Спосіб інваріантної компенсації впливу зовнішніх збурень та відмов аеродинамічних органів керування літального апарата
Номер патенту: 114011
Опубліковано: 27.02.2017
Автори: Комар Микола Миколайович, Павлов Вадим Володимирович, Павлова Світлана Вадимівна
Формула / Реферат
Спосіб інваріантної компенсації впливу зовнішніх збурень та відмов аеродинамічних органів керування літального апарата, що включає вимірювання величини дії зовнішнього збурення, визначення впливу дії зовнішнього збурення на динаміку польоту, формування сигналу компенсації впливу дії зовнішнього збурення зміною конфігурації аеродинамічного профілю літального апарата, формування сигналу керування, що подається на виконуючий механізм кожного аеродинамічного органу керування та подачу його до каналу керування висотою польоту, який відрізняється тим, що додатково визначають параметри відмов аеродинамічних органів керування літального апарата, визначають вплив відмов на аеродинамічні характеристики літального апарата в процесі польоту, формують сигнал компенсації дії відмов зміною конфігурації аеродинамічних органів керування літального апарата, формують сигнал для відпрацювання перерозподілу сигналів керування аеродинамічними органами керування літального апарата, який є найкращим варіантом розподілення аеродинамічних сил та моментів, та подачу його до каналу керування висотою польоту, що в свою чергу взаємопов'язаний з каналом керування швидкістю.
Текст
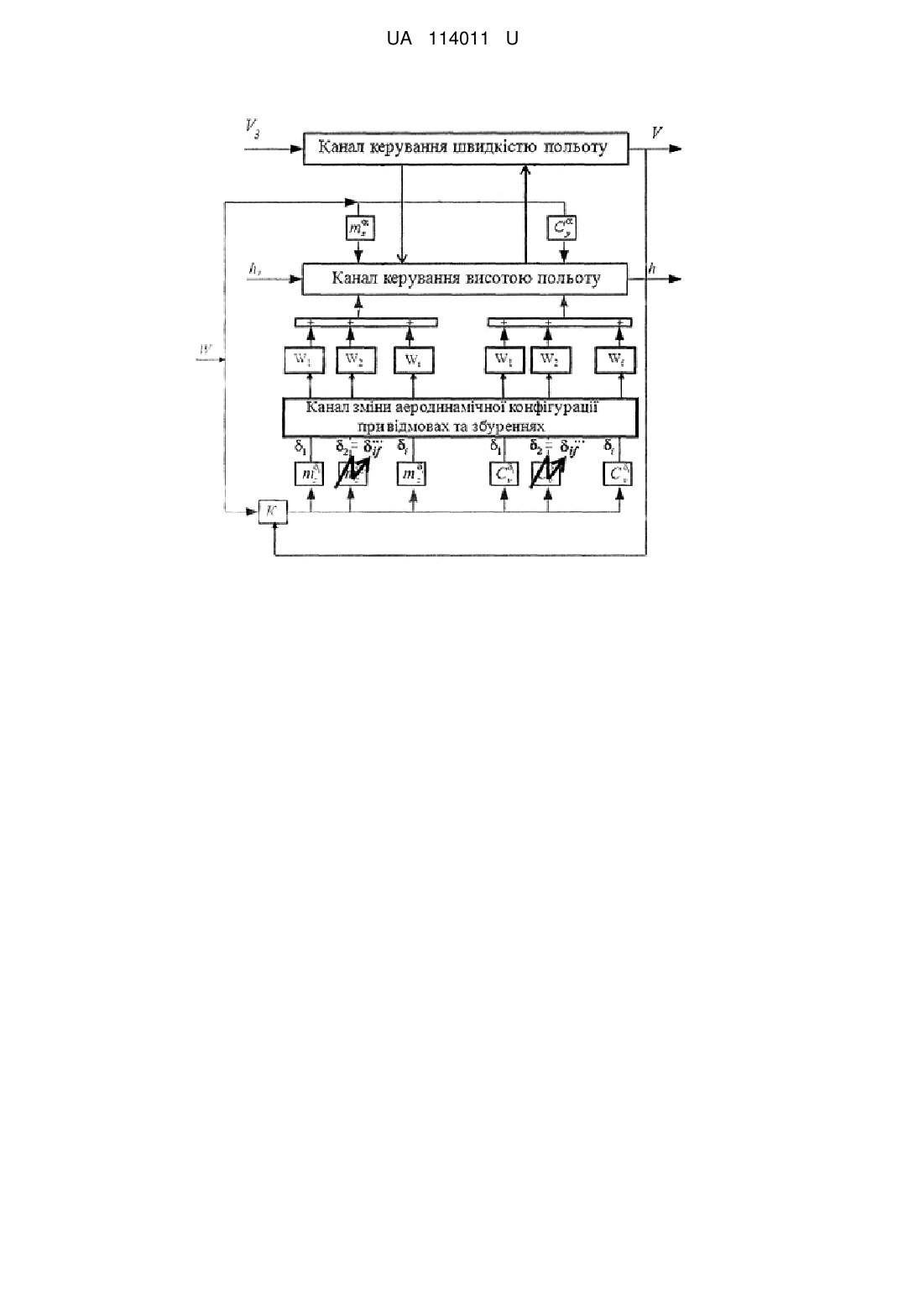
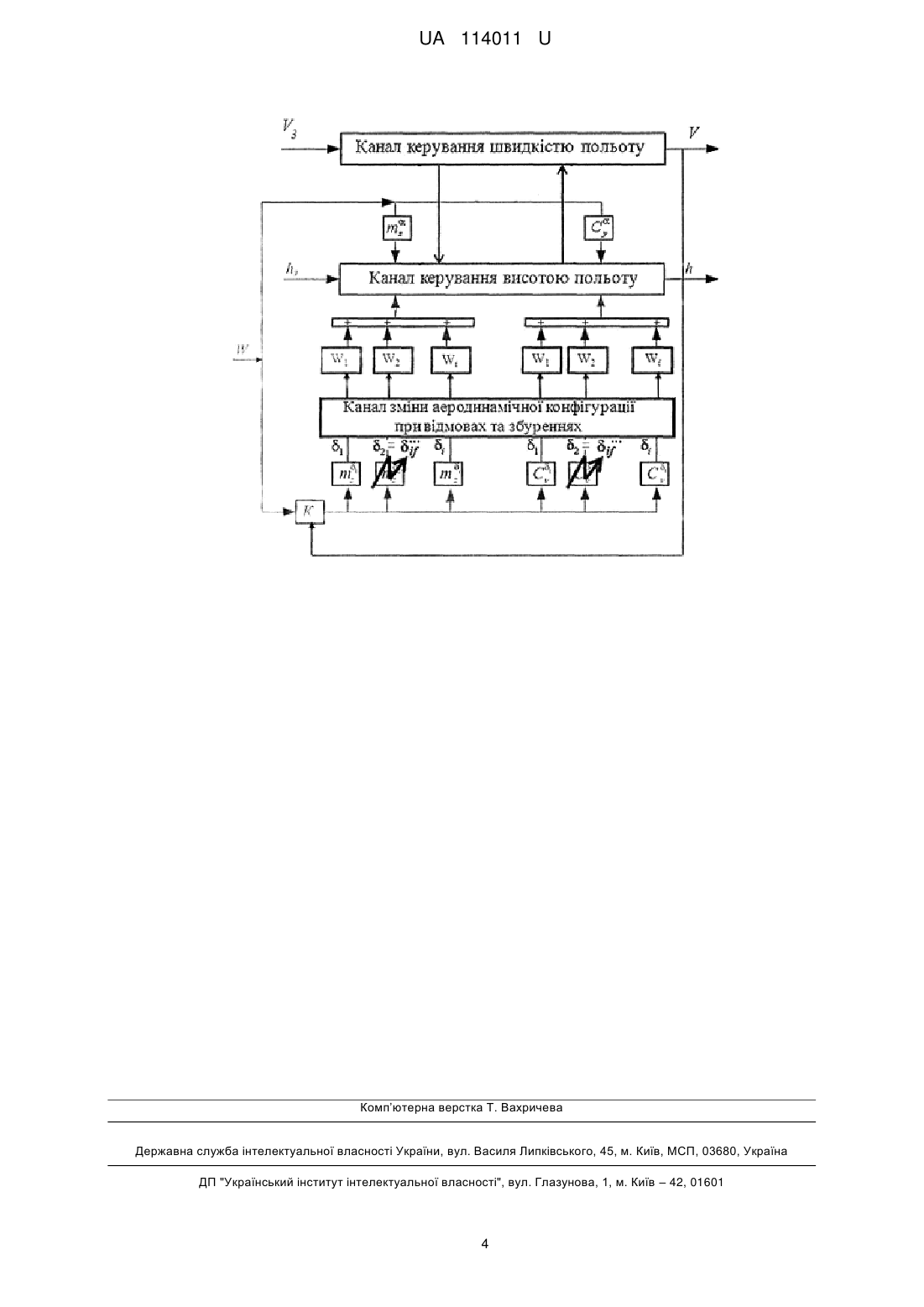
Реферат: Спосіб інваріантної компенсації впливу зовнішніх збурень та відмов аеродинамічних органів керування літального апарата включає вимірювання величини дії зовнішнього збурення, визначення впливу дії зовнішнього збурення на динаміку польоту, формування сигналу компенсації впливу дії зовнішнього збурення зміною конфігурації аеродинамічного профілю літального апарата, формування сигналу керування, що подається на виконуючий механізм кожного аеродинамічного органу керування та подачу його до каналу керування висотою польоту. Додатково визначають параметри відмов аеродинамічних органів керування літального апарата. Визначають вплив відмов на аеродинамічні характеристики літального апарата в процесі польоту. Формують сигнал компенсації дії відмов зміною конфігурації аеродинамічних органів керування літального апарата. Формують сигнал для відпрацювання перерозподілу сигналів керування аеродинамічними органами керування літального апарата, який є найкращим варіантом розподілення аеродинамічних сил та моментів, та подачу його до каналу керування висотою польоту, що в свою чергу взаємопов'язаний з каналом керування швидкістю. UA 114011 U (12) UA 114011 U UA 114011 