет к нулевой чен к второму индикатору. ВНИИПИ Заказ 6699/26 Тираж 691 Подписное Произв.-полигр. п р - т и е , г . Ужгород, у л . Проектная, 4
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for programmable management and control of mine winder travel
Автори англійськоюMatvienko Mykola Pavlovych, Maryschenko Oleksandr Ivanovych
Назва патенту російськоюУстройство программного управления и контроля хода шахтных подъемных машин
Автори російськоюМатвиенко Николай Павлович, Марищенко Александр Иванович
МПК / Мітки
Мітки: шахтних, програмного, контролю, підйомних, пристрій, керування, ходу, машин
Код посилання
<a href="https://ua.patents.su/4-5758-pristrijj-programnogo-keruvannya-i-kontrolyu-khodu-shakhtnikh-pidjjomnikh-mashin.html" target="_blank" rel="follow" title="База патентів України">Пристрій програмного керування і контролю ходу шахтних підйомних машин</a>
Пристрій для контролю ресурсу комутаційних апаратів
Номер патенту: 2714
Опубліковано: 26.12.1994
Автори: Головатюк Микола Олександрович, Грабко Володимир Віталійович, Мокін Борис Іванович
МПК: G07C 3/10
Мітки: ресурсу, апаратів, комутаційних, пристрій, контролю
Формула / Реферат:
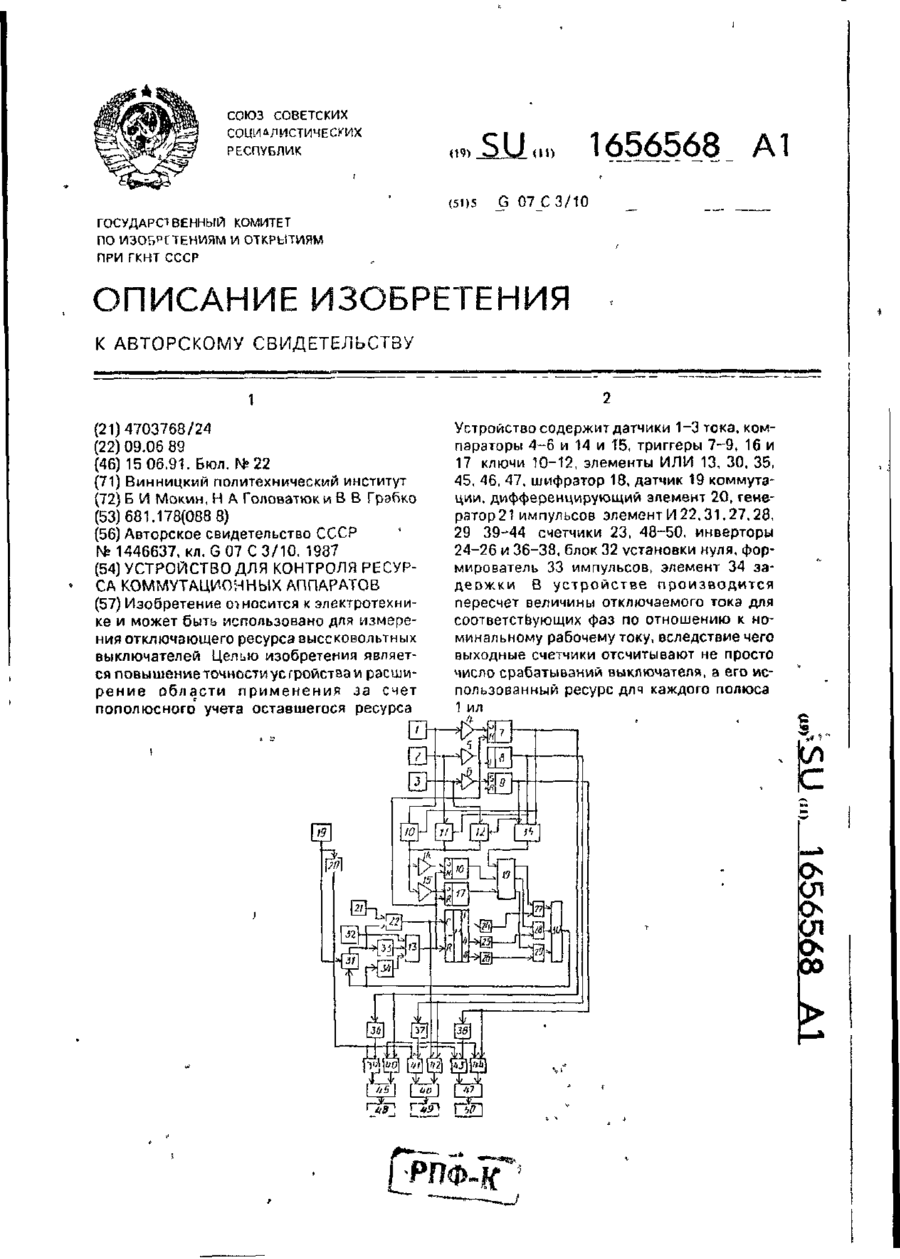
Устройство для контроля ресурса коммутационных аппаратов, содержащее первый датчик тока, выход которого через первый компаратор подключен к 5-входу первого триггера, второй и третий компараторы, выходы которых соединены соответственно с 8-входами второго и третьего триггеров, генератор импульсов, выход которого подключен к первому входу первого элемента И, второй вход которого соединен с выходом второго элемента И, который подключен к...
