Спосіб визначення положення промірної вертикалі з судна
Номер патенту: 70810
Опубліковано: 12.05.2008
Автори: Бурачек Всеволод Германович, Мамонтова Людмила Степанівна, Крячок Сергій Дмитрович, Боровий Валентин Олександрович, Мовенко Віктор Іванович
Формула / Реферат
Спосіб визначення положення промірної вертикалі з судна, заснований на оберненій геодезичній засічці, який складається з вимірювання глибин і фотографування берегових орієнтирів з подальшою обробкою даних, який відрізняється тим, що зображення берегових орієнтирів приймають на цифровий фотоелектричний аналізатор, формуючи їх оптично, при цьому виконують панорамне сканування берегових орієнтирів навколо вертикальної осі з послідовними дискретними експозиціями, після чого проводять накладення суміжних кадрів з перекриттям зображень берегових орієнтирів і визначають горизонтальні кути між орієнтирами за величинами піксельних інтервалів, враховуючи рух судна під час експозиції.
Текст
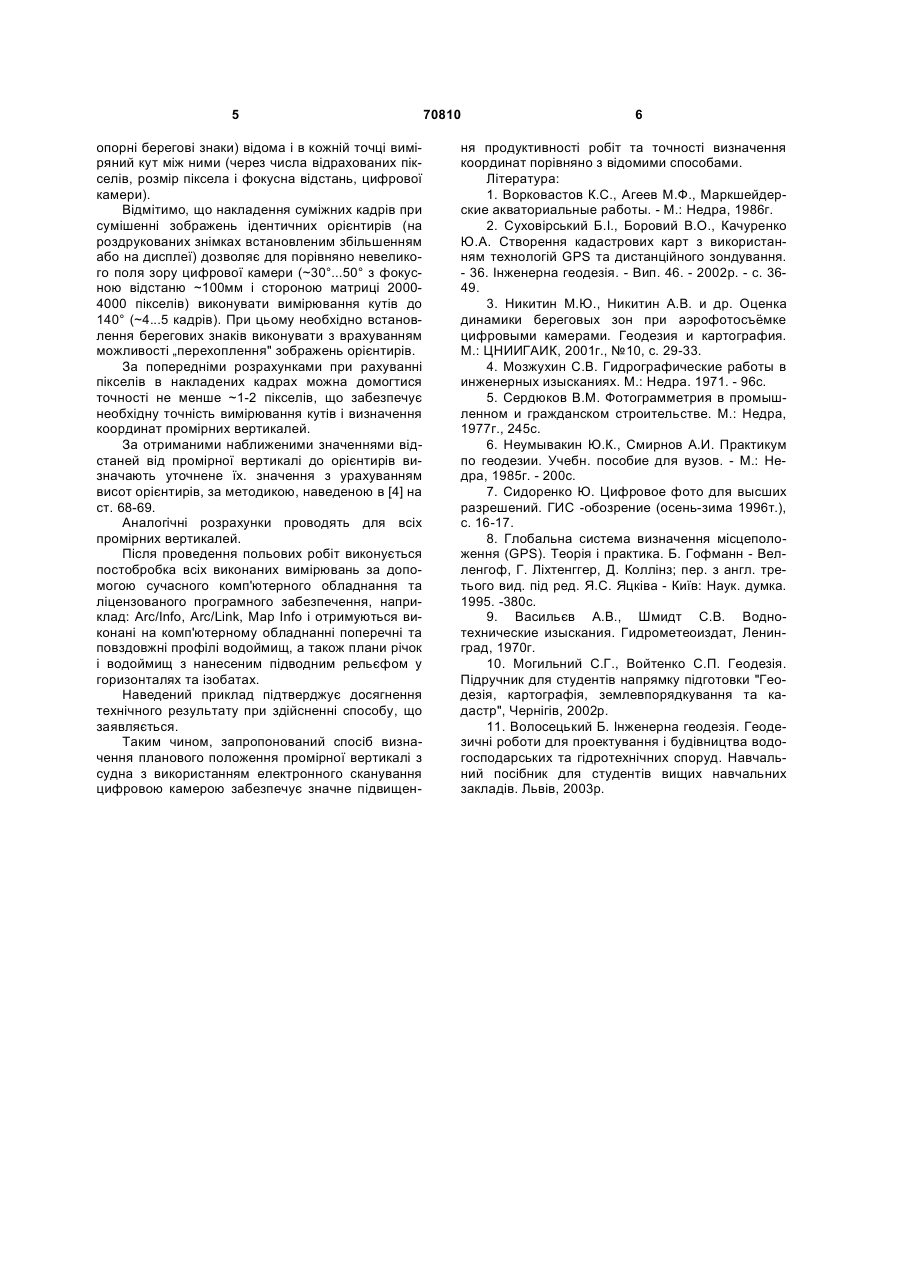
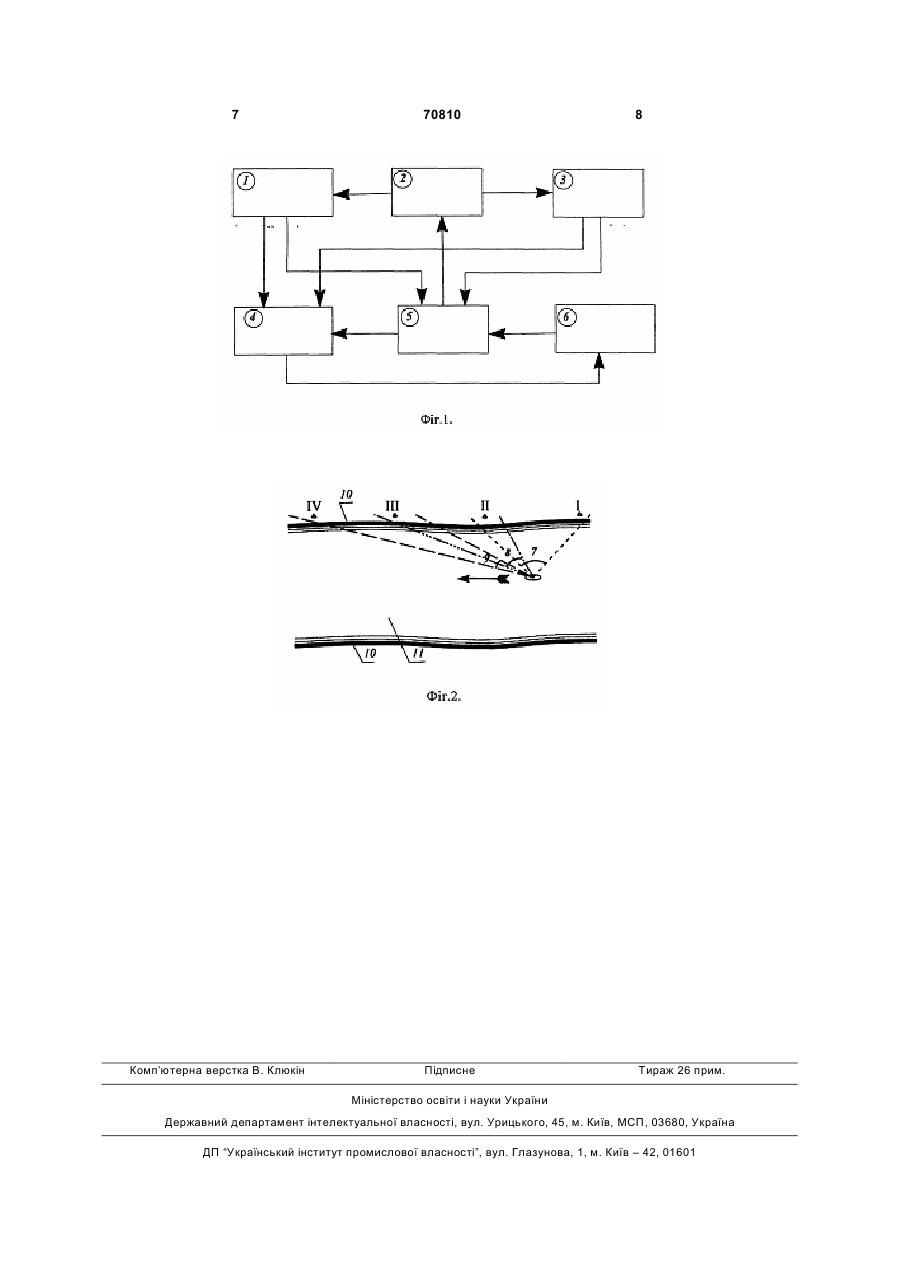
Спосіб визначення положення промірної вертикалі з судна, заснований на оберненій геодезичній засічці, який складається з вимірювання глибин і фотографування берегових орієнтирів з подальшою обробкою даних, який відрізняється тим, що зображення берегових орієнтирів приймають на цифровий фотоелектричний аналізатор, формуючи їх оптично, при цьому виконують панорамне сканування берегових орієнтирів навколо вертикальної осі з послідовними дискретними експозиціями, після чого проводять накладення суміжних кадрів з перекриттям зображень берегових орієнтирів і визначають горизонтальні кути між орієнтирами за величинами піксельних інтервалів, враховуючи рух судна під час експозиції. Винахід відноситься до геодезичної галузі та може бути використаний у водно-технічних вишукуваннях для визначення положення промірної вертикалі з судна. Відомі способи визначення координат промірного судна: - геодезичний, з використанням теодоліта, мензули, секстана [1]; - радіогеодезичний, де застосовуються радіовіддалеміри, радіолаги, фазові зонди [9,11]; - GPS - вишукування з використанням космічного сигналу з супутників [8]; - фотогеодезичний, де застосовуються аерофотоапарати чи фототеодоліти [9]. Недоліком геодезичного і радіогеодезичного методу є порівняно невисока точність через несинхронність вимірювання кутів та відстаней з берегового базису на судно і дрейфом судна під час вимірювань, вплив течії, невисока продуктивність робіт завдяки незначному ступеню автоматизації процесу вимірювань та обробки результатів. Недоліком GPS-визначень є необхідність одночасного безперервного спостереження не менше чотирьох супутників, що не є завжди можливим через наявну горбисту місцевість лісового покриву чи висотних споруд на березі водойма і т.