Спосіб виявлення рухомих об’єктів
Номер патенту: 58937
Опубліковано: 26.04.2011
Автори: Саваневич Вадим Євгенійович, Брюховецький Олександр Борисович, Власенко Володимир Петрович, Кожухов Олександр Михайлович, Діков Євген Миколайович
Формула / Реферат
Спосіб виявлення рухомих об'єктів, що включає формування зони виявлення об'єкта, встановлення граничної енергії сигналу, формування в зоні виявлення об'єкта стробів передбачуваного перебування об'єкта, розміри яких визначаються похибками вимірів параметрів сигналу, прийом, фільтрацію і виділення сигналів зі стробів передбачуваного перебування об'єкта за кожний огляд, порівняння енергії сигналів з кожного такого строба з граничною енергією, поділ зони виявлення об'єкта на N стробів, що перетинаються, пошук рухомих об'єктів, які вибрані з умови, що об'єкт не вийде ні з одного з них за Т оглядів, прийом, фільтрацію і виділення сигналів від кожного з N стробів, накопичення енергії виділених сигналів з максимальним її значенням на кожному огляді від кожного з N стробів за Т оглядів, порівняння накопиченої енергії сигналів від кожного строба з першою граничною енергією Еn1, поділ стробів, сигнали в яких мають накопичену енергію, яка перевищує Еn1, на М стробів, розміри яких визначаються похибками вимірів параметрів сигналу, накопичення енергії відібраних сигналів від кожного з М стробів на Т оглядів, вибір з М стробів строба, накопичена енергія сигналів від якого перевищує другу граничну Еn2 та винесення судження про виявлення об'єкта, який відрізняється тим, що накопичення енергії та її порівняння з граничною енергією в стробах пошуку рухомих об'єктів здійснюють для сигналів, про які було винесене судження, що вони не належать об'єктам, нерухомим на Т оглядах, а для винесення судження про належність сигналів об'єктам, нерухомим на Т оглядах, здійснюють порівняння енергії сигналів, що сформовані в однакових стробах передбачуваного перебування об'єкта на різних оглядах, при цьому дані сигналі визнають такими, що належать об'єктам, нерухомим на Т оглядах, якщо енергії даних сигналів перевищують граничну енергію не менше ніж на К з Т оглядів.
Текст
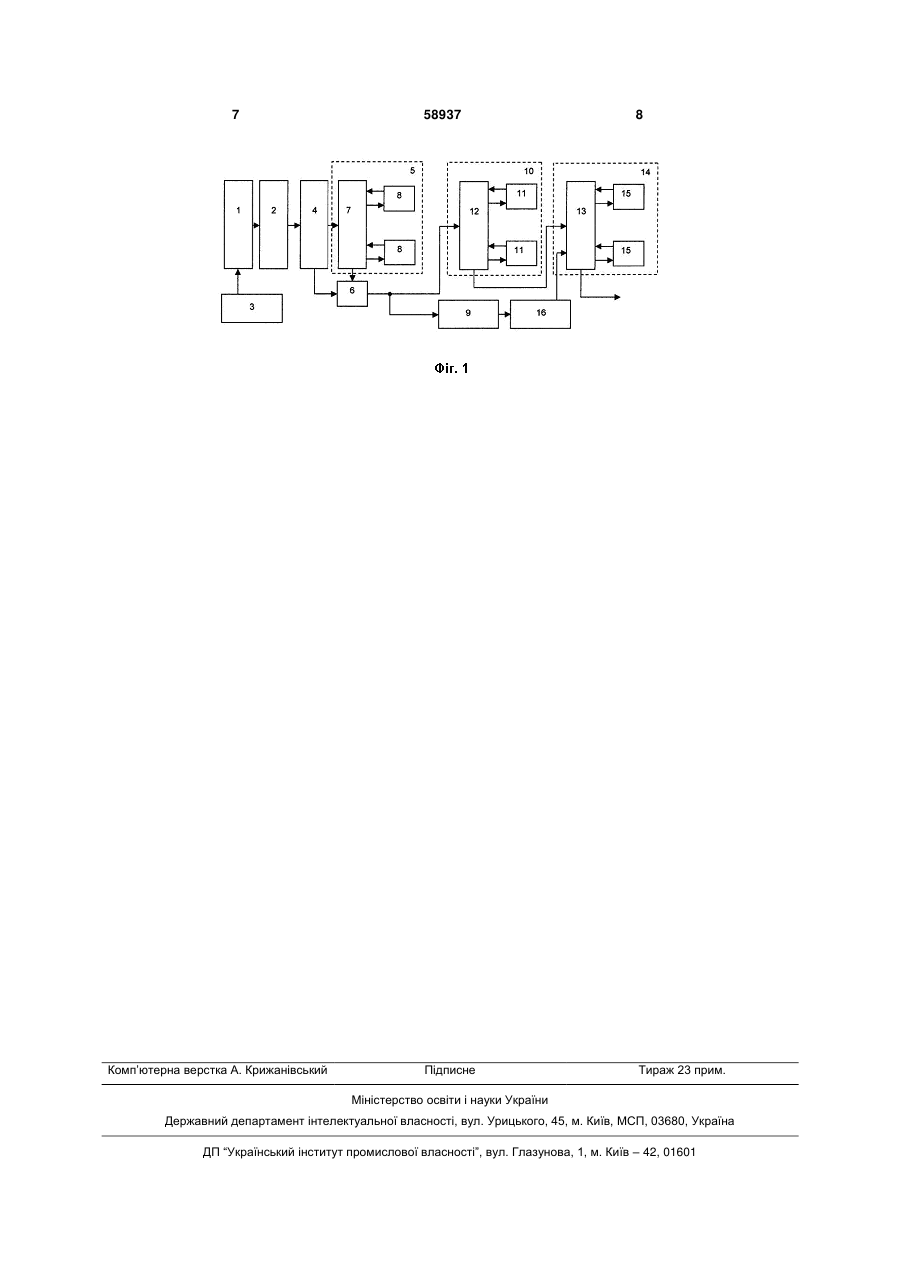
Спосіб виявлення рухомих об'єктів, що включає формування зони виявлення об'єкта, встановлення граничної енергії сигналу, формування в зоні виявлення об'єкта стробів передбачуваного перебування об'єкта, розміри яких визначаються похибками вимірів параметрів сигналу, прийом, фільтрацію і виділення сигналів зі стробів передбачуваного перебування об'єкта за кожний огляд, порівняння енергії сигналів з кожного такого строба з граничною енергією, поділ зони виявлення об'єкта на N стробів, що перетинаються, пошук рухомих об'єктів, які вибрані з умови, що об'єкт не вийде ні з одного з них за Т оглядів, прийом, філь U 2 (19) 1 3 міщається за траєкторією, що виявляється, тобто виноситься судження про виявлення об'єкта. Недоліком відомого способу є застосування способу тільки для виявлення об'єктів з досить високою локаційною контрастністю (високим блиском). При цьому фіксується мала кількість хибних сигналів, завдяки встановленому рівню граничної енергії, що забезпечує умовну імовірність хибної тривоги у стробі 10-5...10-6 Однак за такої умови