Пристрій автоматичного захисту молотильного апарата і силової установки зернозбирального комбайна
Номер патенту: 76801
Опубліковано: 15.09.2006
Автори: Макаров Сергій Миколайович, Шамановський Олександр Дмитрович, Шляховер Віктор Якович, Шляховер Сергій Вікторович, Митрофанов Олександр Петрович, Качан Володимир Тимофійович, Шамановський Анатолій Дмитрович, Буряченко Володимир Іванович
Формула / Реферат
Пристрій автоматичного захисту молотильного апарата і силової установки зернозбирального комбайна, що містить датчик частоти обертання вала, який відрізняється тим, що датчик частоти обертання вала встановлено на валу силової установки, додатково встановлено датчик частоти обертання коліс моста та датчик частоти обертання вала робочого органа, наприклад вітрорешітної системи очищення або соломовідокремлюючого пристрою, причому всі датчики підключені до логічного пристрою через блоки наявності і блоки порівняння, виконавчий механізм і сигналізуючий пристрій, а у логічному пристрої блок наявності сигналу від датчика частоти обертання коліс з'єднано із блоком наявності сигналу від датчика частоти обертання робочого органа, що з'єднаний із блоком порівняння фактичної частоти обертання вала силової установки з номінальною частотою, що, у свою чергу, з'єднаний із блоком порівняння фактичної частоти обертання вала силової установки з заданою граничною частотою, який з'єднаний із блоком порівняння фактичної частоти вала силової установки з мінімально припустимою частотою, при цьому останній зв'язаний з блоком включення сигналізуючого пристрою та блоком включення виконавчого механізму.
Текст
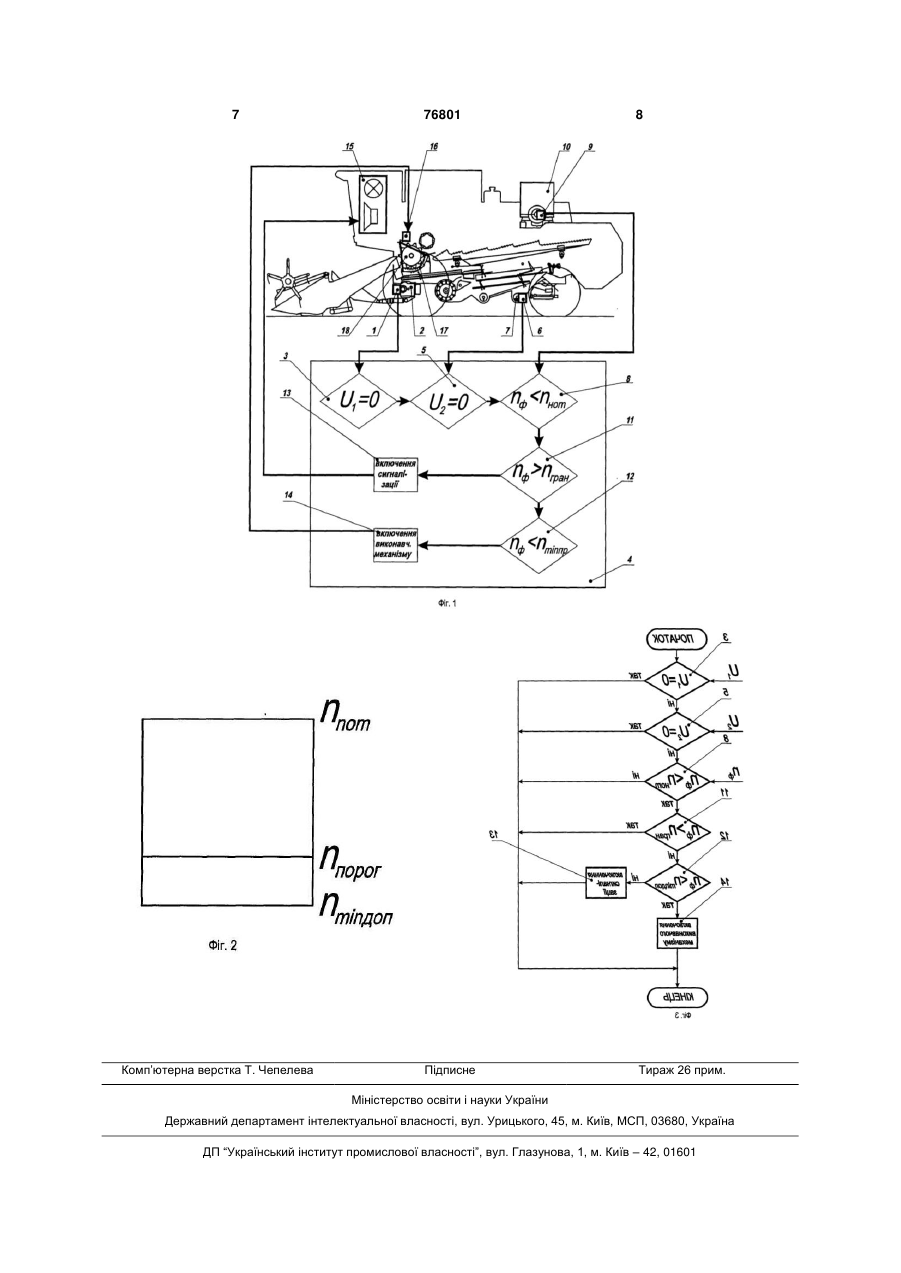
Пристрій автоматичного захисту молотильного апарата і силової установки зернозбирального комбайна, що містить датчик частоти обертання вала, який відрізняється тим, що датчик частоти C2 2 (19) 1 3 76801 4 барабаном і підбарабанням. Визначення силової установки як базового Крім того, контролювання обертів молотильнопристрою для оцінки стабільності протікання техго барабана при збиранні різних сільськогосподарнологічного процесу відділення зерна на молотиських культур вимагає технологічного переналагольному апараті зв'язане з тим, що молотильний дження рівня спрацьовування перемикача апарат споживає більш 50% вироблюваною силограничного елемента внаслідок зміни встановлевою установкою потужності при повному технолоної частоти обертання молотильного барабана від гічному процесі. Падіння частоти обертання вала 500хв-1 до 1200хв-1. силової установки нижче мінімально припустимих В основу винаходу поставлена задача ствосвідчить про процес забивання простору між морення пристрою, що сигналізує комбайнерові про лотильним барабаном і підбарабанням. Для запоможливість заклинювання молотильного апарата і бігання повного забивання простору між молотисилової установки комбайна, забезпечує максимальним барабаном та підбарабанням необхідно льний зазор між молотильним барабаном і підбашвидке забезпечення максимального зазору між рабанням для запобігання заклинювання , моломолотильним барабаном і підбарабанням через тильного апарата і силової установки комбайна виконавчий механізм. При цьому, жмут технологіпри обробці комбайном різних сільськогосподарсьчної маси, що утворився в початковий момент заких культур, причому, з появою помилкових кобивання, не заклинює молотильний апарат і силоманд, у випадку санкціонованого припинення техву установку комбайна, а іде через нологічного процесу зернозбиральним комбайном, соломовідокремлюючий апарат за межі технологізапобігає своє включення. чного тракту зернозбирального комбайна. Поставлена задача досягається