Система стабілізації безпілотного літального апарата
Номер патенту: 65285
Опубліковано: 25.11.2011
Автори: Льовкін Сергій Генадійович, Кописов Олег Едуардович, Субота Анатолій Максимович

Формула / Реферат
Система стабілізації безпілотного літального апарата, що містить послідовно з'єднані обчислювач, підсилювач, рульову машину, орган управління та датчик кута, датчик кутової швидкості, яка відрізняється тим, що містить задатчик, вихід якого з'єднаний з входом обчислювача, вихід рульової машини одночасно з'єднаний з входом органа управління і через перший перетворювач з'єднаний з входом адаптивного контура, а вихід органа управління з'єднаний з літальним апаратом, перший і другий виходи якого через датчик кута і датчик кутової швидкості відповідно з'єднані з першим і другим входами попереднього обчислювача, перший і другий виходи адаптивного контура через другий і третій перетворювачі відповідно з'єднані з третім і четвертим входами попереднього обчислювача, перший і другий виходи якого з'єднані з обчислювачем.
Текст
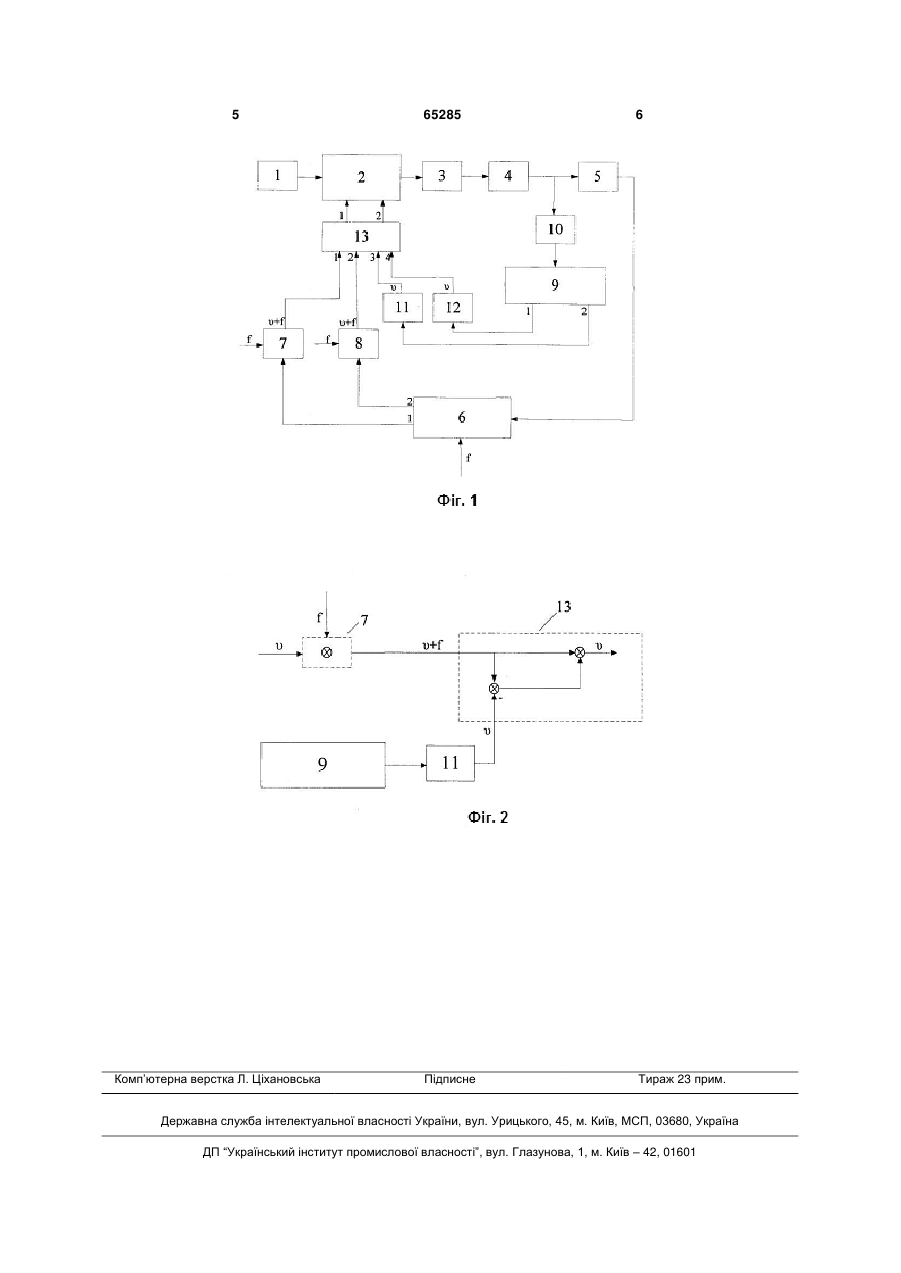
Система стабілізації безпілотного літального апарата, що містить послідовно з'єднані обчислювач, підсилювач, рульову машину, орган управління та датчик кута, датчик кутової швидкості, яка 3 входом рульової машини, вихід якої одночасно з'єднаний з входом органа управління і через перший перетворювач з'єднаний з входом адаптивного контура, а вихід органа управління з'єднаний з літальним апаратом, перший і другий виходи якого через датчик кута і датчик кутової швидкості відповідно з'єднані з першим і другим входами попереднього обчислювача, перший і другий виходи адаптивного контуру через другий і третій перетворювач відповідно з'єднані з третім і четвертим входами попереднього обчислювача, перший і другий виходи якого з'єднані з обчислювачем. Таким чином, введення в зворотній зв'язок адаптивного контура, який не підлягає впливу зовнішніх збурень, а також попереднього обчислювача згідно з алгоритмом виключення впливів збурень та похибок датчиків кута і кутової швидкості дозволяє значно підвищити точність системи кутової стабілізації безпілотного літального апарата. На фіг.1 зображена загальна функціональна схема системи кутової стабілізації безпілотного літального апарата, на фіг.2 приведена логічна схема функціонування попереднього обчислювача відключення впливу завад на вихідний сигнал датчика кута, наприклад, тангажа. Система стабілізації безпілотного літального апарата містить задатчик 1, в якості якого використовується програма управління польотом, обчислювач 2, підсилювач 3, рульова машина 4, орган управління 5, в якості якого використовуються руль висоти, курсу або елерони в залежності від каналу стабілізації, літальний апарат 6, датчик кута 7, датчик кутової швидкості 8, адаптивний контур 9, перший перетворювач 10, другий перетворювач 11, третій перетворювач 12, попередній обчислювач 13. Вихід задатчика 1 з'єднаний з входом обчислювача 2. Вихід обчислювача 2 через підсилювач 3 і рульову машину 4 з'єднаний з органом управління 5, вихід якого з'єднаний з літальним апаратом 6. Перший та другий виходи літального апарата відповідно через датчик кута 7 і датчик кутової швидкості 8 