Датчик кутових вібрацій
Формула / Реферат
Датчик кутових вібрацій, що містить сейсмічну масу, котушку та торсійні пружини, який відрізняється тим, що як сейсмічну масу застосовано постійний стрижневий прямокутний магніт, а як котушку застосовано дві пари котушок, розташованих з протилежних боків постійного стрижневого прямокутного магніту, при цьому пари котушок зміщені одна від одної на відстань, що дорівнює довжині постійного стрижневого прямокутного магніту, при цьому початки котушок, розташованих навхрест, об'єднані, кінці інших котушок, розташованих навхрест, об'єднані, кінець та початок котушок, розташованих з одного боку постійного стрижневого прямокутного магніту, також об'єднані, а початок та кінець котушок, розміщених з іншого боку постійного стрижневого прямокутного магніту, підключені до диференціатора.
Текст
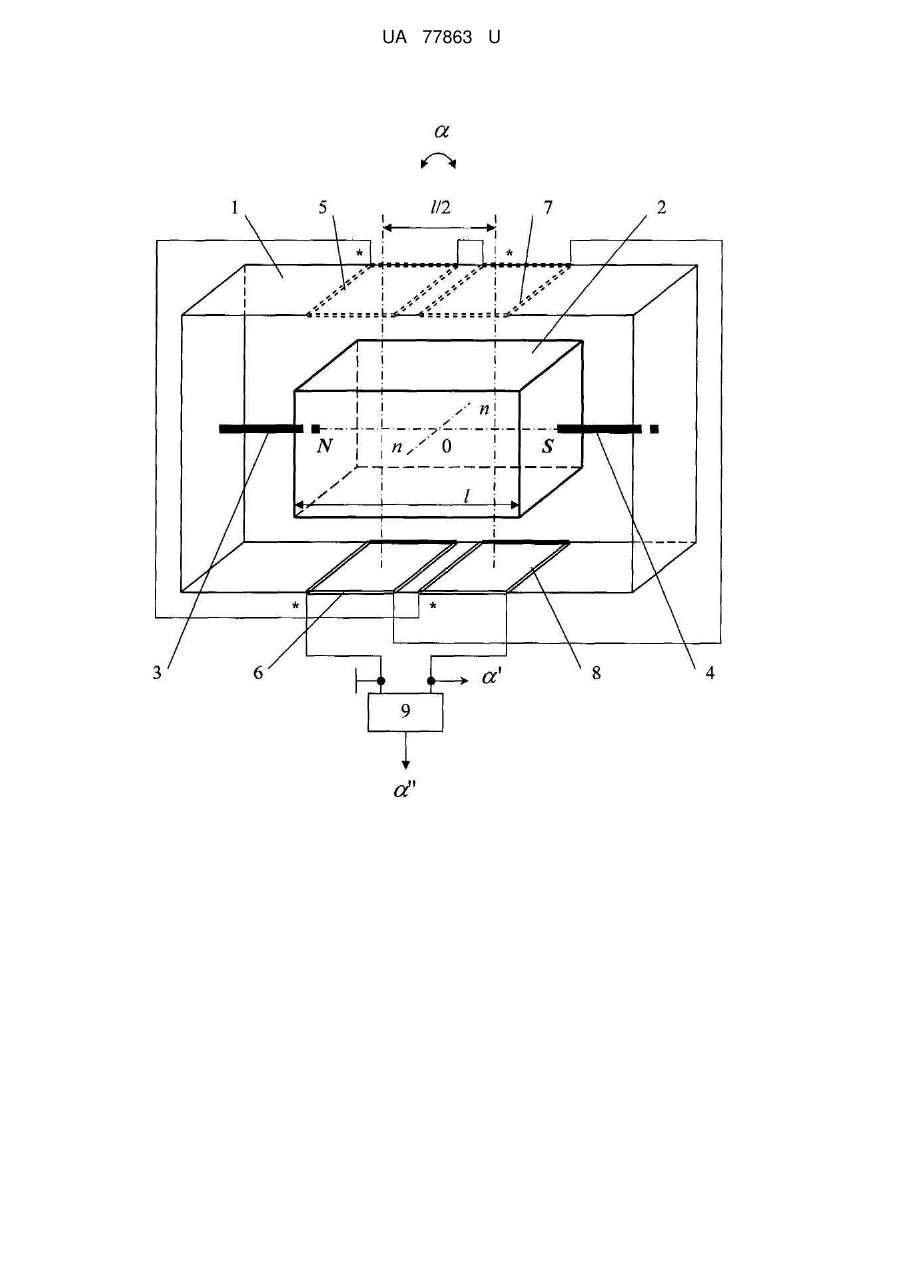
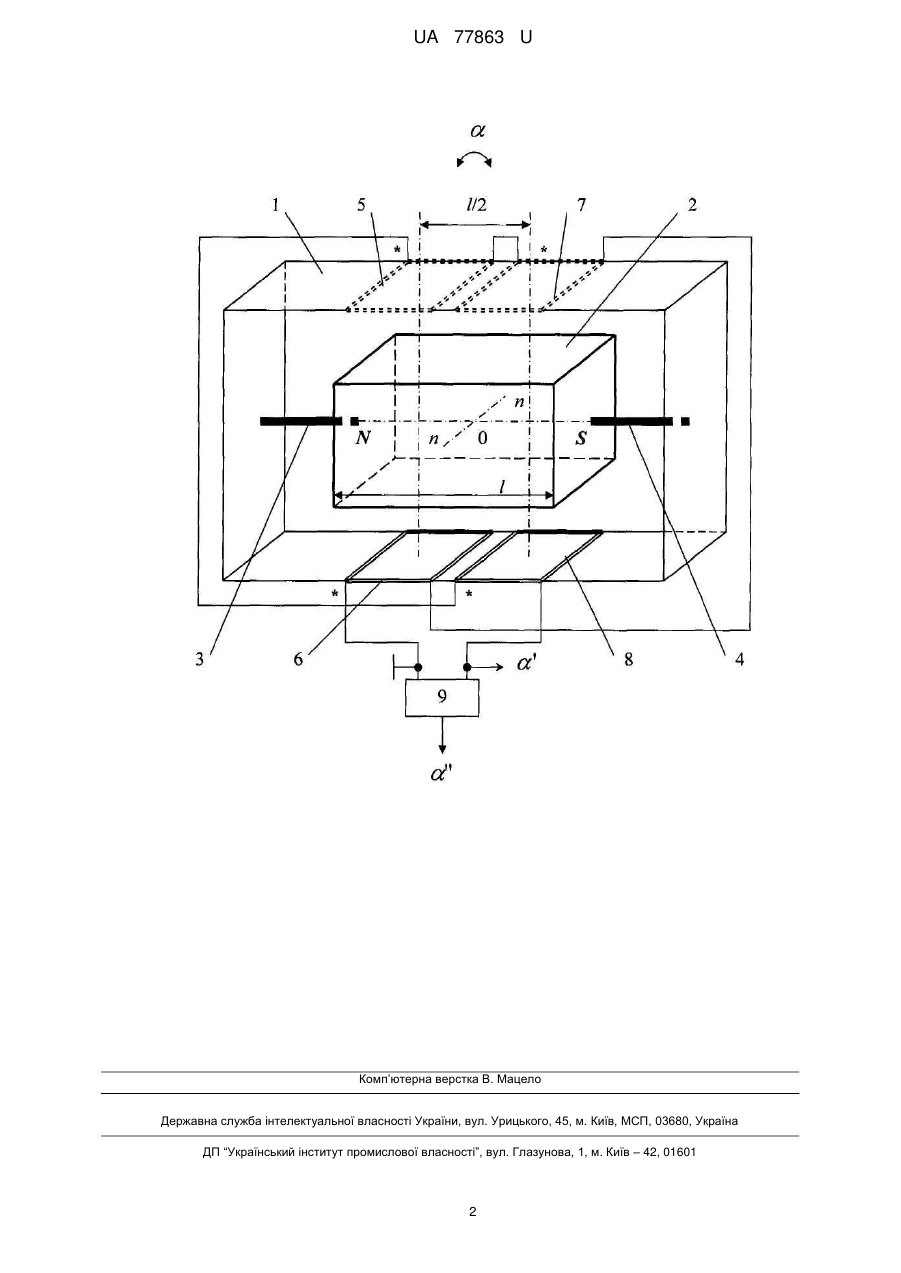
Реферат: UA 77863 U UA 77863 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до вимірювальної техніки та може бути використана для вимірювання кутових віброшвидкостей та кутових віброприскорень. Відомо датчик кутових вібрацій, що містить сейсмічну масу, котушку та торсійні пружини [див. Измерения в промышленности. Справ, изд. В 3-х кн. Кн 2. Способы измерения и аппаратура: Пер. с нем. / Под ред. Профоса П. - 2-е изд., перераб. и доп. - М: Металлургия, 1990. - С. 86]. Цей датчик обрано за найближчий аналог. Недоліком відомого датчика кутових вібрацій є