Пристрій для вимірювання кутової швидкості
Формула / Реферат
Пристрій для вимірювання кутової швидкості, який містить насадку, жорстко закріплену на тілі обертання, для якого вимірюється кутова швидкість, і обчислювальний пристрій, який відрізняється тим, що насадка виконана у формі кола, площина якого перпендикулярна осі обертання тіла обертання, причому на поверхню насадки нанесена мітка у вигляді відрізка прямої лінії, а як обчислювальний пристрій використаний процесор цифрової обробки відеозображень, що виконує лінійну апроксимацію відеозображення мітки, введено пристрій формування цифрових відеозображень, вхід якого оптично пов’язаний з насадкою, а його вихід підключено до входу процесора цифрової обробки відеозображень.
Текст
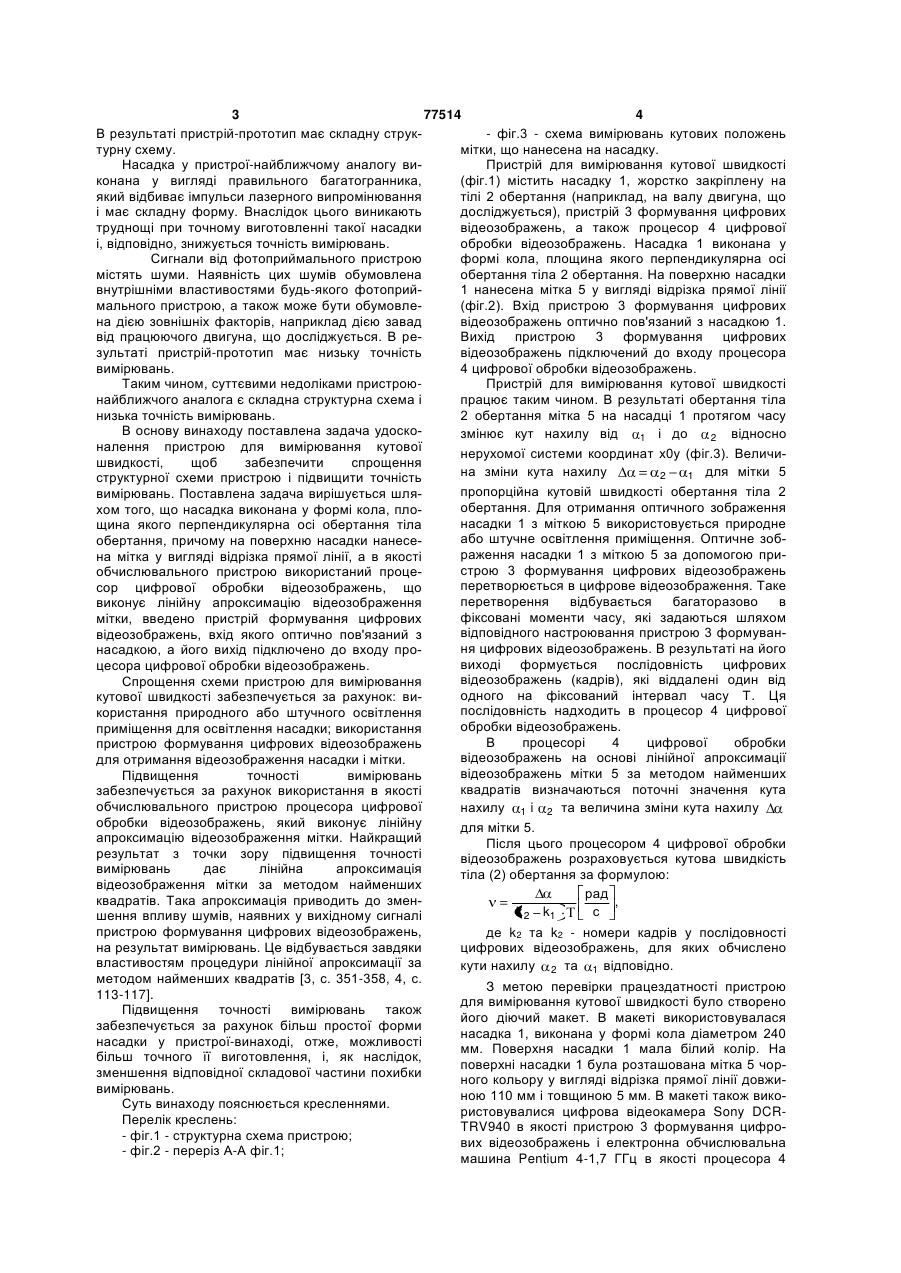
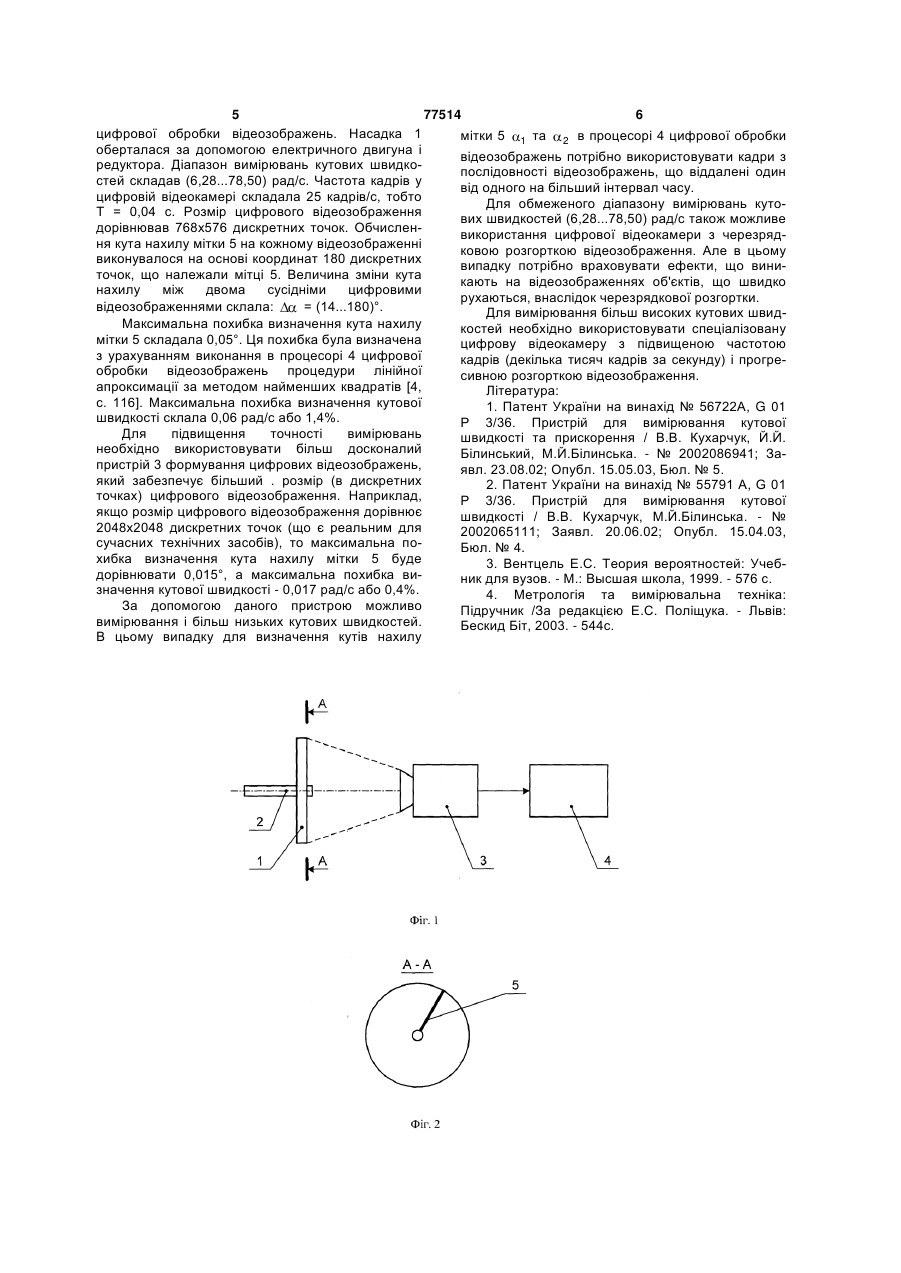
Пристрій для вимірювання кутової швидкості, який містить насадку, жорстко закріплену на тілі обертання, для якого вимірюється кутова швидкість, і обчислювальний пристрій, який відрізняється тим, що насадка виконана у формі кола, площина якого перпендикулярна осі обертання тіла обертання, причому на поверхню насадки нанесена мітка у вигляді відрізка прямої лінії, а як обчислювальний пристрій використаний процесор цифрової обробки відеозображень, що виконує лінійну апроксимацію відеозображення мітки, введено пристрій формування цифрових відеозображень, вхід якого оптично пов’язаний з насадкою, а його вихід підключено до входу процесора цифрової обробки відеозображень. Винахід належить до галузі вимірювальної техніки і може бути використаний для визначення кутової швидкості різних тіл обертання, в тому числі - для визначення кутової швидкості обертання валів двигунів. Відомий пристрій для вимірювання кутової швидкості [1]. Як і пристрій-винахід, він містить насадку, жорстко закріплену на тілі обертання, для якого вимірюється кутова швидкість, і обчислювальний пристрій. Проте, на відміну від пристрою-винаходу, в цьому пристрої для освітлення насадки використовується спеціальний освітлювач (напівпровідниковий лазер). До складу пристрою також входять об'єктив та багатоелементний фотоприймальний пристрій, виконаний у вигляді лінійки світлочутливих елементів. В результаті пристрій для вимірювання кутової швидкості має складну структурну схему. Насадка у відомому пристрої для вимірювання кутової швидкості виконана у вигляді Архімедової спіралі. Форма насадки описується складною функціональною залежністю, внаслідок чого виникають труднощі при точному виготовленні такої насадки і, відповідно, знижується точність вимірювань. Сигнали від фотоприймального пристрою містять шуми. Наявність цих шумів обумовлена внутрішніми властивостями будь-якого фотоприймального