Пристрій для вимірювання переміщень
Номер патенту: 454
Опубліковано: 30.04.1993
Автори: Вдовиченко Валерій Іванович, Виговський Олександр Володимирович, Токовенко Степан Омелянович, Тализін Григорій Володимирович, Свідлер Ігор Давидович, Оснач Віктор Григорович
МПК: H03M 1/50
Мітки: вимірювання, переміщень, пристрій
Формула / Реферат:
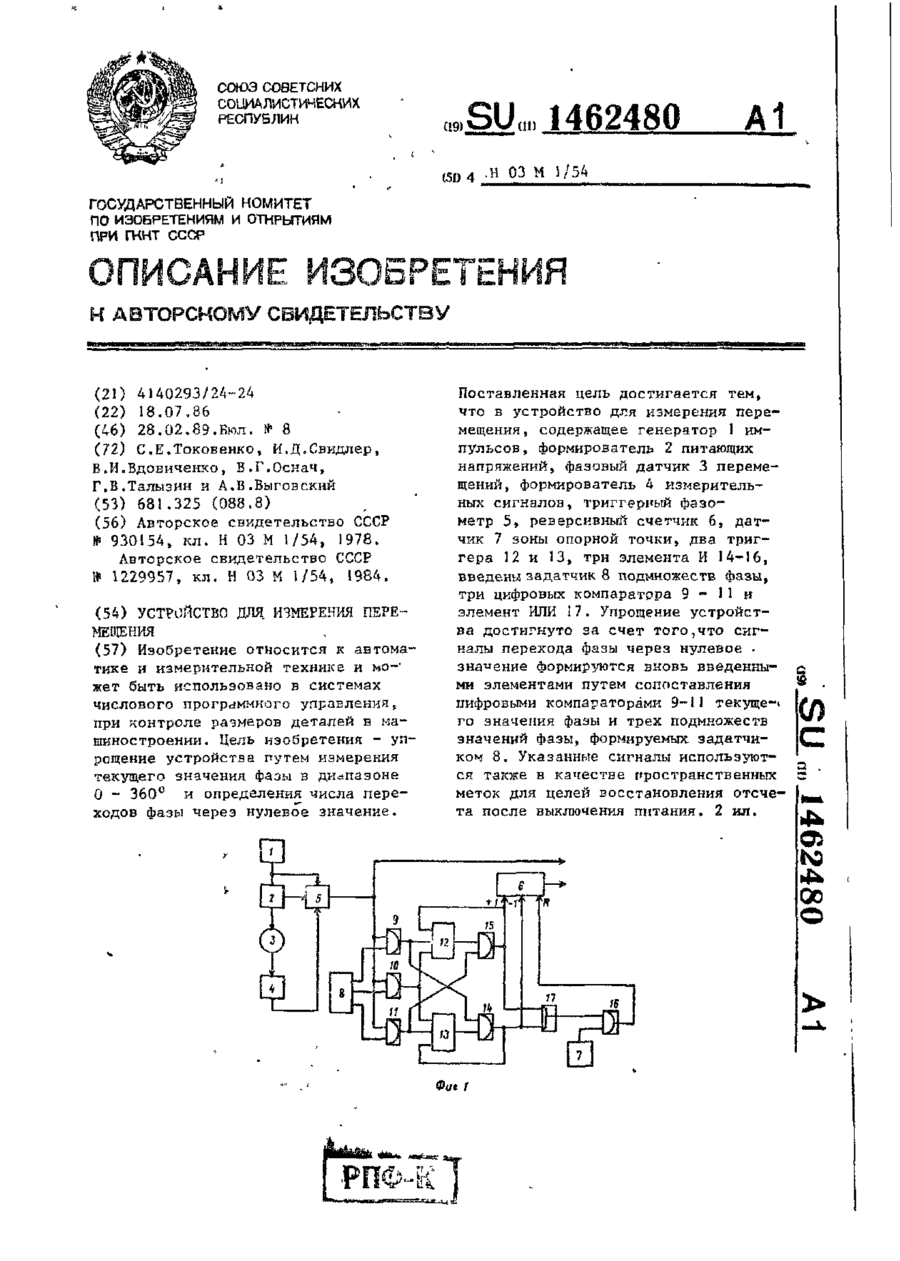
Формула изобретенияУстройство для измерения перемещения, содержащее генератор импульсов, выход которого соединен с входом формирователя питающих напряжений и с первым входом триггерного фазометра, второй вход которого подключен к первому выходу формирователя питающих напряжений, второй выход которого соединен с входом фазового датчика перемещений, выход которого через формирователь измерительных сигналов подключен к третьему входу...
