Агромостовий комплекс для культивації рослин, посаджених рядками
Номер патенту: 58057
Опубліковано: 25.03.2011
Автори: Пилипака Сергій Федорович, Кресан Тетяна Анатоліївна, Надикто Володимир Трофимович
Формула / Реферат
Агромостовий комплекс для культивації рослин, посаджених рядками, до складу якого входить агроміст із брусами і закріпленими на них рухомими культиваторними лапами, який відрізняється тим, що при прямолінійному русі комплексу із швидкістю ![]() дві спарені плоскі культиваторні лапи обертаються у ґрунті навколо вертикальних осей, що проходять через їх центр перпендикулярно до площин лап із рівними кутовими швидкостями у протилежних напрямках, які визначаються із виразу
дві спарені плоскі культиваторні лапи обертаються у ґрунті навколо вертикальних осей, що проходять через їх центр перпендикулярно до площин лап із рівними кутовими швидкостями у протилежних напрямках, які визначаються із виразу ![]() , де
, де ![]() - радіус, що обмежує довжину лапи, до того ж привід обертального руху лап здійснюється від опорних коліс комплексу через редуктори із передаточним числом, що забезпечує співвідношення між швидкістю
- радіус, що обмежує довжину лапи, до того ж привід обертального руху лап здійснюється від опорних коліс комплексу через редуктори із передаточним числом, що забезпечує співвідношення між швидкістю ![]() прямолінійного руху комплексу і обертальним рухом спарених лап у протилежні сторони із рівними кутовими швидкостями