разом із сигналами шумового походження втрачаються й слабкі корисні сигнали (від далеких або малогабаритних об'єктів в радіолокації, від об'єктів зі слабким блиском в астрономії). Найбільш близьким до пропонованого технічним рішенням, обраним як прототип, є спосіб виявлення рухомих об'єктів [2]. Спосіб [2] передбачає формування зони виявлення об'єкта, завдання граничної енергії сигналу, формування в зоні виявлення стробів передбачуваного перебування об'єкта. Спосіб передбачає також прийом, фільтрацію і виділення сигналів зі стробів передбачуваного перебування об'єкта за кожний огляд, порівняння енергії сигналів з кожного такого строба з граничною енергією, відбір сигналів з енергією, що перевищує граничну та винесення судження про виявлення об'єкта. Формування в зоні виявлення об'єкта стробів здійснюють шляхом розподілу її на N стробів, що перетинаються, які обрані за умови, що об'єкт не вийде з одного з них за Т оглядів. Прийом, фільтрацію й виділення сигналів здійснюють від кожного з N стробів, накопичують енергію сигналів з максимальним її значенням на кожному огляді від кожного з N стробів за Т оглядів, порівняння накопиченої енергії сигналів від кожного строба здійснюють з першою граничною енергією Еn1. Після добору сигналів з накопиченою енергією, що перевищує Еn1, строби, сигнали від яких мають накопичену енергію, що перевищує Еn1, поділяють на М стробів, розміри кожного з яких визначаються похибками виміру параметрів сигналу, накопичують енергію відібраних сигналів від кожного з М стробів за Т оглядів. 3 М стробів вибирають строб, накопичена енергія сигналу від якого перевищує другу граничну енергію Еn2. Формування в зоні виявлення об'єкта стробів шляхом розподілу її на N стробів, що перетинаються, які обрані за умови, що об'єкт не вийде з одного з них за Т оглядів, забезпечує можливість накопичення енергії сигналів уздовж можливих траєкторій руху об'єкта з низькою локаційною контрастністю без відстеження його координат, що змінюються в часі. Накопичення енергії сигналів, що мають максимальну енергію на кожному огляді, від кожного з N стробів за Т оглядів і наступне порівняння накопиченої енергії від кожного з стробів з Еn1, приводить до того, що більшість можливих траєкторій руху об'єкта виключаються з подальшого розгляду, що сприяє підвищенню вірогідності виявлення об'єкта. Наступне ділення початкових N стробів, сигнали від яких мають накопичену енергію, що перевищує Еn1, на М стробів, розміри кожного з яких визначаються похибками виміру параметрів сиг 58937 4 налу, дозволяє при подальшому доборі сигналів звузити ділянку можливої наявності об'єкта. Це дозволяє виявляти об'єкт з низькою локаційною контрастністю в реальному масштабі часу з високою достовірністю. Накопичення енергії відібраних сигналів від кожного з М стробів за Т оглядів і вибір з М стробів такого строба, накопичена енергія сигналу від якого перевищує другу граничну енергію Еn2, обумовлює гранично припустиму достовірність виявлення рухомого об'єкта з низькою локаційною контрастністю, що відповідає достовірності виявлення нерухомого об'єкта. Однак, даний спосіб не дозволяє проводити якісне виявлення рухомих об'єктів у випадку наявності в зоні виявлення великої кількості нерухомих