Пристрій для вимірювання фазового зсуву
Номер патенту: 457
Опубліковано: 30.04.1993
Автори: Токовенко Степан Омелянович, Свідлер Ігор Давидович
МПК: G01R 25/00
Мітки: пристрій, вимірювання, зсуву, фазового
Формула / Реферат:
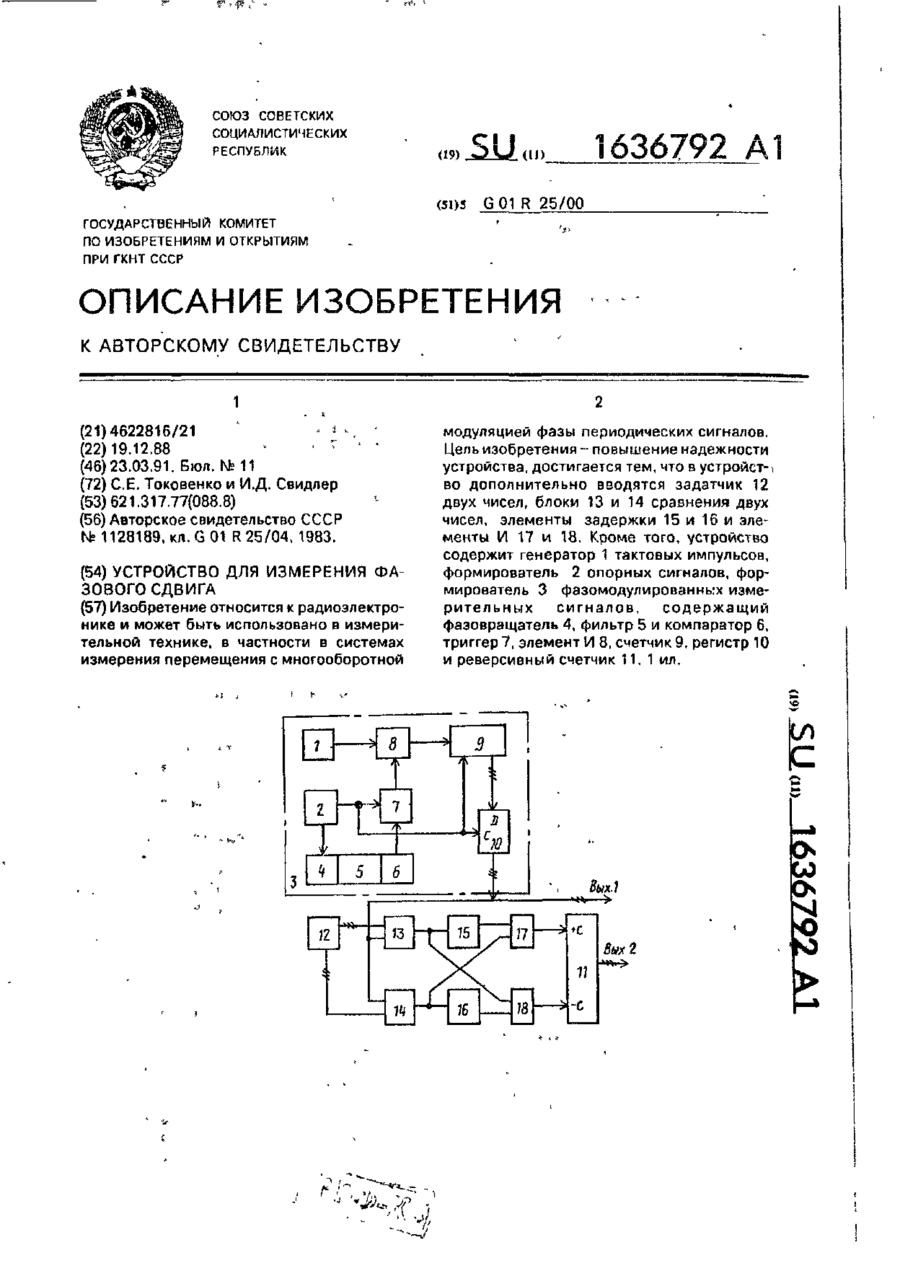
Формула изобретенияУстройство для измерения фазового сдвига, содержащее триггерный фазометр, выход которого является первым выходом устройства и реверсивный счетчик, выход которого является вторым выходом устройства, отличающееся тем, что, с целью повышения надежности устройства, в него дополнительно введены задатчик двух чисел, два блока сравнения двух чисел, два элемента задержки и два элемента И, причем выход триггерного фазометра...
Електронні цифрові ваги
Номер патенту: 2842
Опубліковано: 26.12.1994
