Пристрій для точного визначення положення струмопровідної деталі та інструмента
Номер патенту: 41537
Опубліковано: 25.05.2009
Автори: Кушнір Ярослав Олегович, Остафьєв Володимир Олександрович, Корзун Сергій Сергійович
Формула / Реферат
Пристрій для точного визначення положення струмопровідної деталі та інструмента, що містить генератор високочастотних сигналів, вихідний опір якого відповідає опору верстата, вихідні клеми котрого відповідно підключені біля шпинделя верстата та біля різального інструмента або деталі, підсилювач та детектор, який відрізняється тим, що вищевказані клеми підключені до первинної обмотки трансформатора, вторинна обмотка якого через детектор підключена до позитивного входу диференціального підсилювача, негативний вхід якого через позитивний вихід другого детектора підключений до виходу вторинної обмотки другого трансформатора, первинна обмотка якого підключена до одного з кінців дроту компенсації зміни рівня наводки, при цьому негативний вихід другого детектора підключений до позитивного виходу пристрою автоналагодження нуля, причому його негативний вихід підключений до нуля схеми, а позитивний вхід через диференційний підсилювач, блок режекторних фільтрів та підсилювач підключений до першого входу блока розпізнавання сигналів, причому до другого та третього входів його підключені позитивні виходи детектора та другого детектора відповідно.
Текст
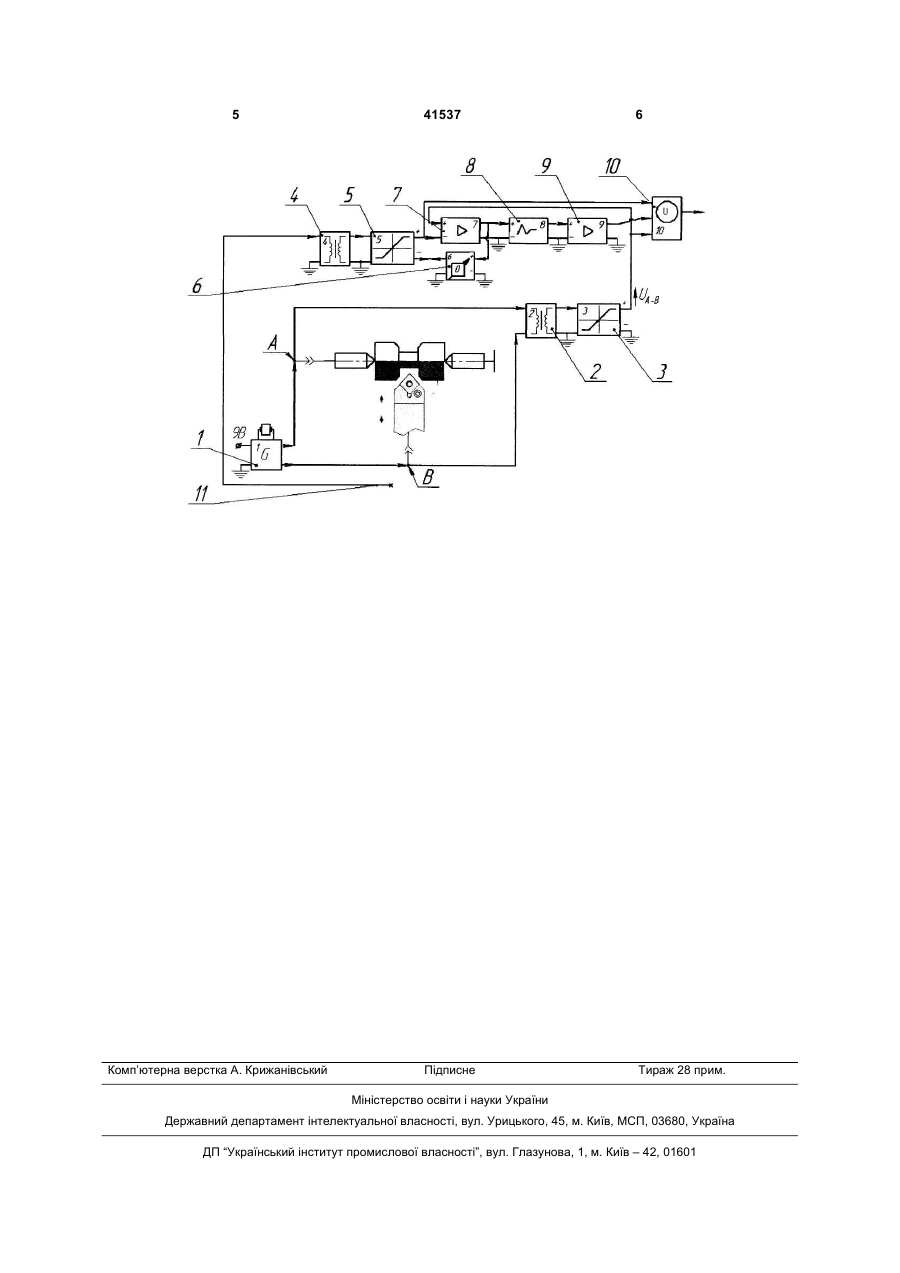
Пристрій для точного визначення положення струмопровідної деталі та інструмента, що містить генератор високочастотних сигналів, вихідний опір якого відповідає опору верстата, вихідні клеми котрого відповідно підключені біля шпинделя верстата та біля різального інструмента або деталі, підсилювач та детектор, який відрізняється тим, що вищевказані клеми підключені до первинної 3 41537 4 застосування вимірювального пристрою в автоманується, працює наступним чином. Сигнал, з клем тизованій системі технологічного обладнання. підключення генератора до верстата, надходить Поставлена задача вирішується тим, що в до трансформатора 2, що налагоджений на частопристрій для точного визначення положення струту генератора 1. Напруга з вторинної обмотки мопровідної деталі та інструмента, що містить гетрансформатору 2 надходить до детектору 3, на нератор високочастотних сигналів, вихідний опір виході якого формується постійна напруга UA-B. якого відповідає опору верстату, вихідні клеми ДЛЯ зменшення впливу наводок сигналу, від стакотрого відповідно підключені біля шпинделю вернини верстата на дроти перетворювачів, до клеми стату та біля різального інструменту або деталі, в схемі в одному екрані з дротом основного перепідсилювач та детектор, новим є те, що вищевкатворювача розташовано дріт компенсації зміни зані клеми підключені до первинної обмотки рівня наводки 11, що підключений тільки одним трансформатору, вторинна обмотка якого через кінцем до первинної обмотки другого