Спосіб створення руху балістичній ракеті
Формула / Реферат
Спосіб створення руху балістичній ракеті, що полягає в прикладенні реактивної сили в її донній частині, який відрізняється тим, що додатково реактивну силу прикладають в її головній частині, причому сумарний вектор тяги реактивних двигунів, розташованих в головній частині балістичної ракети більший від сумарного вектора тяги реактивних двигунів, розташованих в її донній частині.
Текст
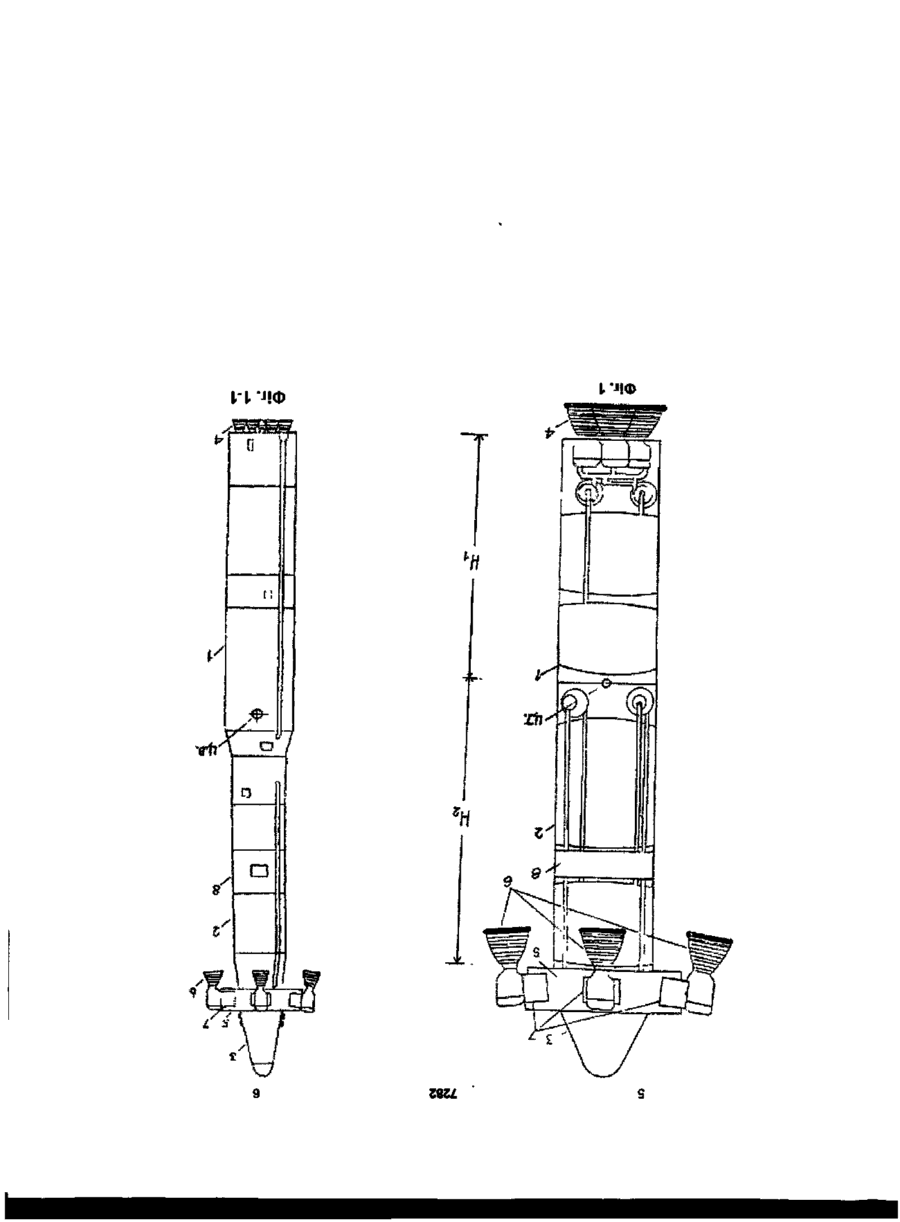
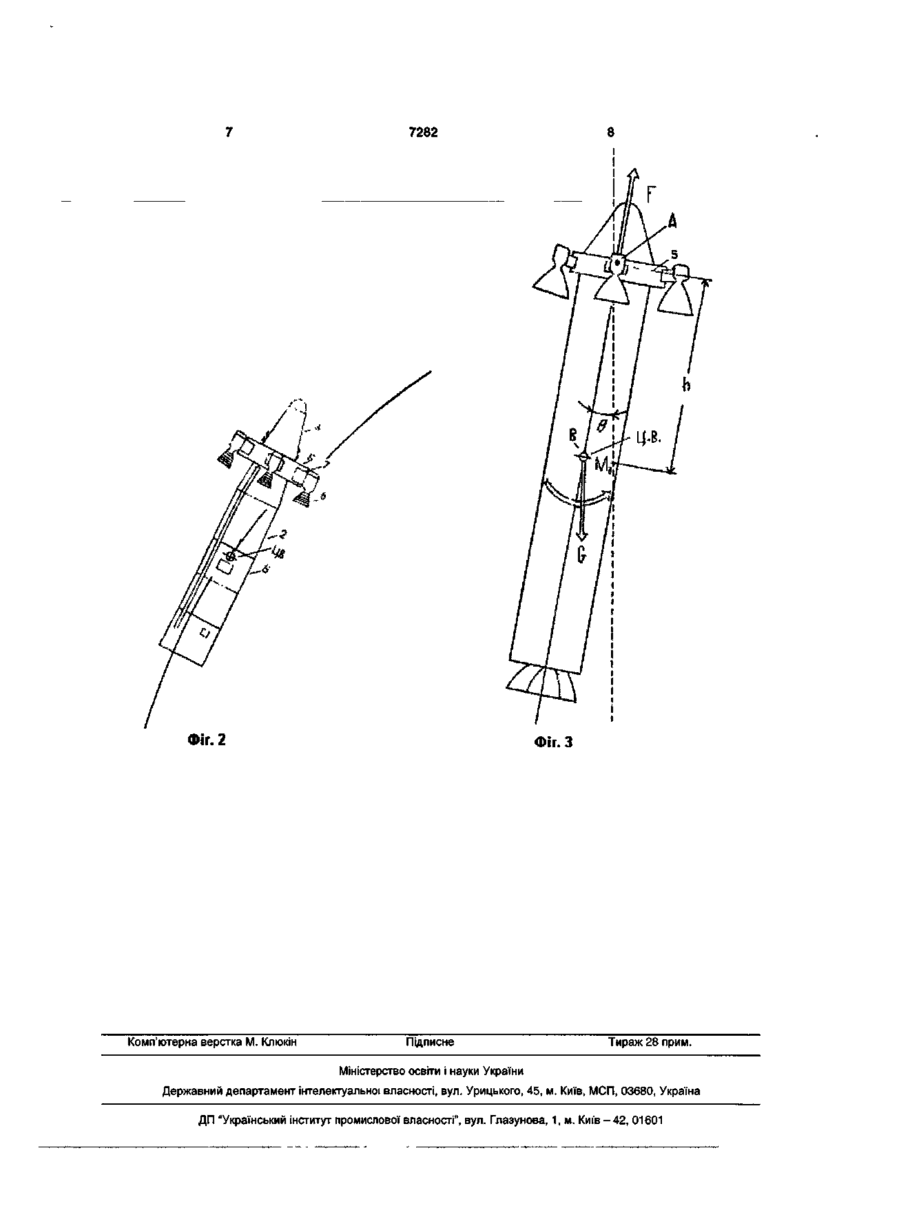
Спосіб створення руху балістичній ракеті, що полягає в прикладенні реактивної сили в її донній частині, який відрізняється тим, що додатково реактивну силу прикладають в її головній частині, причому сумарний вектор тяги реактивних двигунів, розташованих в головній частині балістичної ракети більший від сумарного вектора тяги реактивних двигунів, розташованих в її донній частині. Спосіб відноситься до галузі ракетної техніки і може бути використаний при польоті балістичної ракети (БР) на траєкторії активної частини. Найбільш близьким до заявленого способу є спосіб створення руху БР який складається в прикладанні реактивної сили в її донній частині [1], прототип. Відомий спосіб створення руху БР володіє слідуючими недоліками. По перше політ БР на активній частині траєкторії нестійкий так як вектор реактивної сили (PC) прикладений до донної частини БР розташован нижче центра тяжіння, що створює перекидаючий момент при зміні початкових умов (вигорання палива) дії зовнішніх збурень.. Ця обставина потребує використання системи керування, рульових реактивних двигунів (РД) та приводів РД як це зроблено на космічній БР ,,Союз"(8К78К), або на БР Р-16(8К64Х). У випадку використання маршевих РД поворотними як це зроблено на космічній БР ,,Протон"(8К82К) це потребує використання міцних рульових приводів (РП) для стабілізації БР на траєкторії. Так, при тягнені однієї камери БР „Протон" в І 50т. необхідно використовувати РП відповідної міцності. Крім того прикладання всієї міцності до донної частини БР створює повздовжні перевантаження передаванні на корпус БР що потребує вибору товщини стінок корпус БР здатних витримувати ці перевантаження. Ця обставина обважує суху вагу БР. Задачею заявленого способу є забезпечення стійкості польоту БР на активній частині траєкторії, зменшення тягнення і відповідно габаритів мар шевих двигунів зменшення міцності РП і зменшення сухої ваги БР. Поставлена задача, вирішується тім що в способі створення БР який складається в прикладанні реактивної сили в її донній частині додатково реактивна сила прикладається в її головній частині, при цьому сумарний вектор тягнення РД розташованих у донній частині БР більше сумарного вектора тягнення