Схват маніпулятора
Номер патенту: 7281
Опубліковано: 15.06.2005
Автори: Савенко Юрій Миколайович, Захаренко Анатолій Олександрович, Карпачов Юрій Андрійович, Сміт Крейг Ф., Роуланд Марк Стефан

Формула / Реферат
1. Схват маніпулятора, що містить корпус, привід переміщення охвата, привід обертання схвата і затискні губки, кінематично зв'язані з приводами, який відрізняється тим, що додатково він споряджений додатковими затискними губками, виконаними пружними, як і основні затискні губки, і в нижній частині жорстко зчленованими з ними, причому привід переміщення схвата сполучений з черв'яком, який знаходиться в зачепленні з двома черв'ячними секторами, осі яких зв'язані окремо кожна з поворотними кронштейнами, жорстко з'єднаними з відповідними основними і додатковими губками і через осі взаємодіючими з корпусом, при цьому корпус зв'язаний із приводом обертання схвата, на валу якого встановлена шестірня, що знаходиться в зачепленні з зубчастим колесом, насадженим на стакан, жорстко розташований у корпусі.
2. Схват маніпулятора за п. 1, який відрізняється тим, що кожна з додаткових затискних губок споряджена у верхній частині підпружиненим захватом, що самовстановлюється відносно неї й об'єкта схоплювання за допомогою шарнірного з'єднання.
3. Схват маніпулятора за п. 1, який відрізняється тим, що додаткові затискні губки мають твердість, меншу, ніж твердість основних затискних губок.
4. Схват маніпулятора за п. 1, який відрізняється тим, що приводи переміщення й обертання схвата й елементи кінематичного зв'язку розміщені в герметизованому корпусі.
Текст
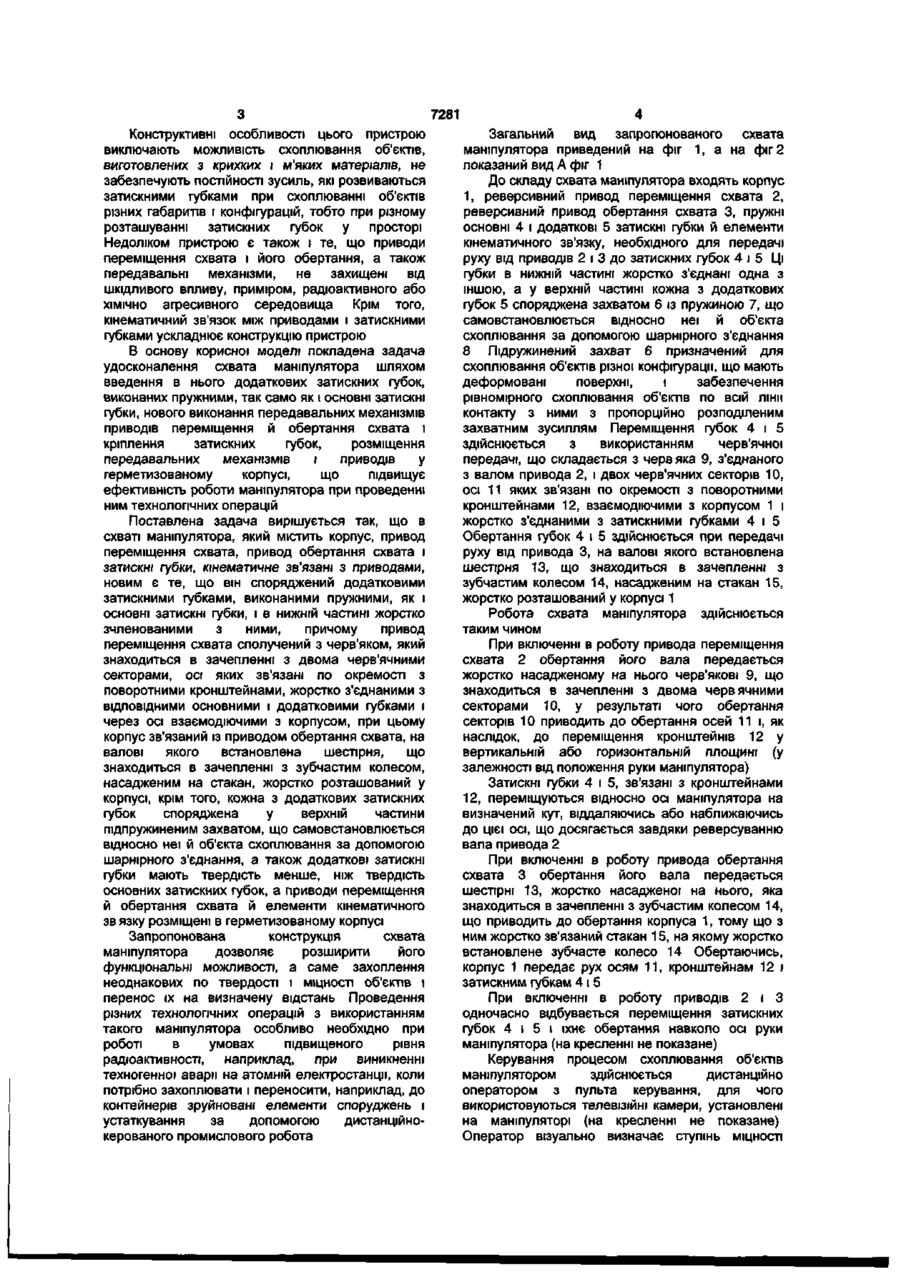
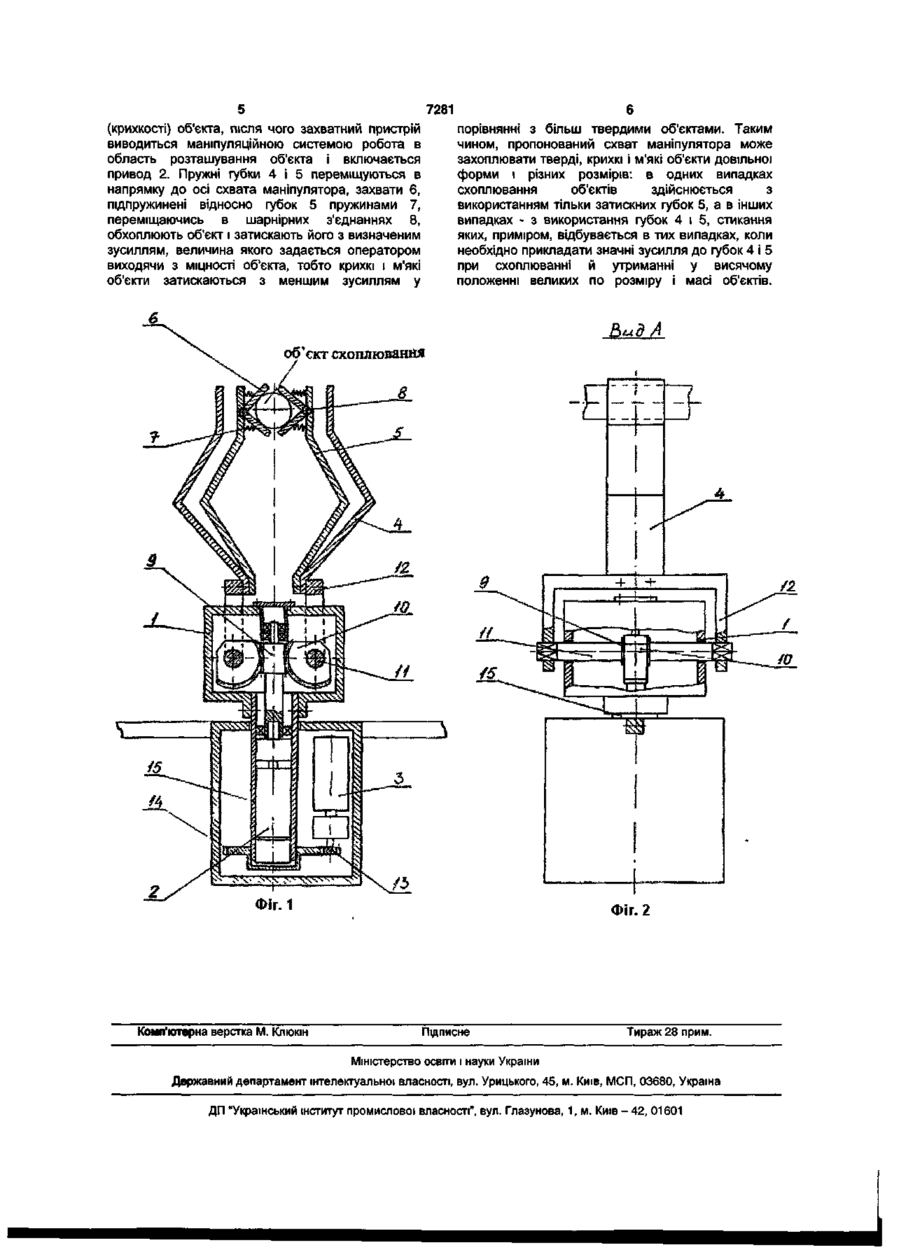
1. Схват маніпулятора, що містить корпус, привід переміщення охвата, привід обертання схвата і затискні губки, кінематично зв'язані з приводами, який відрізняється тим, що додатково він споряджений додатковими затискними губками, виконаними пружними, як і основні затискні губки, і в нижній частині жорстко зчленованими з ними, причому привід переміщення схвата сполучений з черв'яком, який знаходиться в зачепленні з двома черв'ячними секторами, осі яких зв'язані окремо кожна з поворотними кронштейнами, жорстко з'єднаними з відповідними основними і додатковими губками і через осі взаємодіючими з корпусом, при цьому корпус зв'язаний із приводом обертання схвата, на валу якого встановлена шестірня, що знаходиться в зачепленні з зубчастим колесом, насадженим на стакан, жорстко розташований у корпусі. 2. Схват маніпулятора за п. 1, який відрізняється тим, що кожна з додаткових затискних губок споряджена у верхній частині підпружиненим захватом, що самовстановлюється відносно неї й об'єкта схоплювання за допомогою шарнірного з'єднання. 