прямолінійного руху комплексу і обертальним рухом спарених лап у протилежні сторони із рівними кутовими швидкостями ![]() за формулою
за формулою ![]() , де величина
, де величина ![]() культиваторної лапи визначається із виразу
культиваторної лапи визначається із виразу ![]() , де
, де ![]() - відстань між рослинами в рядку,
- відстань між рослинами в рядку, ![]() .
.
Текст
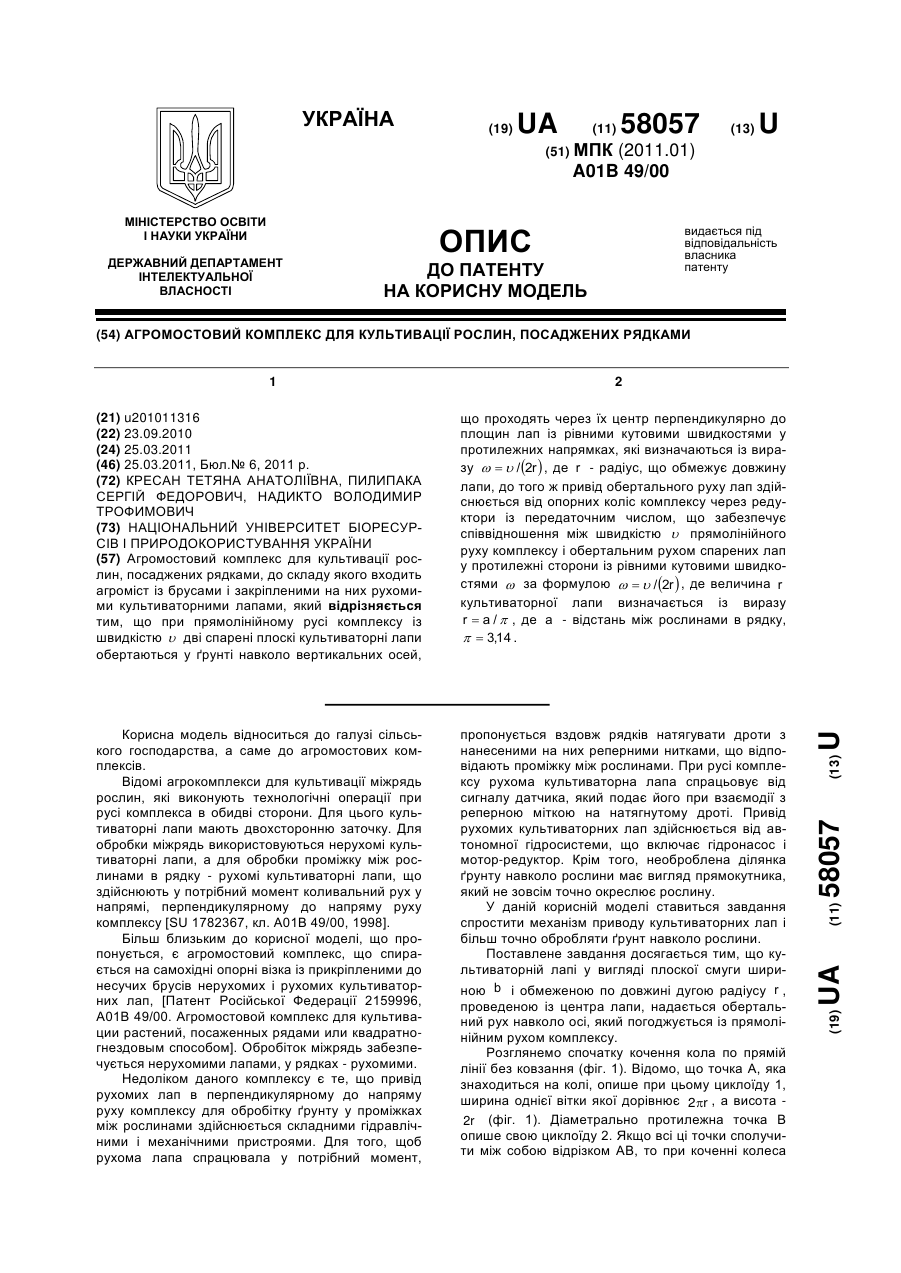
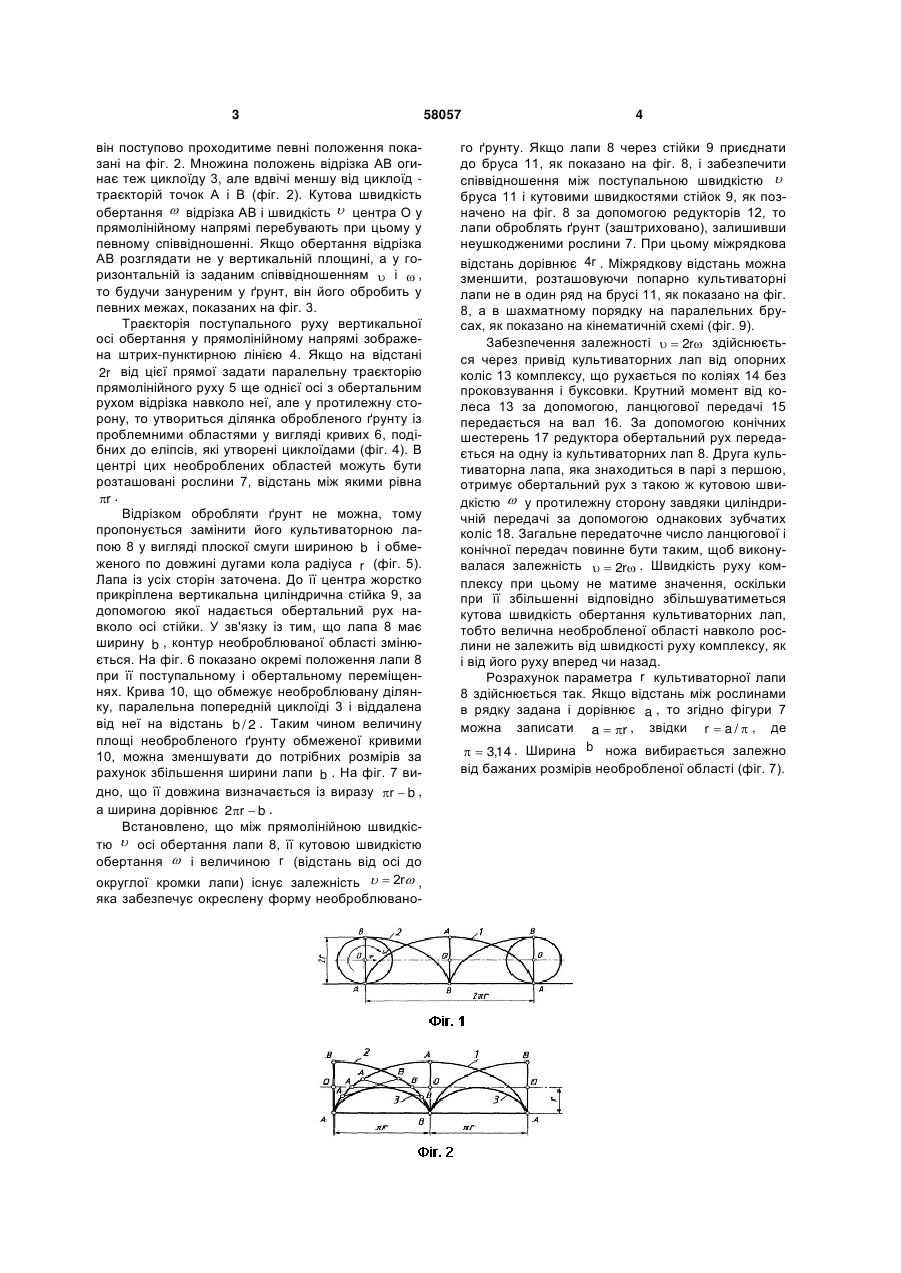
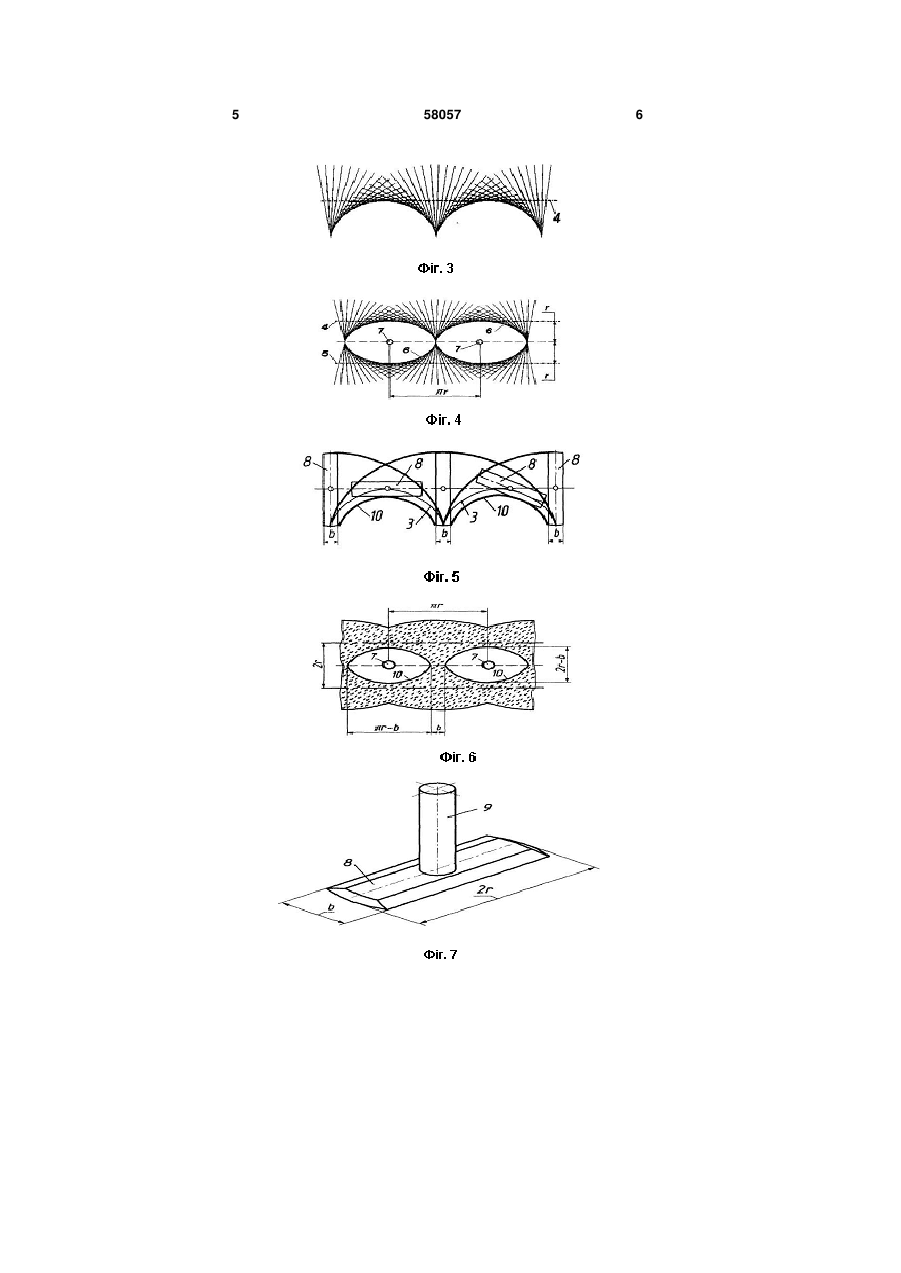
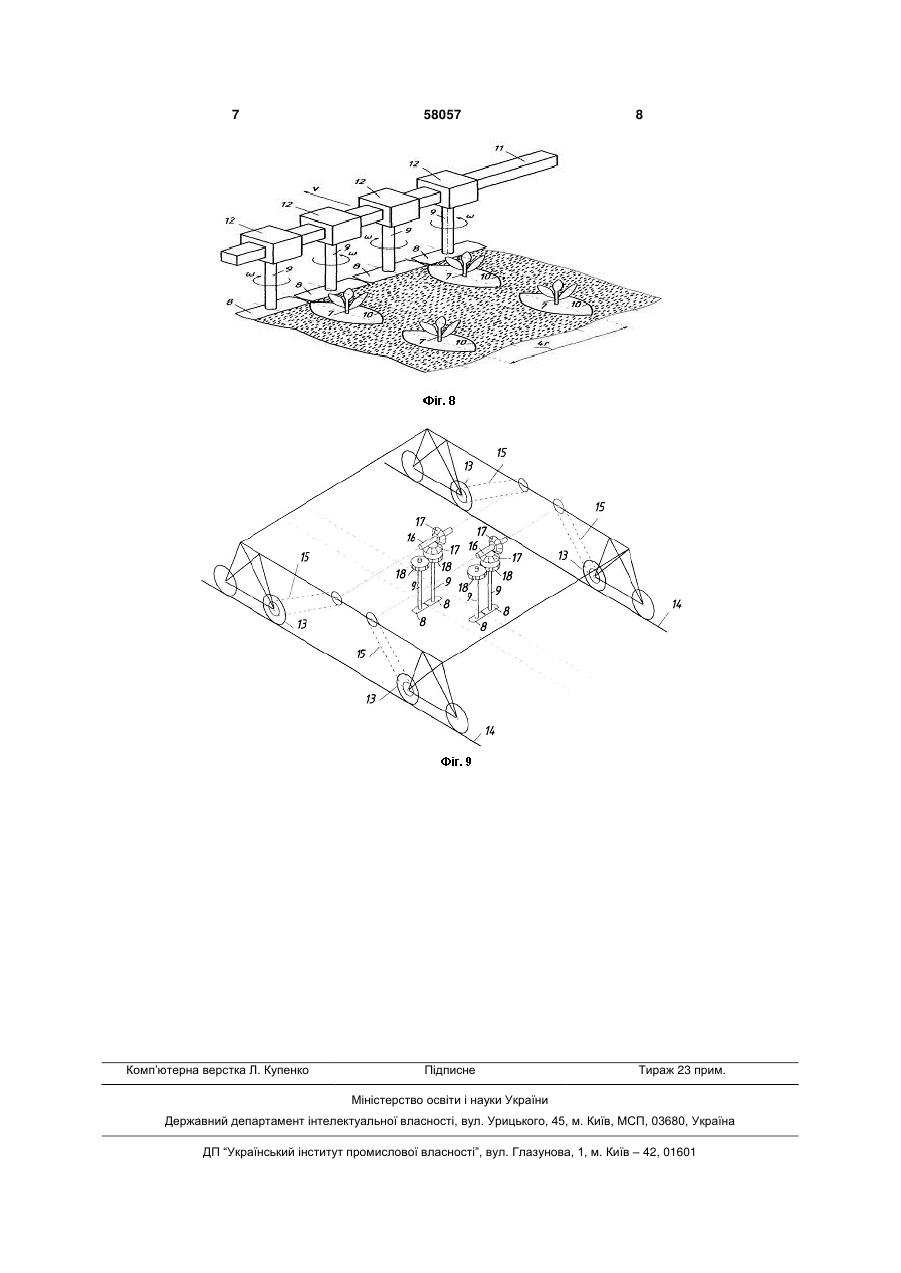
Агромостовий комплекс для культивації рослин, посаджених рядками, до складу якого входить агроміст із брусами і закріпленими на них рухомими культиваторними лапами, який відрізняється тим, що при прямолінійному русі комплексу із швидкістю дві спарені плоскі культиваторні лапи обертаються у ґрунті навколо вертикальних осей, 3 він поступово проходитиме певні положення показані на фіг. 2. Множина положень відрізка АВ огинає теж циклоїду 3, але вдвічі меншу від циклоїд траєкторій точок А і В (фіг. 2). Кутова швидкість обертання відрізка АВ і швидкість центра О у прямолінійному напрямі перебувають при цьому у певному