те, що наявність пасивної котушки та сейсмічної маси не забезпечує достатню чутливість датчика, а неможливість вимірювання кутових віброприскорень звужує сферу застосування датчика. В основу корисної моделі поставлена задача вдосконалення датчика кутових вібрацій шляхом того, що як сейсмічну масу застосовано постійний стрижневий прямокутний магніт, а як котушку застосовано дві пари котушок, розташованих з протилежних боків постійного стрижневого прямокутного магніту, при цьому пари котушок зміщені одна від одної на відстань, що дорівнює довжині постійного стрижневого прямокутного магніту, при цьому початки котушок, розташованих навхрест, об'єднані, кінці інших котушок, розташованих навхрест, об'єднані, кінець та початок котушок, розташованих з одного боку постійного стрижневого прямокутного магніту, також об'єднані, а початок та кінець котушок, розміщених з іншого боку постійного стрижневого прямокутного магніту, підключені до диференціатора, що дозволить підвищити чутливість датчика та вимірювати кутові віброприскорення. Поставлена задача вирішується тим, що у датчику кутових вібрацій, що містить сейсмічну масу, котушку та торсійні пружини, згідно корисної моделі, як сейсмічну масу застосовано постійний стрижневий прямокутний магніт, а як котушку застосовано дві пари котушок, розташованих з протилежних боків постійного стрижневого прямокутного магніту, при цьому пари котушок зміщені одна від одної на відстань, що дорівнює довжині постійного стрижневого