Електромеханічні ваги
Номер патенту: 68192
Опубліковано: 26.03.2012

Формула / Реферат
Електромеханічні ваги, що містять встановлену на пружному підвісі вантажоприймальну платформу, силопередавальний елемент, виконаний у вигляді двох, розташованих співвісно у вертикальній площині, постійних магнітів з повітряним зазором між ними, силовимірювальний датчик та електрично з'єднаний з ним мікропроцесорний блок вимірювання та індикації маси, які відрізняються тим, що верхній магніт силопередавального елемента закріплений з можливістю переміщення по вертикальній осі безпосередньо у центрі жорсткості платформи, а нижній магніт з'єднаний з силовим входом силовимірювального датчика з можливістю переміщення в горизонтальній площині, причому величина повітряного зазору між магнітами у вихідному стані встановлена в залежності від сили їх відштовхування у заданому діапазоні вимірювання маси вантажу.
Текст
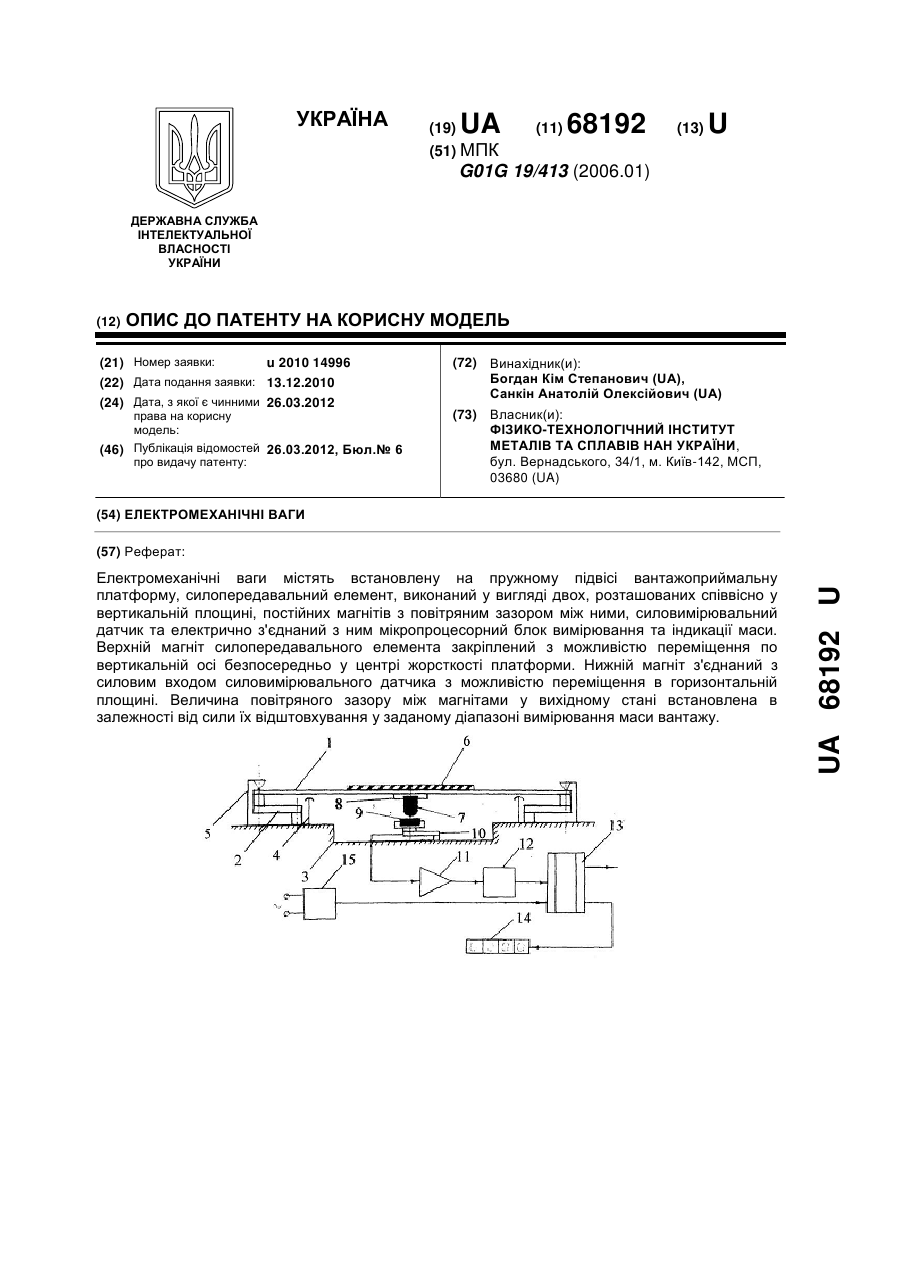
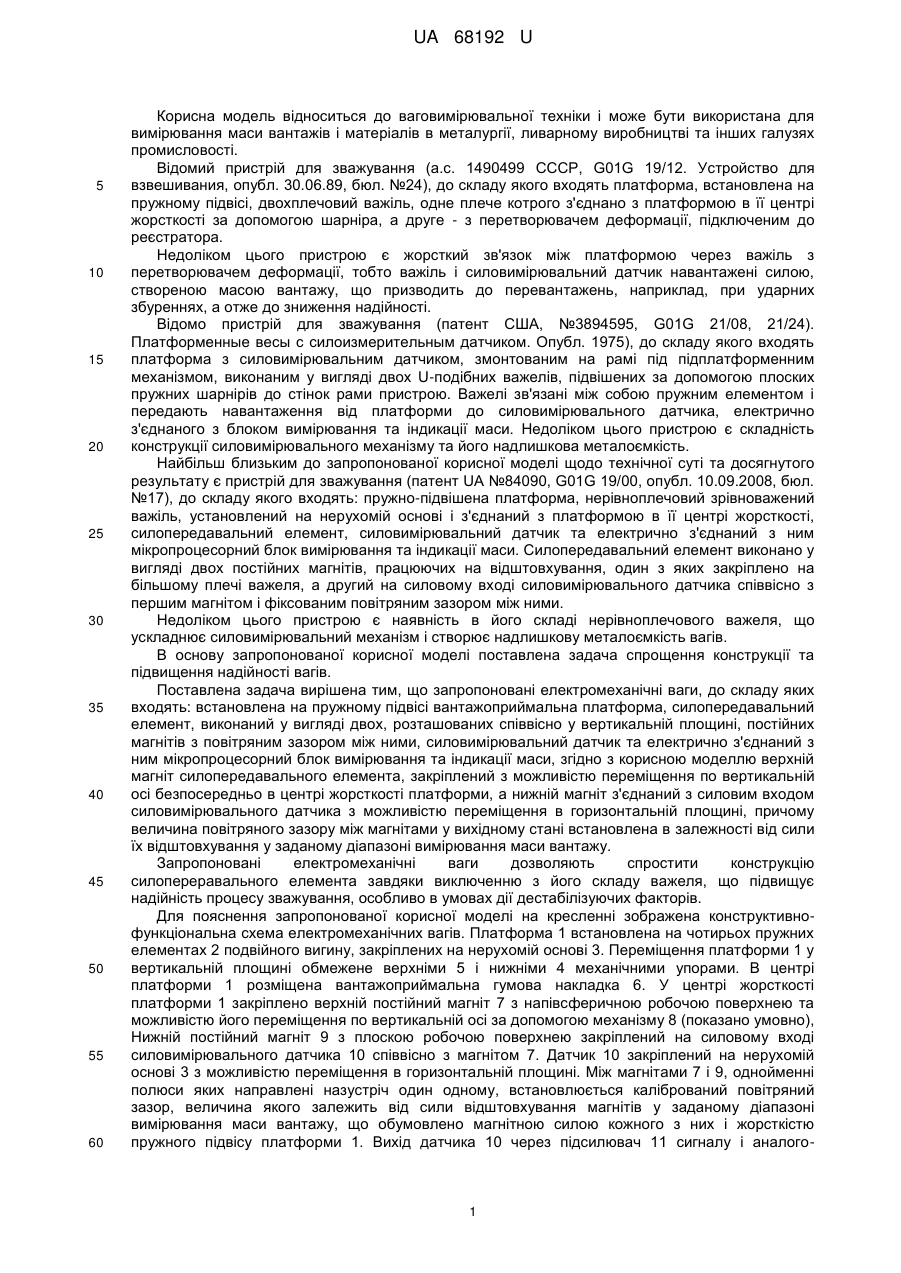
Реферат: UA 68192 U UA 68192 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель відноситься до ваговимірювальної техніки і може бути використана для вимірювання маси вантажів і матеріалів в металургії, ливарному виробництві та інших галузях промисловості. Відомий пристрій для зважування (а.с. 1490499 СССР, G01G 19/12. Устройство для взвешивания, опубл. 30.06.89, бюл. №24), до складу якого входять платформа, встановлена на пружному підвісі, двохплечовий важіль, одне плече котрого з'єднано з платформою в її центрі жорсткості за допомогою шарніра, а друге - з перетворювачем деформації, підключеним до реєстратора. Недоліком цього пристрою є жорсткий зв'язок між платформою через важіль з перетворювачем деформації, тобто важіль і силовимірювальний датчик навантажені силою, створеною масою вантажу, що призводить до перевантажень, наприклад, при ударних збуреннях, а отже до зниження надійності. Відомо пристрій для зважування (патент США, №3894595, G01G 21/08, 21/24). Платформенные весы с силоизмерительным датчиком. Опубл. 1975), до складу якого входять платформа з силовимірювальним датчиком, змонтованим на рамі під підплатформенним механізмом, виконаним у вигляді двох U-подібних важелів, підвішених за допомогою плоских пружних шарнірів до стінок рами пристрою. Важелі зв'язані між собою пружним елементом і передають навантаження від платформи до силовимірювального датчика, електрично з'єднаного з блоком вимірювання та індикації маси. Недоліком цього пристрою є складність конструкції силовимірювального механізму та його надлишкова металоємкість. Найбільш близьким до запропонованої корисної моделі щодо технічної суті та досягнутого результату є пристрій для зважування (патент UA №84090, G01G 19/00, опубл. 