співвідношенні. Якщо обертання відрізка АВ розглядати не у вертикальній площині, а у горизонтальній із заданим співвідношенням і , то будучи зануреним у ґрунт, він його обробить у певних межах, показаних на фіг. 3. Траєкторія поступального руху вертикальної осі обертання у прямолінійному напрямі зображена штрих-пунктирною лінією 4. Якщо на відстані 2r від цієї прямої задати паралельну траєкторію прямолінійного руху 5 ще однієї осі з обертальним рухом відрізка навколо неї, але у протилежну сторону, то утвориться ділянка обробленого ґрунту із проблемними областями у вигляді кривих 6, подібних до еліпсів, які утворені циклоїдами (фіг. 4). В центрі цих необроблених областей можуть бути розташовані рослини 7, відстань між якими рівна r . Відрізком обробляти ґрунт не можна, тому пропонується замінити його культиваторною лапою 8 у вигляді плоскої смуги шириною b і обмеженого по довжині дугами кола радіуса r (фіг. 5). Лапа із усіх сторін заточена. До її центра жорстко прикріплена вертикальна циліндрична стійка 9, за допомогою якої надається обертальний рух навколо осі стійки. У зв'язку із тим, що лапа 8 має ширину b , контур необроблюваної області змінюється. На фіг. 6 показано окремі положення лапи 8 при її поступальному і обертальному переміщеннях. Крива 10, що обмежує необроблювану