пристрою, а також може бути обумовлена дією зовнішніх факторів, наприклад, дією завад від працюючого двигуна, що досліджується. В результаті пристрій для вимірювання кутової швидкості має низьку точність вимірювань. Таким чином, суттєвими недоліками відомого пристрою для вимірювання кутової швидкості є складна структурна схема і низька точність вимірювань. Також відомий пристрій для вимірювання кутової швидкості [2], що обраний за найближчий аналог. Як і пристрій-винахід, пристрій-прототип містить насадку, жорстко закріплену на тілі обертання, для якого вимірюється кутова швидкість, і обчислювальний пристрій. Проте, на відміну від пристрою-винаходу, у пристрої-найближчому аналозі для освітлення насадки використовується спеціальний освітлювач (лазер із заданим періодом випромінювання). До складу пристрою також входять об'єктив та багатоелементний фотоприймальний пристрій, виконаний у вигляді матриці світлочутливих елементів. (19) UA (11) 77514 (13) C2 (21) 20041008814 (22) 28.10.2004 (24) 15.12.2006 (46) 15.12.2006, Бюл. № 12, 2006 р. (72) Подчашинський Юрій Олександрович (73) ЖИТОМИРСЬКИЙ ДЕРЖАВНИЙ ТЕХНОЛОГІЧНИЙ УНІВЕРСИТЕТ (56) UA 55791, 15.04.2003 UA 56722, 15.05.2003 JP 7140844, 02.06.1995 JP 63052066, 05.03.1988 SU 1631437, 28.02.1991 SU 1323961, 15.07.1987 US 5678144, 14.10.1997 3 77514 4 В результаті пристрій-прототип має складну струк- фіг.3 - схема вимірювань кутових положень турну схему. мітки, що нанесена на насадку. Насадка у пристрої-найближчому аналогу виПристрій для вимірювання кутової швидкості конана у вигляді правильного багатогранника, (фіг.1) містить насадку 1, жорстко закріплену на який відбиває імпульси лазерного випромінювання тілі 2 обертання (наприклад, на валу двигуна, що і має складну форму. Внаслідок цього виникають досліджується), пристрій 3 формування цифрових труднощі при точному виготовленні такої насадки відеозображень, а також процесор 4 цифрової і, відповідно, знижується точність вимірювань. обробки відеозображень. Насадка 1 виконана у Сигнали від фотоприймального пристрою формі кола, площина якого перпендикулярна осі містять шуми. Наявність цих шумів обумовлена обертання тіла 2 обертання. На поверхню насадки внутрішніми властивостями будь-якого фотоприй1 нанесена мітка 5 у вигляді відрізка прямої лінії мального пристрою, а також може бути обумовле(фіг.2). Вхід пристрою 3 формування цифрових на дією зовнішніх факторів, наприклад дією завад відеозображень оптично пов'язаний з насадкою 1. від працюючого двигуна, що досліджується. В реВихід пристрою 3 формування цифрових зультаті пристрій-прототип має низьку точність відеозображень підключений до входу процесора вимірювань. 