10.09.2008, бюл. №17), до складу якого входять: пружно-підвішена платформа, нерівноплечовий зрівноважений важіль, установлений на нерухомій основі і з'єднаний з платформою в її центрі жорсткості, силопередавальний елемент, силовимірювальний датчик та електрично з'єднаний з ним мікропроцесорний блок вимірювання та індикації маси. Силопередавальний елемент виконано у вигляді двох постійних магнітів, працюючих на відштовхування, один з яких закріплено на більшому плечі важеля, а другий на силовому вході силовимірювального датчика співвісно з першим магнітом і фіксованим повітряним зазором між ними. Недоліком цього пристрою є наявність в його складі нерівноплечового важеля, що ускладнює силовимірювальний механізм і створює надлишкову металоємкість вагів. В основу запропонованої корисної моделі поставлена задача спрощення конструкції та підвищення надійності вагів. Поставлена задача вирішена тим, що запропоновані електромеханічні ваги, до складу яких входять: встановлена на пружному підвісі вантажоприймальна платформа, силопередавальний елемент, виконаний у вигляді двох, розташованих співвісно у вертикальній площині, постійних магнітів з повітряним зазором між ними, силовимірювальний датчик та електрично з'єднаний з ним мікропроцесорний блок вимірювання та індикації маси, згідно з корисною моделлю верхній магніт силопередавального елемента, закріплений з можливістю переміщення по вертикальній осі безпосередньо в центрі жорсткості платформи, а нижній магніт з'єднаний з силовим входом силовимірювального датчика з можливістю переміщення в горизонтальній площині, причому величина повітряного зазору між магнітами у вихідному стані встановлена в залежності від сили їх відштовхування у заданому діапазоні вимірювання маси вантажу. Запропоновані електромеханічні ваги дозволяють спростити конструкцію силопереравального елемента завдяки виключенню з його складу важеля, що підвищує надійність процесу зважування, особливо в умовах дії дестабілізуючих факторів. Для пояснення запропонованої корисної моделі на кресленні зображена конструктивнофункціональна схема електромеханічних вагів. Платформа 1 встановлена на чотирьох пружних елементах 2 подвійного вигину, закріплених на нерухомій основі 3. Переміщення платформи 1 у вертикальній площині обмежене верхніми 5 і нижніми 4 механічними упорами. В центрі платформи 1 розміщена