Автори: Панфілов Іван Павлович, Раздобаров Віктор Георгійович, Іванченко Володимир Давидович, Гребенюков Анатолій Васильович, Павліч Ілля Васильович, Воровйова Олена Михайлівна, Сиром'яський Вадим Олексійович, Горлов Генадій Васильович
МПК: G01G 23/00, G01G 23/18
Мітки: електронні, цифрові, ваги
Формула / Реферат:
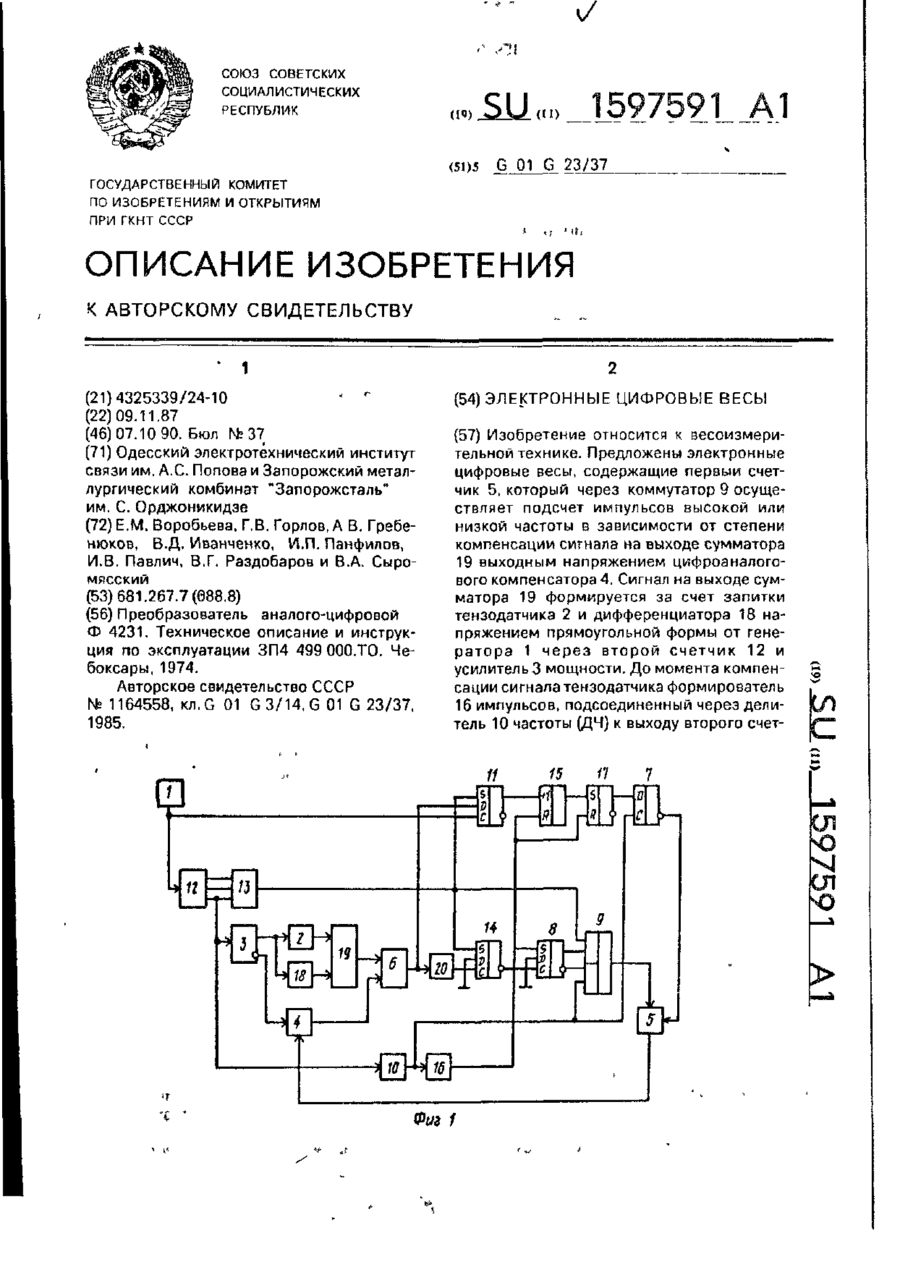
Электронные цифровые весы, содержащие генератор, тензодатчик, цифро-аналоговый компенсатор, управляющие входы которого подсоединены к выходам первого счетчика, выход — к первому входу нуль-органа, блок-реверса, выход которого соединен с входом реверсирования первого счетчика, первый триггер, выходы которого соединены с управляющими входами коммутатора, один из сигнальных входов которого подсоединен к выходу делителя частоты, а выход...
