Правильна машина
Номер патенту: 6183
Опубліковано: 15.04.2005
Автори: Кочин Леонід Павлович, Гриценко Сергій Анатолійович, Єлецьких Володимир Іванович


Формула / Реферат
Правильна машина, що включає станину з верхньою і нижньою касетами і розташованими в них верхніми і нижніми робочими роликами, чотири натискних гвинти, кожний з яких з'єднаний з механізмом його обертання, механізм контролю положення верхньої касети щодо нижньої, яка відрізняється тим, що механізм контролю положення верхньої касети щодо нижньої виконаний у вигляді чотирьох безконтактних датчиків, корпуси яких установлені на нижній касеті в одній горизонтальній площині в чотирьох діагонально протилежних кутах, а магніти безконтактних датчиків розміщені у верхній касеті в одній горизонтальній площині відповідно до розташування датчиків на нижній касеті.
Текст
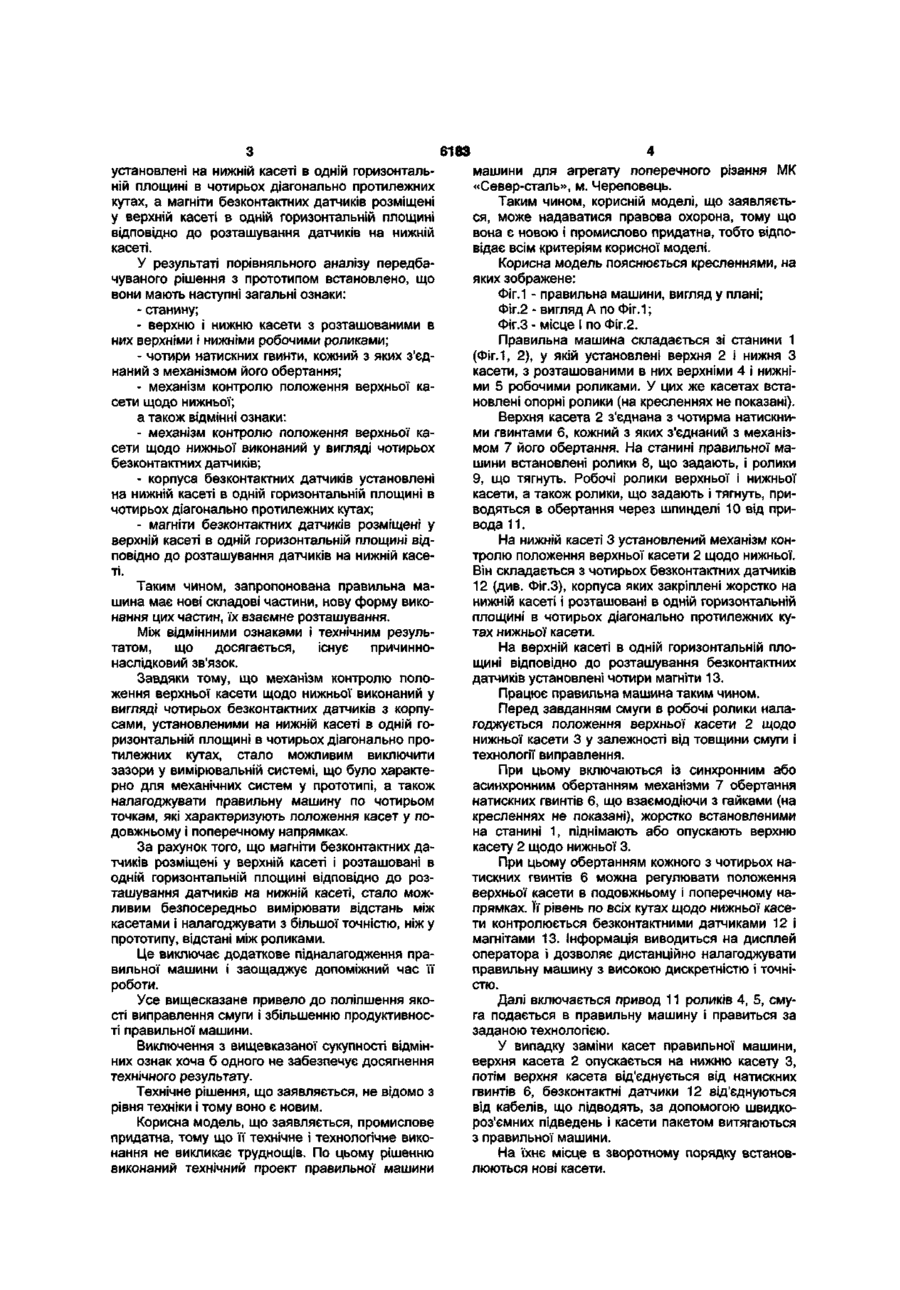
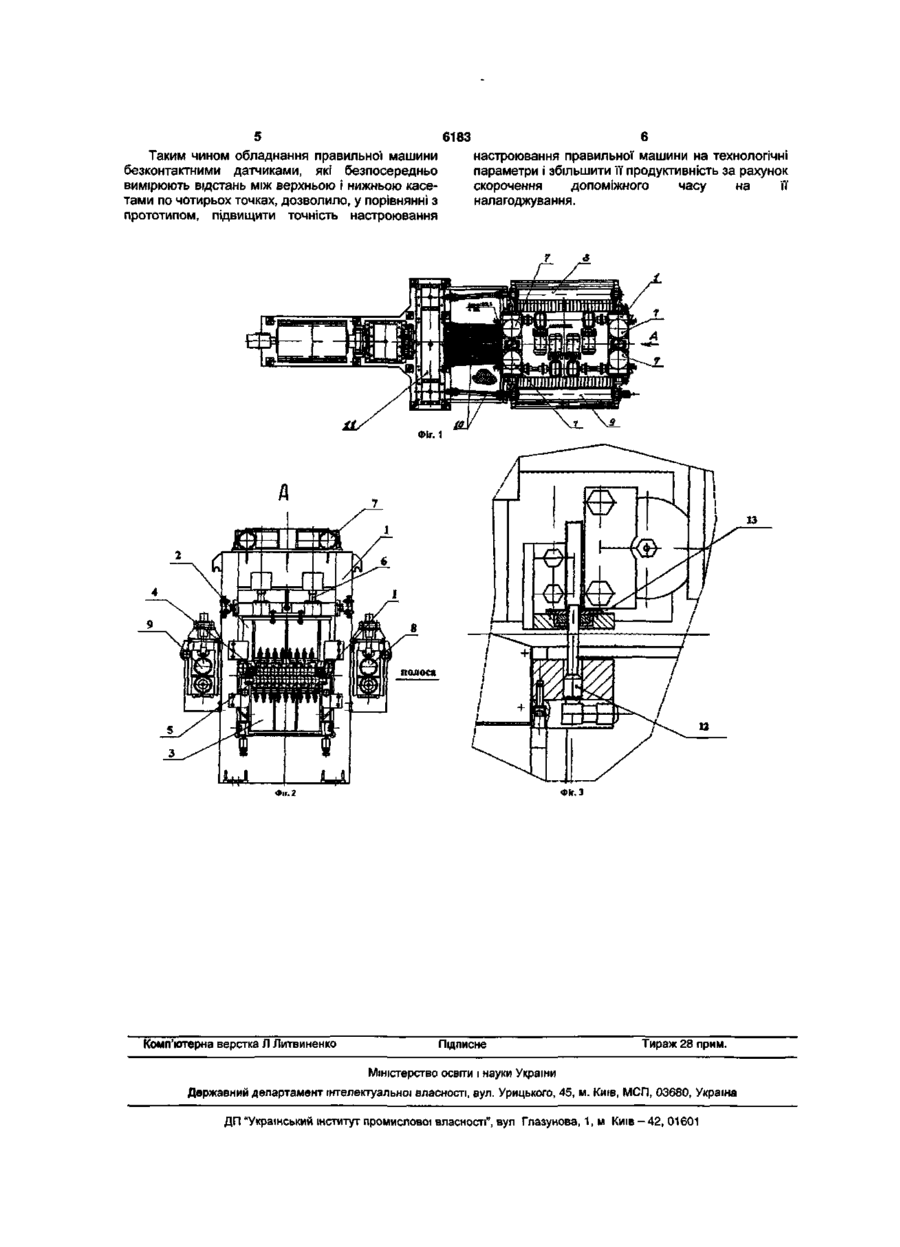
Правильна машина, що включає станину з верхньою і нижньою касетами і розташованими в них верхніми і нижніми робочими роликами, чоти ри натискних гвинти, кожний з яких з'єднаний з механізмом його обертання, механізм контролю положення верхньої касети щодо нижньої, яка відрізняється тим, що механізм контролю положення верхньої касети щодо нижньої виконаний у вигляді чотирьох безконтактних датчиків, корпуси яких установлені на нижній касеті в одній горизонтальній площині в чотирьох діагонально протилежних кутах, а магніти безконтактних датчиків розміщені у верхній касеті в одній горизонтальній площині відповідно до розташування датчиків на нижній касеті. Корисна модель відноситься до галузі металургійного машинобудування, а саме, до машин для виправлення тонкої холодної смуги в ад'юстажних цехах металургійних заводів. В якості прототипа обрана 17-ти роликова правильна машина [а.с. СРСР №298404, А.А. Королев Механическое оборудование прокатных цехов черной и цветной металлургии. М м «Металлургия», 1976г. стр.313], що містить станину, верхню і нижню касети, робочі ролики, розташовані у верхній і нижній касетах, чотири натискних гвинти, які зв'язані з верхньою касетою, приводи обертання натискних гвинтів, кожний з яких зв'язаний з одним гвинтом і працює незалежно від інших приводів, механізм контролю положення верхньої касети щодо станини. Механізм контролю положення касети щодо станини має чотири цифрових механічних індикатори, які розміщені на стійках станини, і пристрою для передачі переміщень верхньої касети до індикаторів, закріплені в чотирьох точках верхньої касети і зв'язані кінематично з індикаторами. У цій правильній машині, завдяки індивідуальному приводові кожного натискного гвинта, положення верхньої касети щодо нижньої може регулюватися по двох напрямках - подовжньому і поперечному. При цьому точність настроювання визначається точністю механізмів, що