4 цифрової обробки відеозображень. Таким чином, суттєвими недоліками пристроюПристрій для вимірювання кутової швидкості найближчого аналога є складна структурна схема і працює таким чином. В результаті обертання тіла низька точність вимірювань. 2 обертання мітка 5 на насадці 1 протягом часу В основу винаходу поставлена задача удоскозмінює кут нахилу від 1 і до 2 відносно налення пристрою для вимірювання кутової нерухомої системи координат х0у (фіг.3). Величишвидкості, щоб забезпечити спрощення на зміни кута нахилу 2 1 для мітки 5 структурної схеми пристрою і підвищити точність пропорційна кутовій швидкості обертання тіла 2 вимірювань. Поставлена задача вирішується шляобертання. Для отримання оптичного зображення хом того, що насадка виконана у формі кола, плонасадки 1 з міткою 5 використовується природне щина якого перпендикулярна осі обертання тіла або штучне освітлення приміщення. Оптичне зобобертання, причому на поверхню насадки нанесераження насадки 1 з міткою 5 за допомогою прина мітка у вигляді відрізка прямої лінії, а в якості строю 3 формування цифрових відеозображень обчислювального пристрою використаний процеперетворюється в цифрове відеозображення. Таке сор цифрової обробки відеозображень, що перетворення відбувається багаторазово в виконує лінійну апроксимацію відеозображення фіксовані моменти часу, які задаються шляхом мітки, введено пристрій формування цифрових відповідного настроювання пристрою 3 формуванвідеозображень, вхід якого оптично пов'язаний з ня цифрових відеозображень. В результаті на його насадкою, а його вихід підключено до входу провиході формується послідовність цифрових цесора цифрової обробки відеозображень. відеозображень (кадрів), які віддалені один від Спрощення схеми пристрою для вимірювання одного на фіксований інтервал часу Т. Ця кутової швидкості забезпечується за рахунок: випослідовність надходить в процесор 4 цифрової користання природного або штучного освітлення обробки відеозображень. приміщення для освітлення насадки; використання В процесорі 4 цифрової обробки пристрою формування цифрових відеозображень відеозображень на основі лінійної апроксимації для отримання відеозображення насадки і мітки. відеозображень мітки 5 за методом найменших Підвищення точності вимірювань квадратів визначаються поточні значення кута забезпечується за рахунок використання в якості обчислювального пристрою процесора цифрової нахилу 1 i 2 та величина зміни кута нахилу обробки відеозображень, який виконує лінійну для мітки 5. апроксимацію відеозображення мітки. Найкращий Після цього процесором 4 цифрової обробки результат з точки зору підвищення точності відеозображень розраховується кутова швидкість вимірювань дає лінійна апроксимація тіла (2) обертання за формулою: відеозображення мітки за