3. Схват маніпулятора за п. 1, який відрізняється тим, що додаткові затискні губки мають твердість, меншу, ніж твердість основних затискних губок. 4. Схват маніпулятора за п. 1, який відрізняється тим, що приводи переміщення й обертання схвата й елементи кінематичного зв'язку розміщені в герметизованому корпусі. Корисна модель відноситься до галузі машинобудування і може використовуватися у промислових роботах, зокрема - дистанційнокерованих роботах при їхній роботі в місцях, небезпечних для здоров'я людини, наприклад, при техногенних аваріях на атомних електростанціях. Відомі універсальні захоплюючі пристрої промислових роботів ["Детали и механизмы роботов. Основы расчета, конструирования и технологии производства" - под ред. Б. Б. Самотокина. Киев, "Выща школа", 1990 г., с.56 59, рис. 2.29, а, в, г], які містять багатоланковий кінематичний ланцюг і тросові передачі для стискання і розтискання її ланок, або постачені еластичне охоплюючими затискними елементами, заповненими стисненим повітрям або електрореологічною або електромагнітною рідиною. Недоліком конструкції пристрою з кінематичним ланцюгом є те, що в ньому використовуються тросові передачі, наявність яких знижує його надійність, і крім того, конструктивні особливості кінематичного ланцюга сприяють виникненню дискретних точок дотику її ланок з поверхнею захоплюваного об'єкта, що веде до концентрації навантажень на окремих ділянках цієї поверхні і, як наслідок, не дозволяє застосовувати цю конструкцію при захопленні нежорстких і крихких об'єктів. Використання конструкцій пристроїв зі стисненим повітрям і еластично-охоплюючими затискними елементами вирішує проблему захоплення таких об'єктів, однак наявність у цих пристроях електрореологічної або електромагнітної рідини, а також використання стиснутого повітря, значно ускладнює конструкцію пристроїв і їхню експлуатацію і знижує надійність їхньої роботи. Найбільш близьким по технічній суті до пристрою, який заявляється, є пристрій [патент України №51347 "Схват маніпулятора", кл. B25J 15/00, 2002р., бюл. №11], який складається з корпуса, привода переміщення схвата, привода обертання схвата, затискних губок і передавальних механізмів, які кінематичне зв'язують їх із приводами. 