вантажоприймальна гумова накладка 6. У центрі жорсткості платформи 1 закріплено верхній постійний магніт 7 з напівсферичною робочою поверхнею та можливістю його переміщення по вертикальній осі за допомогою механізму 8 (показано умовно), Нижній постійний магніт 9 з плоскою робочою поверхнею закріплений на силовому вході силовимірювального датчика 10 співвісно з магнітом 7. Датчик 10 закріплений на нерухомій основі 3 з можливістю переміщення в горизонтальній площині. Між магнітами 7 і 9, однойменні полюси яких направлені назустріч один одному, встановлюється калібрований повітряний зазор, величина якого залежить від сили відштовхування магнітів у заданому діапазоні вимірювання маси вантажу, що обумовлено магнітною силою кожного з них і жорсткістю пружного підвісу платформи 1. Вихід датчика 10 через підсилювач 11 сигналу і аналого 1 UA 68192 U 5 10 15 20 25 цифровий перетворювач 12 підключений до мікропроцесорного блока 13 вимірювання та індикації маси на цифровому індикаторі 14. Живлення елементів ваговимірювальної схеми здійснюється від блока 15 живлення, підключеного до мережі змінного струму напругою 220 В. Електромеханічні ваги працюють наступним чином. У вихідному стані платформа 1 не навантажена, вихідний сигнал датчика 10 дорівнює нулю І на індикаторі 14 також висвітлені нулі в усіх розрядах. Після надходження вантажу, який необхідно зважити, на платформу 1 пружні елементи 2 стискаються на відповідну величину. Одночасно пропорційно деформації пружних елементів 2 зменшується повітряний зазор hm між магнітами 7 і 9, що приводить до появи сили Fm=f(hm) на силовому вході силовимірювального датчика 10. Оскільки h m=f(m), сила Fm теж пропорційна m. Вихідний сигнал Um датчика 10 надходить у блок 13 і на індикаторі 14 висвітлюється маса m вантажу. Після знімання вантажу з платформи 1 силовимірювальний механізм вагів повертається у вихідний стан і на індикаторі 14 висвітлюються нулі. Для захисту датчика 10 від статичних і динамічних дестабілізуючих збурень в процесі зважування зазор hm між упорами 4 і платформою 1 менший на 10-20 % ніж фіксований початковий зазор між магнітами 7 і 9. Результати дослідження експериментального зразка запропонованого пристрою у вигляді електромеханічних платформенних вагів з найбільшою межею зважування 1,0 кг показали, що похибка від нелінійності залежності Fm=f(hm) в діапазоні hm=1,0 мм не перевищує 0,5 %. Після лінеаризації цієї залежності програмним шляхом в блоці 13 відносна похибка зважування не перевищувала 0,1 % від найбільшої межі зважування. Це створює певні