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі авіації, а більш конкретно належить до систем автоматичного керування літального апарата, систем керування положенням, курсом, висотою або орієнтацією у просторі та систем керування для реагування на несправності та збої. Корисна модель поширюється на множину класів комп'ютерних систем, що ґрунтуються на специфічних математичних моделях, які керовані обчислювальними пристроями і які направлені на реалізацію автоматичних систем управління аеродинамічними органами керування для створення аеродинамічних сил та моментів і може бути використана для підвищення безпеки польотів в авіації. Відомий спосіб зменшення дії вітрових збурень на крило повітряного судна [Патент США № US 6161801 А, МПК В64С 13/16, 2000], вибраний як аналог, базується на зміні аеродинамічної схеми профілю крила, який змінює розподіл підйомної сили на крилі під час різних фаз польоту. Необхідне регулювання розподілення підйомної сили досягається синхронним відхиленням елеронів вгору та вниз. Спосіб зменшення дії вітрових збурень на політ повітряного судна, який застосовує аеродинамічні властивості зміни профілю крила, приводить до зміни розподілу його підйомної сили в момент дії цих збурень. Регулювання зміни профілю крила виконується в залежності від параметрів польоту, таких як висота, швидкість польоту та вага повітряного судна, інакше кажучи, крило адаптується до виконання миттєвої компенсації дії вітрових збурень в даних умовах польоту. Вітрові збурення мають швидко реєструватися датчиками. Виміряна величина дії вітрових збурень подається в систему автоматичного керування, яка створює сигнал компенсації зміною профілю крила, при цьому досягаються великі швидкості відхилення елерона. Недоліками представленого способу є те, що він потребує використання складних швидко реагуючих та чутливих датчиків для виміру значення дії вітрових збурень. В результаті система стає більш складною та дорогою, а також призводить до збільшення ваги системи та повітряного судна в цілому. Найбільш близьким технічним рішенням, вибраним за прототип, є спосіб розподіленої аеродинамічної компенсації дії вітрових збурень на траєкторію польоту повітряного судна [Патент UA № 102654, МПК В64С 13/00, В64С 13/16, 2013]. В основу винаходу поставлена задача розробки способу компенсації дії вітрових збурень на політ повітряного судна, що дозволить покращити якість відпрацювання заданої траєкторії його польоту в збуреній атмосфері та підвищити рівень безпеки польотів. Для вирішення поставленої задачі автоматична система, яка керує безпосередньо підйомною силою крила, відповідно до винаходу, включає додатковий контур розподіленої аеродинамічної адаптивної компенсації дії вітрових