трансформадетектор підключена до позитивного входу дифетору 4, резонансна частота якого дорівнює частоті ренціального підсилювача, негативний вхід якого генератора 1. Другий вивід другого трансформачерез позитивний вихід другого детектора підклютору підключений до загальної шини пристрою. чена до виходу вторинної обмотки другого трансСигнал з вторинної обмотки другого трансформаформатору, первинна обмотка якого підключена тору 4 надходить до другого детектору 5, на виході до одного з кінців дроту компенсації зміни рівня якого формується постійна напруга, пропорційна наводки, при цьому негативний вихід другого детенапрузі наводок на виводи перетворювача. При ктора підключений до позитивного виходу прицьому негативний вивід другого детектора підклюстрою автоналагодження нуля, причому його негачений до виходу пристрою 6 автоналагодження тивний вихід підключений до нуля схеми, а нуля. Позитивний вивід другого детектора 5 підпозитивний вхід через диференційний підсилювач, ключений до негативного входу диференційного блок режекторних фільтрів та підсилювач підклюпідсилювача 7, на позитивний вхід якого надхочений до першого входу блоку розпізнавання сигдить напруга з детектору 3. З виходу підсилювача налів, причому до другого та третього входів його 7 сигнал надходить на позитивний вхід пристрою 6 підключені позитивні виходи детектора та другого автоналагодження нуля, що є диференційним піддетектора відповідно. силювачем, негативний вхід якого підключений до Суть роботи пристрою пояснює креслення, де: "0" схеми. При цьому сигнал на вихід підсилювача на Фіг. зображена структурна схема пристрою для проходить з затримкою, достатньою для відпраточного визначення положення струмопровідної цювання сигналу торкання (100-200мс).3 виходу деталі та інструмента. підсилювача 7 крізь блок режекторних фільтрів 8 Пристрій для точного визначення положення напруга надходить на підсилювач 9. На входи блострумопровідної деталі та інструмента містить ка 10 визначення сигналів надходять сигнали з трансформатор 2, до входу первинної обмотки детектору 3, другого детектору 5 та підсилювача 9. якого підключений вихід генератора 1 та верстату, Генератор 1 може працювати в режимі джереа вторинна обмотка підключена до детектору 3. ла напруги або джерела струму. Вторинна обмотка другого трансформатору 4 підПри роботі схеми в ланцюгу наводки, що комключена до входу другого детектора 5 а його перпенсує, зміна рівня наводки має той же знак, що й винна обмотка підключена до одного з кінців дроту в ланцюгу перетворювача. При зміні опору станикомпенсації зміни рівня наводки 11, при цьому ни - напруга на виході контуру 4 змінюється в бік, другий вхід другого детектора 5 підключений до протилежний зміні в ланцюгу перетворювача. При"землі" схеми, вихід детектора 3 з'єднаний з перстрій 6 автоналагодження нуля компенсує повільні шим входом диференціального підсилювача 7, а зміни рівня сигналу від руху