Спосіб визначення положення центру ваги тіла
Номер патенту: 68193
Опубліковано: 26.03.2012
Автори: Аніскевич Леонід Володимирович, Погорілець Олександр Миколайович
Формула / Реферат
Спосіб визначення положення центру ваги тіла, яке має складові частини, сили тяжіння і координати центрів їх тяжіння, який відрізняється тим, що вектори сил, об'ємів чи площ складових частин тіла у певному масштабі відкладають у двох протилежних вертикальних напрямках: більші сили - у центрі тяжіння складової частини дії менших сил, а менші сили - у центрі тяжіння дії більших сил; кінець вектора сили одної частини, що спрямований вгору і кінець вектора сили другої частини, що спрямований вниз, сполучають лінією; аналогічно сполучають лінією кінці векторів, що спрямовані відповідно вниз і вгору; точка перетину цих ліній і буде центром тяжіння з двома координатами всього тіла, а при наявності в тілі від'ємних мас (площ чи об'ємів) однією лінією сполучають кінці векторів сил спрямованих вгору, а другою лінією - спрямованих вниз і при цьому точка перетину цих ліній буде центром тяжіння з двома координатами всього тіла.
Текст
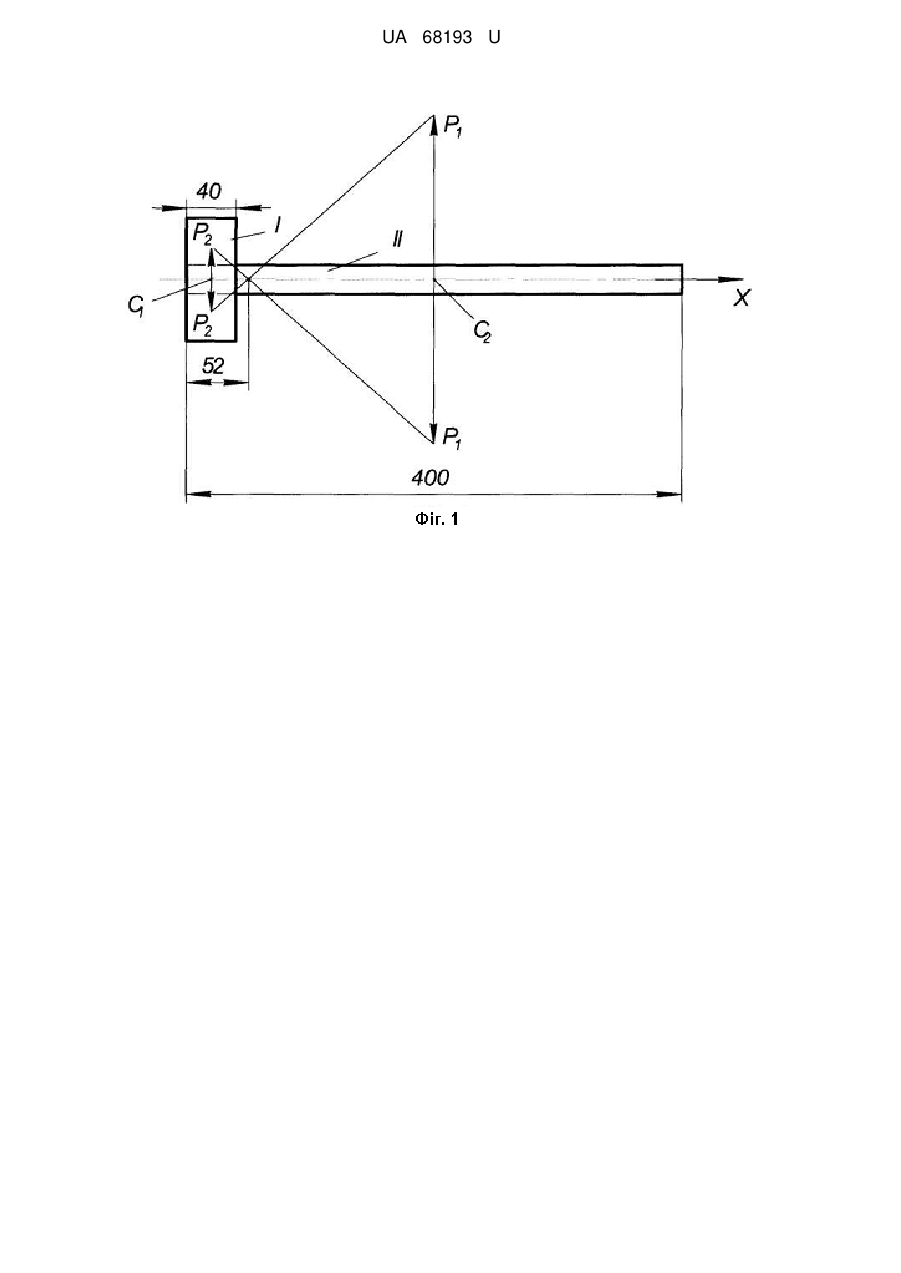
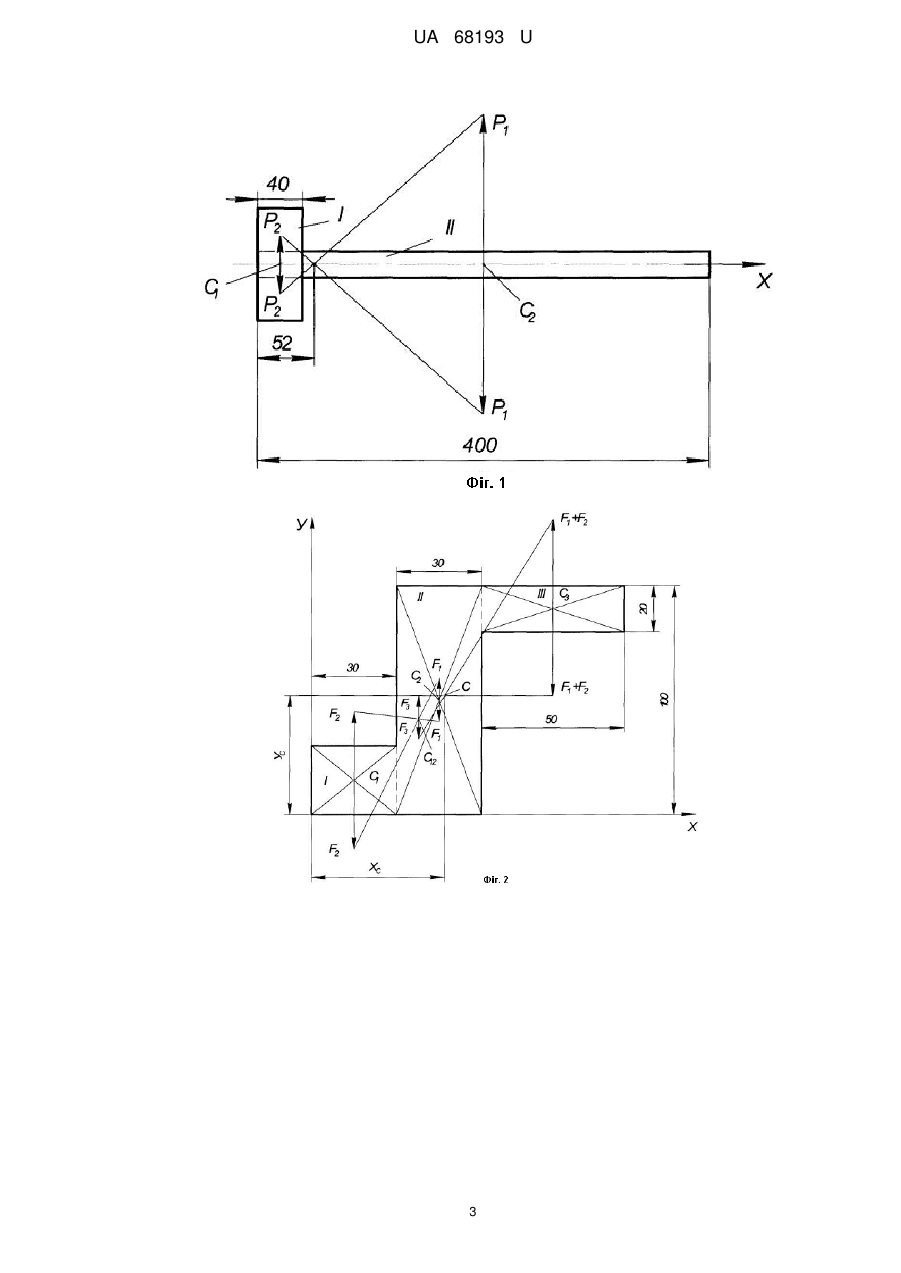
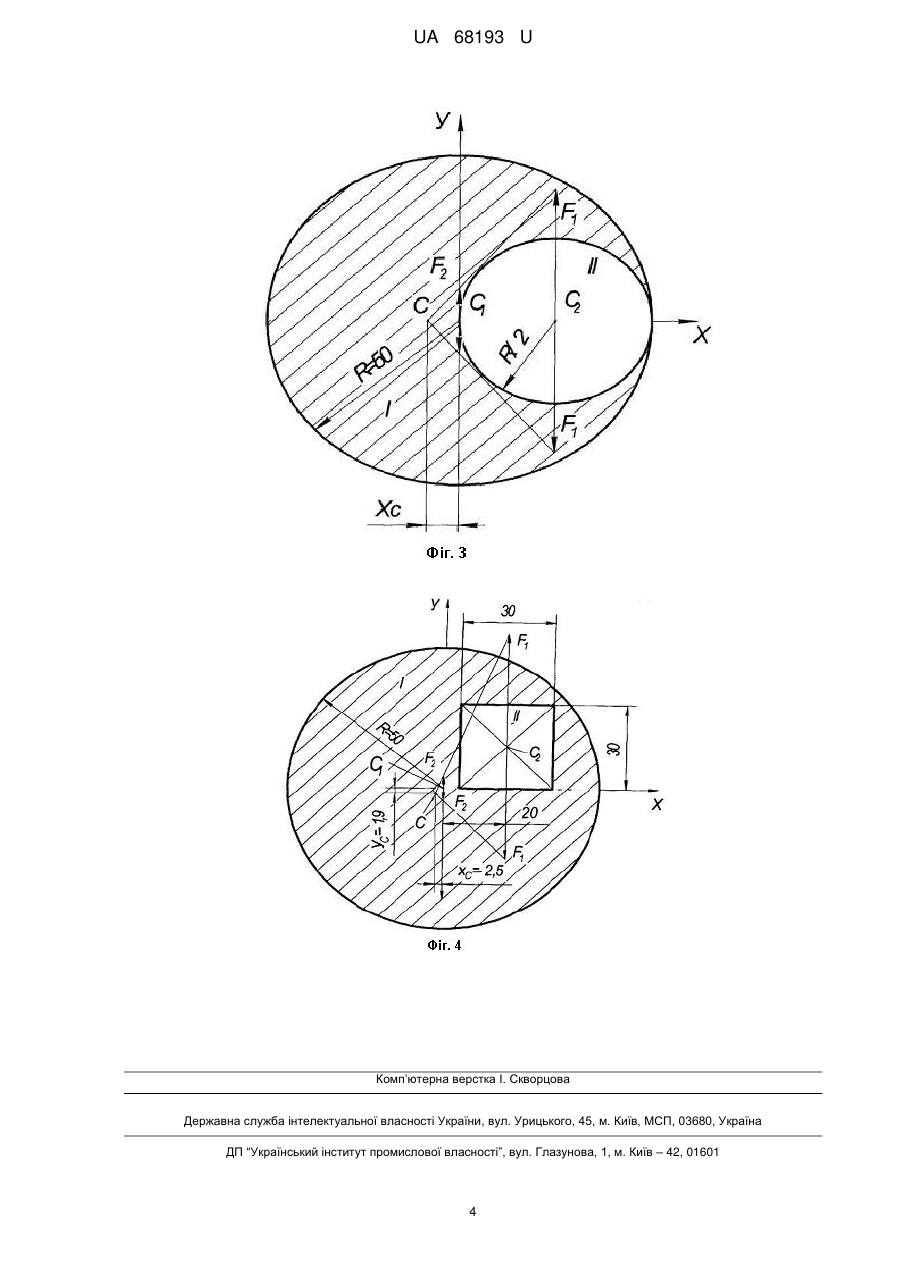
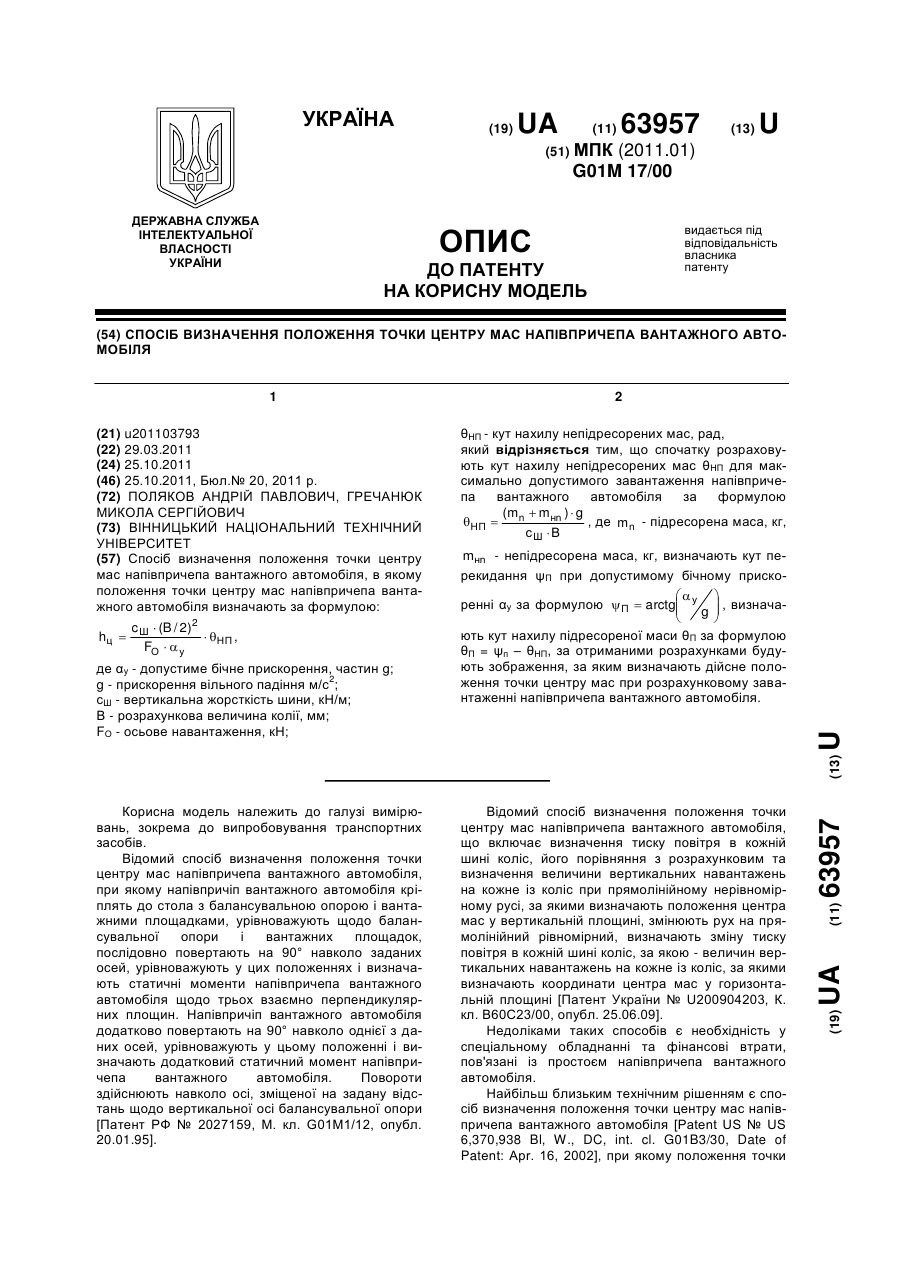
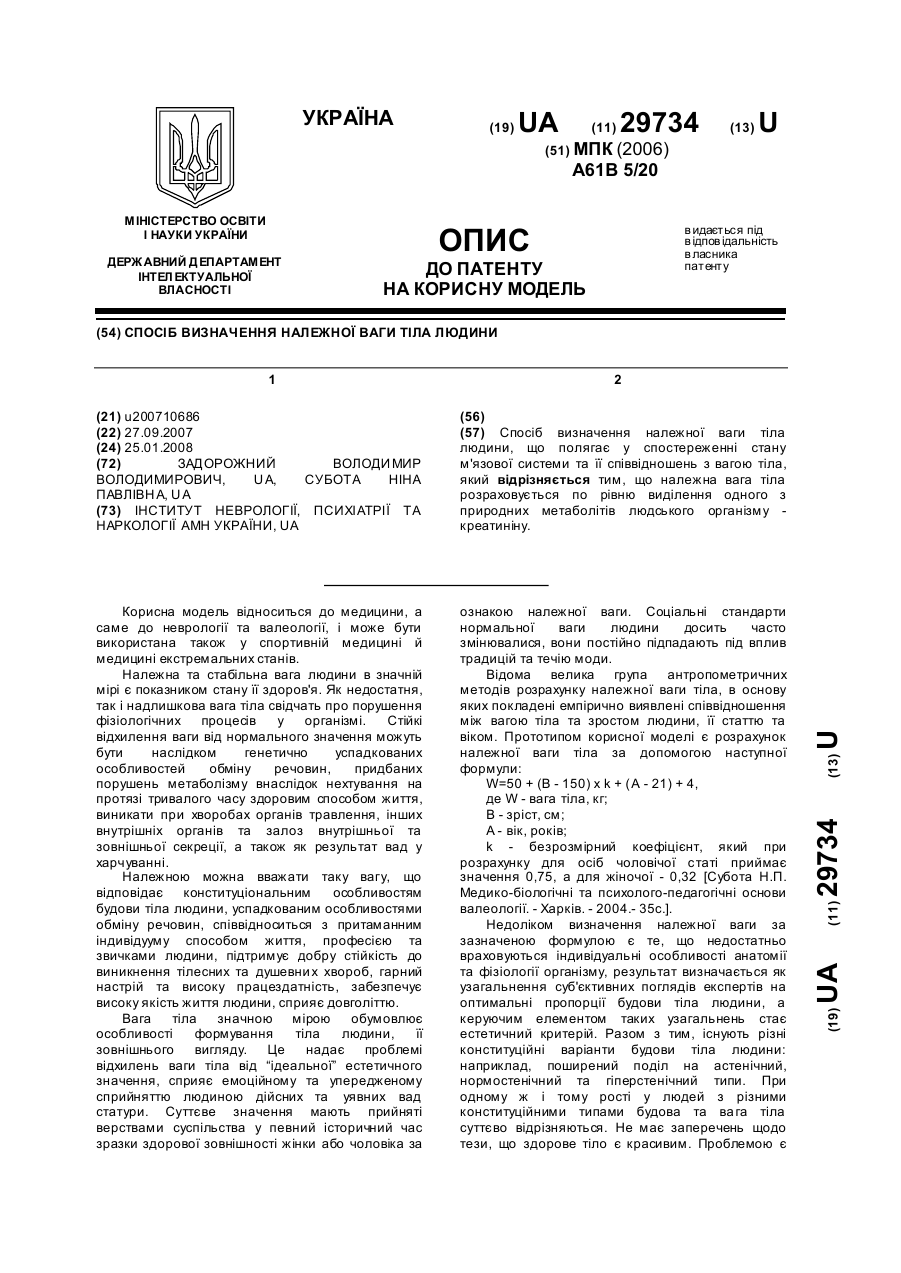
Реферат: Спосіб визначення положення центру ваги тіла належить до машинобудування. Технічний результат корисної моделі полягає в підвищенні точності розрахунку, продуктивності оператора і не вимагає від оператора спеціальних знань з дисципліни «Теоретична механіка». UA 68193 U (12) UA 68193 U UA 68193 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі загального машинобудування, зокрема до графічних способів визначення центра тяжіння (ваги) тіла або центра тяжіння об'єму чи площі (фігури, об'єкта), які складаються із декількох частин, координати центрів тяжіння, і сили чи об'єми або площі яких відомі. Такі способи використовують під час проектування технічного виробу або після виготовлення дослідного зразка, як альтернативні аналітичному способу визначення центру тяжіння об'єкта. Відомий графічний спосіб визначення центру тяжіння об'єкта, при якому все зводиться до побудови силового і мотузкового багатокутників Варіньйона (Каплунова А.В. Методика та приклади розв'язування задач з теоретичної механіки. / А.В. Каплунова, В.А. Михайловський, І.П. Сірош та ін. Навчальний посібник - К.: ДВСЛ, 1961. - c. 120. Кільчевський М.О. Курс теоретичної механіки. Т. І. Кінематика, статика, динаміка точки. / М.О. Кільчевський. Підручник. К.: Вища школа, 1972. - С. 244-249. Павловський М.А. Теоретична механіка. (A.M. Павловський. Підручник. - К.: Техніка, 2004. - 512 с.) Недоліком такого способу є громіздкість виконування операцій при побудові силових і мотузкових багатокутників у двох взаємно перпендикулярних площинах або у зміні положення об'єкта, а паралельне перенесення ліній призводить до неточностей в розрахунку і низької продуктивності оператора, який визначає центр тяжіння об'єкта. Задачею корисної моделі є зменшення кількості графічних операцій, що підвищує точність розрахунку, продуктивність оператора і не вимагає від оператора спеціальних знань з дисципліни «Теоретична механіка». Поставлена задача вирішується тим, що більший вектор сили тяжіння відкладають у певному масштабі у