умови для отримання економічного ефекту від впровадження запропонованих електромеханічних вагів у виробництво та в процесі експлуатації. Таким чином, запропоновані електромеханічні ваги, на відміну від найближчого аналога та інших аналогів, дають змогу одержати новий технічний ефект, виражений у спрощенні конструкції та підвищенні надійності процесу зважування за рахунок прямої (безважельної) передачі сили, пропорційної масі вантажу, що зважується, на силовимірювальний датчик. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 Електромеханічні ваги, що містять встановлену на пружному підвісі вантажоприймальну платформу, силопередавальний елемент, виконаний у вигляді двох, розташованих співвісно у вертикальній площині, постійних магнітів з повітряним зазором між ними, силовимірювальний датчик та електрично з'єднаний з ним мікропроцесорний блок вимірювання та індикації маси, які відрізняються тим, що верхній магніт силопередавального елемента закріплений з можливістю переміщення по вертикальній осі безпосередньо у центрі жорсткості платформи, а нижній магніт з'єднаний з силовим входом силовимірювального датчика з можливістю переміщення в горизонтальній площині, причому величина повітряного зазору між магнітами у вихідному стані встановлена в залежності від сили їх відштовхування у заданому діапазоні вимірювання маси вантажу. Комп’ютерна верстка А. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюElectromechanical balance
Автори англійськоюBohdan Kim Stepanovych, Sankin Anatolii Oleksiiovych
Назва патенту російськоюЭлектромеханические весы
Автори російськоюБогдан Ким Степанович, Санкин Анатолий Алексеевич
МПК / Мітки
МПК: G01G 19/413
Мітки: ваги, електромеханічні
Код посилання
<a href="https://ua.patents.su/4-68192-elektromekhanichni-vagi.html" target="_blank" rel="follow" title="База патентів України">Електромеханічні ваги</a>
Дводіапазонні електромеханічні ваги
Номер патенту: 35005
Опубліковано: 26.08.2008
Автори: Богдан Кім Степанович, Санкін Анатолій Олексійович
МПК: G01G 19/00
Мітки: ваги, дводіапазонні, електромеханічні
Формула / Реферат:
Дводіапазонні електромеханічні ваги, що містять вантажоприймальну платформу на пружному підвісі, нерівноплечий вимірювальний важіль, установлений на нерухомій основі, одне плече якого через передавальний пружний елемент з'єднане з силовим входом силовимірювального датчика, а друге через електромагнітний фіксатор - з центром жорсткості платформи, мікропроцесорний блок вимірювання маси, цифровий індикатор, блок живлення, які відрізняються тим,...