кабелів перетворюваперший вихід другого детектора 5 підключений до чів. На входи блоку 10 визначення сигналу надходругого входу диференційного підсилювача 7. дять сигнали з детектору 3, другого детектору 5 та Другий вихід другого детектора 5, з'єднаний з випідсилювача 9. При цьому логічний пристрій, або ходом пристрою 6 автоналагодження нуля. Сигнал процесор за зміною цих сигналів формує на інз виходу диференційного підсилювача 7 надхотерфейс системи ЧПК інформацію про стан сисдить до режекторних фільтрів 8, налагоджених на теми верстат-деталь. промислові частоти коливань а також на пристрій Реєструючи сигнал UA-B, можна отримати інавто налагодження нуля 6, з виходу режекторних формацію про зміну опору. фільтрів 8 сигнал надходить до входу підсилювача Використання корисної моделі дає можливість 9. Вихід підсилювача 9, а також вихід детектора 3 спростити процес визначення положення струмопта перший вихід другого детектора 5 підключений ровідної деталі та інструмента під час механічної до входів блоку розпізнання сигналів 10. обробки струмопровідних матеріалів, підвищити Пристрій для точного визначення положення надійність, швидкодію вимірів та продуктивність струмопровідної деталі та інструмента, що пропопроцесу обробки. 5 Комп’ютерна верстка А. Крижанівський 41537 6 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for precision determination of position of current-conducting component and tool
Автори англійськоюOstafiev Volodymyr Oleksandrovych, Kushnir Yaroslav Olehovych, Korzun Serhii Serhiiovych
Назва патенту російськоюУстройство для точного определения положения токопроводящей детали и инструмента
Автори російськоюОстафьев Владимир Александрович, Кушнир Ярослав Олегович, Корзун Сергей Сергеевич
МПК / Мітки
МПК: B23B 39/00
Мітки: інструмента, точного, визначення, положення, деталі, струмопровідної, пристрій
Код посилання
<a href="https://ua.patents.su/3-41537-pristrijj-dlya-tochnogo-viznachennya-polozhennya-strumoprovidno-detali-ta-instrumenta.html" target="_blank" rel="follow" title="База патентів України">Пристрій для точного визначення положення струмопровідної деталі та інструмента</a>
Пристрій для контролю торкання різального інструмента до деталі при токарній обробці
Номер патенту: 40137
Опубліковано: 25.03.2009
Автори: Клочко Тетяна Реджинальдівна, Скицюк Володимир Іванович
МПК: B23Q 11/00, G08B 21/00
Мітки: контролю, деталі, пристрій, інструмента, токарний, торкання, різального, обробці
Формула / Реферат:
Пристрій для контролю торкання різального інструмента до деталі при токарній обробці, що містить електромагнітний відчутник з осердям із намотаною котушкою, модуль обробки сигналу відчутника, який відрізняється тим, що вхід закріпленого на різальному інструменті електромагнітного відчутника підключений до приладу налагодження робочої частоти, вхід якого підключений до стабілізатора напруги, а вихід електромагнітного відчутника підключений до...