Пристрій дистанційного керування по лініях електропередачі
Номер патенту: 3501
Опубліковано: 27.12.1994
Автори: Вовк Валентин Миколайович, Велігоцький Георгій Павлович, Тимошенко Володимир Аврамович, Хомяк Володимир Антонович, Кот Анатолій Григорович, Сандрацький Микола Васильович, Головатюк Микола Пилипович
МПК: H02J 13/00, G08C 19/28
Мітки: пристрій, дистанційного, керування, електропередачі, лініях
Формула / Реферат:
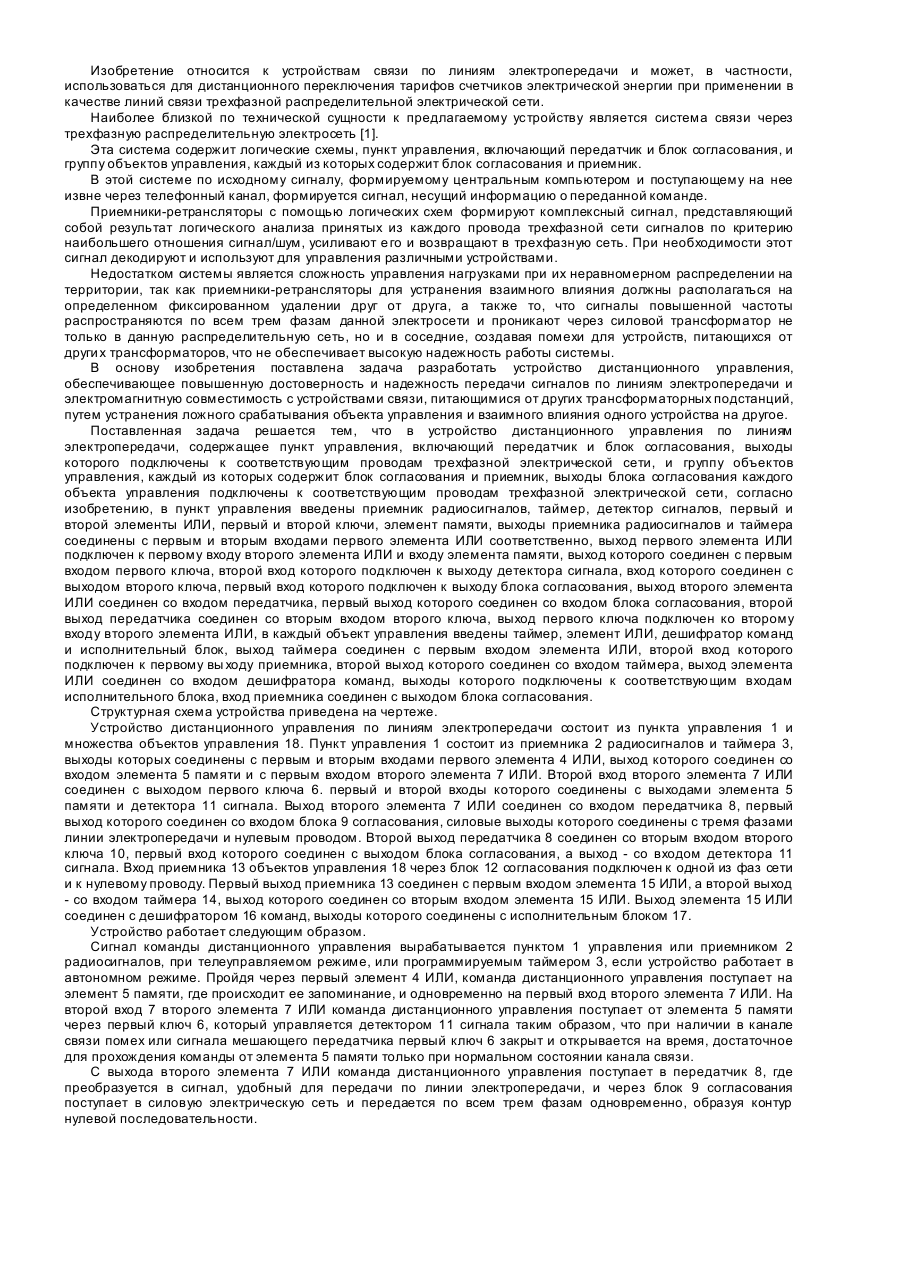
Устройство дистанционного управления по линиям электропередачи, содержащее пункт управления, включающий передатчик и блок согласования, выходы которого подключены к соответствующим проводам трехфазной электрической сети, и группу объектов управления, каждый из которых содержит блок согласования и приемник, выходы блока согласования каждого объекта управления подключены к соответствующим проводам трехфазной электрической сети, отличающееся...
Попередній патент: Валковий млин
Наступний патент: Зрошувальний теплообмінник
Випадковий патент: Регулятор температури