Спосіб акустичного зондування атмосфери
Номер патенту: 79528
Опубліковано: 25.06.2007
Автори: Карташов Володимир Михайлович, Васильченко Андрій Олександрович
Формула / Реферат
Спосіб акустичного зондування атмосфери, який полягає у попередньому аналізі за напрямками акустичних перешкод, випромінюванні до атмосфери акустичних синусоїдальних коливань у напрямку, на якому рівень сигналу перешкод має найменше значення, прийомі акустичних коливань, розсіяних на природних неоднорідностях атмосфери, вимірі параметрів розсіяного сигналу, обчисленні параметрів атмосфери за виміряними значеннями параметрів розсіяного сигналу, який відрізняється тим, що попередньо виконують аналіз спектральної щільності потужності сигналів від акустичних перешкод для кожного з напрямків в межах вибраного сектора огляду і визначають напрямки та частоти, при яких рівень сигналу перешкод має найменше значення, потім випромінюють зондувальні акустичні сигнали на цій частоті у вибраному напрямку.
Текст
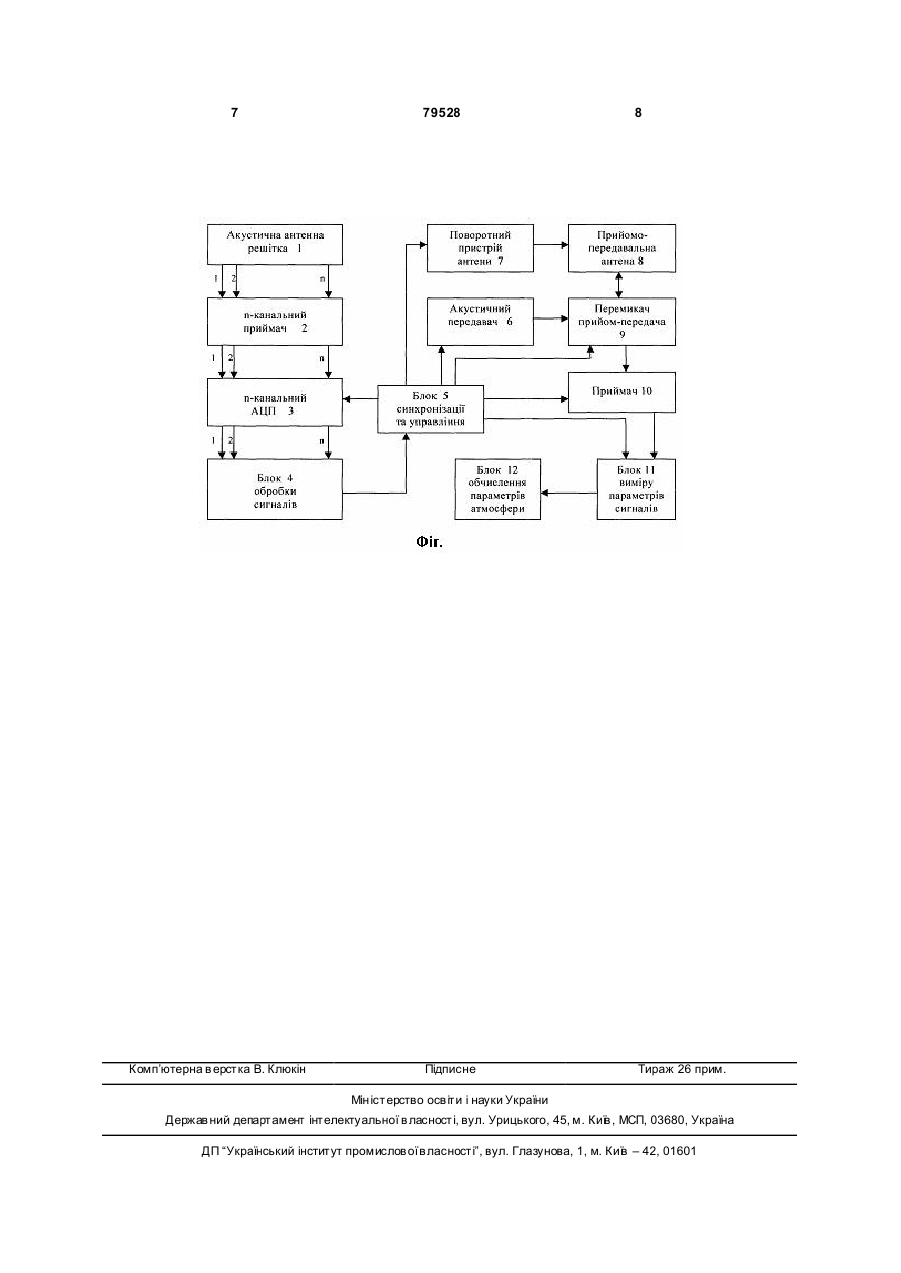
Спосіб акустичного зондування атмосфери, який полягає у попередньому аналізі за напрямками акустичних перешкод, випромінюванні до атмосфери акустичних синусоїдальних коливань у напрямку, на якому рівень сигналу перешкод має найменше значення, прийомі акустичних коливань, розсіяних на природних неоднорідностях атмосфери, вимірі параметрів розсіяного сигналу, обчисленні параметрів атмосфери за виміряними значеннями параметрів розсіяного сигналу, який відрізняє ться тим, що попередньо виконують аналіз спектральної щільності потужності сигналів від акустичних перешкод для кожного з напрямків в межах вибраного сектора огляду і визначають напрямки та частоти, при яких рівень сигналу перешкод має найменше значення, потім випромінюють зондувальні акустичні сигнали на цій частоті у вибраному напрямку. Винахід відноситься до метеорології, а саме до акустичних засобів визначення параметрів атмосфери, і може бути використаний при метеорологічному забезпеченні зльоту й посадки літаків, а також при прогнозуванні метеорологічних ситуацій, які приводять до підвищеної концентрації забруднень у прикордонному шарі атмосфери. Відомим є спосіб виміру параметрів атмосфери по куту приходу розсіяної хвилі [Красненко Н. П. Акустическое зондирование атмосферы, Новосибирск, Наука, 1986, с. 108-112], заснований на випромінюванні в атмосферу акустичних коливань, розсіянні акустичних коливань на неоднорідностях атмосфери і прийомі розсіяного сигналу. Параметри атмосфери визначають за результатами виміру параметрів розсіяного сигналу. Тут фактично вимірюється середня різниця фаз сигналів, які реєструються в різних точках апертури антени, а кут приходу хвилі оцінюється з формули, де величина середньої різниці фаз виражена як функція від метеопараметрів атмосфери. Приведена формула при моностатичній схемі зондування. До недоліків способу відноситься те, що вимірювання різниці фаз сигналів акустичним локатором дозволяють оцінити за пеленгаційною формулою кут приходу хвилі тільки з точністю першого наближення за ступенем збурення показника заломлення. Тобто, даний спосіб не має достатньо високої точності виміру параметрів атмосфери внаслідок сильного впливу зовнішнього шумового поля. Відомий також акустичний доплерівский спосіб визначення швидкості вітру [Красненко Н. П. Акустическое зондирование атмосферы, Новосибирск, Наука, 1986, с. 