двох протилежних вертикальних напрямках у центрі тяжіння складової частини дії меншої сили тяжіння, а вектор меншої сили тяжіння відкладають у такому ж масштабі у двох вертикальних напрямках у центрі тяжіння складової частини дії більшої сили тяжіння. Кінець вектора одної складової частини фігури (тіла), що спрямований вгору і кінець вектора другої складової частини, що спрямований вниз, сполучають прямою лінією. Аналогічно сполучають лінією кінці складових частин фігури (тіла), спрямовані вниз і вгору. Перетин цих ліній і буде центром тяжіння всього тіла (фігури, рівнодійної вертикальним навантаженням на балку тощо) для випадку, коли в тілі (фігурі) відсутні отвори, так звані «від'ємні» маси, площі чи об'єми. При наявності «від'ємних» мас, об'ємів чи площ у складових частинах об'єкта поставлена задача корисної моделі вирішується аналогічно описаному вище, стосовно розміщення векторів сил, об'ємів чи площ у складових частинах, а саме: вектори сил, об'ємів чи площ у певному масштабі відкладають у двох протилежних вертикальних напрямках: більші сили, об'єми чи площі - у центрі тяжіння менших сил, об'ємів чи площ, а менші - у центрі тяжіння більших сил, об'ємів чи площ. Центр тяжіння всього об'єкта у даному випадку, буде знаходитись в точці перетину ліній, які сполучають кінці векторів складових частин, причому одна з них - вектори направлені вгору, друга - вниз. На фіг. 1, фіг. 2, фіг. 3 і фіг. 4 зображені схеми об'єктів до визначення центра тяжіння пропонованим графічним способом; на фіг. 1 - схема молотка; на фіг. 2 - схема плоскої фігури, складових частин якої більше двох; на фіг. 3 - схема плоскої фігури з «від'ємною» площею складової її