збурень. Виміряне значення вітрового збурення з протилежним знаком надходить до бортового комп'ютера, який вираховує кращу комбінацію зміни профілю крила з використанням вагових коефіцієнтів функції підтримки прийняття рішень для кожної окремої частини профілю крила та їх комбінацій. Дані про залежності коефіцієнта підйомної сили, лобового опору та, утвореного їх зміною, моменту тангажу від зміни кута атаки зберігаються в бортовому комп'ютері, котрий в кожен момент часу дії вітрових збурень на траєкторію польоту вираховує можливі варіанти зміни профілю крила. Використання всіх компонентів аеродинамічної схеми крила для прорахунку кращого розподілу сил та моментів для компенсації дії вітрового збурення дозволяє адаптуватися до навколишньої обстановки та підвищити точність відпрацювання заданої траєкторії польоту повітряного судна. Недоліки технічного рішення, вибраного за прототип: 1. Не передбачено можливість дії способу при виникненні відмов аеродинамічних органів керування літального апарата та компенсації наслідків їх впливу. 2. Використання вагових коефіцієнтів функції підтримки прийняття рішень для кожної окремої частини профілю крила та їх комбінацій призводить до зменшення точності і якості дії способу. 3. Розрахунок енергетичних затрат на відпрацювання команд аеродинамічною схемою крила здійснюється без врахування впливу на енергетичний запас літального апарата в цілому. В основу корисної моделі поставлена задача забезпечення інваріантної компенсації впливу зовнішніх збурень і відмов аеродинамічних органів керування літального апарата для підвищення безпеки польотів в авіації та ефективності використання авіаційної техніки шляхом виключення (усунення) недоліків прототипу. Поставлена задача вирішується тим, що автоматична система, яка керує безпосередньо підйомною силою та швидкістю літального апарата, відповідно до корисної моделі, додатково включає канал інваріантної компенсації впливу зовнішніх збурень і відмов аеродинамічних органів керування літального апарата, отримує значення зовнішніх збурень від бортового комп'ютера, отримує інформацію про наявність та параметри відмов аеродинамічних органів 1 UA 114011 U 5 10 15 20 25 керування, враховує характеристики аеродинамічних органів керування (фізичні параметри, швидкість перехідних процесів, динамічні характеристики), визначає вплив наявних зовнішніх збурень та відмов на аеродинамічні характеристики літального апарата в процесі польоту, вираховує та відпрацьовує кращу комбінацію виконання компенсації сигналу дії зовнішнього збурення, визначає конфігурацію аеродинамічних органів керування літального апарата для компенсації наявних відмов, забезпечує відпрацювання перерозподілу сигналів керування