Спосіб визначення розміщення струмопровідної комунікації
Формула / Реферат
1. Спосіб визначення розміщення струмопровідної комунікації, за яким переміщують точку спостереження, спостерігають за змінами компоненти вектора напруженості магнітного поля, створеного струмом, що протікає вздовж комунікації, за максимумом компоненти поля визначають азимутальну орієнтацію відносно комунікації, який відрізняється тим, що точку спостереження переміщують по коловій траєкторії заданого радіуса, вибирають на траєкторії початок відліку кутового переміщення, спостерігають за змінами дотичної до траєкторії компоненти напруженості магнітного поля, створеного струмом комунікації, орієнтують площину траєкторії перпендикулярно поверхні землі, повертають колову траєкторію точки спостереження навколо вертикальної осі до досягнення найбільшого значення максимуму дотичної до траєкторії компоненти поля, за місцем максимуму визначають напрям на комунікацію, визначають положення точок на коловій траєкторії з мінімальними (нульовими) значеннями дотичної компоненти поля, визначають центральний кут між цими точками, визначають бісектрису центрального кута і азимут бісектриси відносно початку відліку кутового переміщення, за бісектрисою цього центрального кута визначають напрям "на вісь" комунікації з центра траєкторії точки спостереження, повертають площину траєкторії навколо напряму на вісь трубопроводу до досягнення найбільших значень максимумів спостережуваної компоненти поля, повертають площину траєкторії навколо лінії, що лежить у площині траєкторії перпендикулярно напряму "на вісь" комунікації, до досягнення мінімального значення центрального кута між точками колової траєкторії з нульовими значеннями дотичної до траєкторії компоненти поля, за нормаллю до траєкторії у цьому положенні визначають напрям осі комунікації, за значеннями мінімального центрального кута ![]() і радіуса траєкторії
і радіуса траєкторії ![]() визначають віддаль
визначають віддаль ![]() від центра колової траєкторії точки спостереження до осі комунікації за формулою:
від центра колової траєкторії точки спостереження до осі комунікації за формулою:
![]()
2. Спосіб за п. 1, який відрізняється тим, що додатково по коловій траєкторії спостерігають перпендикулярну площині траєкторії компоненту магнітного поля, створеного струмом, що протікає вздовж комунікації, і за рівністю нулю цієї компоненти поля контролюють ортогональність площини траєкторії точки спостереження до осі комунікації.
Текст
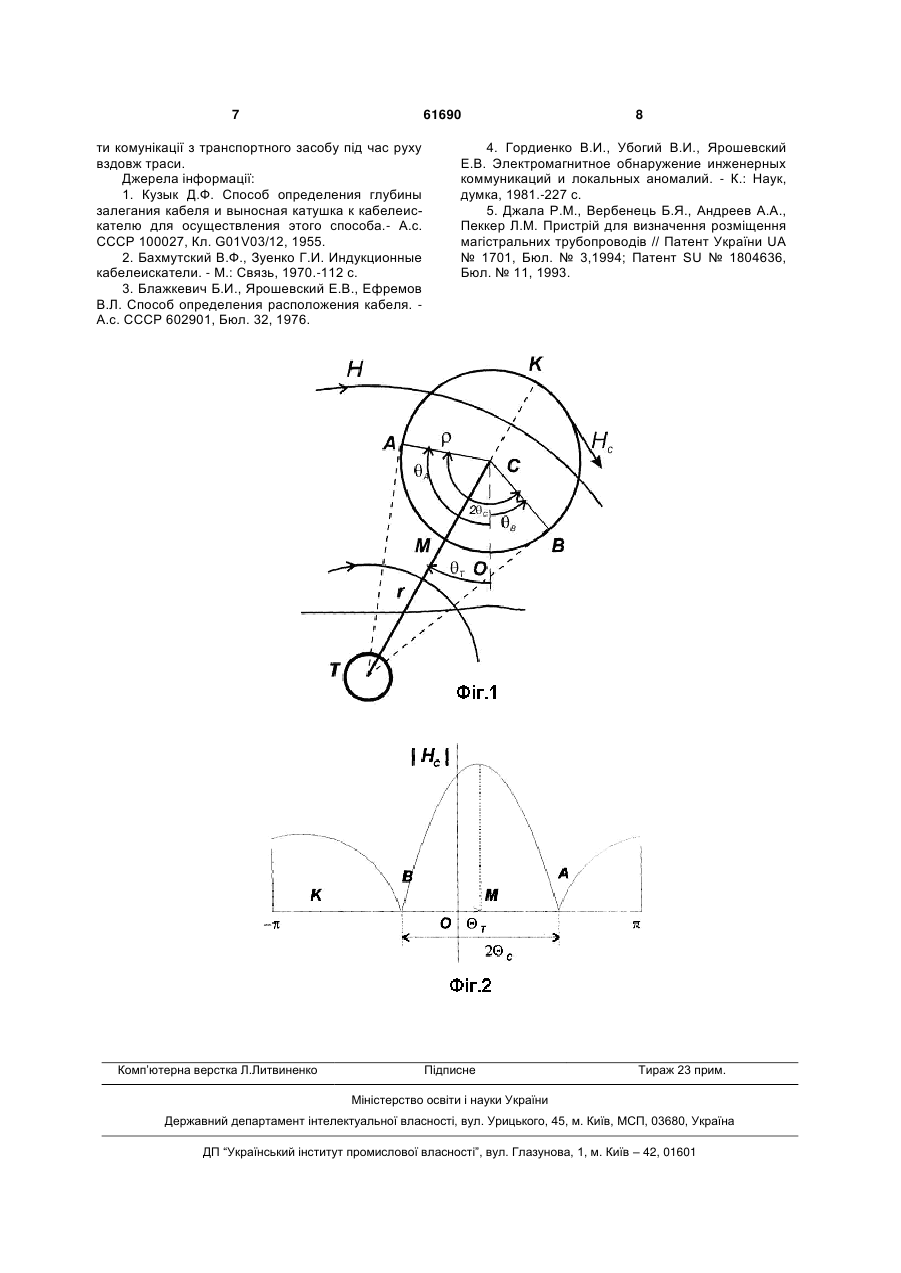
1. Спосіб визначення розміщення струмопровідної комунікації, за яким переміщують точку спостереження, спостерігають за змінами компоненти вектора напруженості магнітного поля, створеного струмом, що протікає вздовж комунікації, за максимумом компоненти поля визначають азимутальну орієнтацію відносно комунікації, який відрізняється тим, що точку спостереження переміщують по коловій траєкторії заданого радіуса, вибирають на траєкторії початок відліку кутового переміщення, спостерігають за змінами дотичної до траєкторії компоненти напруженості магнітного поля, створеного струмом комунікації, орієнтують площину траєкторії перпендикулярно поверхні землі, повертають колову траєкторію точки спостереження навколо вертикальної осі до досягнення найбільшого значення максимуму дотичної до траєкторії компоненти поля, за місцем