з'єднані с першим та другим входами попереднього обчислювача 13. Вихід рульової машини 4 через перший перетворювач 10 з'єднаний з входом адаптивного контура 9, перший та другий виходи якого відповідно через другий 11 і третій 12 перетворювачі з'єднані з третім та четвертим входами попереднього обчислювача 13, перший та другий виходи якого з'єднані з входами обчислювача 2. Принцип дії системи стабілізації безпілотного літального апарата розглянемо на прикладі системи кутової стабілізації по тангажу и. У залежності від програми польоту в обчислювач 2 від задатчика 1 поступає сигнал, пропорційний заданому 65285 4 значенню кута тангажа 3 . На виході обчислювача 2 виробляється сигнал управління згідно з законом: i упр k ( 3 ) k , (2) , виробляються з виходів датчиде сигнали і ків кута 7 і датчика кутової швидкості 8. Після підсилення в підсилювачі 3, сигнал управління за допомогою рульової машини 4 змінює положення рульового органу 5. У даному випадку - це руль висоти. Під дією аеродинамічного моменту Mz , що обумовлений поворотом руля висоти літальний апарат 6 починає обертатися навколо поперечної осі Z з кутовою швидкістю z і після перехідного режиму займає кутове положення 3 . Однак оскільки датчики кута 7 і кутової швидкості 8 закріплені на корпусі літального апарата 6, то їх чутливі елементи сприймають усі збурення і коливання його корпусу. Таким чином у вихідних сигналах датчиків 7 і 8 з'являються відповідні похибки: (3) f i f , З метою знешкодження похибок система охоплена зворотнім зв'язком з адаптивним контуром, принцип дії якого пояснюється на фіг.2. Так, наприклад, якщо з виходу датчика кута знімається сигнал, пропорційний f , то з виходу, з'єднаного з другим виходом адаптивного контура 9 знімається сигнал, пропорційний куту . Згідно з алгоритмом дії попереднього обчислювача 13 на його першому виході, формується сигнал, пропорційний ( f ) ( f ) , (4) Аналогічно на другому виході попереднього обчислювача сформується сигнал: ( f ) ( f ) , (5) Таким чином, відхилення рульової машини 4 на величину pп здійснюється згідно з формулою (1) без впливу збурень і похибок, що значно підвищує точність стабілізації за вибраним каналом (крену, курса або тангажа). При цьому динаміка адаптивного контура 9 відповідає ідеальній характеристиці літального апарата, а вихідний вал рульової машини 4 має достатньо велику жорсткість, що не дозволяє передавати коливання корпусу ЛА на орган управління 5. При таких умовах перший 10, другий 11 і третій 12 перетворювачі не підлягають впливу збурень і похибок, а їх вихідні сигнали служать у якості еталонних як основи функціонування цієї системи і забезпечення високої точності і якості системи стабілізації. 5 Комп’ютерна верстка Л. Ціхановська 65285 6 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюStabilization system of pilotless vehicle
Автори англійськоюSubota Anatolii Maksymovych, Liovkin Serhii Henadiiovych, Kopysov Oleh Eduardovych
Назва патенту російськоюСистема стабилизации беспилотного летательного аппарата
Автори російськоюСубота Анатолий Максимович, Левкин Сергей Геннадьевич, Кописов Олег Эдуардович
МПК / Мітки
МПК: B64C 13/00
Мітки: літального, апарата, безпілотного, система, стабілізації
