Пневматичний датчик переміщення седача
Формула / Реферат
Пневматичний датчик переміщення, що містить живильний вузол у вигляді живильного сопла, підключеного до джерела стабілізованого живлення стисненим повітрям, і відповідний вузол, установлений з можливістю опозитного переміщення і підключений до вихідного перетворювача, який відрізняється тим, що відповідний вузол містить два приймальних канали з віссю симетрії, які сходяться на його торці, а вихід живильного сопла зміщений щодо зазначеної осі симетрії й утворює з нею кут:
![]() ,
,
де ![]() - кут між віссю виходу живильного сопла і віссю симетрії приймальних каналів;
- кут між віссю виходу живильного сопла і віссю симетрії приймальних каналів;
![]() - зсув осі виходу живильного сопла щодо осі симетрії приймальних каналів;
- зсув осі виходу живильного сопла щодо осі симетрії приймальних каналів;
![]() - базова відстань між живильним і відповідним вузлами,
- базова відстань між живильним і відповідним вузлами,
причому вихідний перетворювачвиконаний диференціальним.
Текст
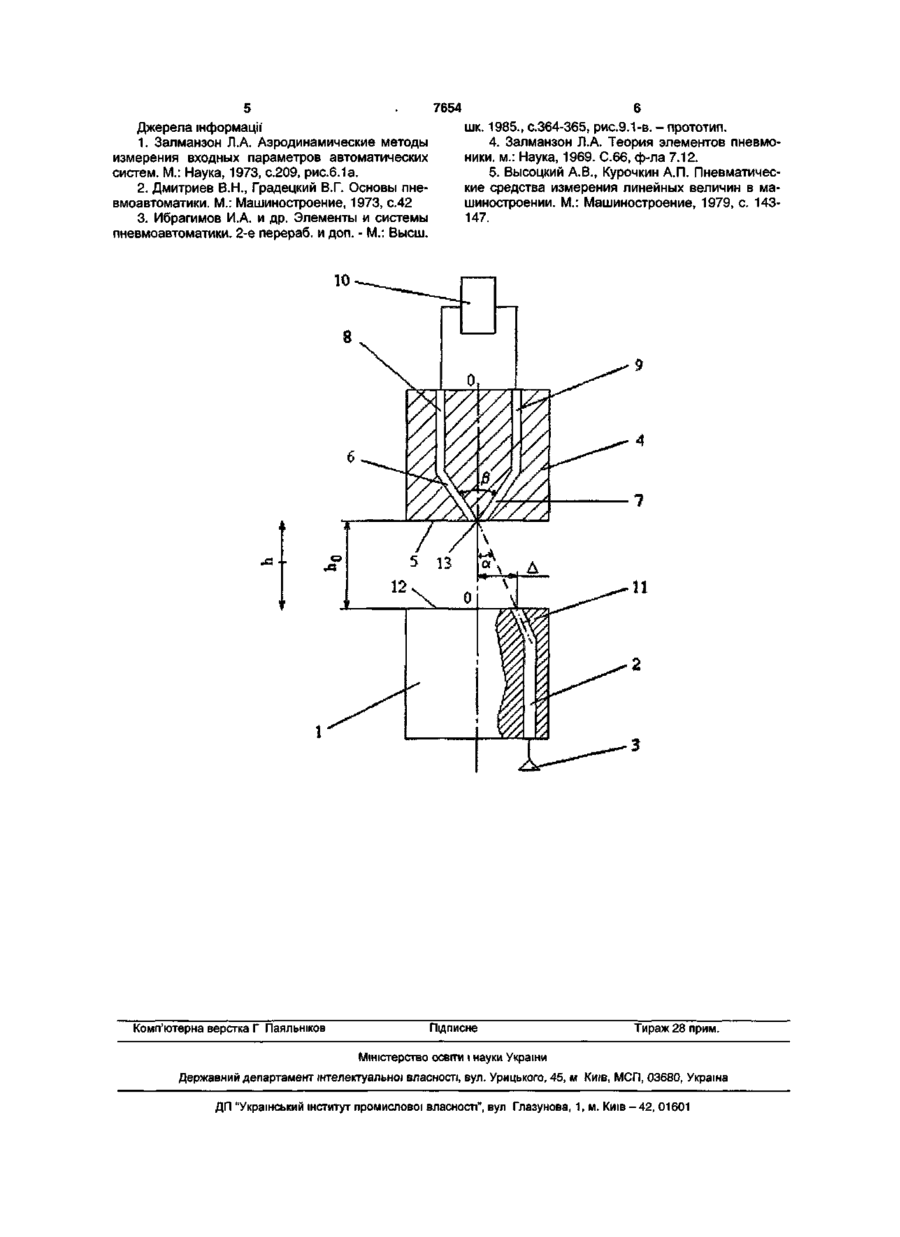
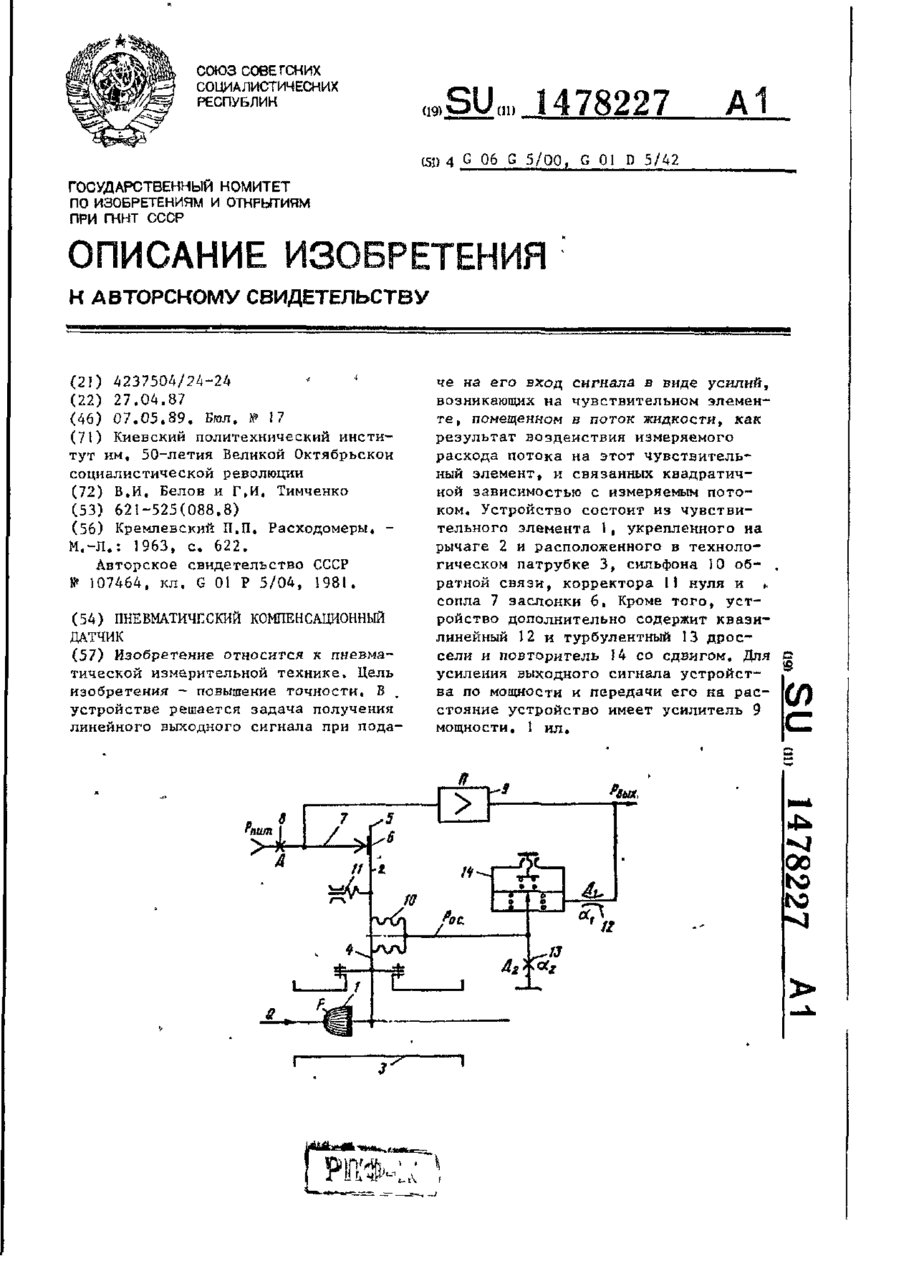
Пневматичний датчик переміщення, що містить живильний вузол у вигляді живильного сопла, підключеного до джерела стабілізованого живлення стисненим повітрям, і відповідний вузол, установлений з можливістю опозитного переміщення і підключений до вихідного перетворювача, який відрізняється тим, що відповідний вузол містить два приймальних канали з віссю симетрії, які схо Корисна модель відноситься до вимірювальної техніки і може бути використана для контролю взаємного положення, відстані й опозитного переміщення об'єктів один щодо одного. Відомий пневматичний датчик для виміру переміщення [1], що містить живильний вузол, виконаний у вигляді живильного сопла, і відповідний вузол, виконаний у вигляді заслінки. Недоліком цього датчика є дуже малий діапазон виміру, тому що максимально можливе опозитне переміщення відповідного вузла щодо живильного вузла складає 25% від діаметра живильного сопла [2,3]. Найбільш близьким до пневматичного датчика, що заявляється, по технічній сутності й ефекту, що досягається, є пневматичний датчик переміщення [2], що містить живильний і прийомний вузли, встановлені з можливістю оппозитного переміщення, причому живильний вузол виконаний у вигляді живильного сопла, зв'язаного з джерелом