ділянку, паралельна попередній циклоїді 3 і віддалена від неї на відстань b / 2 . Таким чином величину площі необробленого ґрунту обмеженої кривими 10, можна зменшувати до потрібних розмірів за рахунок збільшення ширини лапи b . На фіг. 7 видно, що її довжина визначається із виразу r b , а ширина дорівнює 2r b . Встановлено, що між прямолінійною швидкістю осі обертання лапи 8, її кутовою швидкістю обертання і величиною r (відстань від осі до округлої кромки лапи) існує залежність 2r , яка забезпечує окреслену форму необроблювано 58057 4 го ґрунту. Якщо лапи 8 через стійки 9 приєднати до бруса 11, як показано на фіг. 8, і забезпечити співвідношення між поступальною швидкістю бруса 11 і кутовими швидкостями стійок 9, як позначено на фіг. 8 за допомогою редукторів 12, то лапи оброблять ґрунт (заштриховано), залишивши неушкодженими рослини 7. При цьому міжрядкова відстань дорівнює 4r . Міжрядкову відстань можна зменшити, розташовуючи попарно культиваторні лапи не в один ряд на брусі 11, як показано на фіг. 8, а в шахматному порядку на паралельних брусах, як показано на кінематичній схемі (фіг. 9). Забезпечення залежності 2r здійснюється через привід культиваторних лап від опорних коліс 13 комплексу, що рухається по коліях 14 без проковзування і буксовки. Крутний момент від колеса 13 за допомогою, ланцюгової