об'єктів, форма сигналів від яких в окремому огляді не відрізняється від форми сигналу від рухомого об'єкта. В основу корисної моделі покладено завдання створити такий спосіб виявлення рухомих об'єктів, який у порівнянні зі способом, обраним як прототип, дозволяв би якісно виявляти рухомі об'єкти у випадку наявності в зоні виявлення великої кількості нерухомих об'єктів, форма сигналів від яких в окремому огляді не відрізняється від форми сигналу від рухомого об'єкта. Рішення поставленого завдання здійснюється в способі виявлення рухомих об'єктів, що передбачає формування зони виявлення об'єкта, завдання граничної енергії сигналу, формування в зоні виявлення стробів передбачуваного перебування об'єкта. Спосіб передбачає також прийом, фільтрацію й виділення сигналів зі стробів передбачуваного перебування об'єкта за кожний огляд, порівняння енергії сигналів з кожного такого строба з граничною енергією, відбір сигналів з енергією, що перевищує граничну й винесення судження про виявлення об'єкта. Формування в зоні виявлення об'єкта стробів здійснюється шляхом розподілу її на N стробів пошуку рухомих об'єктів, що перетинаються, які обрані за умови, що об'єкт не вийде ні з одного з них за Т оглядів. Прийом, фільтрацію й виділення сигналів здійснюють від кожного з N стробів, накопичують енергію сигналів з максимальним її значенням на кожному огляді від кожного з N стробов за Т оглядів, порівняння накопиченої енергії сигналів від кожного строба здійснюють із першою граничною енергією Еn1. Після відбору сигналів з накопиченою енергією, що перевищує Еn1, строби, сигнали від яких мають накопичену енергію, що перевищує Еn1, розподіляють на М стробів, розміри кожного з яких визначаються похибками виміру параметрів сигналу, накопичують енергію відібраних сигналів від кожного з М стробів за Т оглядів. 3 М стробів вибирають строб, накопичена енергія сигналу від якого перевищує другу граничну енергію Еn2. Відповідно корисної моделі, накопичення енергії в стробах пошуку рухомих об'єктів здійснюють тільки для тих сигналів, для яких було винесено судження про те, що вони не належать об'єктам, нерухомим на Т оглядах. Для винесення судження про належність сигналів об'єктам, нерухомим на Т оглядах, здійснюється порівняння енергії сигналів, 5 сформованих у тих самих стробах передбачуваного перебування об'єкта на різних оглядах. Дані сигнали визнаються такими, що належать об'єкту, нерухомому на Т оглядах, якщо їх енергії перевищують граничну енергію не менш, ніж на К із Т оглядів. Проведення попереднього відбраковування сигналів, що належать об'єктам, нерухомим на Т оглядах, дозволяє підвищити вірогідність виявлення рухомого об'єкта, а також значно підвищити швидкість виявлення рухомих об'єктів за рахунок зменшення кількості сигналів, що накопичуються, у випадку наявності в зоні виявлення великої кількості нерухомих об'єктів, форма сигналів від яких в окремому огляді не відрізняється від форми сигналу від рухомого об'єкта. Спосіб може бути реалізований на базі активної або пасивної локаційної станції радіо, оптичного або іншого діапазону, а також телескопу. Технична реалізація способу може здійснюватися наступним чином (Фіг. 1). Станція містить антену (в видимому діапазоні телескоп) 1, з'єднану