00 04 О) 7281 Конструктивні особливості цього пристрою виключають можливість схоплювання об'єктів, виготовлених з крихких і м'яких матеріал/в, не забезпечують ПОСТІЙНОСТІ зусиль, які розвиваються затискними губками при схоплюванні об'єктів різних габаритів і конфігурацій, тобто при різному розташуванні затискних губок у просторі Недоліком пристрою є також і те, що приводи переміщення схвата і його обертання, а також передавальні механізми, не захищені від шкідливого впливу, приміром, радіоактивного або ХІМІЧНО агресивного середовища Крім того, кінематичний зв'язок між приводами і затискними губками ускладнює конструкцію пристрою В основу корисної моделі покладена задача удосконалення схвата маніпулятора шляхом введення в нього додаткових затискних губок, виконаних пружними, так само як і основні затискні губки, нового виконання передавальних механізмів приводів переміщення й обертання схвата і кріплення затискних губок, розміщення передавальних механізмів і приводів у герметизованому корпусі, що підвищує ефективність роботи маніпулятора при проведенні ним технологічних операцій Поставлена задача вирішується так, що в схваті маніпулятора, який містить корпус, привод переміщення схвата, привод обертання схвата і затискні губки, кінематичне зв'язані з приводами, новим є те, що він споряджений додатковими затискними губками, виконаними пружними, як і основні затискні губки, і в нижній частині жорстко зчленованими з ними, причому привод переміщення схвата сполучений з черв'яком, який знаходиться в зачепленні з двома черв'ячними секторами, осі яких зв'язані по окремості з поворотними кронштейнами, жорстко з'єднаними з ВІДПОВІДНИМИ основними і додатковими губками і через осі взаємодіючими з корпусом, при цьому корпус зв'язаний із приводом обертання схвата, на валові якого встановлена шестірня, що знаходиться в зачепленні з зубчастим колесом, насадженим на стакан, жорстко розташований у корпусі, крім того, кожна з додаткових затискних губок споряджена у верхній частини підпружиненим захватом, що самовстановлюється відносно неї й об'єкта схоплювання за допомогою шарнірного з'єднання, а також додаткові затискні губки мають твердість менше, ніж твердість основних затискних губок, а приводи переміщення й обертання схвата й елементи кінематичного зв язку розміщені в герметизованому корпусі Запропонована конструкція схвата маніпулятора дозволяє розширити його функціональні можливості, а саме захоплення неоднакових по твердості і МІЦНОСТІ об'єктів і перенос їх на визначену відстань Проведення різних технологічних операцій з використанням такого маніпулятора особливо необхідно при роботі в умовах підвищеного рівня радіоактивності, наприклад, при виникненні техногенної аварії на атомній електростанції, коли потрібно захоплювати і переносити, наприклад, до контейнерів зруйновані елементи споруджень і устаткування за допомогою дистанційнокерованого промислового робота Загальний вид запропонованого схвата