максимуму визначають напрям на комунікацію, визначають положення точок на коловій траєкторії з мінімальними (нульовими) значеннями дотичної компоненти поля, визначають центральний кут між цими U 2 61690 1 3 від магнітоприймачів та віддаллю між ними визначають розміщення комунікації відносно сприймачів поля та глибину залягання комунікації [4]. Суттєвим недоліком відомого способу при його використанні для контролю розміщення комунікації є відсутність процедури орієнтації магнітоприймачів перпендикулярно комунікації, точний напрям якої апріорі невідомий, що спричиняє методичні похибки і знижує достовірність результатів. Крім цього, потреби вимірювання чотирьох величин та визначення їх відношення, фаз, суми чи різниці, оберненого значення спричинюють апаратурні похибки і ускладнюють реалізацію способу та його практичне використання. Найближчим до заявленого є спосіб визначення розміщення магістральних трубопроводів, описаний у [5], згідно з яким переміщують по місцевості однокомпонентний сприймач (датчик) магнітного поля. По зв'язаному з ним індикатору спостерігають за змінами магнітного поля, яке створене струмом, що протікає вздовж трубопроводу і спричинює сигнали датчика. Переміщення датчика по місцевості здійснює оператор, утримуючи його в руці і здійснюючи коливні рухи. Повертають датчик у горизонтальній площині до мінімального сигналу, який відповідає орієнтації датчика вздовж трубопроводу. Повертають датчик у вертикальній площині, перпендикулярній трубопроводу, визначають місцезнаходження труби за мінімумом і максимумом сигналу, які відповідають орієнтації датчика "на вісь" труби і азимутально до неї (перпендикулярно осі і радіусу труби) відповідно. Переміщують датчик поперек траси трубопроводу, визначають проекцію осі труби на поверхню землі за максимумом горизонтальної і уточнюють цю проекцію за мінімумом вертикальної компонент поля. За віддаллю між мінімумом і максимумом вертикальної компоненти грубо оцінюють глибину залягання труби. Для більш точного визначення глибини залягання труби орієнтують датчик під кутом 45° до вертикалі і переміщують його горизонтально перпендикулярно трубопроводу (від проекції його осі на поверхню) до точки досягнення мінімуму сигналу; за довжиною цього переміщення визначають віддаль від лінії переміщення до осі труби. Недоліком цього способу (прототипу) є використання різних орієнтацій сприймача магнітного поля відносно лінії переміщення та різні маніпулювання у різних зонах спостереження, що спричиняє похибки та ускладнює процедуру визначення розміщення трубопроводу. Технічною задачею, яку розв'язує корисна модель, є створення процедури (послідовності дій) контролю напряму і місця залягання захованого підземного трубопроводу шляхом вибору типу переміщень точки спостереження і критеріїв оцінки, при зменшенні методичних похибок, з метою забезпечення достовірного і оперативного визначення розміщення комунікації. Поставлена задача вирішується шляхом переміщення точки спостереження у просторі. Спостерігають за змінами компоненти магнітного поля, створеного електричним струмом, що протікає вздовж трубопроводу, за максимумом компоненти 61690 4 поля визначають азимутальну орієнтацію відносно комунікації, додатково здійснюють переміщення точки спостереження по коловій траєкторії заданого радіуса, вибирають на траєкторії початок відліку кутового переміщення точки