Пружинно-тензометричні ваги
Номер патенту: 36148
Опубліковано: 10.10.2008
Автори: Санкін Анатолій Олексійович, Богдан Кім Степанович
МПК: G01G 19/00
Мітки: пружинно-тензометричні, ваги
Формула / Реферат:
Пружинно-тензометричні ваги, до складу яких входять вантажоприймальна пружно підвішена платформа, силопередавальний елемент, з'єднаний з платформою в її центрі жорсткості, силовимірювальний датчик, вихід котрого через підсилювач підключений до мікропроцесорного блока вимірювання та індикації маси, і блок живлення, які відрізняються тим, що силопередавальний елемент виконаний у вигляді двох співвісно розташованих постійних кільцевих магнітів і...
Конвеєрні ваги
Номер патенту: 9530
Опубліковано: 17.10.2005
Автор: Тимофєєва Юлія Володимирівна
МПК: G01G 11/00
Формула / Реферат:
1. Конвеєрні ваги, що містять нерухому опору, встановлену на рамі конвеєра, профіль зважування, прикріплений до нерухомої опори плоскими пружинами, і датчик силовимірювальний тензорезисторний, закріплений одним кінцем на нерухомій опорі, які відрізняються тим, що профіль зважування підвішений на другому кінці датчика за допомогою пружного кардана, що складається з двох пружних пластин, які з'єднані між собою взаємно перпендикулярно.2....
Низькопрофільні ваги для зважування залізничного транспорту
Номер патенту: 63031
Опубліковано: 15.01.2004
Автори: Капітельман Леонід Вільямович, Нікітінський Михайло Павлович, Докаленко Сергій Анатолійович
МПК: B60S 5/00, G01G 19/00
Мітки: ваги, транспорту, зважування, залізничного, низькопрофільні
Формула / Реферат:
1. Низькопрофільні ваги для зважування залізничного транспорту, які містять вантажоприймальну платформу, пристрій силовведення, встановлені на фундаменті силовимірювальні модулі з тензодатчиками, які відрізняються тим, що силовимірювальні модулі з тензодатчиками розташовані перед стиками рейок під'їзного шляху з рейками вантажоприймальної платформи та вписані по висоті у кінцеві опорні частини подовжніх балок вантажоприймальної платформи,...
Низькопрофільні гідроелектронні ваги
Номер патенту: 38630
Опубліковано: 12.01.2009
Автори: Богдан Кім Степанович, Терновой Сергій Анатолійович, Санкін Анатолій Олексійович
МПК: G01G 19/00, G01G 5/00
Мітки: гідроелектронні, ваги, низькопрофільні
Формула / Реферат:
Низькопрофільні гідроелектронні ваги, до складу яких входять: жорстка основа; вантажоприймальна пружно підвішена платформа; гідроопори; суматор тиску; гідравлічний дросель; гідроелектронний перетворювач тиску в електричний сигнал, пропорційний масі вантажу на платформі; підсилювач; аналого-цифровий перетворювач; мікропроцесорний блок вимірювання та індикації маси; блок живлення, які відрізняються тим, що гідроопори жорстко закріплені на...
Попередній патент: Комбікорм для відгодівлі молодняку качок
Наступний патент: Спосіб визначення положення центру ваги тіла
Випадковий патент: Спосіб оцінки ефективності лікування екземи