Система стабілізації мобільної радіолокаційної системи виявлення
Номер патенту: 78883
Опубліковано: 10.04.2013
Автори: Столярова Світлана сергіївна, Смирнова Людмила Іванівна

Формула / Реферат
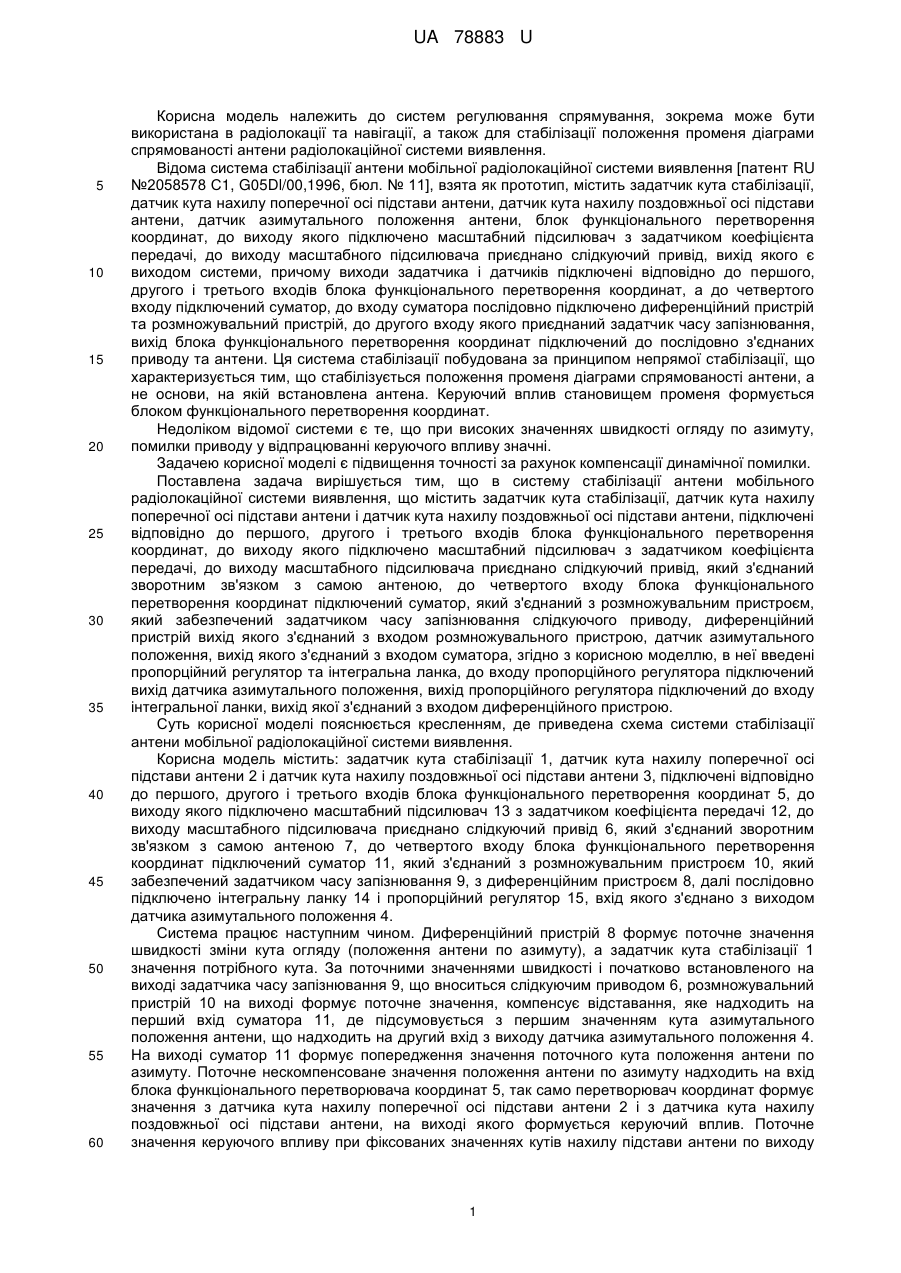
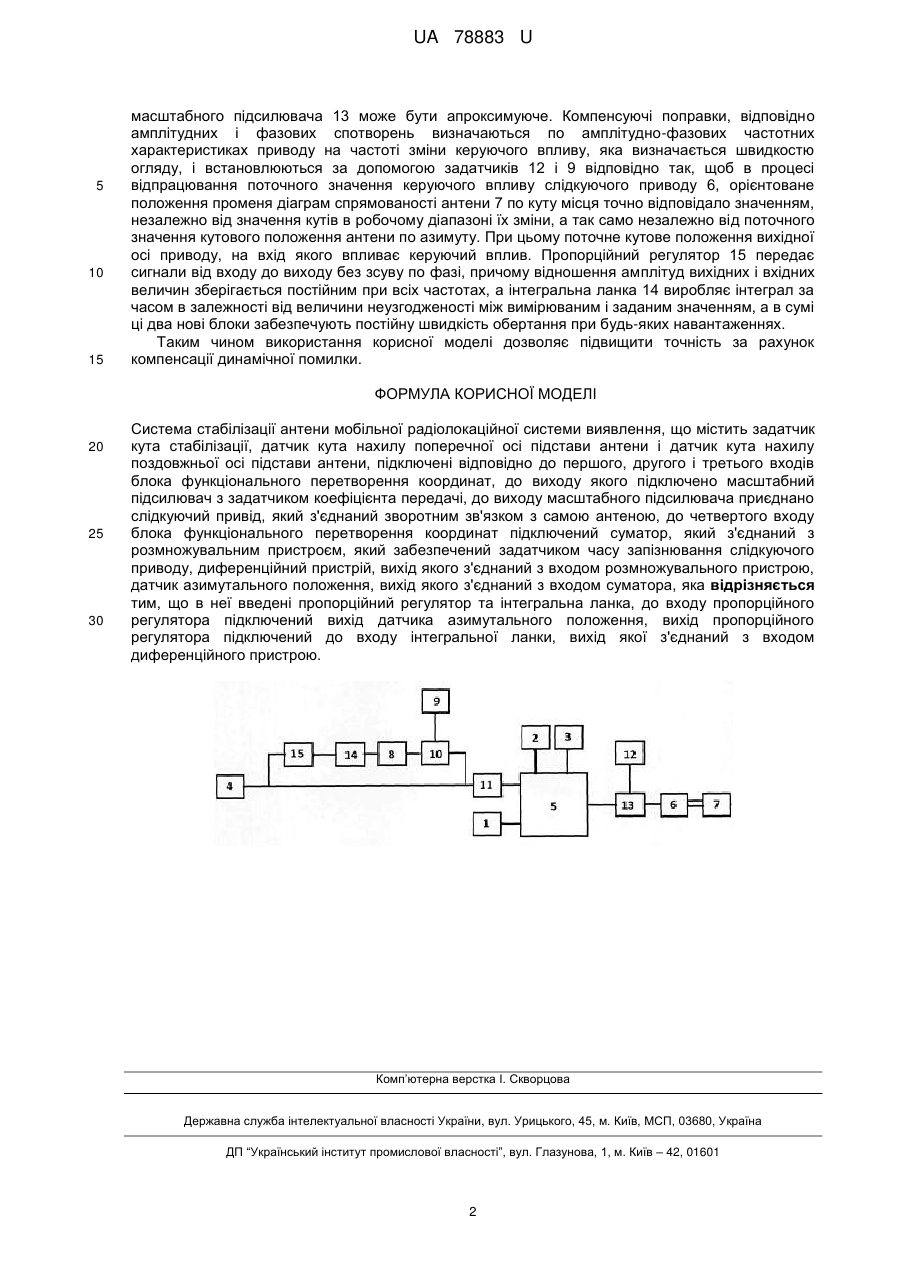
Система стабілізації антени мобільної радіолокаційної системи виявлення, що містить задатчик кута стабілізації, датчик кута нахилу поперечної осі підстави антени і датчик кута нахилу поздовжньої осі підстави антени, підключені відповідно до першого, другого і третього входів блока функціонального перетворення координат, до виходу якого підключено масштабний підсилювач з задатчиком коефіцієнта передачі, до виходу масштабного підсилювача приєднано слідкуючий привід, який з'єднаний зворотним зв'язком з самою антеною, до четвертого входу блока функціонального перетворення координат підключений суматор, який з'єднаний з розмножувальним пристроєм, який забезпечений задатчиком часу запізнювання слідкуючого приводу, диференційний пристрій, вихід якого з'єднаний з входом розмножувального пристрою, датчик азимутального положення, вихід якого з'єднаний з входом суматора, яка відрізняється тим, що в неї введені пропорційний регулятор та інтегральна ланка, до входу пропорційного регулятора підключений вихід датчика азимутального положення, вихід пропорційного регулятора підключений до входу інтегральної ланки, вихід якої з'єднаний з входом диференційного пристрою.