спостереження, спостерігають за змінами дотичної до траєкторії (азимутальної відносно точки спостереження) компоненти напруженості магнітного поля, створеного струмом комунікації, орієнтують площину траєкторії перпендикулярно поверхні землі, повертають траєкторію навколо вертикальної осі до досягнення максимального значення спостережуваної компоненти поля, за місцем максимального значення компоненти поля на траєкторії визначають напрям на комунікацію з центру траєкторії точки спостереження, визначають положення точок на траєкторії з мінімальними (нульовими) значеннями компоненти поля, визначають центральний кут між цими точками (відносно центру траєкторії), визначають бісектрису центрального кута і її азимут відносно початку відліку кутового переміщення точки спостереження по траєкторії, за азимутом бісектриси визначають напрям на вісь комунікації (азимут) з центра траєкторії, повертають площину траєкторії навколо напряму на вісь комунікації до досягнення найбільших значень максимумів спостережуваної компоненти поля (це відповідає азимутальній відносно труби орієнтації дотичної в двох точках траєкторії), повертають площину траєкторії навколо лінії, що лежить у площині траєкторії перпендикулярно напряму на вісь комунікації, до досягнення мінімального значення центрального кута між точками траєкторії з нульовими значеннями дотичної до траєкторії компоненти поля (цим добиваються уточнення ортогонального положення площини траєкторії відносно осі комунікації, яке потрібне у випадку відхилення залягання комунікації від горизонтального), за нормаллю до траєкторії у цьому положенні визначають напрям осі комунікації (у просторі), а за досягнутим мінімальним значенням центрального кута 2c і заданим радіусом траєкторії визначають віддаль r від центра колової траєкторії точки спостереження до осі комунікації за формулою: r / cos c . (1) Додатково, з метою забезпечення неперервного контролю правильності орієнтації кругової траєкторії точки спостереження відносно комунікації, спостерігають перпендикулярну до площини траєкторії компоненту магнітного поля, створеного струмом, що протікає вздовж комунікації, і за рівністю нулю цієї перпендикулярної до площини траєкторії компоненти поля перевіряють ортогональність площини траєкторії до осі комунікації. Суттєвими відмінностями заявленого способу від аналогів і прототипу є переміщення точки спостереження по коловій траєкторії, визначення на ній центрального кута між точками мінімумів дотичної компоненти поля та бісектриси цього кута, визначення за бісектрисою напряму на вісь (азимуту) комунікації, повороти площини траєкторії до найбільшого значення максимумів компоненти 5 61690 поля та до найменшого центрального кута, визначення напряму комунікації за нормаллю до площини траєкторії, визначення віддалі від центра траєкторії до осі труби за центральним кутом і радіусом траєкторії, контроль ортогональності траєкторії до комунікації за нулем перпендикулярної до площини траєкторії компоненти спостережуваного поля. Названі суттєві ознаки заявленого способу і їх сукупність не відомі ні у аналогах ні у прототипі, отже відповідають критерію "новизна". На фіг. 1 показана схема розміщення траєкторії точки спостереження відносно комунікації та компоненти магнітного поля, створеного струмом, що протікає вздовж комунікації; на фіг. 2 - епюра дотичної до траєкторії компоненти