передачі 15 передається на вал 16. За допомогою конічних шестерень 17 редуктора обертальний рух передається на одну із культиваторних лап 8. Друга культиваторна лапа, яка знаходиться в парі з першою, отримує обертальний рух з такою ж кутовою швидкістю у протилежну сторону завдяки циліндричній передачі за допомогою однакових зубчатих коліс 18. Загальне передаточне число ланцюгової і конічної передач повинне бути таким, щоб виконувалася залежність 2r . Швидкість руху комплексу при цьому не матиме значення, оскільки при її збільшенні відповідно збільшуватиметься кутова швидкість обертання культиваторних лап, тобто велична необробленої області навколо рослини не залежить від швидкості руху комплексу, як і від його руху вперед чи назад. Розрахунок параметра r культиваторної лапи 8 здійснюється так. Якщо відстань між рослинами в рядку задана і дорівнює a , то згідно фігури 7 можна записати a r , звідки r a / , де 3,14 . Ширина b ножа вибирається залежно від бажаних розмірів необробленої області (фіг. 7). 5 58057 6 7 Комп’ютерна верстка Л. Купенко 58057 8 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAgricultural axle complex for cultivating plants planted by rows
Автори англійськоюKresan Tetiana Anatoliivna, Pylypaka Serhii Fedorovych, Nadykto Volodymyr Trokhymovych