вимірюють положення верхньої касети. Недоліком зазначеної правильної машини є: - механічна система виміру положення верх ньої касети, яка має зазори в ланках ланцюга виміру; - непрямий вимір положення верхньої касети щодо нижньої касети, тому що її положення виміряється щодо станини, у якій установлена нижня касета. Ці недоліки знижують точність настроювання правильної машини, знижують якість виправлення смуги. У процесі неякісного виправлення смуги виникає необхідність у проміжному настроюванні машини, що знижує її продуктивність. В основу моделі поставлена задача поліпшення якості виправлення смуги і збільшення продуктивності правильної машини. Ця задача вирішена за рахунок технічного результату, що складається в підвищенні точності настроювання правильної машини, тобто точного визначення положення верхньої касети щодо нижньої по двох напрямках - подовжнього і поперечного щодо руху смуги. Для досягнення вищевказаного результату в правильній машині, що включає станину з верхньою і нижньою касетами і розташованими в них верхніми і нижніми робочими роликами, чотири натискних гвинти, кожний з яких з'єднаний з механізмом його обертання, механізм контролю положення верхньої касети щодо нижньої, відповідно до корисної моделі, механізм контролю положення верхньої касети щодо нижньої виконаний у вигляді чотирьох безконтактних датчиків, корпуса яких СО 00 со 6183 установлені на нижній касеті в одній горизонтальній площині в чотирьох діагонально протилежних кутах, а магніти безконтактних датчиків розміщені у верхній касеті в одній горизонтальній площині відповідно до розташування датчиків на нижній касеті. У результаті порівняльного аналізу передбачуваного рішення з прототипом встановлено, що вони мають наступні загальні ознаки: - станину; - верхню і нижню касети з розташованими в них верхніми і нижніми робочими роликами; - чотири натискних гвинти, кожний з яких з'єднаний з механізмом його обертання; - механізм контролю положення верхньої касети щодо нижньої; а також відмінні ознаки: - механізм контролю положення верхньої касети щодо нижньої виконаний у вигляді чотирьох безконтактних датчиків; - корпуса безконтактних датчиків установлені на нижній касеті в одній горизонтальній площині в чотирьох діагонально протилежних кутах; - магніти безконтактних датчиків розміщені у верхній касеті в одній горизонтальній площині відповідно до розташування датчиків на нижній касеті. Таким чином, запропонована правильна машина має нові складові частини, нову форму виконання цих частин, їх взаємне розташування. Між відмінними ознаками і технічним результатом, що досягається, існує причиннонаслідковий зв'язок. Завдяки тому, що механізм контролю положення верхньої касети щодо нижньої виконаний у вигляді чотирьох безконтактних датчиків з корпусами, установленими на нижній касеті в одній