вектора напруженості магнітного поля при переміщенні точки спостереження по коловій траєкторії. На схемі подані захована комунікація - підземний трубопровід Т, колова траєкторія переміщення точки спостереження з центром С та радіусом , силові лінії магнітного поля H, створеного струмом комунікації, та дотична до траєкторії компонента поля Нс; точки на траєкторії: А, В - з мінімальними (нульовими) значеннями дотичної компоненти поля та М, К - з максимальними (екстремальними) значеннями дотичної до траєкторії компоненти магнітного поля; центральний кут АСВ величиною 2c та його бісектриса СТ відхилена відносно вертикалі на кут Т, місце точок А і В на траєкторії описується відносно вертикалі кутами А і -В відповідно. Віддаль між центром траєкторії і віссю труби СТ=r та кут Т між бісектрисою центрального кута і вертикаллю є координатами комунікації відносно центру траєкторії точки спостереження. На епюрі (фіг. 2) по осі абсцис відкладено кут переміщення точки спостереження по коловій траєкторії відносно її найнижчої точки (вертикального радіуса), по осі ординат - значення дотичної до траєкторії компоненти магнітного поля, створеного струмом, що протікає вздовж комунікації (при використанні змінного струму як джерело магнітного поля, в епюрі маються на увазі амплітудні значення спостережуваної компоненти поля). Літерні позначення на епюрі відповідають позначенням схеми. Фізичною основою заявленого способу є концентричний характер розподілу магнітного поля струму навколо комунікації (струмопроводу) та рівність нулю дотичної до вибраної траєкторії компоненти поля у моменти проходження дотичної до траєкторії прямої через вісь труби, що є наслідком взаємної ортогональності дотичної до кола та радіуса, проведеного в точку дотику. Як видно з фіг. 1 і 2, центральний кут: 2С = А-в. (2) Азимут бісектриси цього кута: T =(А+в)/2. (3) 6 Зі співвідношення сторін прямокутного трикутника CAT отримуємо формулу (1) для визначення віддалі між центром траєкторії і віссю труби r=СТ. Приклад конкретного виконання. Переміщують по коловій траєкторії радіуса =0,25 м однокомпонентний магнітоприймач, настроєний на сприйняття магнітного поля, створеного струмом, що протікає по комунікації (підземному трубопроводу), і орієнтований по дотичній до траєкторії. Спостерігаючи за величиною сигналу від магнітоприймача, повертають площину траєкторії (згідно з запропонованою процедурою), орієнтуючи її перпендикулярно комунікації. Визначають місця точок з мінімальними значеннями дотичної до траєкторії компоненти магнітного поля, нехай маємо: А=91° і в=(-67°). Тоді центральний кут 2С=А-В=91°-(67°)=158°. Положення (азимут) бісектриси СТ центрального кута: T=(91°+(-67°))/2=12°. Віддаль від центра траєкторії до осі труби: r= /cos с=0,25 м/cos79°=1,31 м. Таким чином, у даному прикладі вісь комунікації напрямлена перпендикулярно площині траєкторії точки спостереження, а координати комунікації (в полярній системі координат, зв'язаній з центром траєкторії точки спостереження, початок відліку азимуту вибрано від променя, що проходить вниз з центру траєкторії, напрям відліку азимута - за годинниковою стрілкою) становлять (r, T)=(1,31 м, 12°). Ортогональність площини траєкторії до комунікації, під час визначення її координат або при переміщеннях траєкторії точки спостереження, зручно контролювати за неперервністю рівності нулю перпендикулярної до