аеродинамічними органами керування літального апарата. Крім цього заявлений спосіб враховує вплив змін аеродинамічного профілю літального апарата на швидкість польоту. Використання всіх аеродинамічних органів керування літального апарата при визначенні кращої комбінації компенсації дії зовнішніх збурень та відмов дозволяє зменшити вплив навколишнього середовища та можливих відмов на динаміку і точність витримування траєкторії польоту літального апарата. Суть корисної моделі полягає у визначенні конфігурації аеродинамічних органів керування літального апарата для компенсації наявних відмов, врахування впливу визначеної конфігурації аеродинамічних органів керування літального апарата на швидкість польоту, врахування відпрацювання зміни конфігурації аеродинамічного профілю на енергетичний запас літального апарата в цілому, що дозволить забезпечити високий рівень безпеки польоту літального апарата в умовах невизначеності при наявності відмов та зовнішніх збурень. Надалі корисна модель пояснюється описом конкретного прикладу її виконання і кресленням, де зображено схему інваріантної компенсації впливу зовнішніх збурень та відмов аеродинамічних органів керування літального апарата. Заявлений спосіб реалізується таким чином. Розглядається модель руху літального апарата по заданій траєкторії польоту в умовах зовнішніх збурень при змінній швидкості польоту, де: h3 та h - задане та вихідне значення висоти польоту; V3 та V - задане та вихідне значення швидкості польоту. Для врахування взаємного впливу зміни швидкості польоту та траєкторії руху літального апарата канал керування висотою польоту та канал керування швидкістю польоту об'єднані між собою з урахуванням коефіцієнтів зв'язку. На літальний апарат діє зовнішнє збурення W, величина якого подається в канал керування висотою польоту через прирости коефіцієнта підйомної сили Ca y 30 35 40 та моменту тангажу m a . Тобто, вектор дії зовнішнього збурення впливає на кут атаки, що z призводить до зміни підйомної сили, висоти, моменту тангажу, швидкості літального апарата. Для забезпечення інваріантності зазначених параметрів від впливу зовнішнього збурення вимірюють вертикальну складову зовнішнього збурення і через коефіцієнт пропорційності К подають її до каналу зміни аеродинамічної конфігурації для відпрацювання компенсації аеродинамічними органами керування зі створенням необхідних моментів тангажу і підйомної сили. Крім цього для забезпечення якісного і точного відпрацювання команд аеродинамічними органами керування літального апарата враховуються динамічні характеристики і параметри аеродинамічних поверхонь. Також за допомогою зворотного зв'язку від каналу керування швидкістю польоту визначаються і враховуються енергетичні