частини; на фіг. 4 - те ж, що і на фіг. 3, але центр тяжіння плоскої фігури не знаходиться на осі матеріальної симетрії складових її частин. Маємо молоток, який має металеву головку І (фіг. 1), сила тяжіння якої Р1=10 Н і дерев'яну рукоятку II, сила тяжіння якої Р2=2 Н. Розміри молотка і центрів тяжіння його складових частин наведені на фіг. 1 у міліметрах в певному масштабі. Задача корисної моделі - визначити центр тяжіння молотка пропонованим графічним способом. Відкладаємо вектор сили тяжіння Р, головки у певному масштабі у двох протилежних вертикальних напрямках, який більший за величиною вектора Р2 у центрі тяжіння С2 складової частини (рукоятки) і аналогічно силу тяжіння Р2 рукоятки - у центрі тяжіння С1 головки. Сполучаємо кінці векторів лініями, як показано на фіг. 1. Точка перетину С цих ліній і є центром тяжіння молотка. У даному випадку центр тяжіння молотка знаходиться на осі матеріальної симетрії складових його частин - головки та рукоятки і тому достатньо було б знайти точку перетину однієї лінії, що сполучає кінці векторів сил з віссю X, тобто метод симетрії зберігається. У випадку, коли маємо плоску фігуру, складових частин якої більше двох, центр тяжіння всієї фігури визначають пропонованим способом аналогічно, як і для молотка, в наступному порядку: розбиваємо плоску фігуру на декілька складових частин І, II, III (фіг. 2), площі F1, F2 і F3 і 1 UA 68193 U 5 10 15 20 25 30 35 координати центрів тяжіння С1, С2 і С3 яких відомі - знаходяться на перетині діагоналей прямокутників. В першу чергу знаходимо центр тяжіння складових частин І і II. Це буде точка С12, а сумарна площа F1+F2. Далі розглядаємо фігуру, яка складається