стабілізованого живлення стисненим повітрям, а відповідний вузол містить прийомний канал, виконаний осесиметрично живильному соплу, і підключений до вихідного перетворювача. Основним недоліком цього датчика є низька чутливість при опозитному переміщенні вузлів один щодо одного, особливо в міру збільшення відстані між ними [3]. Крім цього, у відомому пнев дяться на його торці, а вихід живильного сопла зміщений щодо зазначеної осі симетрії й утворює з нею кут: п =arctg(A/h0), де а - кут між віссю виходу живильного сопла і віссю симетрії приймальних каналів; А - зсув осі виходу живильного сопла щодо осі симетрії приймальних каналів; h 0 - базова відстань між живильним і відповідним вузлами, причому вихідний перетворювач виконаний диференціальним. матичному датчику відсутня нульова точка відліку, що утрудняє користування їм і обмежує область застосування, наприклад, не дозволяє здійснювати базування вузлів устаткування. Задачею корисної моделі є збільшення діапазону виміру за рахунок істотного перерозподілу тисків у приймальних каналах відповідного вузла. Рішення поставленої задачі досягається тим, що відповідний вузол містить два приймальних канала з віссю симетрії, що сходяться на його торці, а вихід живильного сопла зміщений щодо зазначеної осі симетрії й утворює з нею кут a = arctg(A/h 0 ) де а - кут між віссю виходу живильного сопла і віссю симетрії приймальних каналів; А - зсув осі виходу живильного сопла щодо осі симетрії приймальних каналів; ho - базова відстань між живильним і відповідним вузлами, причому вихідний перетворювач виконаний диференціальним. Сутність корисної моделі полягає в тім, що пневматичний датчик переміщення, що заявляється, заснований на істотно новому принципі роботи. Якщо у відомому датчику зміна тиску в приймальному каналі і, відповідно, вихідному перетворювачі, відбувається тільки в результаті зміни відстані h між живильним і відповідним вузлами і визнача (0 ST 7654 ється лише параметрами вільного турбулентного затопленого струменя повітря, то в запропонованому датчику зміна h приводить до переміщення точки перетинання осі виходу живильного сопла з віссю симетрії приймальних каналів відповідного вузла, що забезпечує істотний перерозподіл тисків у приймальних каналах відповідного вузла й у диференціальному вихідному перетворювачі. Таким чином, у пневматичному датчику переміщення, що заявляється, забезпечується