методом найменших рад квадратів. Така апроксимація приводить до змен, k 2 k1 с шення впливу шумів, наявних у вихідному сигналі пристрою формування цифрових відеозображень, де k2 та k2 - номери кадрів у послідовності на результат вимірювань. Це відбувається завдяки цифрових відеозображень, для яких обчислено властивостям процедури лінійної апроксимації за кути нахилу 2 та 1 відповідно. методом найменших квадратів [3, с. 351-358, 4, с. З метою перевірки працездатності пристрою 113-117]. для вимірювання кутової швидкості було створено Підвищення точності вимірювань також його діючий макет. В макеті використовувалася забезпечується за рахунок більш простої форми насадка 1, виконана у формі кола діаметром 240 насадки у пристрої-винаході, отже, можливості мм. Поверхня насадки 1 мала білий колір. На більш точного її виготовлення, і, як наслідок, поверхні насадки 1 була розташована мітка 5 чорзменшення відповідної складової частини похибки ного кольору у вигляді відрізка прямої лінії довживимірювань. ною 110 мм і товщиною 5 мм. В макеті також викоСуть винаходу пояснюється кресленнями. ристовувалися цифрова відеокамера Sony DCRПерелік креслень: TRV940 в якості пристрою 3 формування цифро- фіг.1 - структурна схема пристрою; вих відеозображень і електронна обчислювальна - фіг.2 - переріз А-А фіг.1; машина Pentium 4-1,7 ГГц в якості процесора 4 5 77514 6 цифрової обробки відеозображень. Насадка 1 мітки 5 1 та 2 в процесорі 4 цифрової обробки оберталася за допомогою електричного двигуна і відеозображень потрібно використовувати кадри з редуктора. Діапазон вимірювань кутових швидкопослідовності відеозображень, що віддалені один стей складав (6,28...78,50) рад/с. Частота кадрів у від одного на більший інтервал часу. цифровій відеокамері складала 25 кадрів/с, тобто Для обмеженого діапазону вимірювань кутоТ = 0,04 с. Розмір цифрового відеозображення вих швидкостей (6,28...78,50) рад/с також можливе дорівнював 768х576 дискретних точок. Обчисленвикористання цифрової відеокамери з черезрядня кута нахилу мітки 5 на кожному відеозображенні ковою розгорткою відеозображення. Але в цьому виконувалося на основі координат 180 дискретних випадку потрібно враховувати ефекти, що виниточок, що належали мітці 5. Величина зміни кута кають на відеозображеннях об'єктів, що швидко нахилу між двома сусідніми цифровими рухаються, внаслідок черезрядкової розгортки. відеозображеннями склала: = (14...180)°. Для вимірювання більш високих кутових швидМаксимальна похибка визначення кута нахилу костей необхідно використовувати спеціалізовану мітки 5 складала 0,05°. Ця похибка була визначена цифрову відеокамеру з підвищеною частотою з урахуванням виконання в процесорі 4 цифрової кадрів (декілька тисяч кадрів за секунду) і прогреобробки відеозображень процедури лінійної сивною розгорткою відеозображення. апроксимації за методом найменших квадратів [4, Література: с. 116]. Максимальна похибка визначення кутової 1. Патент України на винахід № 56722А, G 01 швидкості склала 0,06 рад/с або 1,4%. Р 3/36. Пристрій для вимірювання кутової Для підвищення точності вимірювань швидкості та прискорення / В.