із двох прямокутників: І і II з центром тяжіння в точці С3. Потім пропонованим способом визначаємо одночасно координати Х с і Ус всієї фігури, що не характерно для відомого способу за допомогою силових і мотузкових багатокутників Варіньйона. При наявності від'ємних площ, сил та об'ємів координати Х с і Ус всього об'єкта визначають одночасно пропонованим графічним способом. Відмінність його тільки у порядку сполучення лініями кінців векторів. Маємо диск І (фіг. 3) з центром тяжіння в точці С1, який виготовлено з однорідного матеріалу. В диску є круглий отвір II з центром тяжіння в точці С2. Числове значення площі диска F1 і площі отвору F2 відомі. Задача корисної моделі - визначити центр тяжіння наведеної фігури пропонованим способом. Вектори площ у певному масштабі відкладають у двох протилежних вертикальних напрямках: більшу площу F1 у центрі тяжіння С2 меншої площі, а меншу площу F2 у центрі тяжіння С1 більшої площі. У даному випадку кінці векторів складових частин, направлених вгору і направлених вниз, сполучають лініями. Точка С перетину цих ліній і буде центром тяжіння диска наведеного на фіг. 3. Вирішення такого ж виду задачі пропонованим способом наведено і на фіг. 4, де центр тяжіння об'єкта не знаходиться на осі матеріальної симетрії складових його частин. У запропонованому графічному способі, в порівнянні з аналогом, дві координати центра тяжіння об'єкта, що складається з декількох частин, дві координати яких відомі, визначають однією операцією, в якій відсутнє паралельне перенесення ліній, що притаманно аналогу при побудові силового і мотузкового багатокутників, розглядаючи об'єкт у двох площинах, повернутих на 90°. Крім цього