ін [2]. Відомо фотогеодезичний спосіб [9], який є найбільш близьким аналогом, де використано принцип зворотньої геодезичної засічки. Він включає фотографування за допомогою аерофотоапарата чи фототеодоліта берегової лінії з орієнтирами по одному кадру для промірної вертикалі та одночасним визначенням глибини водойма ехолотом, з подальшою лабораторною обробкою негативів, фотограмметричними вимірюваннями на знімках, які включають обов'язкове калібрування зображень та визначення координат орієнтирів в системі координат знімка з наступним розрахунком планових координат вузлової точки об'єктива за відомими плановими координатами орієнтирів. Недоліком способу є те, що через обмежений кут поля зору аерофотоапаратів [3] і необхідності мати не менше трьох орієнтирів на один знімок та (19) UA (11) 70810 (13) C2 (21) 20031212913 (22) 29.12.2003 (24) 12.05.2008 (46) 12.05.2008, Бюл.№ 9, 2008 р. (72) БОРОВИЙ ВАЛЕНТИН ОЛЕКСАНДРОВИЧ, UA, БУРАЧЕК ВСЕВОЛОД ГЕРМАНОВИЧ, UA, КРЯЧОК СЕРГІЙ ДМИТРОВИЧ, UA, МОВЕНКО ВІКТОР ІВАНОВИЧ, UA, МАМОНТОВА ЛЮДМИЛА СТЕПАНІВНА, UA (73) ЧЕРНІГІВСЬКИЙ ДЕРЖАВНИЙ ІНСТИТУТ ЕКОНОМІКИ І УПРАВЛІННЯ, UA (56) UA 52053 A, 16.12.2002 Васильев А.В., Шмидт С.В. Водно-технические изыскания. - Л.: Гидрометеорологическое изд-во, 1970. - С. 115-118 RU 2207504 C1, 27.06.2003 SU 1278580 A1, 23.12.1986 JP 63286706, 24.11.1988 Никитин М.Ю., Никитин А.В., Дунц А.Л., Льготин В.А., Егоров Б.А. Оценка динамики береговых зон 3 обмеженістю кутів зворотної засічки від 30° до 150° [6], необхідно створити густу мережу берегових орієнтирів для покриття ними всього району промірних робіт. Особливо це стосується малих відстаней промірних вертикалей до берега. Це, а також наявність досить тривалого фотолабораторного процесу, необхідність фотограмметричних вимірювань з використанням механічних засобів та візуальних спостережень, або ж процесу сканування кожного знімка та введення поправок за сканування для подальшого автоматизованого способу обробки та необхідності калібрування кожного знімка окремо - для введення поправок у вимірювання за сканування, дисторсію об'єктива камери та коробления фотоплівки після фотолабораторної обробки та висихання значно подовжують терміни польових