маніпулятора приведений на фіг 1, а на фіг 2 показаний вид А фіг 1 До складу схвата маніпулятора входять корпус 1, реверсивний привод переміщення схвата 2, реверсивний привод обертання схвата 3, пружні основні 4 і додаткові 5 затискні губки й елементи кінематичного зв'язку, необхідного для передачі руху від приводів 2 і 3 до затискних губок 4 і 5 Ці губки в нижній частині жорстко з'єднані одна з іншою, а у верхній частині кожна з додаткових губок 5 споряджена захватом 6 із пружиною 7, що самовстановлюється відносно неї й об'єкта схоплювання за допомогою шарнірного з'єднання 8 Підружинений захват 6 призначений для схоплювання об'єктів різної конфігурації, що мають деформовані поверхні, і забезпечення рівномірного схоплювання об'єктів по всій лінії контакту з ними з пропорційно розподіленим захватним зусиллям Переміщення губок 4 і 5 здійснюється з використанням черв'ячної передачі, що складається з черв яка 9, з'єднаного з валом привода 2, і двох черв'ячних секторів 10, осі 11 яких зв'язані по окремості з поворотними кронштейнами 12, взаємодіючими з корпусом 1 і жорстко з'єднаними з затискними губками 4 і 5 Обертання губок 4 і 5 здійснюється при передачі руху від привода 3, на валові якого встановлена шестірня 13, що знаходиться в зачепленні з зубчастим колесом 14, насадженим на стакан 15, жорстко розташований у корпусі 1 Робота схвата маніпулятора здійснюється таким чином При включенні в роботу привода переміщення схвата 2 обертання його вала передається жорстко насадженому на нього черв'якові 9, що знаходиться в зачепленні з двома черв ячними секторами 10, у результаті чого обертання секторів 10 приводить до обертання осей 11 і, як наслідок, до переміщення кронштейнів 12 у вертикальній або горизонтальній площині (у залежності від положення руки маніпулятора) Затискні губки 4 і 5, зв'язані з кронштейнами 12, переміщуються відносно осі маніпулятора на визначений кут, віддаляючись або наближаючись до цієї осі, що досягається завдяки реверсуванню вала привода 2 При включенні в роботу привода обертання схвата 3 обертання його вала передається шестірні 13, жорстко насадженої на нього, яка знаходиться в зачепленні з зубчастим колесом 14, що приводить до обертання корпуса 1, тому що з ним жорстко зв'язаний стакан 15, на якому жорстко встановлене зубчасте колесо 14 Обертаючись, корпус 1 передає рух осям 11, кронштейнам 12 і затискним губкам 4 і 5 При включенні в роботу приводів 2 і З одночасно відбувається переміщення затискних губок 4 і 5 і їхнє обертання навколо осі руки маніпулятора (на кресленні не показане) Керування процесом схоплювання об'єктів маніпулятором здійснюється дистанційно