В. Кухарчук, Й.Й. необхідно використовувати більш досконалий Білинський, М.Й.Білинська. - № 2002086941; Запристрій 3 формування цифрових відеозображень, явл. 23.08.02; Опубл. 15.05.03, Бюл. № 5. який забезпечує більший . розмір (в дискретних 2. Патент України на винахід № 55791 А, G 01 точках) цифрового відеозображення. Наприклад, Р 3/36. Пристрій для вимірювання кутової якщо розмір цифрового відеозображення дорівнює швидкості / В.В. Кухарчук, М.Й.Білинська. - № 2048х2048 дискретних точок (що є реальним для 2002065111; Заявл. 20.06.02; Опубл. 15.04.03, сучасних технічних засобів), то максимальна поБюл. № 4. хибка визначення кута нахилу мітки 5 буде 3. Вентцель Е.С. Теория вероятностей: Учебдорівнювати 0,015°, а максимальна похибка виник для вузов. - М.: Высшая школа, 1999. - 576 с. значення кутової швидкості - 0,017 рад/с або 0,4%. 4. Метрологія та вимірювальна техніка: За допомогою даного пристрою можливо Підручник /За редакцією Е.С. Поліщука. - Львів: вимірювання і більш низьких кутових швидкостей. Бескид Біт, 2003. - 544с. В цьому випадку для визначення кутів нахилу 7 Комп’ютерна верстка М. Клюкін 77514 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measuring angular velocity
Автори англійськоюPodchashynskyi Yurii Oleksandrovych
Назва патенту російськоюУстройство для измерения угловой скорости
Автори російськоюПодчашинский Юрий Александрович
МПК / Мітки
МПК: G01P 3/36
Мітки: пристрій, кутової, вимірювання, швидкості
Код посилання
<a href="https://ua.patents.su/4-77514-pristrijj-dlya-vimiryuvannya-kutovo-shvidkosti.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання кутової швидкості</a>
Пристрій для вимірювання кутової швидкості
Номер патенту: 55791
Опубліковано: 15.04.2003
Автори: Білинська Марина Йосипівна, Кухарчук Василь Васильович
МПК: G01P 3/36
Мітки: кутової, вимірювання, швидкості, пристрій
Формула / Реферат:
Пристрій для вимірювання кутової швидкості, що містить освітлювач, об'єктив, багатоелементний фотоприймальний пристрій, який відрізняється тим, що в нього введена багатогранна насадка на контрольований вал, виконана у вигляді правильного багатогранника, обчислювальний пристрій, при цьому освітлювач виконаний у вигляді імпульсного лазера, а багатоелементний фотоприймальний пристрій виконаний у вигляді матриці світлочутливих елементів, оптичний...