та камеральних робіт та збільшують трудомісткість робіт. В основу винаходу поставлено мету: у способі визначення положення промірної вертикалі з судна шляхом проведення електронного сканування берегової лінії з орієнтирами та застосування комп'ютерної обробки отриманих цифрових даних зменшити терміни польових та камеральних робіт за рахунок розширення сектору знімання до 360°, отримання даних знімання в цифровому вигляді та подальшої їх комп'ютерної обробки, виключення з технології робіт фотолабораторного процесу та зменшення кількості орієнтирів на березі. Поставлена задача вирішується тим,що в способі визначення положення промірної вертикалі з судна, що включає фотографування берегової лінії з орієнтирами та одночасним визначенням координат орієнтирів на зображеннях в системі координат знімка та розрахунком координат вузлової точки об'єктива камери з урахуванням відомих координат орієнтирів, згідно з винаходом, виконують панорамне сканування берегової лінії з орієнтирами, а отримані цифрові дані через оперативну пам'ять камери вводять в комп'ютер та проводять зрощення суміжних кадрів з використанням зображень штучних та природних орієнтирів (Фіг.1 – Схема електронного сканування берегової лінії з орієнтирами I, II, III, IV). Панорамне сканування берегової лінії забезпечує збільшення сектору знімання до 360°, що дозволяє встановити орієнтири на більшій відстані один від одного, що веде до зменшення їх кількості і терміну проведення підготовчих робіт на їх встановлення та визначення координат. Комп'ютерна технологія дозволяє автоматизувати обробку цифрових даних і суттєво скоротити час на отримання кінцевих результатів -планових координат промірних вертикалей. Крім того, згідно з винаходом в розрахунках по визначенню положення промірної вертикалі з судна враховуються і висоти орієнтирів, що дозволяє підвищити точність визначення вказаних координат. Спосіб, що заявляється, особливо ефективний в порівнянні з прототипом у випадку, коли водойм має замкнену форму, що дозволяє розташувати орієнтири вздовж усієї берегової смуги, по колу. Приладна реалізація способу визначення положення промірної вертикалі з судна з подальшою 70810 4 комп'ютерною обробкою отриманої інформації зображена на Фіг.1 - блок-схема пристрою, для вимірювання глибин водойм та визначення положення промірної вертикалі з судна. 