тим, що в На Фіг.1 представлена структурна схема припристрої автоматичного захисту молотильного строю автоматичного захисту молотильного апаапарата і силової установки зернозбирального рата і силової установки зернозбирального комкомбайна, що містить датчик частоти обертання байна; вала силової установки, датчик частоти обертання на Фіг.2 - схема частот обертання вала силоколіс моста, датчик частоти обертання вала робової установки; чого органа, наприклад, вітрорешітної системи на Фіг.3 - блок-схема програми логічного приочищення або соломовідокремлюючого пристрою, строю. підключені до логічного пристрою через блоки наПристрій автоматичного захисту молотильного явності і блоки порівняння, виконавчий механізм і апарата і силової установки зернозбирального сигналізуючий пристрій, відповідно до винаходу, в комбайна містить датчик 1 частоти обертання кологічному пристрої блок наявності сигналу від датліс моста 2, вихід якого з'єднаний із входом блоку чика частоти обертання коліс з'єднано із блоком наявності сигналу 3 логічного пристрою 4. Вихід наявності сигналу від датчика частоти обертання блоку наявності сигналу 3 з'єднаний із входом робочого органа, що з'єднаний із блоком порівнянблоку наявності сигналу 5 логічного пристрою 4, а ня фактичної частоти обертання вала силової другий вхід блоку наявності сигналу 5 з'єднаний з установки з номінальною частотою, що, у свою виходом датчика 6 частоти обертання робочого чергу, з'єднаний із блоком порівняння фактичної органа 7. Вихід блоку наявності сигналу 5 з'єдначастоти обертання вала силової установки з заданий із входом блоку порівняння 8 фактичної частоною граничною частотою, який з'єднаний із блоком ти обертання вала силової установки ηψ з. номіпорівняння фактичної частоти вала силової устанальною частотою nном логічного пристрою 4, а новки з мінімально припустимою частотою, при другий вхід блоку порівняння 8 з'єднаний з вихоцьому останній зв'язаний з блоком включення сигдом датчика 9 частоти обертання вала силової налізуючого пристрою та блоком включення викоустановки 10. Вихід блоку порівняння 8 з'єднаний навчого механізму. із входом блоку порівняння 11 фактичної частоти Блок наявності сигналу від датчика частоти обертання вала силової установки nф із заданою обертання коліс запобігає включенню пристрою граничною частотою nгран логічного пристрою 4. при санкціонованому припиненні переміщення Вихід блоку порівняння 11 з'єднаний із входом комбайна, з'єднання з блоком наявності сигналу блоку порівняння 12 фактичної частоти обертання від датчика частоти обертання робочого органа вала силової установки nф з мінімально припустизапобігає включенню пристрою при санкціонованій мою частотою nmin пр логічного пристрою 4, один зупинці робочих органів комбайна. вихід якого підключений до блоку включення сигБлок порівняння фактичної частоти обертання налізуючого пристрою 13 логічного пристрою 4, а вала силової установки з номінальною частотою інший до входу блоку включення виконавчого меразом із блоком порівняння фактичної частоти ханізму 14 логічного пристрою 4. Вихід блоку обертання вала силової установки з заданою гравключення сигналізуючого пристрою 13 підключеничною частотою запобігає включенню пристрою ний до входу сигналізуючого пристрою 15, а вихід при падінні фактичної частоти обертання вала блоку включення виконавчого механізму 14 підксилової установки нижче номінальної, але вище лючений до входу виконавчого механізму 16, вихід заданої граничної. Блок порівняння фактичної часякого зв'язаний з підбарабанням 17. Над підбаратоти вала силової установки з мінімально припусбанням 17 встановлено молотильний барабан тимою частотою вмикає блок включення сигналі18. зуючого пристрою, при частоті більшої мінімально Логічний пристрій 4 виконує цикл опитування припустимої, але меншій граничної або пускає в датчиків 1, 6, 9 через заданий інтервал часу й хід блок включення виконавчого механізму при аналізує їх згідно алгоритму. частоті меншій мінімально припустимої. Пристрій працює в такий спосіб. 