не вказано методику визначення координат центра тяжіння об'єкта при наявності його складових частин з так званими «від'ємними» площами, об'ємами та масами. У запропонованому графічному способі вектори сил (площ, об'ємів) складових частин об'єкта у певному масштабі відкладають у двох протилежних вертикальних напрямках: більші сили - у центрі тяжіння складової частини дії менших сил, а менші сили - у центрі тяжіння складової частини дії більших сил. Кінець вектора сили одної частини, що спрямований вгору, і кінець вектора сили другої частини, що спрямований вниз сполучають лінією. Аналогічно сполучають лінією кінці векторів сил, що спрямовані відповідно вниз і вгору. Точка перетину цих ліній і буде центром тяжіння об'єкта з двома координатами. У випадку наявності в об'єкті складових частин з від'ємними площами (об'ємами, масами) кінці векторів сил складових частин сполучають дещо по іншому. Однією лінією сполучають кінці векторів сил, спрямованих вгору, а другою лінією - спрямованих вниз. Точка перетину цих ліній і буде центром тяжіння об'єкта. 40 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 Спосіб визначення положення центру ваги тіла, яке має складові частини, сили тяжіння і координати центрів їх тяжіння, який відрізняється тим, що вектори сил, об'ємів чи площ складових частин тіла у певному масштабі відкладають у двох протилежних вертикальних напрямках: більші сили - у центрі тяжіння складової частини дії менших сил, а менші сили - у центрі тяжіння дії більших сил; кінець вектора сили одної частини, що спрямований вгору і кінець вектора сили другої частини, що спрямований вниз, сполучають лінією; аналогічно сполучають лінією кінці