з блоком керування 2 і приймачем 3. Вихід приймача 3 підключений до буферу сигналів 4, вихід якого підключений до входу блоку виділення сигналів, що не належать нерухомим об'єктам 5, та входу ключа 6. Блок виділення сигналів, що не належать нерухомим об'єктам 5 складається із блоку керування 7, вхід якого підключений до виходу буфера 4 і накопичувачів кількості сигналів 8. Вихід блоку керування 7 підключений до ключа 6. Вихід ключа 6 підключений до входу буфера виділенних сигналів 9 та входу першого блоку накопичувачів 10. Блок накопичувачів 10 містить накопичувачі 11 та блок керування 12, вхід якого підключений до виходу ключа 6, а вихід - до блоку керування 13 другого блоку накопичувачів 14. До складу другого блоку накопичувачів 14 входять накопичувачі 15, які підключені до блоку керування 13. До буферу виділених сигналів 9 підключений блок просторово-часової селекції 16, вихід якого підключений до блоку керування 13. Зона виявлення об'єкта формується за допомогою антени 1 і блоку керування антеною 2. Зону виявлення розподіляють на строби передбачуваного перебування об'єкта, що не перетинаються, та на N стробів пошуку рухомих об'єктів, що перетинаються, шляхом накладення геометричних обмежень на положення сигналів від об'єктів, що виявляються, які випливають з моделі їхнього руху. Зазначені N стробів є просторово-часовими і на кожному огляді вони являють собою відповідні просторові строби. Кожний з N стробів обраний за умовою, що об'єкт не вийде з одного з них за Т оглядів локаційної станції. Розміри стробів передбачуванного перебування об'єкта визначаються похибками вимірів параметрів сигналу. Сигнали від кожного з стробів передбачуваного перебування об'єкта за Т оглядів приймаються антеною 1 і надходять у приймач станції 3, де здійснюється їх фільтрація і виділення шляхом порівняння їх енергії з граничною енергією приймача. Виділені сигнали надходять до буферу 4 звідки надходять на вхід блоку виділення сигналів, що не належать 58937 6 нерухомим об'єктам 5. У блоці виділення сигналів, що не належать нерухомим об'єктам 5 кожному стробу передбачуванного перебування об'єкта відповідає окремий накопичувач кількості сигналів 8. Блок керування 7 здіснює підрахунок кількості сигналів, що надходять з буфера 4 по накопичувачам кількості сигналів 8, які відповідають тому стробу передбачуванного перебування об'єкта, в якому було виявлено даний сигнал. Після розподілу всіх сигналів, що надійшли з буфера 4 блок керування 7 здійснює порівняння кількості накопичених сигналів у накопичувачах кількості сигналів 8 з пороговим значенням кількості К. На вихід блоку керування 7 надходить сигнал, що керує роботою ключа 6. На вихід ключа 6 подаються тільки ті сигнали з буферу 4, що відповідають накопичувачам кількості сигналів 6 з накопиченою кількістю сигналів, меншою ніж порогове значення К. Ці сигнали вважаються такими, що не належать об'єктам, нерухомим на Т оглядах. Сигнали з виходу ключа б надходять до буферу виділених сигналів 9 та на вхід першого блоку накопичувачів 10. Перший блок накопичувачів 10 складається з N накопичувачів 11 та блоку керування 12. Кожний з N накопичувачів 11 накопичує енергію сигналу в одному з N стробів. В блоці керування 12 для кожного