1 - фотознімальний блок, що складається з цифрової камери та механічного пристрою, які встановлені на гіроплатформі; 2 - таймер; 3 - ехолот; 4 - блок накопичення даних; 5 - блок управління; 6 - малогабаритний компактний комп'ютер. Цифрова знімальна камера блоку 1 має. можливість обертатись навколо вертикальної осі на 360° за допомогою пристрою, аналогічному описаному в [1] на ст. 115, причому швидкість обертання розраховується так, щоб під час сканування при даному часові експозиції забезпечити автоматичне перекриття суміжних кадрів не менше ніж на 2025%. Сама камера разом з електроприводом встановлюється на гіростабілізовану платформу. Робота приладу на даній промірній вертикалі по запропонованому способу виконується наступним чином: під час руху судна у вимірюємому створі як панорама на Фіг.2, де І, II, III, IV - берегові орієнтири, 7,8,9 - кутові зони, які відповідають кадрам зйомки при панорамному скануванні, 10 - берегова лінія, 11 – акваторія; з блоку управління 5 подається команда на механізм обертання камери блоку 1, ехолот та фотознімальний канал блока 1 через таймер 2 і одночасно проводиться вимірювання глибини водоймища і електронне сканування берегових орієнтирів та узбережжя водоймища. Отримана інформація з блоку 1 подається у блок накопичення даних 4, звідки вона за командою блоку управління 5 передається для поолідуючої обробки на комп'ютер 6 (гіроплатформа підтримується в робочому стані з моменту виходу на перший промірний створ і до кінця вимірювань з останньої промірної вертикалі). З блоків 1,3 і 6 в блок 5 йдуть сигнали, які підтверджують виконання команд. Наступна обробка включає накопичення в пам'яті комп'ютера даних про всі промірні вертикалі, визначення координат орієнтирів на зображеннях в системі координат кожного знімка, введення поправок за калібрування цифрової камери, зрощення окремих кадрів для даної промірної вертикалі за зображеннями орієнтирів та розрахунку планових координат промірної вертикалі за методиками, наведеними в [1] на ст. 118-120, або в [4] на ст. 78 та в [10] на ст. 272-273. Планове положення кожної промірної вертикалі визначають по методу зворотної засічки [1, 4]. Для цього на кожному із кадрів панорамного сканування за напрямком вимірювань (горизонтальному) відраховують кількість пікселів між двома суміжними орієнтирами. Ця операція може бути виконана візуально на екрані дисплею комп'ютера або в автоматичному режимі по ропізнаваємим штучним орієнтирам з закодованою формою візирних зображень. При русі судна його координати будуть змінюватися для різних точок (кадрів) при камеральному скануванні, так як відстань між орієнтирами (це 5 опорні берегові