Назва патенту російськоюАгромостовой комплекс для культивации растений, посаженных рядками
Автори російськоюКресан Татьяна Анатольевна, Пилипака Сергей Федорович, Надикто Володимир Трофимович
МПК / Мітки
МПК: A01B 49/00
Мітки: посаджених, культивації, агромостовий, рослин, комплекс, рядками
Код посилання
<a href="https://ua.patents.su/4-58057-agromostovijj-kompleks-dlya-kultivaci-roslin-posadzhenikh-ryadkami.html" target="_blank" rel="follow" title="База патентів України">Агромостовий комплекс для культивації рослин, посаджених рядками</a>
Спосіб загальної культивації кукурудзи і сорго для виробництва силосу
Номер патенту: 3549
Опубліковано: 27.12.1994
Автори: Аттіла Рожаш, Ференц Харангозо, Йозеф Ковач, Йозеф Банфаі, Чаба Лакатош, Йозеф Таці
МПК: A01B 79/00, A01C 7/00, A01B 79/02
Мітки: культивації, сорго, виробництва, спосіб, кукурудзи, загальної, силосу
Формула / Реферат:
1. Способ общей культивации кукурузы и сорго для производства силоса, включающий посев сорго в смеси с кукурузой и совместную их уборку, отличающийся тем, что, с целью повышения урожайности, осуществляют этажное высевание сорго над кукурузой в каждом ряду, а совместную уборку растений проводят, когда водное содержание кукурузы соответствует условиям приготовления силоса.2. Способ по п. 1, отличающийся тем, что высевают кукурузу на...