працездатність при значно більших значеннях h і з достатнім коефіцієнтом підсилення, що залежить від раціонального вибору параметрів п о > а ' Д ) щ 0 істотно збільшує діапазон його вимірів. Крім цього, наявність фіксованої базової відстані між вузлами ho і відповідного їй нульового показання вихідного перетворювача дозволяє використовувати датчик, що заявляється, для рішення задач базування вузлів устаткування. Порівняльний аналіз із прототипом показує, що пневматичний датчик переміщення Седача, що заявляється, відрізняється тим, що відповідний вузол містить два приймальних канала з віссю симетрії, що сходяться на його торці, а вихід живильного сопла зміщений щодо зазначеної осі симетрії й утворює з нею кут cc = arctg(A/h 0 ) де а - кут між віссю виходу живильного сопла і віссю симетрії приймальних каналів; А - зсув осі виходу живильного сопла щодо осі симетрії приймальних каналів; ho - базова відстань між живильним і відповідним вузлами, причому вихідний перетворювач виконаний диференціальним. Таким чином, пневматичний датчик положення Седача, що заявляється, відповідає критерію винаходу "новизна". Порівняння рішення, що заявляється, не тільки з прототипом, але і з іншими технічними рішеннями в даній галузі техніки не дозволило виявити в них ознаки, що відрізняють рішення, що заявляється, від прототипу, що дозволяє зробити висновок про відповідність критерію "істотні відмінності". Сутність корисної моделі пояснюється кресленням, де представлена принципова схема пневматичного датчика переміщення Седача, що заявляється. Пневматичний датчик переміщення містить виконане в корпусі живильного вузла 1 живильне сопло 2, підключене до джерела стабілізованого живлення стисненим повітрям 3, а також приймальний вузол 4, установлений з можливістю опозитного переміщення, який містіть два збігаючих під кутом Р на його торці 5 приймальних канала 6, 7, симетричних щодо осі 0-0. Виходи 8, 9 зазначених каналів підключені до диференціального вихідного перетворювача 10. Вихід 11 живильного сопла 2 виконаний на торці 12 живильного вузла 1 і зміщений на величину А від осі 0-0, утворюючи з нею кут а . Пневматичний датчик переміщення Седача працює наступним чином. 