горизонтальній площині в чотирьох діагонально протилежних кутах, стало можливим виключити зазори у вимірювальній системі, що було характерно для механічних систем у прототипі, а також налагоджувати правильну машину по чотирьом точкам, які характеризують положення касет у подовжньому і поперечному напрямках. За рахунок того, що магніти безконтактних датчиків розміщені у верхній касеті і розташовані в одній горизонтальній площині відповідно до розташування датчиків на нижній касеті, стало можливим безпосередньо вимірювати відстань між касетами і налагоджувати з більшої точністю, ніж у прототипу, відстані між роликами. Це виключає додаткове підналагодження правильної машини і заощаджує допоміжний час її роботи. Усе вищесказане привело до поліпшення якості виправлення смуги і збільшенню продуктивності правильної машини. Виключення з вищевказаної сукупності відмінних ознак хоча б одного не забезпечує досягнення технічного результату. Технічне рішення, що заявляється, не відомо з рівня техніки і тому воно є новим. Корисна модель, що заявляється, промислове придатна, тому що її технічне і технологічне виконання не викликає труднощів. По цьому рішенню виконаний технічний проект правильної машини машини для агрегату поперечного різання МК «Север-сталь», м. Череповець. Таким чином, корисній моделі, що заявляється, може надаватися правова охорона, тому що вона є новою і промислово придатна, тобто відповідає всім критеріям корисної моделі. Корисна модель пояснюється кресленнями, на яких зображене: Фіг.1 - правильна машини, вигляд у плані; Фіг.2 - вигляд А по Фіг.1; Фіг.З - місце І по Фіг.2. Правильна машина складається зі станини 1 (Фіг.1, 2), у якій установлені верхня 2 і нижня З касети, з розташованими в них верхніми 4 і нижніми 5 робочими роликами. У цих же касетах встановлені опорні ролики (на кресленнях не показані). Верхня касета 2 з'єднана з чотирма натискними гвинтами 6, кожний з яких з'єднаний з механізмом 7 його обертання. На станині правильної машини встановлені ролики 8, що задають, і ролики 9, що тягнуть. Робочі ролики верхньої і нижньої касети, а також ролики, що задають і тягнуть, приводяться в обертання через шпинделі 10 від привода 11. На нижній касеті 3 установлений механізм контролю положення верхньої касети 2 щодо нижньої. Він складається з чотирьох безконтактних датчиків 12 (див. Фіг.З), корпуса яких закріплені жорстко на нижній касеті і розташовані в одній горизонтальній площині в чотирьох діагонально протилежних кутах нижньої касети. На верхній касеті в одній горизонтальній площині відповідно до розташування безконтактних датчиків установлені чотири магніти 13. Працює правильна машина таким чином. Перед завданням смуги в робочі ролики налагоджується положення верхньої касети 2 щодо нижньої касети 3 у залежності від товщини смуги і технології