Спосіб культивації планктонних організмів-фільтраторів ряду cladocera

Номер патенту: 40852
Опубліковано: 27.04.2009
Автори: Жолткевич Григорій Миколайович, Імад Ясін Махмуд Аль-Зайдеін, Жежера Марина Дмитрівна, Беспалов Юрій Гаврилович, Носов Костянтин Валентинович
МПК: A01K 67/033, G01N 33/18
Мітки: культивації, спосіб, організмів-фільтраторів, планктонних, cladocera, ряду
Формула / Реферат:
1. Спосіб культивації планктонних організмів-фільтраторів ряду Cladocera, що включає внесення до замкненої культиваційної ємності з культурою Cladocera підживлювачів, який відрізняється тим, що до культиваційної ємності додатково вміщують живу біомасу нитчастих водоростей.2. Спосіб за п. 1, який відрізняється тим, що частини культиваційної ємності з водоростями і Cladocera розділяють дірчастою стінкою з найбільшим розміром дірок менше...
Фунгіцидний засіб для рослин, спосіб боротьби або запобігання хворобам рослин, матеріал розмноження рослин
Номер патенту: 41864
Опубліковано: 15.10.2001
Автори: Бернхард Штек, Роберт Нюфелер, Ендрю Лідбітер
МПК: A01N 43/36, A01N 43/653
Мітки: матеріал, розмноження, спосіб, рослин, боротьби, фунгіцидний, запобігання, хворобам, засіб
Формула / Реферат:
1. Фунгицидное средство для растений, содержащее в качестве активного ингредиента смесь 1-{2-[2-хлор-4-(4-хлорфенокси)фенил]-4-метил-1,3-диоксолан-2-илметил}-1Н-1,2,4-триазола формулы (I)и производного 1Н-пиррол-3-карбонитрила вместе с целевыми добавками, отличающееся тем, что в качестве производного 1Н-пиррол-3-карбонитрила оно содержит 4-(2,2-дифтор-1,3-бензодиоксол-7-ил)-1Н-пиррол-3-карбонитрил формулы (II)при...
Агрохімічна суміш для захисту рослин від хвороб та комах, композиція, що її містить, спосіб обробки рослин, грунту та продукт розмноження рослин
Номер патенту: 45327
Опубліковано: 15.04.2002
Автори: Жан-Марі Гоуо, Франсіс Молль, Патріс Дювер, Франсуа Колліо
МПК: A01P 7/04, A01N 43/653, A01C 1/08, A01N 43/50, A01P 3/00, A01N 43/56
Мітки: обробки, розмноження, хвороб, комах, спосіб, суміш, агрохімічна, містить, рослин, захисту, продукт, грунту, композиція
Формула / Реферат:
1. Агрохимическая смесь для защиты растений от заболеваний и насекомых, отличающаяся тем, что она содержит, по крайней мере, эффективное количество фунгицида бензилиденазолилметилциклоалканового типа и, по крайней мере, эффективное количество инсектицида с пиразольной, пиррольной или фенилимидазольной группой, причем фунгицид и инсектицид находятся в соотношениях, создающих синергический эффект.2. Смесь по п. 1, отличающаяся тем, что...