1. Базове встановлення датчика. Виконується відповідно до вимог технологічного процесу і від повідає вихідній відстані ° між торцями 5, 12 живильного і відповідного вузлів 1, 4. Після подачі тиску живлення від джерела 3 на виході 11 живильного сопла 2 формується вільний затоплений струмінь повітря [1-4], що натікає на торець 5 відповідного вузла 4, роздвоюється на розділовій перегородці 13 між прийомними каналами 6, 7 і створює в них два потоки однакового рівня тиску. При цьому на виходах 8, 9 також створюються рівні тиски і диференціальний вихідний перетворювач 10 установлюється на "нуль", що відповідає заданій базовій відстані ho. 2. Робота датчика. Оппозитное переміщення живильного і відповідного вузлів 1, 4 друг щодо друга приводить до зміни вимірюваної відстані h і зсуву точки перетинання осі виходу 11 живильного струменя з розділовою перегородкою 13 відповідного вузла 4. Величина цього зсуву о може бути обчислена по формулі ±5 = i h t g a _ причому знак вказує напрямок переміщення. При цьому відбувається перерозподіл потоків робочого середовища в приймальних каналах 6, 7 і поява відповідного перепаду тисків на виходах 8, 9, що і реєструє диференціальний вихідний перетворювач 10, одночасно показуючи напрямок переміщення ( збільшення чи зменшення h). 3. Практична реалізація. Датчик містить живильний і приймальний вузли, що можуть бути виконані у вигляді окремих вузлів, а також вбудовуватися в блоки, чи вузли і деталі устаткування. Діаметри живильного сопла і приймальних каналів вибирають у традиційному для пневмоавтоматики діапазоні 0,5 - 2,0мм [5]. Діапазон базових відстаней ho при рівні тиску живлення до 0,2МПа складає 5-20мм. Як вихідний перетворювач 10 зручно використовувати диференціальний рідиний манометр. Діапазон зсуву виходу живильного сопла А складає 1,0-10,0мм. Нижня межа зсуву визначається вимогами технології виготовлення датчика і його працездатності, а верхня - припустимими розмірами живильного вузла і заданим діапазоном виміру. Кут a при заданому h 0 і обраному значенні А обчислюється по залежності a = a r c t g ( A / h 0 ) j щ 0 заявляється. При цьому варто враховувати, що для малих значень ho потрібний більший кут і навпаки. Крім цього, чим більше кут а , тим вище чутливість датчика, і навпаки. Для приведених вище діапазонів параметрів h 0 , А можна приймати 3 ° < а
ДивитисяДодаткова інформація
Назва патенту англійськоюPneumatic displacement transducer proposed by sedach v.v.
Назва патенту російськоюПневматический датчик перемещения, предложенный седачем в.в.