оператором з пульта керування, для чого використовуються телевізійні камери, установлені на маніпуляторі (на кресленні не показане) Оператор візуально визначає ступінь МІЦНОСТІ 7281 (крихкості) об'єкта, після чого захватний пристрій виводиться маніпуляційною системою робота в область розташування об'єкта і включається привод 2. Пружні губки 4 і 5 переміщуються в напрямку до осі схвата маніпулятора, захвати 6, підпружинені відносно губок 5 пружинами 7, переміщаючись в шарнірних з'єднаннях 8, обхоплюють об'єкт і затискають його з визначеним зусиллям, величина якого задається оператором виходячи з міцності об'єкта, тобто крихкі і м'які об'єкти затискаються з меншим зусиллям у порівнянні з більш твердими об'єктами. Таким чином, пропонований схват маніпулятора може захоплювати тверді, крихкі і м'які об'єкти довільної форми і різних розмірів: в одних випадках схоплювання об'єктів здійснюється з використанням тільки затискних губок 5, а в інших випадках - з використання губок 4 і 5, стикання яких, приміром, відбувається в тих випадках, коли необхідно прикладати значні зусилля до губок 4 і 5 при схоплюванні й утриманні у висячому положенні великих по розміру і масі об'єктів. Вид А о6"скт схоплювання Фіг. 1 Комп'ютерна верстка М. Клюкін Фіг. 2 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. Київ - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюManipulator holder
Автори англійськоюKarpachov Yurii Andriiovych, Savenko Yurii Mykolaiovych, Rowland Mark Stefan, Smith Crage F., Zakharenko Anatolii Oleksandrovych
Назва патенту російськоюСхват манипулятора
Автори російськоюКарпачев Юрий Андреевич, Савенко Юрий Николаевич, Роуланд Марк Стефан, Смит Крейг Ф., Захаренко Анатолий Александрович
МПК / Мітки
МПК: B25J 15/00
Мітки: схват, маніпулятора
Код посилання
<a href="https://ua.patents.su/4-7281-skhvat-manipulyatora.html" target="_blank" rel="follow" title="База патентів України">Схват маніпулятора</a>
Схват маніпулятора

Номер патенту: 51347
Опубліковано: 15.11.2002
Автори: Гусев Олексій Володимирович, Рудик Юрій Микитович, Карпачов Юрій Андрійович, Березнюк Володимир Володимирович
МПК: B25J 15/00
Мітки: маніпулятора, схват
Формула / Реферат:
Схват маніпулятора, що містить корпус, привід переміщення схвата, зв'язані з ним через гвинтову пару і передатний механізм затискні губки, який відрізняється тим, що на валу приводу переміщення схвата закріплена шестірня його передатного механізму, що знаходиться в зачепленні з зубчастим колесом, усередині якого співвісно з ним встановлені гайка гвинтової пари і гвинт, зв'язаний з корпусом з можливістю зворотно-поступального руху гвинта,...