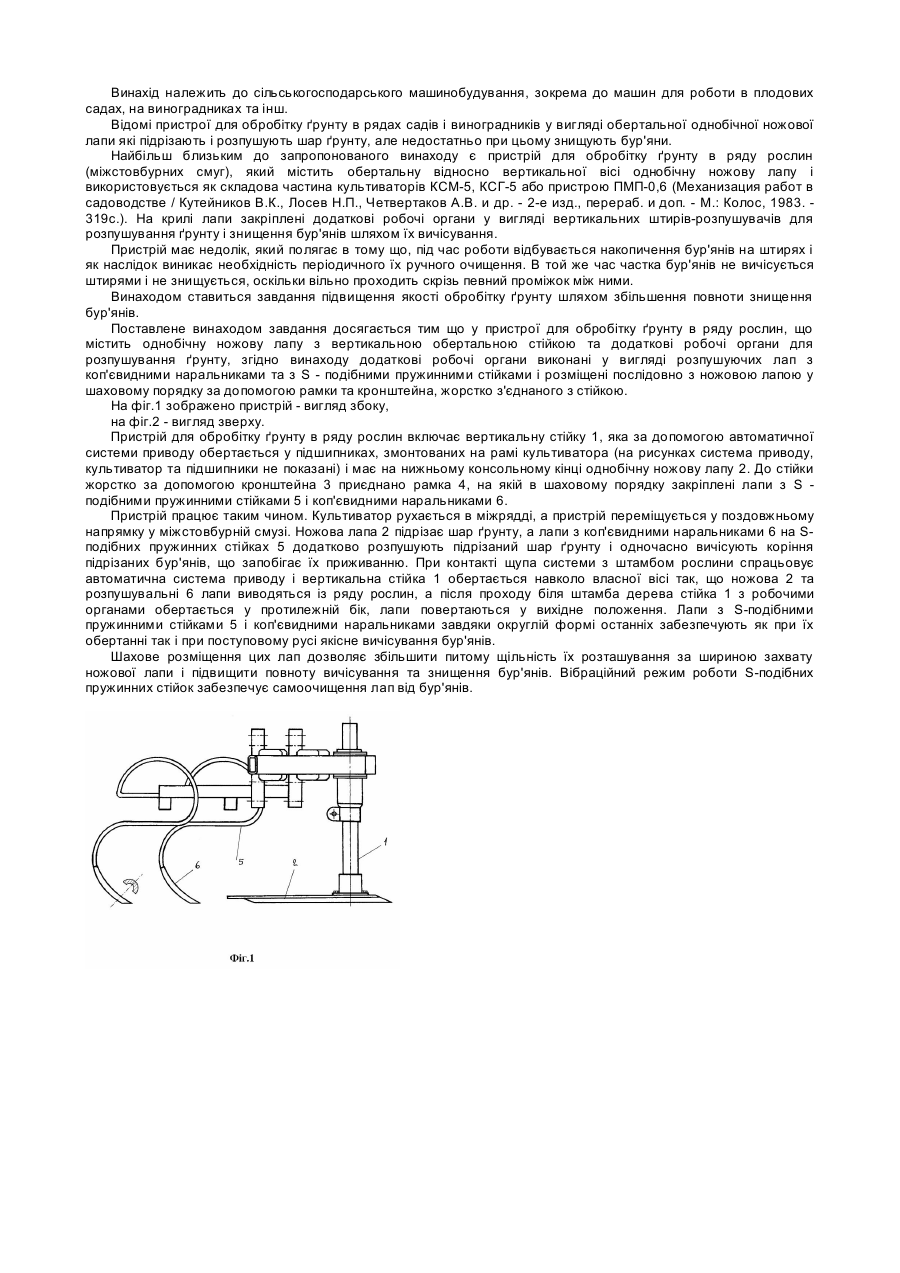
Пристрій для обробітку грунту в ряду рослин
Номер патенту: 67583
Опубліковано: 15.06.2004
Автори: Фришев Сергій Георгійович, Шатров Руслан Володимирович, Демидко Михайло Омелянович
МПК: A01B 39/00
Мітки: ряду, рослин, обробітку, грунту, пристрій
Формула / Реферат:
Пристрій для обробітку грунту в ряду рослин, що містить однобічну ножову лапу з вертикальною обертальною стійкою та додаткові робочі органи для розпушування грунту, який відрізняється тим, що додаткові робочі органи виконані у вигляді розпушуючих лап з списоподібними наральниками та з S-подібними пружинними стійками і розміщені послідовно з ножовою лапою у шаховому порядку за допомогою рамки та кронштейна, жорстко з'єднаного з стійкою.
Попередній патент: Спосіб відновлення роботоздатності колінчатих валів
Наступний патент: Спосіб експрес-діагностики еймеріозу свиней
Випадковий патент: Похідні фактора коагуляції vii