МПК / Мітки
МПК: G01B 13/00
Мітки: переміщення, седача, пневматичний, датчик
Код посилання
<a href="https://ua.patents.su/4-7654-pnevmatichnijj-datchik-peremishhennya-sedacha.html" target="_blank" rel="follow" title="База патентів України">Пневматичний датчик переміщення седача</a>
Пневматичний компенсаційний датчик
Номер патенту: 5150
Опубліковано: 28.12.1994
Автори: Бєлов Вячеслав Іванович, Тімченко Григорій Іванович
Мітки: пневматичний, компенсаційний, датчик
Формула / Реферат:
Пневматический компенсационный датчик, содержащий чувствительный элемент, расположенный в технологическом патрубке, и измеритель, состоящий из выводного рычага, одно плечо которого связано с чувствительным эдементом, а на другом плече расподожена заслонка сопла, подключенного через дроссель к каналу питания и через усилитель - к выходному каналу, а также из корректора нуля и сильфона обратной связи, скрепленных с другим плечом рычага,...
Пневматичний датчик лінійної щільності волокнистого матеріалу

Номер патенту: 48628
Опубліковано: 15.08.2002
Автори: Нарченко Віталій Кузьмич, Кльонов Олександр Володимирович, Якимчук Радій Палладійович
МПК: D01H 13/00
Мітки: датчик, щільності, волокнистого, матеріалу, лінійної, пневматичний
Формула / Реферат:
Пневматичний датчик лінійної щільності волокнистого матеріалу, що складається з корпуса, який має вхідну лійку, вимірювальної камери і вивідного каналу надлишкового тиску, який відрізняється тим, що вимірювальна камера має тороїдальну форму, виконана з еластичного матеріалу, наприклад гуми, містить канал виводу надлишкового тиску і з'єднана з вхідною лійкою за допомогою рухливої шайби.
Датчик тяги в топковому агрегаті
Номер патенту: 632
Опубліковано: 15.12.1993
Автор: Дуденко Віктор Тихонович
МПК: F23N 5/02
Мітки: агрегаті, датчик, топковому, тяги
Формула / Реферат:
Формула изобретенияДатчик тяги в топочном агрегате, содержащий корпус с соплом и биметаллический диск, отличающийся тем, что, с целью повышения точности настройки, в стенке корпуса выполнена резьба и диск укреплен в нем на этой резьбе с возможностью перемещения.
Спосіб визначення швидкості і напрямку переміщення гостряка стрілкового переводу
Номер патенту: 70560
Опубліковано: 15.10.2004
Автор: Парфьонов Володимир Іванович
МПК: B61L 7/00
Мітки: стрілкового, переміщення, переводу, гостряка, напрямку, визначення, швидкості, спосіб
Формула / Реферат:
Спосіб визначення швидкості і напрямку переміщення гостряка стрілкового переводу, при якому лінійне переміщення гостряка перетворюють в обертове барабана з віссю, на якій закріплений генератор постійного струму, який відрізняється тим, що швидкість переміщення гостряка визначають по амплітудному значенню виробленої генератором напруги, при цьому величину швидкості переміщення приймають пропорційною амплітуді миттєвої напруги, а напрямок...
Механізм переміщення секцій кріплення та конвеєра
Номер патенту: 39518
Опубліковано: 15.04.2004
Автори: Косарєв Іван Васильович, Вассерман Ігор Григорович, Андрєєв Георгій Володимирович, Косарєв Василь Васильович, Лаптєв Анатолій Григорович, Овчаренко Валерій Анатолійович
МПК: E21D 23/08
Мітки: кріплення, секцій, механізм, переміщення, конвеєра
Формула / Реферат:
Механізм переміщення секцій кріплення та конвеєра, що складається з гідродомкрата пересування, з’єднаного з секцією кріплення, та штовхача, на якому за допомогою осі, перпендикулярної площині шару лави, шарнірно закріплена ланка з виконаним у ній одним подовжнім пазом, з’єднаним за допомогою осі з конвеєром, який відрізняється тим, що ланка обладнана принаймні двома заплечиками, розташованими з обох сторін відносно осі симетрії ланки на її...
Попередній патент: Спосіб одержання сухого пивоварного солоду покращеної якості при зменшених витратах тепла та електроенергії
Наступний патент: Спосіб виробництва біологічно-активної добавки “гемовітал”
Випадковий патент: Блок незнімної опалубки новікова