виділеного сигналу визначаються всі строби, яким належить сигнал. Для кожного стробу, якщо енергія сигналу перевищує записану раніше у накопичувачі 11 енергію сигналу поточного огляду, блок керування 12 записує в накопичувачі 11 енергію поточного виділеного сигналу. В блоці керування 12 порівнюється накопичена в кожному з накопичувачів 11 за Т оглядів енергія з граничною енергією Еn1. Якщо в якомусь з накопичувачів 11 накопичена енергія перевищує Еn1, відповідний строб поділяється на М вбудованних стробів в блоці керування 13 другого блока накопичувачів 14, який складається з М накопичувачів 15. З буферу виділених сигналів 9 за допомогою блока просторово-часової селекції 16 відбираються виділені сигнали, які належать стробу з накопиченою енергією, що перевищує Еn1. Для кожного з вказаних сигналів в блоці керування 13 визначаються всі вбудовані строби , яким належить сигнал, та записується їх енергія у відповідні накопичувачі 15. В блоці керування 13 порівнюється накопичена в кожному з накопичувачів 15 за Т оглядів енергія сигналів з граничною енергією Еn2 При її перевищенні з блока керування 13 видається сигнал про виявлення об'єкта з параметрами руху. Таким чином, завдяки виключенню з обробки сигналів від об'єктів, нерухомих на Т оглядах, пропонований спосіб дозволяє підвищити достовірність виявлення рухомого об'єкта, а також значно підвищити швидкість обробки за рахунок зменшення кількості сигналів, що накопичують, у випадку наявності в зоні виявлення великої кількості нерухомих об'єктів, форма сигналів від яких, в окремому огляді, не відрізняється від форми сигналу від рухомого об'єкта. Джерела інформації 1. Кузьмин С.3. Цифровая радиолокация. М., Радио, 2000, с. 183-184 2. Патент України №80712, G01S 19/00, 2006. 7 Комп’ютерна верстка А. Крижанівський 58937 8 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for reveal of movable objects
Автори англійськоюSevanevych Vadym Yevheniiovych, Kozhukhov Oleksandr Mykhailovych, Briukhovetskyi Oleksandr Borysovych, Dikov Yevhen Mykolaiovych, Vlasenko Volodymyr Petrovych
Назва патенту російськоюСпособ выявления подвижных объектов
Автори російськоюСаваневич Вадим Евгеньевич, Кожухов Александр Михайлович, Брюховецкий Александр Борисович, Диков Евгений Николаевич, Власенко Владимир Петрович
МПК / Мітки
МПК: G01S 7/523, G01S 17/66
Мітки: виявлення, спосіб, об'єктів, рухомих
Код посилання
<a href="https://ua.patents.su/4-58937-sposib-viyavlennya-rukhomikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб виявлення рухомих об’єктів</a>
Спосіб виявлення рухомих об’єктів
Номер патенту: 80712
Опубліковано: 25.10.2007
Автори: Саваневич Вадим Євгенович, Деденок Віктор Петрович, Шульга Олександр Васильович
МПК: G01S 13/00
Мітки: рухомих, виявлення, об'єктів, спосіб
Формула / Реферат:
Спосіб виявлення рухомих об'єктів, що включає формування зони виявлення об'єкта, встановлення граничної енергії сигналу, формування в зоні виявлення стробів передбачуваного перебування об'єкта, прийом, фільтрацію і виділення сигналів із стробів передбачуваного перебування об'єкта за кожний огляд, порівняння енергії сигналів з кожного такого строба з граничною енергією, відбір сигналів з енергією, яка перевищує граничну, прийняття рішення про...