виправлення. При цьому включаються із синхронним або асинхронним обертанням механізми 7 обертання натискних гвинтів 6, що взаємодіючи з гайками (на кресленнях не показані), жорстко встановленими на станині 1, піднімають або опускають верхню касету 2 щодо нижньої 3. При цьому обертанням кожного з чотирьох натискних гвинтів 6 можна регулювати положення верхньої касети в подовжньому і поперечному напрямках, її рівень по всіх кутах щодо нижньої касети контролюється безконтактними датчиками 12 і магнітами 13. Інформація виводиться на дисплей оператора і дозволяє дистанційно налагоджувати правильну машину з високою дискретністю і точністю. Далі включається привод 11 роликів 4, 5, смуга подається в правильну машину і правиться за заданою технологією. У випадку заміни касет правильної машини, верхня касета 2 опускається на нижню касету З, потім верхня касета від'єднується від натискних гвинтів 6, безконтактні датчики 12 від'єднуються від кабелів, що підводять, за допомогою швидкороз'ємних підведень і касети пакетом витягаються з правильної машини. На їхнє місце в зворотному порядку встановлюються нові касети. 6183 Таким чином обладнання правильної машини безконтактними датчиками, які безпосередньо вимірюють відстань між верхньою і нижньою касетами по чотирьох точках, дозволило, у порівнянні з прототипом, підвищити точність настроювання настроювання правильної машини на технологічні параметри ізбільшити її продуктивність за рахунок скорочення допоміжного часу на її налагоджування. Фіг. З Комп'ютерна верстка Л Литвиненко Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул Глазунова, 1, м К и ї в - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюStraightening machine
Автори англійськоюYeletskykh Volodymyr Ivanovych, Hrytsenko Serhii Anatoliovych, Kochyn Leonid Pavlovych
Назва патенту російськоюПравильная машина
Автори російськоюЕлецких Владимир Иванович, Гриценко Сергей Анатольевич, Кочин Леонид Павлович
МПК / Мітки
МПК: B21D 1/00
Код посилання
<a href="https://ua.patents.su/4-6183-pravilna-mashina.html" target="_blank" rel="follow" title="База патентів України">Правильна машина</a>
Правильна машина

Номер патенту: 72800
Опубліковано: 15.04.2005
Автори: Алексієнко Георгій Якович, стапенко Георгій Леонідович, Федосов Володимир Гарольдович, Хацкелян Ігор Павлович, Алексєєнко Богдан Георгійович
МПК: B21D 3/00
Формула / Реферат:
1. Правильна машина, що містить розподільний корпус обертання навколо осьової лінії подачі правлячого прокату з приводом обертання, правильні кільця, встановлені на підшипниках у касетах і нахилені до осьової лінії розподільного корпусу обертання, пристрій поперечного зміщення касет відносно осьової лінії розподільного корпусу обертання, яка відрізняється тим, що пристрій поперечного зміщення касет являє собою замкнутий гідравлічний контур,...