Код посилання
<a href="https://ua.patents.su/3-65285-sistema-stabilizaci-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система стабілізації безпілотного літального апарата</a>
Відмовостійка система кутової стабілізації безпілотного літального апарата
Номер патенту: 63176
Опубліковано: 26.09.2011
Автори: Бойко Євгенія Анатоліївна, Симонов Володимир Федорович
МПК: G05D 1/03
Мітки: відмовостійка, апарата, літального, система, безпілотного, кутової, стабілізації
Формула / Реферат:
Відмовостійка система кутової стабілізації безпілотного літального апарата, що містить задавальний пристрій, вихід якого з'єднаний з першим входом першого суматора, вихід якого з'єднаний з регулятором, вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з сервоприводом, вихід якого з'єднаний з безпілотним літальним апаратом, дані про кут тангажа та кутову швидкість подаються на датчик кута тангажа та датчик кутової...
Система стабілізації безпілотного літального апарата
Номер патенту: 29140
Опубліковано: 10.01.2008
Автори: Литвиненко Денис Володимирович, Паніна Алла Володимирівна, Симонов Володимир Федорович
МПК: G05D 1/03
Мітки: система, літального, апарата, стабілізації, безпілотного
Формула / Реферат:
Система стабілізації безпілотного літального апарата, яка містить порівнювальний пристрій, що має електричний зв'язок з першим входом пристрою керування, вихід якого з'єднаний з інтегруючою ланкою, вихід якої з'єднаний з першим входом другого блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з другим входом першого блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, виходи блоків...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Величко Надія Вікторівна, Бандура Іван Миколайович, Симонов Володимир Федорович
МПК: G05D 1/03, B64C 13/00
Мітки: апарата, система, літального, безпілотного, стабілізації
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Антошик Вікторія Миколаївна, Симонов Володимир Федорович, Амелін Сергій Вікторович
МПК: B64C 13/00, G05D 1/03
Мітки: стабілізації, система, апарата, літального, безпілотного
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Система стабілізації бокового каналу безпілотного літального апарата
Номер патенту: 36498
Опубліковано: 27.10.2008
Автори: Жалніна Вікторія Василівна, Бондар Катерина Михайлівна, Амелін Сергій Вікторович
МПК: G05D 1/03
Мітки: безпілотного, система, бокового, каналу, літального, стабілізації, апарата
Формула / Реферат:
Система стабілізації бокового каналу безпілотного літального апарата, що містить перший та другий порівнювальні пристрої, електронні ключі, сервопривід, вихід якого з'єднаний з входом об'єкта керування, а вхід - з виходом першого блока формування керуючих сигналів, датчик кута та датчик кутової швидкості, які послідовно з'єднані з виходами об'єкта керування, яка відрізняється тим, що до її складу введені нормуючі підсилювачі, входи яких...
Попередній патент: Чотириканальний розподільник періодичної послідовності пачок імпульсів з перенастроюваним періодом, тривалістю і кількістю імпульсів в пачці
Наступний патент: Спосіб накладання панкреатоєюноанастомозу при хірургічному лікуванні пухлин органів біліопанкреатодуоденальної зони
Випадковий патент: Фрикційний демпфер