Схват маніпулятора
Номер патенту: 35903
Опубліковано: 16.04.2001
Автори: Романець Тарас Петрович, Драпак Георгій Мефодійович
МПК: B25J 15/06
Мітки: схват, маніпулятора
Формула / Реферат:
Схват маніпулятора, який містить корпус, присмоктувані, упор та коромисло з'єднане з упором відрізняється тим, що присмоктувані приєднані до повзунів, які нерухомо закріплені на пружному коромислі з можливістю зміни їх положення і розташовані на штангах що жорстко приєднані до корпусу, а жорсткий упор встановлено на пружному коромислі з можливістю зміни його висоти і положення, і оснащено плоскою площиною розташованою паралельно повзунам з...
Вакуумний схват

Номер патенту: 33533
Опубліковано: 15.02.2001
Автори: Драпак Георгій Мефодійович, Романець Тарас Петрович
МПК: B25J 15/06
Текст:
...як деталі 16 досягнуть присмок тувачів 11 обох пневмокамер, тиск в пневмокамерах 9 і 10 знімається, і сильфони 13 під дією пружних сил розтискаються. При цьому присмоктувачі 11 захоплюють верхню деталь стопи. Після чого схва т починає рухатись догори, а блок штанг 5, 6 (фіг. 3) повертається в шарнірі 2 за годинниковою стрілкою у бік більшого плеча "В" штанг 5, 6. При цьому відбувається відгинання догори краю захопленої присмоктувачами 11...
Підкладочний килимок до комп’ютерного маніпулятора типу “миша”
Номер патенту: 1141
Опубліковано: 15.01.2002
Автор: Кравцов Сергій Георгійович
МПК: G06T 11/80, G06F 3/033
Мітки: комп'ютерного, миша, типу, підкладочний, маніпулятора, килимок
Формула / Реферат:
Підкладочний килимок до комп'ютерного маніпулятора типу "миша", що має площинну форму, який відрізняється тим, що матеріалом для його виготовлення є пробкова прескомпозиція на основі кори пробкового дуба.
Захват маніпулятора

Номер патенту: 7396
Опубліковано: 29.09.1995
Автори: Марченко Володимир Петрович, Ткаченко Іван Павлович, Брязкало Вадим Вадимович, Цейтлін Генріх Юхимович
МПК: B25J 15/00, A21C 15/00
Мітки: захват, маніпулятора
Формула / Реферат:
Захват манипулятора, преимущественно для пирожных, содержащий захватные головки, смонтированные посредством штанг на шарнирно-рычажном механизме и имеющие привод для изменения расстояния между ними, отличающийся тем, что, с целью повышения надежности работы, каждая захватная головка содержит пару двуплечих рычагов, закрепленных на соответствующей штанге шарнирно-рычажного механизма, при этом захватные головки снабжены общим приводом для...