векторів, що спрямовані відповідно вниз і вгору; точка перетину цих ліній і буде центром тяжіння з двома координатами всього тіла, а при наявності в тілі від'ємних мас (площ чи об'ємів) однією лінією сполучають кінці векторів сил спрямованих вгору, а другою лінією - спрямованих вниз і при цьому точка перетину цих ліній буде центром тяжіння з двома координатами всього тіла. 2 UA 68193 U 3 UA 68193 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of position of center of gravity of a body
Автори англійськоюPohorilets Oleksandr Mykolaiovych, Aniskevych Leonid Volodymyrovych
Назва патенту російськоюСпособ определения положения центра тяжести тела
Автори російськоюПогорилец Александр Николаевич, Анискевич Леонид Владимирович
МПК / Мітки
МПК: G01B 5/00
Мітки: ваги, тіла, спосіб, визначення, положення, центру
Код посилання
<a href="https://ua.patents.su/6-68193-sposib-viznachennya-polozhennya-centru-vagi-tila.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення положення центру ваги тіла</a>
Спосіб визначення положення точки центру мас напівпричепа вантажного автомобіля
Номер патенту: 63957
Опубліковано: 25.10.2011
Автори: Поляков Андрій Павлович, Гречанюк Микола Сергійович
МПК: G01M 17/00
Мітки: визначення, положення, точки, центру, вантажного, мас, спосіб, напівпричепа, автомобіля
Формула / Реферат:
Спосіб визначення положення точки центру мас напівпричепа вантажного автомобіля, в якому положення точки центру мас напівпричепа вантажного автомобіля визначають за формулою:,де αу - допустиме бічне прискорення, частин g;g - прискорення вільного падіння м/с2; сШ - вертикальна жорсткість шини, кН/м;В - розрахункова величина колії, мм;...