5 76801 6 Перед початком роботи комбайнер виставляє nф, менше nгран, (ні) - комбайн переміщується, техзазор між молотильним барабаном 18 і підбаранологічний тракт комбайна працює, оберти силобанням 17 на необхідну величину. вої установки 10 входять у зону, близьку до критиПри запуску силової установки 10 зернозбирачної: льного комбайна починає працювати логічний - алгоритм включає блок 12, що одержує сигпристрій 4 і включає блок 3, що одержує сигнал від нал від датчика 9 частоти обертання вала силової датчика 1 частоти обертання коліс моста 2, що установки 10, обумовлений як nф, що обробляєтьобробляється за наступною схемою: ся за наступною схемою: - рівень сигналу на датчику 1 U1 дорівнює 0 - рівень сигналу на датчику 9, обумовлений як (так) - комбайн не переміщується: nф, більше nmin пр, (ні) - комбайн переміщається, - алгоритм припиняє свою роботу - підбаратехнологічний тракт комбайна працює, силова бання 17 залишається на місці, через встановлеустановка 10 ще працює в припустимому режимі, ний час у логічному пристрої 4 алгоритм повторюале оберти силової установки 10 знаходяться в ється знову; зоні, близької до критичної: - рівень сигналу на датчику 1 U1 більше 0 (ні) - алгоритм включає блок 13, що включає сигкомбайн переміщується: налізацію 15; при включенні сигналізації комбай- алгоритм включає блок 5, що одержує сигнал нер повинний знизити поступальну швидкість певід датчика 6 частоти обертання робочого органа реміщення комбайна, що зменшить завантаження 7, що обробляється за наступною схемою: технологічного тракту, а отже зменшить кількість. - рівень сигналу на датчику 6 U2 дорівнює 0 технологічного продукту, який проходить через (так) - комбайн переміщується, технологічний зазор між молотильним барабаном 17 і підбаратракт комбайна не працює: банням 18, що приведе до зниження спожитої по- алгоритм припиняє свою роботу - підбаратужності і відновить обороти силової установки бання 17 залишається на місці, через встановлевище nгран; ний час у логічному пристрої 4 алгоритм повторю- алгоритм припиняє свою роботу - підбарається знову; бання 17 залишається на місці, через встановле- рівень сигналу на датчику 6 U2 більше 0 (ні)ний час у логічному пристрої 4 алгоритм повторюкомбайн переміщується, технологічний тракт комється знову; байна працює: - рівень сигналу на датчику 9, обумовлений як - алгоритм включає блок 8, що одержує сигнал nф, менше nmin пр, (так) - комбайн переміщується, від датчика 9 частоти обертання вала силової технологічний тракт комбайна працює, обороти установки 10, що обробляється за наступною схесилової установки ввійшли в критичну зону - нижче мою: мінімально припустимих; зниження поступальної - рівень сигналу на датчику 9, обумовлений як швидкості переміщення комбайна не привело до nф, дорівнює або більше nном, (ні) - комбайн перезменшення завантаження молотильного апарата, міщується, технологічний тракт комбайна працює, а отже технологічний продукт, який проходить чесилова установка 10 працює в номінальному ререз зазор між молотильним барабаном 18 і підбажимі: рабанням 17 набивається у вищевказаний зазор, - алгоритм припиняє свою роботу - підбаращо може привести до виходу з ладу молотильного бання 17 залишається на місці, через встановлеапарата