Пристрій для вимірювання відстані до струмопровідної поверхні
Номер патенту: 31940
Опубліковано: 25.04.2008
Автори: Єфремов Юрій Геннадійович, Шульженко Микола Григорович, Цибулько Вадим Йосипович, Чугрєєв Анатолій Іванович, Гуров Юрій Никифорович, Мєтєльов Леонід Дмитрович, Депарма Олександр Вадимович
МПК: G01B 7/14
Мітки: вимірювання, пристрій, відстані, поверхні, струмопровідної
Формула / Реферат:
Пристрій для вимірювання відстані до струмопровідної поверхні, що містить корпус-екран із розташованими в ньому двома котушками індуктивності, включеними відповідно в коло опорного і вимірювального автогенераторів, виходи яких підключені до входів перетворювача частоти, а вихід перетворювача частоти через послідовно з'єднані фільтр, частотний детектор і підсилювач підключений до входу вимірювального блока, а також суматор, джерело опорної...
Спосіб шліфування випуклих торових поверхонь зі схрещеними осями інструмента і деталі

Номер патенту: 40521
Опубліковано: 10.04.2009
Автори: Єрошенко Андрій Михайлович, Кальченко Володимир Віталійович
МПК: B24B 5/00
Мітки: деталі, осями, випуклих, поверхонь, інструмента, схрещеними, шліфування, торових, спосіб
Формула / Реферат:
Спосіб шліфування випуклих торових поверхонь, згідно з яким деталі надають обертання навколо власної осі, шліфувальному кругу з профілем у вигляді дуги кола надають подачу на врізання в радіальному напрямку, узгоджену з обертанням деталі, який відрізняється тим, що в процесі зняття припуску та формоутворення круг з радіусом профілю, більшим за радіус профілю заготовки, переміщується вздовж прямої, яка перпендикулярна осям заготовки та деталі...
Пристрій для виміру опорів високоомних об’єктів
Номер патенту: 67820
Опубліковано: 15.07.2004
Автори: Суглоба Маргарита Олександрівна, Супрун Наталія Петрівна, Скрипник Юрій Олексійович
МПК: G01R 27/00, G01R 27/02, G01R 17/00
Мітки: об'єктів, пристрій, виміру, опорів, високоомних
Формула / Реферат:
Пристрій для виміру опорів високоомних об'єктів, що містить генератор випробної напруги, автоматичний перемикач, входи якого з’єднані з потенційним і заземленими виходами генератора випробної напруги, дві вхідні клеми для підключення досліджуваного об'єкта, одна з яких з'єднана з виходом автоматичного перемикача, друга клема з'єднана з високоомним входом підсилювача, до виходу якого підключені послідовно з'єднані амплітудний детектор і фільтр...
Пристрій рахування чотиривісних відчепів залізничних рухомих складів
Номер патенту: 29181
Опубліковано: 10.01.2008
Автор: Снітовський Володимир Михайлович
МПК: B61L 1/00
Мітки: пристрій, відчепів, залізничних, чотиривісних, складів, рухомих, рахування
Формула / Реферат:
Пристрій рахування чотиривісних відчепів залізничних рухомих складів, що включає датчик, установлений на залізничній колії, і лічильник осей відчепів, який відрізняється тим, що вихід датчика підключений до входу перешкодозахищеного операційного підсилювача, а його вихід підключений до вузла гальванічної розв'язки, до виходу якого підключений перший вхід лічильника осей відчеплення, а вихід останнього підключений до свого другого входу,...
Попередній патент: Спосіб профілактики карієсу тимчасових зубів у дітей молодшого віку
Наступний патент: Спосіб травлення сталі
Випадковий патент: Спосіб нанесення покриття сплавом паладій-нікель на неблагородні метали та їх сплави