затрати літального апарата в цілому на відпрацювання команд аеродинамічними поверхнями. На кресленні: 1, 2,..., i - кути відхилення компонентів аеродинамічних органів керування, C - приріст коефіцієнтів підйомної y 45 50 55 сили від відхилення компонентів аеродинамічних органів керування, m - приріст моменту z тангажу від відхилення компонентів аеродинамічних органів керування, W 1 - динамічні характеристики і параметри аеродинамічних поверхонь. При виникненні відмови одного або декількох аеродинамічних органів керування сигнал відхилення компонентів аеродинамічних органів керування i набуває значення if . Даний сигнал подається в канал зміни аеродинамічної конфігурації при відмовах та збуреннях, який включено до бортового комп'ютера, який розраховує комбінацію розподілення аеродинамічних сил та моментів зміни аеродинамічного профілю літального апарата з врахуванням приростів коефіцієнтів підйомної сили C , моменту тангажу m та зміни швидкості польоту V. Задача z y каналу полягає у забезпеченні самоналаштування системи, розподіленні сил і моментів зміни аеродинамічної схеми для компенсації впливу відмов компонентів аеродинамічних органів керування на зміну динаміки польоту літального апарата з високою якістю та швидкістю витримування заданої траєкторії польоту літального апарата. Канал зміни аеродинамічної конфігурації при відмовах також забезпечує ефективне відхилення компонентів аеродинамічних органів керування літального апарата шляхом перерозподілу сигналів керування між окремими 2 UA 114011 U 5 10 15 компонентами аеродинамічного профілю літального апарата, які знаходяться в справному стані. При дії зовнішнього збурення W на траєкторію польоту літального апарата виміряний сигнал подається в канал зміни конфігурації при відмовах та збуреннях, який включено до бортового комп'ютера, який розраховує комбінацію розподілення аеродинамічних сил та моментів зміни аеродинамічного профілю літального апарата з врахуванням приростів коефіцієнтів підйомної сили C , моменту тангажу m та зміни швидкості польоту V. Схема інваріантної компенсації z y впливу зовнішніх збурень дозволяє здійснити керування зміною аеродинамічної конфігурації літального апарата для зменшення відхилень від заданої траєкторії польоту в умовах дії зовнішніх збурень, а також підвищити якість відпрацювання команд аеродинамічними органами керування. Спосіб забезпечує компенсацію наслідків дії збурень та відмов в межах наявних аеродинамічних та функціональних можливостей літального апарата. Заявлений спосіб має циклічний характер реалізації та виконується постійно в масштабі реального часу на літальному апараті в процесі його руху, що забезпечує високий рівень безпеки польоту. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 Спосіб інваріантної компенсації впливу зовнішніх збурень та відмов аеродинамічних органів керування літального апарата, що включає вимірювання величини дії зовнішнього збурення, визначення впливу дії зовнішнього збурення на динаміку польоту, формування сигналу компенсації впливу дії зовнішнього збурення зміною конфігурації аеродинамічного профілю літального апарата, формування сигналу керування, що подається на виконуючий механізм кожного аеродинамічного органу керування та подачу його до каналу керування висотою польоту, який відрізняється тим, що додатково визначають параметри відмов аеродинамічних органів керування літального апарата, визначають вплив відмов на аеродинамічні характеристики літального апарата в процесі польоту, формують сигнал компенсації дії відмов зміною конфігурації аеродинамічних органів керування літального апарата, формують сигнал для відпрацювання перерозподілу сигналів керування аеродинамічними органами керування літального апарата, який є найкращим варіантом розподілення аеродинамічних сил та моментів, та подачу його до каналу керування висотою польоту, що в свою чергу взаємопов'язаний з каналом керування швидкістю. 3 UA 114011 U Комп’ютерна верстка Т. Вахричева Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут інтелектуальної власності", вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B64C 13/16, B60W 20/50, G05D 1/00, G05B 15/00
Мітки: впливу, зовнішніх, аеродинамічних, керування, спосіб, апарата, літального, збурень, компенсації, органів, інваріантної, відмов
Код посилання
<a href="https://ua.patents.su/6-114011-sposib-invariantno-kompensaci-vplivu-zovnishnikh-zburen-ta-vidmov-aerodinamichnikh-organiv-keruvannya-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб інваріантної компенсації впливу зовнішніх збурень та відмов аеродинамічних органів керування літального апарата</a>
Спосіб розподіленої аеродинамічної компенсації дії вітрових збурень на траєкторію польоту повітряного судна
Номер патенту: 78068
Опубліковано: 11.03.2013
Автори: Павлов Вадим Володимирович, Копитова Катерина Анатоліївна
МПК: B64C 13/00
Мітки: спосіб, траєкторію, польоту, повітряного, розподіленої, судна, збурень, дії, компенсації, вітрових, аеродинамічної
Формула / Реферат:
Спосіб розподіленої аеродинамічної компенсації дії вітрових збурень на траєкторію польоту повітряного судна, що включає вимірювання величини дії вітрового збурення, створення сигналу компенсації зміною профілю крила та подачу його до контуру керування висотою польоту, який відрізняється тим, що перед подачею сигналу компенсації зміною профілю крила до контуру керування висотою польоту створюють протилежний за знаком сигнал компенсації дії...