вцілому і заклинюванню силової установний час у логічному пристрої 4 алгоритм повторюки 10: ється знову; - алгоритм включає блок 14, що пускає в хід - рівень сигналу на датчику 9, обумовлений як виконавчий механізм 16, що переводить підбараnф, менше nном, (так) - комбайн переміщується, бання 17 у крайнє нижнє положення; жмут ущільтехнологічний тракт комбайна працює, силова неної маси технологічного продукту, що утворився, установка 10 починає втрачати оберти: викидається молотильним барабаном 18 з моло- алгоритм включає блок 11, що одержує сигтильного апарата, споживана молотильним апаранал від датчика 9 частоти обертання вала силової том потужність знижується до номінальної, відпоустановки 10, обумовлений як nф, що обробляєтьвідно і частота обертів силової установки 10 nф ся за наступною схемою: попадає у зону від nгран і вище; - рівень сигналу на датчику 9, обумовлений як - алгоритм припиняє свою роботу - підбараnф, більше nгран, (так) - комбайн , переміщується, бання 17 знаходиться в опущеному стані, через технологічний тракт комбайна працює, силова встановлений час у логічному пристрої 4 алгоритм установка 10 ще працює в припустимому режимі: повторюється знову; після виходу ущільненої маси - алгоритм припиняє свою роботу - підбаратехнологічного продукту за межі молотильного бання 17 залишається на місці, через встановлеапарата 18 комбайнер виставляє зазор між молоний час у логічному пристрої 4 алгоритм повторютильним барабаном 18 і підбарабанням 17 на неється знову; обхідну величину. - рівень сигналу на датчику 9, обумовлений як 7 Комп’ютерна верстка Т. Чепелева 76801 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for automated protection of a thresher and a power unit of a grain harvester
Автори англійськоюBuriachenko Volodymyr Ivanovych, Kachan Volodymyr Tymofiiovych, Mytrofanov Oleksandr Petrovych, Shamanovskyi Anatolii Dmytrovych, Shamanovskyi Oleksandr Dmytrovych, Shliakhover Viktor Yakovych, Shliakhover Serhii Viktorovych
Назва патенту російськоюУстройство автоматической защиты молотильного аппарата и силовой установки зерноуборочного комбайна
Автори російськоюБуряченко Владимир Иванович, Качан Владимир Тимофеевич, Митрофанов Александр Петрович, Шамановский Анатолий Дмитриевич, Шамановский Александр Дмитриевич, Шляховер Виктор Яковлевич, Шляховер Сергей Викторович
МПК / Мітки
МПК: G05B 11/01, A01F 12/18
Мітки: молотильного, автоматичного, пристрій, апарата, комбайна, зернозбирального, установки, силової, захисту
Код посилання
<a href="https://ua.patents.su/4-76801-pristrijj-avtomatichnogo-zakhistu-molotilnogo-aparata-i-silovo-ustanovki-zernozbiralnogo-kombajjna.html" target="_blank" rel="follow" title="База патентів України">Пристрій автоматичного захисту молотильного апарата і силової установки зернозбирального комбайна</a>
Система автоматичного керування, контролю та реєстрації параметрів силової установки літального апарата
Номер патенту: 48884
Опубліковано: 15.02.2005
Автори: БЕЗСЧАСТНИЙ Василь Олексійович, Безсчастний Микола Олексійович
МПК: F02C 9/28
Мітки: система, установки, реєстрації, контролю, керування, автоматичного, літального, силової, параметрів, апарата
Формула / Реферат:
Группа изобретений относится к области получения энергии за счет естественных факторов. Энергокомплекс имеет воздушную тяговую гелиоприемную трубу в виде трубопровода, проложенного по горному образованию. В трубе установлена первая ветротурбина. Выход трубы расположен на уровне холодного атмосферного воздуха. Секция подогрева насыщенного парами воды воздушного потока расположена на входе трубы возле подножия горы. На конечном участке трубы...