Спосіб визначення належної ваги тіла людини
Номер патенту: 29734
Опубліковано: 25.01.2008
Автори: Субота Ніна Павлівна, Задорожний Володимір Володимирович
МПК: A61B 5/20
Мітки: людини, тіла, ваги, спосіб, належної, визначення
Формула / Реферат:
Спосіб визначення належної ваги тіла людини, що полягає у спостереженні стану м'язової системи та її співвідношень з вагою тіла, який відрізняється тим, що належна вага тіла розраховується по рівню виділення одного з природних метаболітів людського організму - креатиніну.
Спосіб визначення положення центра ваги колісного транспортного засобу
Номер патенту: 19716
Опубліковано: 15.12.2006
Автори: Білодід Володимир Петрович, Палюх Володимир Михайлович, Козлинський Мирослав Петрович, Житенко Олександр Вікторович, Слюсаренко Олександр Іванович, Бурковський Анатолій Сергійович
МПК: B60C 23/00
Мітки: спосіб, засобу, положення, центра, транспортного, колісного, визначення, ваги
Формула / Реферат:
Спосіб визначення положення центра ваги колісного транспортного засобу, що включає визначення тиску повітря в кожній шині коліс, його порівняння з розрахунковим та визначення величини вертикальних навантажень на кожне із коліс, який відрізняється тим, що визначають зміну тиску повітря в кожній шині коліс та величини вертикальних навантажень на кожне із коліс при прямолінійному русі під час розгону, за якими визначають положення центра ваги у...
Спосіб і пристрій для визначення положення видовженого об’єкта відносно поверхні тіла-перепони за допомогою електромагнітного випромінювання
Номер патенту: 69402
Опубліковано: 15.09.2004
Автори: Теллєр Стеен, Лундгрен Ян, Бруун Ніколай, Обое Єнсен Томас
МПК: G01B 11/00, G01S 17/06, B23K 26/02, G01B 15/00, B23K 26/04
Мітки: визначення, спосіб, видовженого, допомогою, тіла-перепони, електромагнітного, відносної, випромінювання, пристрій, об'єкта, положення, поверхні
Формула / Реферат:
1. Спосіб визначення положення видовженого, порівняно вузького об'єкта відносно поверхні переважно дископодібного тіла-перепони, розміщеного перед згаданим об'єктом і орієнтованого під кутом до нього, за допомогою електромагнітного випромінювання, зокрема іонізувального випромінювання, для керування переміщенням з'єднаного з ним устаткування для обробки, зокрема для лазерного зварювання, який відрізняється тим, що зі сторони тіла-перепони,...
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині
Номер патенту: 19059
Опубліковано: 15.12.2006
Автори: Денис Василь Володимирович, Козлинський Мирослав Петрович
МПК: B60C 23/00
Мітки: центра, спосіб, засобу, вертикальний, колісного, визначення, ваги, положення, транспортного, площині
Формула / Реферат:
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині, що включає визначення тиску повітря в кожній шині коліс, його порівняння з розрахунковим, який відрізняється тим, що визначають зміну тиску повітря в кожній шині коліс при криволінійному русі транспортного засобу, визначають величини вертикальних і горизонтальних навантажень на кожне з коліс, за якими визначають положення центра ваги колісного...
Попередній патент: Електромеханічні ваги
Наступний патент: Приміщення круглого типу для вирощування свинок і кнурців
Випадковий патент: Датчик