105-108]. Він полягає у випромінюванні до атмосфери акустичних коливань з деякою фіксованою частотою f в довільно вибраному напрямку, прийомі акустичних коливань, розсіяних на природних неоднорідностях атмосфери, які рухаються під впливом вітру, вимірі доплерівського зрушення частоти розсіяного сигналу та обчисленні швидкості вітру. Якщо випромінювання та прийом коливань здійснюється з однієї точки, то швидкість вітру обчислюється згідно з формулою c V= fд (1) 2fи де с - швидкість звуку; fд=fп-f и - доплерівский зсув частоти; fп -центральна частота сигналу, що (19) UA (11) 79528 (13) C2 (21) a200507579 (22) 29.07.2005 (24) 25.06.2007 (46) 25.06.2007, Бюл. № 9, 2007 р. (72) Васильченко Андрій Олександрович, Карташов Володимир Михайлович (73) ХАРКІВСЬКИЙ НАЦІОН АЛЬНИЙ УНІВЕРСИТЕТ РАДІОЕЛЕКТРОНІКИ (56) Красненко Н.П. Акустическое зондирование атмосферы.- Новосибирск: Наука, 1986.-С.104-113 UA 46160, 15.05.2002 UA 52715, 15.01.2003 SU 1215505, 15.02.1993 SU 1173367, 15.08.1085 RU 2152055, 27.06.2000 WO 9949332, 30.09.1999 US 4286462, 01.09.1981 JP 2001141458, 25.05.2001 3 79528 приймається; fи - частота коливань які випромінюються. При цьому визначається радіальна складова швидкості вітру. Для визначення повного вектора швидкості вітру V проводять вимірювання його радіальних складових V1 , V2, V3 у трьох різних напрямах (Красненко Н.П. Акустическое зондирование атмосферы, Новосибирск, Наука, 1986,с.106-108). Основним фактором, який обмежує точність вимірювання швидкості вітру і максимальну дальність дії розглядуваного способу, є вплив зовнішніх акустичних перешкод. Шумові джерела, як правило, не одиничні і розподілені по кутах. Як характеристики такого випромінювання використовуються: інтенсивність І, Вт/см 2 (або звуковий тиск), а також куто-спектральна інтенсивність Β(θ,φ,f), Вт/(см 2. Гц ср.), яка визначає потужність хвилі, що приходить з напряму (θ, φ), з частотою f, віднесену до одиниці площі антени, одиниці частотного інтервалу і тілесного кута. Куто вий і частотний розподіл потужності випромінювання різний для кожної конкретної ситуації [Красненко Н.П. Акустическое зондирование атмосферы, Новосибирск, Наука, 1986, с. 38-40], при цьому відомо, що у загальному випадку розподіл характеризується значною нерівномірністю (максимальні значення шуму можуть досягати 100..140дб.). Найбільш близьким по технічній суті й вирішуваній задачі до пропонованого винаходу є спосіб акустичного зондування атмосфери [патент України №46160 МПК 6 G01W1/00 опубл. 15.05.2002, бюл. №5 2002р.], який полягає у випромінюванні в атмосферу в довільно вибраному напрямку акустичних синусоїдальних коливань, прийомі акустичних коливань, розсіяних на природних неоднорідностях атмосфери, вимірі параметрів розсіяного сигналу, обчисленні параметрів атмосфери по виміряних значеннях параметрів розсіяного сигналу, згідно якому попередньо виконують аналіз розподілу за напрямками зовнішніх акустичних перешкод в межах вибраного сектора огляду, визначають напрямок, на якому рівень перешкод має найменше значення, і випромінюють в цьому напрямку зондувальні акустичні коливання. До недоліків способу відноситься те, що при виборі несучої частоти зондувального сигналу не враховується нерівномірність спектральної щільності потужності перешкод. Тобто в даному способі несуча частота вибрана не оптимально. До основи винаходу поставлена задача підвищення