Пристрій для виявлення рухомих об’єктів
Номер патенту: 2285
Опубліковано: 26.12.1994
Автори: Кондратик Володимир Васильович, Усик Іван Федорович
МПК: G01S 13/56
Мітки: об'єктів, виявлення, пристрій, рухомих
Формула / Реферат:
Устройство для обнаружения движущихся объектов, содержащее сверхвысокочастотный (СВЧ) излучатель-приемник, содержащий резонансную камеру с диодом Ганна и приемный СВЧ-элемент, выход которого через фильтр сигнала с частотой доплеровского сдвига соединен с входом усилителя переменного напряжения, пороговый блок, вход которого соединен с выходом фильтра переменного напряжений, выход порогового блока соединен с входом блока задержки, выход...
Бортовий секвентний радіолокатор для виявлення рухомих цілей на поверхні землі
Номер патенту: 17458
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 13/06
Мітки: секвентний, рухомих, поверхні, бортовий, цілей, виявлення, радіолокатор, землі
Формула / Реферат:
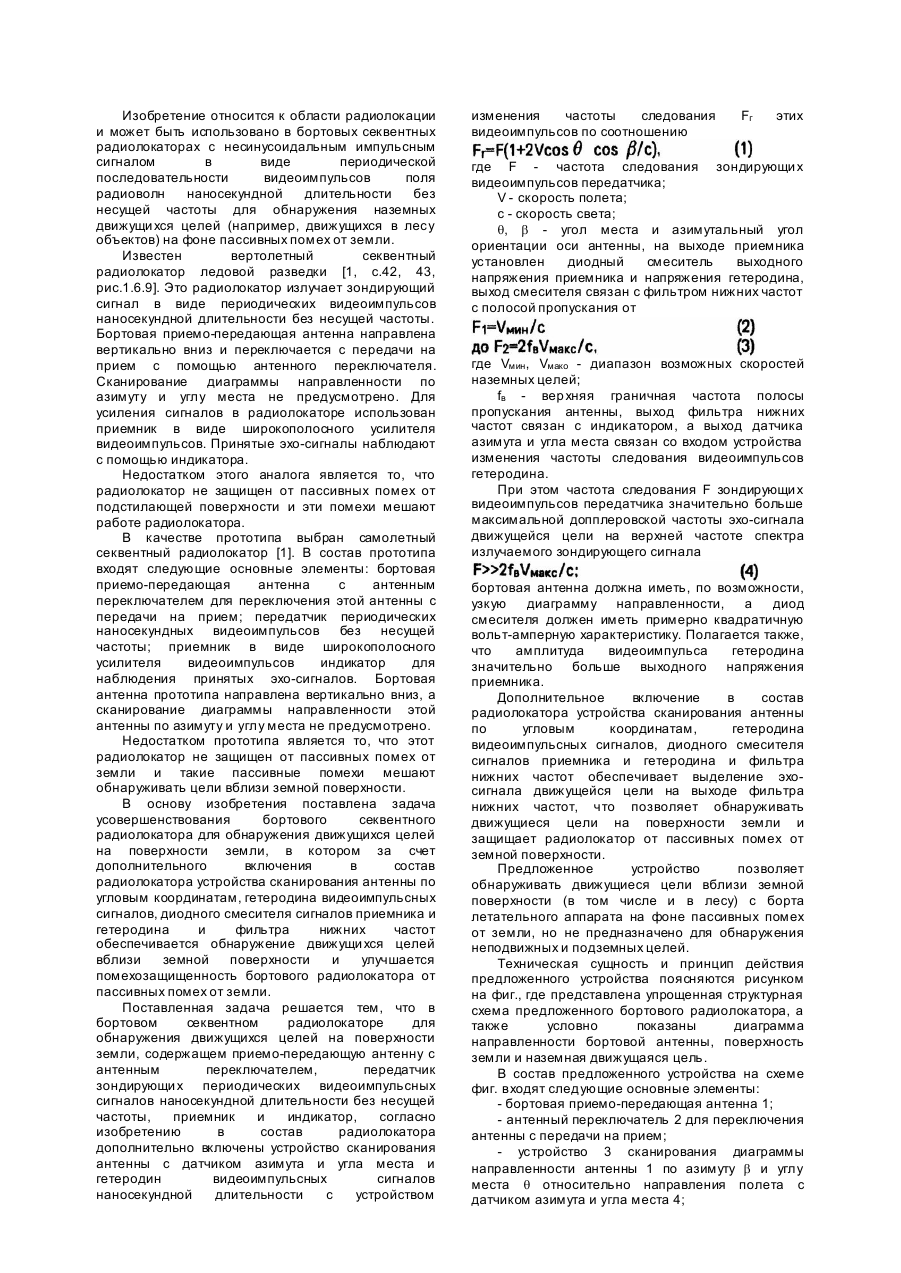
Бортовой секвентный радиолокатор для обнаружения движущихся целей на поверхности земли, содержащий приемо-передающую антенну с антенным переключателем, передатчик зондирующих периодических видеоимпульсных сигналов наносекундной длительности без несущей частоты, приемник и индикатор, отличающийся тем, что в состав радиолокатора дополнительно включены устройство сканирования антенны с датчиком азимута и угла места и гетеродин видеоимпульсных...
Спосіб виявлення порушників території, що охороняється
Номер патенту: 51796
Опубліковано: 26.07.2010
Автори: Костина Олег Миколайович, Башкиров Олександр Миколайович, Сорока Марія Василівна, Комаров Володимир Олександрович, Сендецький Микола Миколайович