прямокутного магніту, при цьому початки котушок, розташованих навхрест, об'єднані, кінці інших котушок, розташованих навхрест, об'єднані, кінець та початок котушок, розташованих з одного боку постійного стрижневого прямокутного магніту, також об'єднані, а початок та кінець котушок, розміщених з іншого боку постійного стрижневого прямокутного магніту, підключені до диференціатора. Суть корисної моделі пояснюється кресленням, де зображено датчик кутових вібрацій, що містить корпус 1, постійний стрижневий прямокутний магніт 2, який використовуються як збалансована (сейсмічна) маса, торсійні пружини 3, 4, першу 5, 6 та другу 7, 8 пари котушок, зміщені одна від одної на відстань, що дорівнює довжині l постійного стрижневого прямокутного магніту 2, початки котушок 5, 8 з'єднані, кінці котушок 6, 7 з'єднані, кінець котушки 5 та початок котушки 7 також об'єднані, а початок котушки 6 та кінець котушки 8 підключені до диференціатора 9. Датчик кутових вібрацій працює наступним чином. При відсутності кутових вібрацій постійний стрижневий прямокутний магніт 2 під дією торсійних пружин 3, 4 знаходяться у середньому положенні, при цьому вихідні сигнали датчика дорівнюють нулю. При вібрації корпуса 1 відносно постійного стрижневого прямокутного магніту 2 на котушках 6, 7 сигнали збільшуються (зменшуються), а на котушках 5, 8 сигнали зменшуються (збільшуються), у результаті чого на виходах котушок 5-8 з'являється почетверений сигнал α', пропорційний кутовій віброшвидкості, а на виході диференціатора 9 з'являється сигнал α'', пропорційний кутовому віброприскоренню. Пропонована корисна модель забезпечить підвищення чутливості та розширення функціональних можливостей датчика. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 Датчик кутових вібрацій, що містить сейсмічну масу, котушку та торсійні пружини, який відрізняється тим, що як сейсмічну масу застосовано постійний стрижневий прямокутний магніт, а як котушку застосовано дві пари котушок, розташованих з протилежних боків постійного стрижневого прямокутного магніту, при цьому пари котушок зміщені одна від одної на відстань, що дорівнює довжині постійного стрижневого прямокутного магніту, при цьому початки котушок, розташованих навхрест, об'єднані, кінці інших котушок, розташованих навхрест, об'єднані, кінець та початок котушок, розташованих з одного боку постійного стрижневого прямокутного магніту, також об'єднані, а початок та кінець котушок, розміщених з іншого боку постійного стрижневого прямокутного магніту, підключені до диференціатора. 1 UA 77863 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюSensor of angular vibrations
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюДатчик угловых вибраций
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01G 9/00
Мітки: датчик, кутових, вібрацій
Код посилання
<a href="https://ua.patents.su/4-77863-datchik-kutovikh-vibracijj.html" target="_blank" rel="follow" title="База патентів України">Датчик кутових вібрацій</a>
Датчик вібрацій
Номер патенту: 77856
Опубліковано: 25.02.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Формула / Реферат:
Датчик вібрацій, що містить корпус, постійний циліндричний магніт, котушку та дві циліндричні пружини, який відрізняється тим, що як постійний циліндричний магніт застосовано постійний стрижневий прямокутний магніт, прикріплений боковими гранями через чотири пружини до корпусу, а як котушку застосовано дві пари ферозондів, розташованих у взаємно перпендикулярних площинах з боку бокових граней постійного стрижневого прямокутного магніту, при...
Датчик вібрацій
Номер патенту: 74863
Опубліковано: 12.11.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Формула / Реферат:
Датчик вібрацій, що містить постійний циліндричний магніт, котушку та дві циліндричні пружини, який відрізняється тим, що як котушку застосовано пару ферозондів, розташованих з протилежних боків постійного циліндричного магніту, при цьому ферозонди з'єднані один з одним за диференціальною схемою.
Датчик вібрацій
Номер патенту: 72846
Опубліковано: 27.08.2012
Автори: Смірний Михайло Федорович, Марченко Дмитро Миколайович
МПК: G01G 9/00
Формула / Реферат:
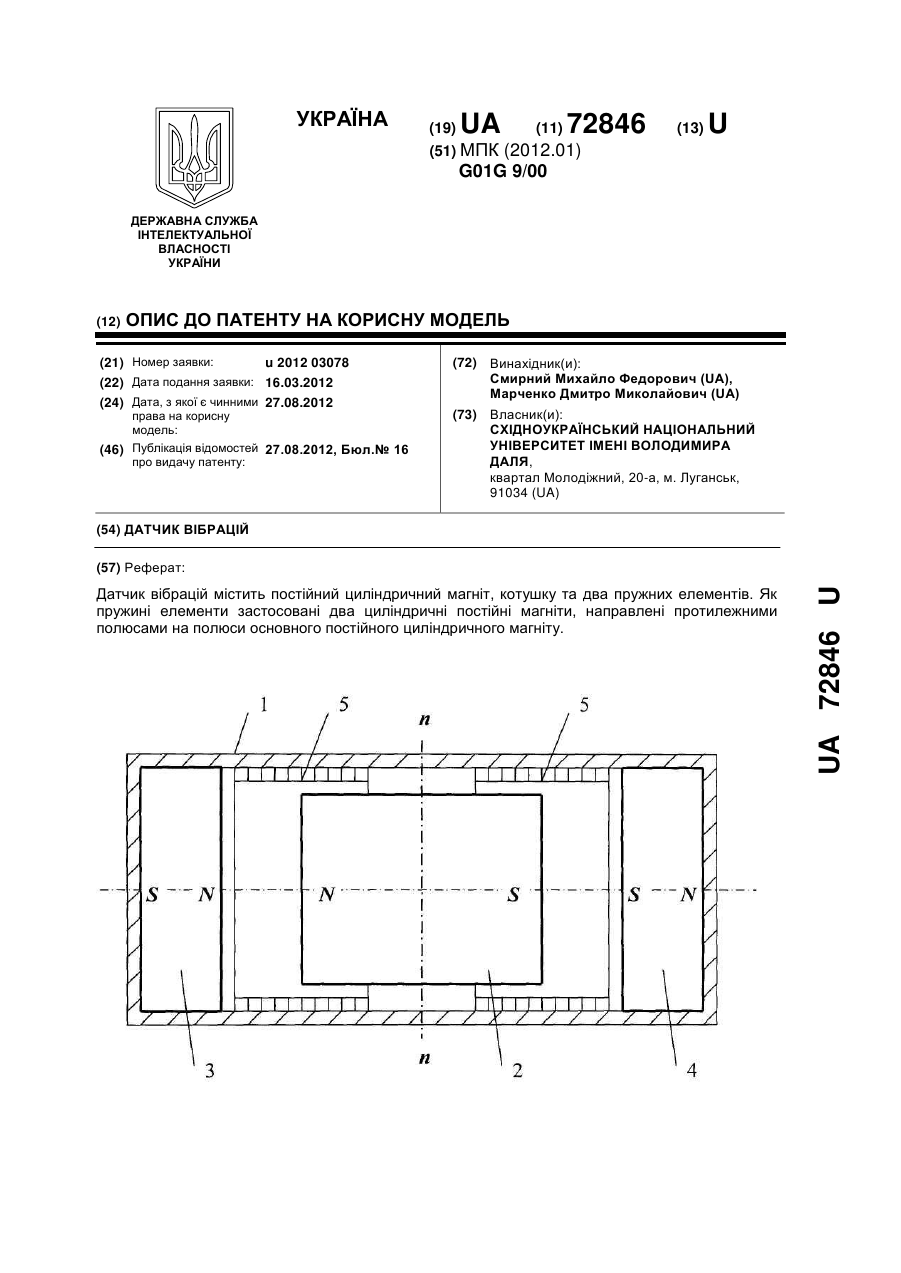
Датчик вібрацій, що містить постійний циліндричний магніт, котушку та два пружних елементів, який відрізняється тим, що як пружині елементи застосовані два циліндричні постійні магніти, направлені протилежними полюсами на полюси основного постійного циліндричного магніту.