траєкторії компоненти поля; при відхиленні цієї компоненти від напряму, паралельного комунікації (точніше - від площини, що проходить через вісь комунікації), з'являється сигнал, який дає можливість виправляти положення траєкторії. Практичне використання запропонованого способу передбачає переміщення траєкторії точки спостереження вздовж траси, контроль за ортогональністю площини траєкторії до комунікації, визначення азимуту і віддалі до осі комунікації, що необхідне при обстеженнях захованих підземних трубопроводів і кабелів та при ремонтних і будівельних роботах на трасі. Перевагами заявленого способу в порівнянні з аналогами і прототипом є простота процедури, обумовлена однотипним переміщенням точки спостереження по колу та визначенням максимумів і мінімумів одної компоненти - дотичної до кола, що забезпечує можливість автоматизації процесу визначення координат комунікації відносно центру цього кола. При цьому за рахунок неперервного контролю ортогональності площини траєкторії до комунікації зменшується методична похибка і підвищується достовірність результатів. Запропонований спосіб дає можливість визначати координа 7 61690 ти комунікації з транспортного засобу під час руху вздовж траси. Джерела інформації: 1. Кузык Д.Ф. Способ определения глубины залегания кабеля и выносная катушка к кабелеискателю для осуществления этого способа.- А.с. СССР 100027, Кл. G01V03/12, 1955. 2. Бахмутский В.Ф., Зуенко Г.И. Индукционные кабелеискатели. - М.: Связь, 1970.-112 с. 3. Блажкевич Б.И., Ярошевский Е.В., Ефремов В.Л. Способ определения расположения кабеля. А.с. СССР 602901, Бюл. 32, 1976. Комп’ютерна верстка Л.Литвиненко 8 4. Гордиенко В.И., Убогий В.И., Ярошевский Е.В. Электромагнитное обнаружение инженерных коммуникаций и локальных аномалий. - К.: Наук, думка, 1981.-227 с. 5. Джала P.M., Вербенець Б.Я., Андреев А.А., Пеккер Л.М. Пристрій для визначення розміщення магістральних трубопроводів // Патент України UA № 1701, Бюл. № 3,1994; Патент SU № 1804636, Бюл. № 11, 1993. Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of layout of current-conductive communication
Автори англійськоюDzhala Roman Mykhailovych
Назва патенту російськоюСпособ определения размещения токопроводящей коммуникации
Автори російськоюДжала Роман Михайлович
МПК / Мітки
МПК: G01V 3/08
Мітки: визначення, комунікації, спосіб, розміщення, струмопровідної
Код посилання
<a href="https://ua.patents.su/4-61690-sposib-viznachennya-rozmishhennya-strumoprovidno-komunikaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення розміщення струмопровідної комунікації</a>
Пристрій для точного визначення положення струмопровідної деталі та інструмента
Номер патенту: 41537
Опубліковано: 25.05.2009
Автори: Кушнір Ярослав Олегович, Корзун Сергій Сергійович, Остафьєв Володимир Олександрович
МПК: B23B 39/00
Мітки: інструмента, точного, визначення, пристрій, струмопровідної, деталі, положення
Формула / Реферат:
Пристрій для точного визначення положення струмопровідної деталі та інструмента, що містить генератор високочастотних сигналів, вихідний опір якого відповідає опору верстата, вихідні клеми котрого відповідно підключені біля шпинделя верстата та біля різального інструмента або деталі, підсилювач та детектор, який відрізняється тим, що вищевказані клеми підключені до первинної обмотки трансформатора, вторинна обмотка якого через детектор...