Спосіб розподіленої аеродинамічної компенсації дії вітрових збурень на траєкторію польоту повітряного судна
Номер патенту: 102654
Опубліковано: 25.07.2013
Автори: Павлов Вадим Володимирович, Копитова Катерина Анатоліївна
МПК: B64C 13/00, B64C 13/16
Мітки: траєкторію, аеродинамічної, спосіб, розподіленої, збурень, повітряного, польоту, судна, дії, компенсації, вітрових
Формула / Реферат:
Спосіб розподіленої аеродинамічної компенсації дії вітрових збурень на траєкторію польоту повітряного судна, що включає вимірювання величини дії вітрового збурення, створення сигналу компенсації зміною профілю крила та подачу його до контуру керування висотою польоту, який відрізняється тим, що перед подачею сигналу компенсації зміною профілю крила до контуру керування висотою польоту створюють протилежний за знаком сигнал компенсації дії...
Тришарова обшивка аеродинамічних поверхонь безпілотного літального апарата
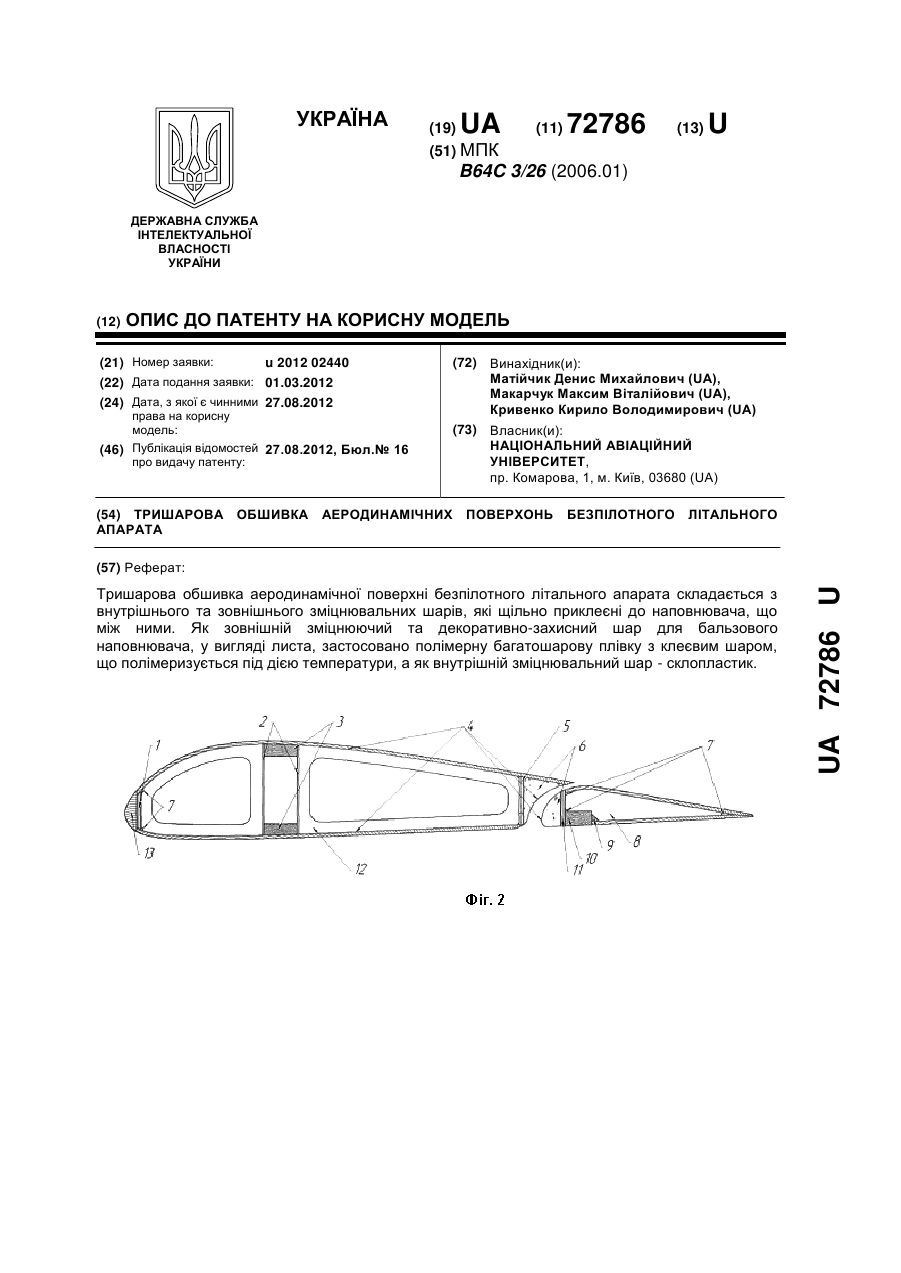
Номер патенту: 72786
Опубліковано: 27.08.2012
Автори: Матійчик Денис Михайлович, Макарчук Максим Віталійович, Кривенко Кирило Володимирович
МПК: B64C 3/26
Мітки: апарата, тришарова, обшивка, поверхонь, літального, безпілотного, аеродинамічних
Формула / Реферат:
Тришарова обшивка аеродинамічної поверхні безпілотного літального апарата, яка складається з внутрішнього та зовнішнього зміцнювальних шарів, які щільно приклеєні до наповнювача, що між ними, яка відрізняється тим, що як зовнішній зміцнюючий та декоративно-захисний шар для бальзового наповнювача, у вигляді листа, застосовано полімерну багатошарову плівку з клеєвим шаром, що полімеризується під дією температури, а як внутрішній зміцнювальний...
Спосіб визначення аеродинамічних коефіцієнтів при моделюванні літального апарата на авіаційному тренажері
Номер патенту: 83049
Опубліковано: 27.08.2013