Мітки: виявлення, порушників, охороняється, спосіб, території
Формула / Реферат:
Спосіб виявлення порушників території, що охороняється, при якому контрольовану територію обладнують двома основними каналами сканування, кожний з яких містить вузькоспрямовану антену тепловізора, блок сканування та блок обробки сигналу, а також обчислювальним пристроєм, індикатором і лініями зв'язку, забезпечують послідовний зв'язок між антеною тепловізора, блоком обробки сигналу та обчислювальним пристроєм за допомогою ліній зв'язку,...
Спосіб визначення координат рухомих об’єктів і пристрій для його здійснення

Номер патенту: 56102
Опубліковано: 15.04.2003
Автори: Колесніков Олександр Віталійович, Масеха Олег Петрович, Яковлєв Олександр Васильович
МПК: G08B 25/00
Мітки: координат, рухомих, пристрій, спосіб, об'єктів, здійснення, визначення
Формула / Реферат:
1. Спосіб визначення координат рухомих об'єктів, що включає послідовне випромінювання за допомогою абонентського сигналізатора, встановленого на рухомому об'єкті, кодового керуючого й адресного кодового сигналів, прийом і обробку цих сигналів на не менш ніж трьох базисних станціях, розміщених у точках з відомими координатами, передачу по каналу зв'язку й обробку отриманих даних, який відрізняється тим, що кожна з базисних станцій, після...
Попередній патент: Приймальний канал телескопа пересувного лазерного для лазерної локації штучних супутників землі
Наступний патент: Спосіб лікування посттравматичної епілепсії у віддаленому періоді легкої черепно-мозкової травми
Випадковий патент: Екзотермічна суміш