знаки) відома і в кожній точці виміряний кут між ними (через числа відрахованих пікселів, розмір піксела і фокусна відстань, цифрової камери). Відмітимо, що накладення суміжних кадрів при сумішенні зображень ідентичних орієнтирів (на роздрукованих знімках встановленим збільшенням або на дисплеї) дозволяє для порівняно невеликого поля зору цифрової камери (~30°...50° з фокусною відстаню ~100мм і стороною матриці 20004000 пікселів) виконувати вимірювання кутів до 140° (~4...5 кадрів). При цьому необхідно встановлення берегових знаків виконувати з врахуванням можливості „перехоплення" зображень орієнтирів. За попередніми розрахунками при рахуванні пікселів в накладених кадрах можна домогтися точності не менше ~1-2 пікселів, що забезпечує необхідну точність вимірювання кутів і визначення координат промірних вертикалей. За отриманими наближеними значеннями відстаней від промірної вертикалі до орієнтирів визначають уточнене їх. значення з урахуванням висот орієнтирів, за методикою, наведеною в [4] на ст. 68-69. Аналогічні розрахунки проводять для всіх промірних вертикалей. Після проведення польових робіт виконується постобробка всіх виконаних вимірювань за допомогою сучасного комп'ютерного обладнання та ліцензованого програмного забезпечення, наприклад: Arc/Info, Arc/Link, Map Info і отримуються виконані на комп'ютерному обладнанні поперечні та повздовжні профілі водоймищ, а також плани річок і водоймищ з нанесеним підводним рельєфом у горизонталях та ізобатах. Наведений приклад підтверджує досягнення технічного результату при здійсненні способу, що заявляється. Таким чином, запропонований спосіб визначення планового положення промірної вертикалі з судна з використанням електронного сканування цифровою камерою забезпечує значне підвищен 70810 6 ня продуктивності робіт та точності визначення координат порівняно з відомими способами. Література: 1. Ворковастов К.С., Агеев М.Ф., Маркшейдерские акваториальные работы. - Μ.: Недра, 1986г. 2. Суховірський Б.І., Боровий Β.Ο., Качуренко Ю.А. Створення кадастрових карт з використанням технологій GPS та дистанційного зондування. - 36. Інженерна геодезія. - Вип. 46. - 2002р. - с. 3649. 3. Никитин М.Ю., Никитин А.В. и др. Оценка динамики береговых зон при аэрофотосъёмке цифровыми камерами. Геодезия и картография. М.: ЦНИИГАИК, 2001г., №10, с. 29-33. 4. Мозжухин С.В. Гидрографические работы в инженерных изысканиях. М.: Недра. 1971. - 96с. 5. Сердюков В.М. Фотограмметрия в промышленном и гражданском строительстве. М.: Недра, 1977г., 245с. 6. Неумывакин Ю.