РД, розташованих у донній частині БР. На фіг. 1, фіг. 1-1 представлена схема БР для здійснення способу для двоступіньчатої БР. На фіг. 2 представлена друга ступінь БР. На фіг. З показано розташування вектора тягнення F і вектора відновлюючої сили G і відновлюю чого моменту м в . БР, фіг. 1, складається з першої ступені 1, другої ступені 2, головної частини 3 (корисне навантаження). Перша ступінь і утримує некерований блок РД 4, а друга ступінь 2 утримує платформу 5 на якій розташовані управляємі (поворотні) РД 6 з єднанні з рульовими приводами (РП) 7, та відсік системи керування 8. При цьому сумарний вектор тягнення блоку РД б більше сумарного вектора тягнення блоку РД 4. Так, на приклад, якщо по прототипі, коли РД розташовані в донній частині БР, тягнення дорівнює 900000кг., то по заявленому способі тягнення блоці РД дорівнює 400000кг., а тягнення блоку РД 6 дорівнює 500000кг. Це значить, що одна камера блоку 4 при чотирьох РД винне створювати тягнення в 100000кг., і 66666кг., при шести РД, а камера 6 - 125000кг. CM GO CM 7282 Розташування блоку РД 6 у головній частині БР, а також та обставина, що сумарний вектор тягнення блоку РД 6 більше сумарного вектора тягнення блоку РД 4 забезпечує СТІЙКІСТЬ польоту БР на активній частині траєкторії Це пояснюється тім, що сумарний вектор тягнення який складається з сумарних векторів тягнення блоків РД 4 і 6 розташованих вище центра ваг БР Та обставина, що блок РД 6 являється керованим, забезпечує стабілізацію польоту БР на активній частині при ЗМІНІ початкових розумів (вигоранні палива) та дії ЗОВНІШНІХ збурень Природно, що при старті БР РД блоків 4 і 6 працюють одночасно Це створює в польоті за рахунок розташування сумарного вектора тягнення вище центра ваги БР тягнучий ефект, прикладений до корпусу БР, що розвантажує поздовжні зусилля, які створюються блоком РД 4 Це дозволяє зменшити товщину стінок БР, що у свою чергу зменшує суху вагу БР При польоті другої ступені положення при якому вектор тягнення розташований вище центра ваги зберігається Треба вказати, що для здійснення стійкого руху об'єкта необхідне виникнення відновлюючої сили яка породжує момент повертаючи об'єкт на задану траєкторію Фіг 3 демонструє відхилення БР від програмної траєкторії на кут гщ дією зовнішнього збурення, де F - сила тягнення , яка прикладена до крапки А платформи 5, G - сила ваг БР прикладена в точці В центра ваг БР, а М в відновлюючий момент ВІДПОВІДНО З теоретичною механікою система, приведена на фіг 3 відповідає фізичному маятнику G=mg (1) де m - маса БР, g — сила земного тяжіння БР ніби підвішена в точці А прикладанн сили тяжіння F ВІДМІННІСТЬ системи фіг 3 від фізичного маятники заключається в тому, що система фіг З, являється рухомою, відповідне