Датчик
Номер патенту: 74386
Опубліковано: 25.10.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик
Формула / Реферат:
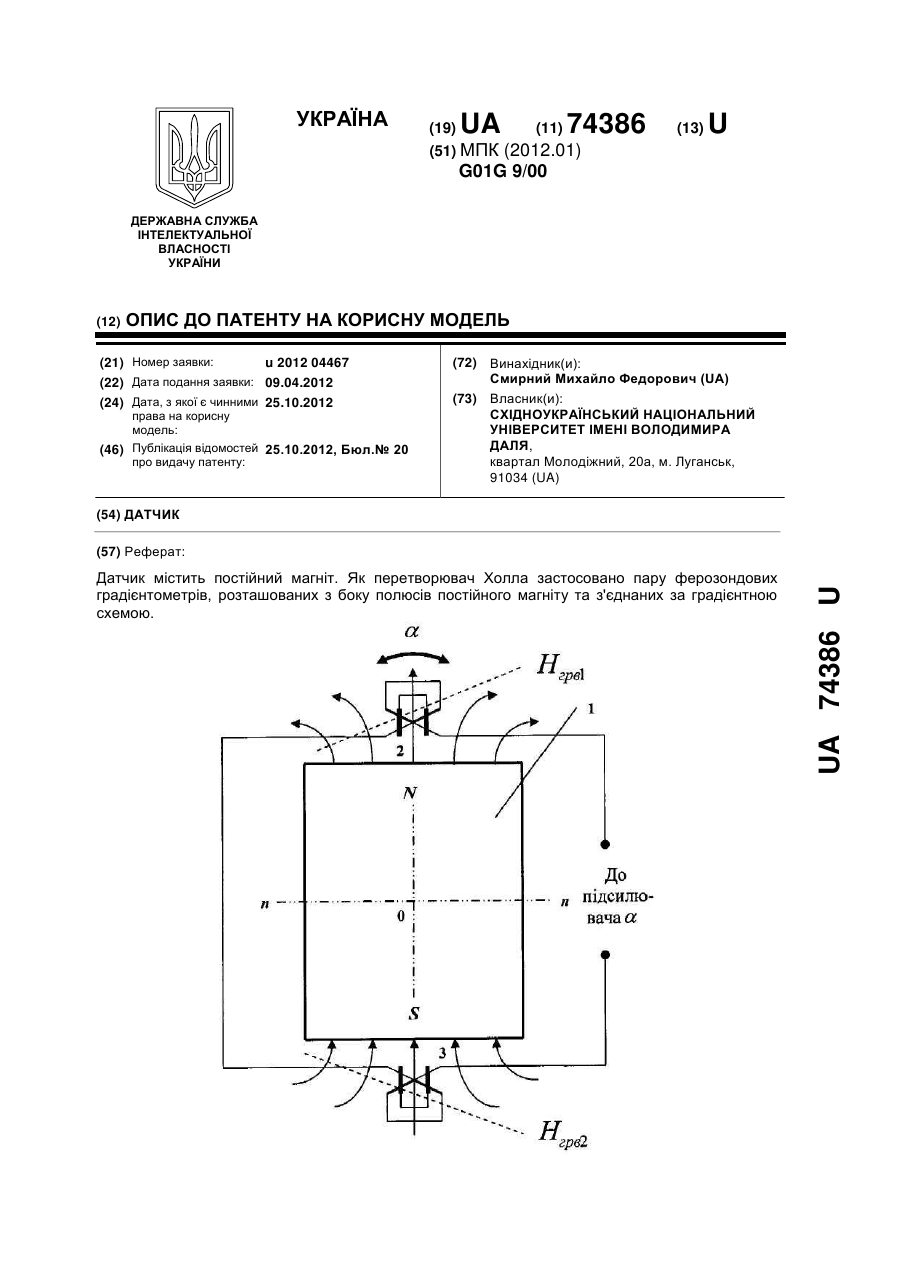
Датчик, що містить постійний магніт, який відрізняється тим, що як перетворювач Холла застосовано пару ферозондових градієнтометрів, розташованих з боку полюсів постійного магніту та з'єднаних за градієнтною схемою.
Датчик кутових переміщень
Номер патенту: 28737
Опубліковано: 25.12.2007
Автори: Тимченко Марина Юріївна, Гордін Олександр Григорович
МПК: G01B 7/30
Мітки: кутових, датчик, переміщень
Формула / Реферат:
1 Датчик кутових переміщень, що містить корпус та рухомий елемент, який відрізняється тим, що в його склад введено кругову призму, зв'язану з рухомим елементом, ходовий ролик, вісь якого за допомогою штока зв'язана з першим пружним елементом і який зв'язаний з рухомою рамою, що з'єднана з корпусом за допомогою другого пружного елемента, розміщений у рухомій рамі струнний перетворювач інформації, який містить дві струнні пружні розтяжки,...
Попередній патент: Пристрій для визначення механічних напружень у феромагнітних конструкціях
Наступний патент: Спосіб запобігання розвитку реперфузійних порушень функції серця
Випадковий патент: Спосіб дослідження властивостей рідини