Пристрій для вимірювання кутової швидкості та прискорення
Номер патенту: 56722
Опубліковано: 15.05.2003
Автори: Білинська Марина Йосипівна, Білинський Йосип Йосипович, Кухарчук Василь Васильович
МПК: G01C 19/00, G01P 3/36
Мітки: пристрій, кутової, вимірювання, швидкості, прискорення
Формула / Реферат:
Пристрій для вимірювання кутової швидкості та кутового прискорення, який містить освітлювач, контрольований вал, об'єктив, оптично зв'язаний з входом багатоелементного фотоприймального пристрою, який відрізняється тим, що в нього введена насадка на контрольованому валу, виконана у вигляді Архімедової спіралі, оптично зв'язана з освітлювачем, що являє собою напівпровідниковий лазер, об'єктивом і обчислювальним пристроєм, вхід якого зв'язаний з...
Спосіб та пристрій для вимірювання кутової швидкості
Номер патенту: 61044
Опубліковано: 15.10.2003
Автори: Леоненко Костянтин Миколайович, Шервашидзе Володимир Варламович, Мурзаханов Олександр Валентинович
МПК: G01P 9/00
Мітки: кутової, спосіб, вимірювання, пристрій, швидкості
Формула / Реферат:
1. Спосіб для вимірювання кутової швидкості (), який полягає у тому, що подають керуючий сигнал на блок живлення гіроскопічного датчика кутової швидкості для подачі напруги, необхідної для розкручування гіромотора до його виходу на стаціонарний режим обертання, на виході датчика вимірюють величину напруги при даному напрямку обертання ротора гіромотора (U+), подають...
Спосіб вимірювання кутової швидкості, пристрій для його здійснення та блок обробки диференційних сигналів для пристрою
Номер патенту: 61160
Опубліковано: 17.11.2003
Автори: Васильєв Володимир Леонідович, Гаврилюк Володимир Леонідович, Олексієнко Микола Петрович, Шкляр Володимир Петрович, Гуменюк Володимир Григорович, Шервашидзе Володимир Варлаамович, Леоненко Сергій Миколайович
Мітки: диференційних, пристрій, сигналів, кутової, швидкості, спосіб, пристрою, обробки, вимірювання, здійснення, блок
Формула / Реферат:
1. Спосіб вимірювання кутової швидкості, за яким визначають переміщення чутливого елемента з гіромотором, який розміщують на об'єкті, кутову швидкість якого виміряють, величину переміщення перетворюють в електричний сигнал, на основі якого формують компенсаційу силу, пропорційну кутовій швидкості вказаного об'єкта, і під впливом якої чутливий елемент повертається у зрівноважене положення, по величині якої визначають величину кутової...
Спосіб вимірювання кутової швидкості коріолісовим вібраційним гіроскопом
Номер патенту: 73632
Опубліковано: 15.08.2005
Автори: Яценко Юрій Олексійович, Коваленко Володимир Анатолійович, Чіковані Валерій Валеріанович
МПК: G01P 9/00
Мітки: спосіб, коріолісовим, вимірювання, вібраційним, кутової, гіроскопом, швидкості
Формула / Реферат:
1. Спосіб вимірювання кутової швидкості вібраційним гіроскопом шляхом генерування основної вібраційної хвилі, яка формує опорний сигнал на частоті, близькій або рівній одній з безлічі резонансних мод вібраційної структури, яка містить електроди збудження, електроди управління та інформативні електроди і обертання навколо осі симетрії якої збуджує додаткову вібраційну хвилю, амплітуда якої пропорційна кутовій швидкості обертання або...
Попередній патент: Композиція гліфосату з низьким піноутворенням
Наступний патент: Похідні діазобіциклоалкану з антагоністичною активністю щодо нк1
Випадковий патент: Мобільна система зв'язку