рівняння рухові БР, що перебуває під дією сили ваги mg буде мати вид dK =М dt (2) де К - КІЛЬКІСТЬ рухові БР, М - момент КІЛЬКОСТІ рухові Або l6 = -mghsin9 (3) де h - відстань від центра масло точки А підвішування БР, І - момент інерції БР відносно осі А Диференціальне рівняння є нелінійним і при допущенні малих коливань БР відносно продольноі осі руху можна прийняти sin ~ Тоді Є + со§Є = 0 (4) де o)5=mgh/l - квадрат частоти власних коливань БР Якщо прийняти початкові умови t=0, (р)= 0 de(O) . ——- = 0 , то загальний розв язок однорідного диdt ференціального рівняння (4) матиме вигляд = (Cos0t (5) З рівняння (5) можна зробити висновок, що кут в після зникнення збурення відповідає затухаючому процесу з періодом коливань Т (6) Це свідчить про СТІЙКІСТЬ польоту БР Та обставина, що тягнення РД 6 менш ніж в прототипі дозволяє використовувати РП 7 меншої МІЦНОСТІ і природно менших габаритів Відсутність на першій ступені БР фіг 1, системи керування і РП камер згоряння 4 суттєво зменшує вартість першої ступені порівнянне з прототипом Спосіб використовується як в одноступінчатих так і в багатоступінчатих БР Література 1 Конструкція і проектування космічних літальних апаратів М Машинобудування, 1986, с 69 V л.Ф ¥ К ^л о zau 7282 Фіг. 2 Комп'ютерна верстка М. Клюкін Фіг. З Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. Київ - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for setting ballistic rocket in motion
Назва патенту російськоюСпособ придания движения баллистической ракете
МПК / Мітки
МПК: B64D 27/00
Мітки: спосіб, ракети, створення, балістичний, руху
Код посилання
<a href="https://ua.patents.su/4-7282-sposib-stvorennya-rukhu-balistichnijj-raketi.html" target="_blank" rel="follow" title="База патентів України">Спосіб створення руху балістичній ракеті</a>
Спосіб гідродинамічного руху і керування судном
Номер патенту: 58013
Опубліковано: 15.07.2003
Автор: Гречко Микола Пилипович
МПК: B63H 11/00
Мітки: керування, спосіб, гідродинамічного, судном, руху
Формула / Реферат:
Спосіб гідродинамічного руху і керування судном, що включає перетворення енергії первинного двигуна за допомогою насоса і сопла в кінетичну енергію струменя рідини, який відрізняється тим, що за допомогою сопла направляють струмінь з високою швидкістю в нерухомий криволінійний канал, що плавно змінюючи напрямок руху струменя на кут не більший за 180°, перетворює відцентрові сили струменя, що діють на увігнуту стінку каналу, у силу рушійну...
Спосіб визначення стану руху в замкнутій інерціальній системі відліку та пристрій для його здійснення

Номер патенту: 24656
Опубліковано: 04.08.1998
Автор: Годованець Любомир Юрійович
МПК: G01P 3/64
Мітки: інерціальній, визначення, системі, здійснення, руху, відліку, пристрій, стану, спосіб, замкнутий