Автори: Ратніков Ігор Миколайович, Моцар Петро Іванович, Петров Роман Миколайович
Мітки: літального, коефіцієнтів, моделюванні, аеродинамічних, тренажері, апарата, авіаційному, спосіб, визначення
Формула / Реферат:
Спосіб визначення аеродинамічних коефіцієнтів при моделюванні літального апарата на авіаційному тренажері, який полягає в тому, що за допомогою апаратних і програмних засобів авіаційного тренажера здійснюють коректування аеродинамічних коефіцієнтів математичної моделі динаміки польоту літального апарата з використанням методу симплекс-планування, при якому нормують змінні значення аеродинамічних коефіцієнтів сил і моментів просторового руху...
Спосіб керування і зміни аеродинамічного компонування безпілотного літального апарата
Номер патенту: 83708
Опубліковано: 11.08.2008
Автори: Клявлін Валерій Володимирович, Комендантова Людмила Степанівна, Коростельов Олег Петрович, Сайног Максим Борисович, Кузьмін В'ячеслав Павлович, Яковенко Петро Олексійович
МПК: F42B 15/01
Мітки: аеродинамічного, літального, апарата, спосіб, компонування, зміни, керування, безпілотного
Формула / Реферат:
1. Спосіб керування і зміни аеродинамічного компонування безпілотного літального апарата, що містить стартовий і маршовий двигуни, який включає його пуск з транспортно-пускового контейнера з примусовим розкручуванням навколо поздовжньої осі, підтримання необхідної частоти обертання на траєкторії, зміну аеродинамічного компонування у польоті, а також керування в одноканальному режимі по тангажу і рисканню, який відрізняється тим, що як на...
Попередній патент: Пристрій для випробування одного похилого перерізу в залізобетонних балках
Наступний патент: Спосіб маркірування технічного об’єкта для його ідентифікації
Випадковий патент: Спосіб прогнозування формування затримки статевого розвитку у хлопців - підлітків