Косовалкова правильна машина

Номер патенту: 18346
Опубліковано: 25.12.1997
Автори: Кліменко Леонід Андрійович, Москальов Владіслав Андрєєвіч, Коровіцкій Євгеній Леонович, Палкін Юрій Олександрович, Мартиненко Сергій Іванович, Старушкін Микола Іванович, Льоткін Олександр Михайлович, Маскілєйсон Анатолій Моісєєвіч, Завгородній Володимир Григорьєвич
МПК: B21D 3/00
Мітки: правильна, косовалкова, машина
Формула / Реферат:
1. Косовалковая правильная машина, содержащая три двухвалковых обоймы, каждая из которых выполнена из опорного и нажимного вогнутых волков, причем длина валков средней обоймы превышает длину валков крайних обойм, отличающаяся тем, что в средней обойме опорный валок выполнен с занижением профиля от теоретического гиперболоидного, плавно уменьшающимся от максимальной величины в середине бочки валка до нуля к его торцам, нажимной валок выполнен...
Косовалкова правильна машина

Номер патенту: 18317
Опубліковано: 25.12.1997
Автори: Коровіцький Євген Лєонович, Кліменко Леонід Андрійович, Льоткін Олександр Михайлович, Завгородній Володимир Григорович, Москальов Владіслав Андрєєвіч, Палкін Юрій Олександрович, Старушкін Микола Іванович, Кісіль Володимир Костянтинович, Маскілейсон Анатолій Моісєєвіч, Сібірськая Ірина Дмитріївна, Толпін Аркадій Ісааковіч, Сокуренко Віктор Павлович, Мартиненко Сергій Іванович, Трубіцин Борис Вікторович, Івченков Сергій Іванович, Гребе Олександр Костянтинович
МПК: B21D 3/00
Мітки: машина, правильна, косовалкова
Формула / Реферат:
Косовалковая правильная машина, содержащая установленные последовательно по ходу правки клети, в каждой из которых расположены два вогнутых валка с различной вогнутостью поверхности, отличающаяся тем, что разность вогнутостей валков каждой последующей клети больше соответствующей разности валков предыдущей клети на 4 - 8%, при этом величина вогнутости каждого валка определяется как разность радиусов торца и горловины его бочки.
Правильна машина, переважно для виправлення листів та штаб

Номер патенту: 27803
Опубліковано: 16.10.2000
Автор: Бенц Віллі
МПК: B21D 1/00
Мітки: правильна, машина, виправлення, листів, переважно, штаб
Текст:
...поперечной траверсой и верхним вальцовым станком, и на выполненных на верхнем вальцовом станке перемычках, выступающих в сторону нижнего вальцового станка. При этом предпочтительно, чтобы в зоне компенсирующих цилиндров было установлено несколько плоских поворачивающихся направляющих для установки верхней поперечной траверсы под углом к верхнему вальцовому станку. С помощью точек разворота, получающихся на участках поворачивающихся...
Основов’язальна машина

Номер патенту: 49519
Опубліковано: 16.09.2002
Автори: Піпа Борис Федорович, Хомяк Олег Миколайович, Ловейкіна Світлана Олексіївна
МПК: D04B 23/00
Мітки: основов'язальна, машина
Формула / Реферат:
1. Основов'язальна машина, що містить електродвигун, головний вал, кінематично з'єднаний з електродвигуном, механізм в'язання, розташований на головному валу, механізм товароприймання, кінематично з'єднаний з головним валом, механізм подачі верхньої основи, кінематично з'єднаний з головним валом, механізм подачі нижньої основи, верхній та нижній навої, кінематично з'єднані відповідно з механізмом подачі верхньої та нижньої основи, яка...
Попередній патент: Турбодетандер
Наступний патент: Верстат для заточування свердел
Випадковий патент: Спосіб керування барабанною промивочною машиною