Пристрій для визначення розміщення та вимірювання потенціалів підземних трубопроводів
Номер патенту: 52293
Опубліковано: 25.08.2010
Автори: Джала Роман Михайлович, Вербенець Богдан Ярославович
МПК: C23F 13/00, G01V 3/00
Мітки: потенціалів, трубопроводів, визначення, пристрій, вимірювання, підземних, розміщення
Формула / Реферат:
Пристрій для визначення розміщення та вимірювання потенціалів підземних трубопроводів, що складається з розміщених у корпусі послідовно з'єднаних індуктивного датчика магнітного поля, вхідного підсилювача, фільтра, логарифмічного підсилювача, випрямляча, індикатора, блока живлення та перемикача діапазонів, з'єднаного з вхідним підсилювачем, та конструктивно суміщеного з вимикачем, з'єднаним з блоком живлення, при цьому з'єднання пристрою...
Спосіб визначення схеми розміщення різців на робочому органі землерийної машини

Номер патенту: 24694
Опубліковано: 10.07.2007
Автори: Мазуренко Петро Григорович, Юрчук Володимир Петрович, Огороднік Богдан Миколайович
МПК: E02F 9/28
Мітки: розміщення, схемі, машини, визначення, землерийної, робочому, різців, спосіб, органі
Формула / Реферат:
Спосіб визначення схеми розміщення різців на робочому органі землерийної машини, що включає дію зубців на ґрунтовий моноліт шляхом віддалення ціликів різання на величину різання одним різцем в проекції на вертикальну площину, розміщену перпендикулярно поздовжній осі робочого органа, який відрізняється тим, що процес дії різця, який складається з ціликів різання та сколювання ґрунту і утворює модуль дії різця, накладають на схему кріплення...
Спосіб визначення точності доставки і розміщення фенестрованого або гілчастого ендопротеза в аорті
Номер патенту: 58241
Опубліковано: 11.04.2011
Автори: Калашнікова Юлія Валентинівна, Колибаєв Леонід Костянтинович, Аксенко Олександр Олександрович, Володось Микола Леонтіїйович
МПК: A61M 25/095, A61F 2/26, A61M 29/00
Мітки: ендопротеза, доставки, точності, фенестрованого, визначення, гілчастого, спосіб, розміщення, аорти
Формула / Реферат:
Спосіб визначення точності доставки і розміщення фенестрованого або гілчастого ендопротеза в аорті, що включає зіставлення на екрані ангіографа контрольної рентгеноконтрастної мітки на ендопротезі з анатомічним орієнтиром, який відрізняється тим, що на агіографічному зображенні аорти наносять серединну лінію і зіставляють її з рентгеноконтрастною поздовжньою лінією ендопротеза і, при розходженні зазначених ліній між собою на рівні...
Спосіб визначення кількості автомобільних газонаповнюючих компресорних станцій (агнкс) та їх раціонального розміщення на території міста
Номер патенту: 39033
Опубліковано: 26.01.2009
Автор: Кузнецов Олександр Петрович
МПК: B60S 5/00
Мітки: компресорних, розміщення, визначення, кількості, агнкс, міста, території, раціонального, станцій, спосіб, автомобільних, газонаповнюючих
Формула / Реферат:
Спосіб визначення кількості автомобільних газонаповнюючих компресорних станцій (АГНКС) та їх раціонального розміщення на території міста, що включає визначення основних потокостворюючих та потокопоглинаючих вузлів, що підлягають обов'язковому обстеженню, який відрізняється тим, що у цих вузлах візуально в "годину пік" визначають кількість, склад і напрямок руху автомобілів, а після обробки даних обстежень за сумарними вхідними у...
Попередній патент: Робоче обладнання для руйнування конструкцій
Наступний патент: Повітряний конденсатор
Випадковий патент: Спосіб збудження електричної машини