Текст
Реферат: UA 78883 U UA 78883 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до систем регулювання спрямування, зокрема може бути використана в радіолокації та навігації, а також для стабілізації положення променя діаграми спрямованості антени радіолокаційної системи виявлення. Відома система стабілізації антени мобільної радіолокаційної системи виявлення [патент RU №2058578 С1, G05Dl/00,1996, бюл. № 11], взята як прототип, містить задатчик кута стабілізації, датчик кута нахилу поперечної осі підстави антени, датчик кута нахилу поздовжньої осі підстави антени, датчик азимутального положення антени, блок функціонального перетворення координат, до виходу якого підключено масштабний підсилювач з задатчиком коефіцієнта передачі, до виходу масштабного підсилювача приєднано слідкуючий привід, вихід якого є виходом системи, причому виходи задатчика і датчиків підключені відповідно до першого, другого і третього входів блока функціонального перетворення координат, а до четвертого входу підключений суматор, до входу суматора послідовно підключено диференційний пристрій та розмножувальний пристрій, до другого входу якого приєднаний задатчик часу запізнювання, вихід блока функціонального перетворення координат підключений до послідовно з'єднаних приводу та антени. Ця система стабілізації побудована за принципом непрямої стабілізації, що характеризується тим, що стабілізується положення променя діаграми спрямованості антени, а не основи, на якій встановлена антена. Керуючий вплив становищем променя формується блоком функціонального перетворення координат. Недоліком відомої системи є те, що при високих значеннях швидкості огляду по азимуту, помилки приводу у відпрацюванні керуючого впливу значні. Задачею корисної моделі є підвищення точності за рахунок компенсації динамічної помилки. Поставлена задача вирішується тим, що в систему стабілізації антени мобільного радіолокаційної системи виявлення, що містить задатчик кута стабілізації, датчик кута нахилу поперечної осі підстави антени і датчик кута нахилу поздовжньої осі підстави антени, підключені відповідно до першого, другого і третього входів блока функціонального перетворення координат, до виходу якого підключено масштабний підсилювач з задатчиком коефіцієнта передачі, до виходу масштабного підсилювача приєднано слідкуючий привід, який з'єднаний зворотним зв'язком з самою антеною, до четвертого входу блока функціонального перетворення координат підключений суматор, який з'єднаний з розмножувальним пристроєм, який забезпечений задатчиком часу запізнювання слідкуючого приводу, диференційний пристрій вихід якого з'єднаний з входом розмножувального пристрою, датчик азимутального положення, вихід якого з'єднаний з входом суматора, згідно з корисною моделлю, в неї введені пропорційний регулятор та інтегральна ланка, до входу пропорційного регулятора підключений вихід датчика азимутального положення, вихід пропорційного регулятора підключений до входу інтегральної ланки, вихід якої з'єднаний з входом диференційного пристрою. Суть корисної моделі пояснюється кресленням, де приведена схема системи стабілізації антени мобільної радіолокаційної системи виявлення. Корисна модель містить: задатчик кута стабілізації 1, датчик кута нахилу поперечної осі підстави антени 2 і датчик кута нахилу поздовжньої осі підстави антени 3, підключені відповідно до першого, другого і третього входів блока функціонального перетворення координат 5, до виходу якого підключено масштабний підсилювач 13 з задатчиком коефіцієнта передачі 12, до виходу масштабного підсилювача приєднано слідкуючий привід 6, який з'єднаний зворотним зв'язком з самою антеною 7, до четвертого входу блока функціонального перетворення координат підключений суматор 11, який з'єднаний з розмножувальним пристроєм 10, який забезпечений задатчиком часу запізнювання 9, з диференційним пристроєм 8, далі послідовно підключено інтегральну ланку 14 і пропорційний регулятор 15, вхід якого з'єднано з виходом датчика азимутального положення 4. Система працює наступним чином. Диференційний пристрій 8 формує поточне значення швидкості зміни кута огляду (положення антени по азимуту), а задатчик кута стабілізації 1 значення потрібного кута. За поточними значеннями швидкості і початково встановленого на виході задатчика часу запізнювання 9, що вноситься слідкуючим приводом 6, розмножувальний пристрій 10 на виході формує поточне значення, компенсує відставання, яке надходить на перший вхід суматора 11, де підсумовується з першим значенням кута азимутального положення