К., Смирнов А.И. Практикум по геодезии. Учебн. пособие для вузов. - М.: Недра, 1985г. - 200с. 7. Сидоренко Ю. Цифровое фото для высших разрешений. ГИС -обозрение (осень-зима 1996т.), с. 16-17. 8. Глобальна система визначення місцеположення (GPS). Теорія і практика. Б. Гофманн - Велленгоф, Г. Ліхтенггер, Д. Коллінз; пер. з англ. третього вид. під ред. Я.С. Яцківа - Київ: Наук. думка. 1995. -380с. 9. Васильєв А.В., Шмидт С.В. Воднотехнические изыскания. Гидрометеоиздат, Ленинград, 1970г. 10. Могильний С.Г., Войтенко С.П. Геодезія. Підручник для студентів напрямку підготовки "Геодезія, картографія, землевпорядкування та кадастр", Чернігів, 2002р. 11. Волосецький Б. Інженерна геодезія. Геодезичні роботи для проектування і будівництва водогосподарських та гідротехнічних споруд. Навчальний посібник для студентів вищих навчальних закладів. Львів, 2003р. 7 Комп’ютерна верстка В. Клюкін 70810 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of measuring vertical from vessel
Автори англійськоюBorovyi Valentyn Oleksandrovych, Burachek Vsevolod Hermanovych, Kriachok Serhii Dmytrovych, Movenko Viktor Ivanovych, Mamontova Liudmyla Stepanivna
Назва патенту російськоюСпособ определения положения промерной вертикали с судна
Автори російськоюБоровый Валентин Александрович, Бурачек Вселовод Германович, Крячок Сергей Дмитриевич, Мовенко Виктор Иванович, Мамонтова Людмила Степановна
МПК / Мітки
МПК: G01C 13/00, G01C 11/00
Мітки: промірної, спосіб, визначення, судна, положення, вертикалі
Код посилання
<a href="https://ua.patents.su/4-70810-sposib-viznachennya-polozhennya-promirno-vertikali-z-sudna.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення положення промірної вертикалі з судна</a>
Спосіб визначення вертикалі на рухомому об’єкті
Номер патенту: 75913
Опубліковано: 15.06.2006
Автори: Бурачек Всеволод Германович, Шульц Роман Вікторович, Крельштейн Петро Давидович, Суковенко Оксана Володимирівна
МПК: G01C 19/00
Мітки: спосіб, вертикалі, рухомому, об'єкти, визначення
Формула / Реферат:
1. Спосіб визначення вертикалі на рухомому об'єкті, заснований на властивості рідинного рівня з повітряною бульбашкою індексувати горизонтальне положення основи рівня та властивості гіроскопічного датчика зберігати незмінним положення осі гіроскопа у просторі, який відрізняється тим, що під час руху об'єкта вимірюють зміну положення бульбашки рідинного рівня оптико-електронним способом, одночасно вимірюють зміну положення корпусу...