Формула / Реферат:
1. Спосіб визначення стану руху в замкнутій інерціальній системі відліку, що включає подачу джерелом світла пристрою світлового променя, спрямованого на непрозоре дзеркало, яке відбиває його під прямим кутом відносно до падаючого променя з наступним спостереженням положення променя в окулярі, який відрізняється тим, що в вихідному положенні пристрою, коли напрям світлового променя від джерела світла спрямовано в напрямі вектора швидкості руху...
Спосіб реактивного руху
Номер патенту: 12582
Опубліковано: 11.10.1999
Автор: Синельник Анатолій Іванович
Мітки: руху, реактивного, спосіб
Формула / Реферат:
Спосіб реактивного руху з зовнішним робочим тілом, при якому робоче тіло за допомогою рушія всмоктують, здійснюють над ним роботу і відкидають у напрямку, протилежному всмоктуванню, який відрізняється тим, що як зовнішнє робоче тіло застосовують вакуум.
Пристрій для керування електроприводом і швидкістю руху акумуляторного рудникового електровоза

Номер патенту: 60932
Опубліковано: 15.10.2003
Автори: Коваленко Павло Михайлович, Кирил Джустров, Іван Стоілов, Калус Костянтин Якович, Гураль Василь Володимирович, Мєнта Мєнтєшєв
МПК: B60L 15/20
Мітки: керування, електроприводом, руху, електровоза, пристрій, рудникового, швидкістю, акумуляторного
Формула / Реферат:
1. Пристрій для керування електроприводом і швидкістю руху акумуляторного рудникового електровоза, що містить акумуляторну батарею, до виходу якої підключені елементи кола тягових двигунів, датчик напруги акумуляторної батареї, датчики швидкості тягових двигунів, який відрізняється тим, що у коло тягових двигунів додатково, через автоматичний роз'єднувач, вхід якого з'єднаний з виходом акумуляторної батареї, та головний контактор, підключені...
Пристрій для регулювання дорожнього руху
Номер патенту: 44478
Опубліковано: 15.02.2002
Автори: Пономарчук Анатолій Федосійович, Потребчук Анатолій Володимирович, Пономарчук Ігор Анатолійович, Коломійцев Петро Семенович
МПК: G08G 1/09
Мітки: пристрій, руху, регулювання, дорожнього
Формула / Реферат:
1. Пристрій для регулювання дорожнього руху, що містить блок керування та блок світлових сигналів, з трьох вертикально розташованих секцій червоної, у верхній частині блока, жовтої, у середній та зеленої у нижній частині блока, який відрізняється тим, що освітлення секцій виконано у вигляді окремих світлових елементів у формі концентричних кіл, секторів, смуг або іншої конфігурації.2. Пристрій за п. 1, який відрізняється тим, що...
Попередній патент: Схват маніпулятора
Наступний патент: Заглушка-пломба для вентиля газового балона
Випадковий патент: Пристрій для керування електричними розрядами при електроерозійному диспергуванні металів