антени, що надходить на другий вхід з виходу датчика азимутального положення 4. На виході суматор 11 формує попередження значення поточного кута положення антени по азимуту. Поточне нескомпенсоване значення положення антени по азимуту надходить на вхід блока функціонального перетворювача координат 5, так само перетворювач координат формує значення з датчика кута нахилу поперечної осі підстави антени 2 і з датчика кута нахилу поздовжньої осі підстави антени, на виході якого формується керуючий вплив. Поточне значення керуючого впливу при фіксованих значеннях кутів нахилу підстави антени по виходу 1 UA 78883 U 5 10 15 масштабного підсилювача 13 може бути апроксимуюче. Компенсуючі поправки, відповідно амплітудних і фазових спотворень визначаються по амплітудно-фазових частотних характеристиках приводу на частоті зміни керуючого впливу, яка визначається швидкостю огляду, і встановлюються за допомогою задатчиків 12 і 9 відповідно так, щоб в процесі відпрацювання поточного значення керуючого впливу слідкуючого приводу 6, орієнтоване положення променя діаграм спрямованості антени 7 по куту місця точно відповідало значенням, незалежно від значення кутів в робочому діапазоні їх зміни, а так само незалежно від поточного значення кутового положення антени по азимуту. При цьому поточне кутове положення вихідної осі приводу, на вхід якого впливає керуючий вплив. Пропорційний регулятор 15 передає сигнали від входу до виходу без зсуву по фазі, причому відношення амплітуд вихідних і вхідних величин зберігається постійним при всіх частотах, а інтегральна ланка 14 виробляє інтеграл за часом в залежності від величини неузгодженості між вимірюваним і заданим значенням, а в сумі ці два нові блоки забезпечують постійну швидкість обертання при будь-яких навантаженнях. Таким чином використання корисної моделі дозволяє підвищити точність за рахунок компенсації динамічної помилки. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 Система стабілізації антени мобільної радіолокаційної системи виявлення, що містить задатчик кута стабілізації, датчик кута нахилу поперечної осі підстави антени і датчик кута нахилу поздовжньої осі підстави антени, підключені відповідно до першого, другого і третього входів блока функціонального перетворення координат, до виходу якого підключено масштабний підсилювач з задатчиком коефіцієнта передачі, до виходу масштабного підсилювача приєднано слідкуючий привід, який з'єднаний зворотним зв'язком з самою антеною, до четвертого входу блока функціонального перетворення координат підключений суматор, який з'єднаний з розмножувальним пристроєм, який забезпечений задатчиком часу запізнювання слідкуючого приводу, диференційний пристрій, вихід якого з'єднаний з входом розмножувального пристрою, датчик азимутального положення, вихід якого з'єднаний з входом суматора, яка відрізняється тим, що в неї введені пропорційний регулятор та інтегральна ланка, до входу пропорційного регулятора підключений вихід датчика азимутального положення, вихід пропорційного регулятора підключений до входу інтегральної ланки, вихід якої з'єднаний з входом диференційного пристрою. Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for stabilization of mobile radar detection system
Автори англійськоюSmirnova Liudmyla Ivanivna, Stoliarova Svitlana Serhiivna
Назва патенту російськоюСистема стабилизации мобильной радиолокационной системы обнаружения
Автори російськоюСмирнова Людмила Ивановна, Столярова Светлана Сергеевна
МПК / Мітки
МПК: G05D 1/00
Мітки: системі, радіолокаційної, виявлення, мобільної, стабілізації, система
Код посилання
<a href="https://ua.patents.su/4-78883-sistema-stabilizaci-mobilno-radiolokacijjno-sistemi-viyavlennya.html" target="_blank" rel="follow" title="База патентів України">Система стабілізації мобільної радіолокаційної системи виявлення</a>
Адаптивна система стабілізації космічного літального апарата
Номер патенту: 45233
Опубліковано: 26.10.2009
Автори: Бандура Іван Миколайович, Вировець Аліна Володимирівна
МПК: B64G 1/24
Мітки: адаптивна, літального, стабілізації, апарата, космічного, система
Формула / Реферат:
Адаптивна система стабілізації космічного літального апарата, яка має датчик кута, вихід якого під'єднаний до першого входу блока керування, датчик кутової швидкості, вихід якого під'єднаний до другого входу блока керування, а вихід блока керування через блок підсилювачів потужності підключений до релейних виконавчих органів, яка відрізняється тим, що в неї введені блок визначення збурюючого моменту, вихід якого під'єднаний до четвертого...