Пристрій визначення вертикалі на рухливому об`єкті
Номер патенту: 10397
Опубліковано: 15.11.2005
Автори: Бурачек Всеволод Германович, Крельштейн Петро Давидович, Надточій Олександр Володимирович, Шульц Роман Володимирович, Якунін Олександр Володимирович
МПК: G02B 13/08
Мітки: вертикалі, пристрій, рухливому, об'єкти, визначення
Формула / Реферат:
Пристрій визначення вертикалі на рухливому об'єкті, що містить рідинний рівень з повітряною бульбашкою, гіроскопічний блок та блок управління, який відрізняється тим, що в ньому рідинний рівень з повітряною бульбашкою та гіроскопічний блок закріплені в єдиному корпусі, при цьому пристрій містить оптико-електронний блок вимірювання положення бульбашки рівня, датчик вимірювання положення осі гіроскопа, блок обробки інформації; при цьому виходи...
Оптико-електронний пристрій визначення вертикалі
Номер патенту: 73328
Опубліковано: 15.07.2005
Автори: Бурачек Всеволод Германович, Крельштейн Петро Давидович, Боровой Валентин Олександрович, Суковенко Оксана Володимирівна, Крячок Сергій Дмитрович
МПК: G01C 9/00
Мітки: пристрій, вертикалі, визначення, оптико-електронний
Формула / Реферат:
Оптико-електронний пристрій визначення вертикалі, який має рідинний бульбашковий рівень, оптико-електронний аналізатор з об'єктивом і ПЗС-матрицею, корпус, блок підсвічування, електронний блок обробки інформації та керування, який відрізняється тим, що верхня частина рівня обмежена двовгнутою лінзою, при цьому величина радіуса нижньої сфери лінзи залежить від заданої точності і діапазону вимірювань пристрою, а радіус верхньої сфери лінзи...
Система для визначення положення мобільного радіотрансивера (варіанти) та спосіб визначення положення мобільного радіотрансивера
Номер патенту: 64780
Опубліковано: 15.03.2004
Автори: Соліман Самір С., Гілгаузен Клайн С.
МПК: G01S 5/00, G01S 5/02, G01S 1/00
Мітки: мобільного, радіотрансивера, визначення, варіанти, система, положення, спосіб
Формула / Реферат:
1. Система для визначення положення мобільного радіотрансивера, яка має: базову станцію , яка відрізняється тим, що вміщує засоби обчислення доплерівського зсуву відносно базової станції сигналів, які передають перший, другий і третій супутники, засоби обчислення першого набору псевдовідстаней 2, 3 відповідно першого і другого супутників відносно базової станції, засоби передачі інформації, яка ідентифікує супутник, інформації про...
Спосіб визначення положення осей координат інерціальної навігаційної системи об’єкта відносно базової системи (варіанти)
Номер патенту: 59494
Опубліковано: 15.09.2003
Автори: Рачук Владімір Сєргєєвіч, Борісов Андрєй Владіміровіч, Карпов Анатолій Стєпановіч, Іванов Робєрт Константіновіч, Ковалєвскій Міхаіл Марковіч, Монахов Юрій Владіміровіч
МПК: G01S 5/02, G01S 5/00, G01S 5/04
Мітки: відносної, варіанти, інерціальної, системі, навігаційної, визначення, осей, положення, координат, базової, спосіб, об'єкта
Формула / Реферат:
1. Спосіб визначення положення осей координат інерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3), що включає навігаційні вимірювання об'єкта (1), рухомого в інерціальному просторі, в базовій системі координат (3) і в інерціальній системі координат об'єкта (2), який відрізняється тим, що:- в моменти часу tі і tі+1 вимірюють координати рухомого об'єкта (1) в системі координат Глобальної навігаційної...
Попередній патент: Вогнегасний порошок багатоцільового призначення та спосіб його виготовлення
Наступний патент: Лопатка й обертовий вузол турбореактивного двигуна
Випадковий патент: Радіальний підшипник