Пристрій для автоматичного завантаження зернозбирального комбайна хлібною масою
Номер патенту: 7179
Опубліковано: 15.06.2005
Автори: Абашина Марина Олександрівна, Кондратець Василь Олександрович
МПК: A01D 75/00
Мітки: завантаження, автоматичного, масою, хлібною, пристрій, комбайна, зернозбирального
Формула / Реферат:
1. Пристрій для автоматичного завантаження зернозбирального комбайна хлібною масою, що містить важільний первинний перетворювач товщини шару хлібної маси в нахиленій камері, вторинний перетворювач кута повороту вала первинного перетворювача та механізм передачі дії золотника гідропідсилювача керування ходом машини, який відрізняється тим, що вторинний перетворювач кута повороту вала первинного перетворювача виконаний електричним, на його...
Система контролю та реєстрації параметрів силової установки літального апарата
Номер патенту: 31643
Опубліковано: 15.07.2002
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: G06F 15/16, F02C 9/28
Мітки: реєстрації, літального, контролю, апарата, система, силової, установки, параметрів
Формула / Реферат:
Система контролю та реєстрації параметрів силової установки літального апарата, яка містить блок обчислювача, послідовно з’єднані блок нормалізаторів, комутатор, аналого-цифровий перетворювач, перший операційний блок виходами з’єднаний з блоком обчислювача та комутатором, яка відрізняється тим, що в систему додатково введені два блоки формувачів, два перетворювачі частота-код, другий комутатор, два шинних формувачі, два блоки автоматичного...
Система контролю та реєстрації параметрів силової установки літального апарата
Номер патенту: 59128
Опубліковано: 15.07.2005
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28, G06F 15/00
Мітки: силової, параметрів, реєстрації, літального, апарата, установки, контролю, система
Формула / Реферат:
Напій лікеро-горілчаний, що включає водно-спиртову рідину з спирту етилового ректифікованого і води питної підготовленої, цукровий сироп 65,8 %-ний, кислоту лимонну, морс з ягід дикоростучої сировини, який відрізняється тим, що додатково містить ароматизатор "Клюква" з вмістом барвника "BELL FLAVORS FRAGRANCES GmbH" та бензоат натрію, взятих у відповідному співвідношенні інгредієнтів на 1000 дал напою: ...
Система контролю та реєстрації параметрів силової установки літального апарата
Номер патенту: 54605
Опубліковано: 17.03.2003
Автори: БЕЗСЧАСТНИЙ Василь Олексійович, Дробінов Вадим Павлович, Ісак Омелян Гаврилович
МПК: F02C 9/28, G06F 15/16
Мітки: апарата, установки, контролю, літального, параметрів, реєстрації, система, силової
Формула / Реферат:
Система контролю та реєстрації параметрів силової установки літального апарата, яка має блок нормалізаторів, першим виходом через послідовно з'єднані комутатор, аналого-цифровий перетворювач та операційний блок з'єднаний з першим входом блока обчислювача, другий вихід блока нормалізаторів через блок контролю датчиків з'єднаний з шинним формувачем та блоком автоматичного керування, другий вхід якого з'єднаний з третім виходом блока...
Попередній патент: Система фільтрації для захисту від біологічних агентів та з’єднувальний елемент для використання в цій системі
Наступний патент: Фармацевтичний препарат водорозчинних проліків пропофолу на водній основі (варіанти)
Випадковий патент: Спосіб добування магнітосприйнятливих мінералів з морського піску та пристрій для його здійснення