Адаптивна система стабілізації космічного літального апарата

Номер патенту: 46189
Опубліковано: 10.12.2009
Автори: Демидова Вікторія Олександрівна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: система, космічного, стабілізації, апарата, літального, адаптивна
Формула / Реферат:
Адаптивна система стабілізації космічного літального апарата, яка містить датчик кута, вихід якого з'єднаний з першим входом блока керування, датчик кутової швидкості, вихід якого з'єднаний з другим входом блока керування, вихід блока керування через блок підсилювачів потужності з'єднаний з релейним виконавчим органом, яка відрізняється тим, що в неї введений блок визначення мінімального керуючого імпульсу, вхід якого з'єднаний з виходом...
Система керування функціональними режимами радіолокаційної станції
Номер патенту: 30978
Опубліковано: 25.03.2008
Автори: Челпанов Артем Володимирович, Вовк Олександр Іванович, Шматков Сергій Ігорович, Карлов Володимир Дмитрович
МПК: G01S 13/52
Мітки: система, радіолокаційної, станції, режимами, керування, функціональними
Формула / Реферат:
Система керування функціональними режимами радіолокаційної станції (РЛС), що містить вузол обробки інформації, вузол керування ресурсами РЛС та вузол керування режимом супроводу у складі послідовно включених блока класифікації, блока розподілу заявок на супровід цілей і блока оцінки потрібної енергії, яка відрізняється тим, що додатково введені: послідовно з'єднані блок оцінки інтенсивності потоку цілей і блок групування цілей, послідовно...
Система стабілізації безпілотного літального апарата
Номер патенту: 29140
Опубліковано: 10.01.2008
Автори: Литвиненко Денис Володимирович, Симонов Володимир Федорович, Паніна Алла Володимирівна
МПК: G05D 1/03
Мітки: безпілотного, система, стабілізації, апарата, літального
Формула / Реферат:
Система стабілізації безпілотного літального апарата, яка містить порівнювальний пристрій, що має електричний зв'язок з першим входом пристрою керування, вихід якого з'єднаний з інтегруючою ланкою, вихід якої з'єднаний з першим входом другого блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з другим входом першого блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, виходи блоків...
Система стабілізації безпілотного літального апарата
Номер патенту: 65285
Опубліковано: 25.11.2011
Автори: Льовкін Сергій Генадійович, Кописов Олег Едуардович, Субота Анатолій Максимович
МПК: B64C 13/00
Мітки: апарата, стабілізації, система, безпілотного, літального
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить послідовно з'єднані обчислювач, підсилювач, рульову машину, орган управління та датчик кута, датчик кутової швидкості, яка відрізняється тим, що містить задатчик, вихід якого з'єднаний з входом обчислювача, вихід рульової машини одночасно з'єднаний з входом органа управління і через перший перетворювач з'єднаний з входом адаптивного контура, а вихід органа управління з'єднаний...
Попередній патент: Спосіб визначення фотоактивних центрів в кристалічних матеріалах
Наступний патент: Теплопередавальний двофазний контур
Випадковий патент: Інструмент або виріб з багатошаровим наномасштабним покриттям