дальності зондування і точності виміру параметрів атмосфери за рахунок вибору таких параметрів зондування як: напрямки зондування θ, φ, і частоти зондування f, для яких рівень зовнішніх перешкод є найменшим. Ця задача вирішена таким чином. У способі акустичного зондування атмосфери, який полягає у попередньому аналізі за напрямками акустичних перешкод, випромінюванні до атмосфери акустичних синусоїдальних коливань у напрямку на якому рівень перешкод має наименьше значення, прийомі акустичних коливань, розсіяних на природних неоднорідностях атмосфери, вимірі параметрів розсіяного сигналу, обчисленні параметрів атмос 4 фери по виміряних значеннях параметрів розсіяного сигналу, згідно винаходу попередньо виконують аналіз спектральної щільності потужності акустичних перешкод для кожного з напрямків в межах вибраного сектора огляду і визначають напрямки та частоти, при яких рівень перешкод має найменше значення, потім випромінюють зондувальні акустичні сигнали на цій частоті у вибраному напрямку. Рівень та розподіл за напрямками і частоті зовнішніх акустични х перешкод характеризуються значною мінливістю, яка зумовлена, головним чином, змінами в домінуючих джерелах шумів і умовами розповсюдження звукових хвиль. Спектральна щільність потужності зовнішніх перешкод на вході приймача визначається виразом: N 0 (q0, j0 , f0 ) = S × òòò F (q, j, f , q0 , j 0, f0 ) × (2) × B(q, j, f )× dq × dj × df де, θ, φ - відповідно кут місця і азимут; f - частота; θ0, φ 0 - значення кутів які визначають положення максимуму головної пелюстки діаграми спрямованості антени акустичного локатора (які визначають напрям зондування); F(θ, φ, f, θ0, φ0, f0) - функція спрямованості прийомо-передавальної антени в плоскості простору і частоти (при f=f0 відповідає діаграмі спрямованості прийомопередавальної антени); f0 – частота настройки приймача; S - ефективна площа апертури антени; Як видно з (2) якщо напрям і частоту зондування вибрати так, щоб у точці θ0, φ0, f0 спостерігався мінімум функції Β(θ,φ,f), то це забезпечить мінімум спектральної щільності перешкод на вході приймача і отже, випромінювання зондувального сигналу на вибраній частоті й напрямку з найменшим рівнем спектральної щільності перешкод дозволяє підвищити ймовірність задовільної (за умовами перешкод) роботи і суттєво поліпшити реальну чутливість системи. Для оцінки, у конкретній обстановці, коли є перешкоди, функції B(θ,φ,f), яка характеризує спільний кутовий і частотний розподіл перешкод, може бути використаний спектральний аналіз часової функції поля, яке спостерігається в апертурі плоскої антенної решітки, у той час коли випромінювання зондувального сигналу не здійснюється. У цьому випадку при прийомі на частоті f1 коливань перешкоди від деякого шумового джерела, який характеризується напрямком θ1, φ1, просторові частоти k x1 k x1 поля, яке спостерігається в апертурі решітки, уздовж відповідних направлень х, у горизонтальної плоскості, являються функціями кутів θ1, φ1 та частоти f 1 1 1 k x1 = sin 1× cosj1 k y1 = q sinq1 × sinj1 (3) l1 l1 де λ1 - довжина хвилі, яка відповідає частоті f1. Поле U(x,y,t), яке утворюється в апертурі антени внаслідок дії декількох джерел перешкод, являється адитивною сумішшю відповідних коливань перешкод. Трьохмірне перетворення Фур'є від поля U(x,y,t), яке спостерігається, дозволяє отримати його просторово-частотний спектр 5 B(k x , k y , f ) = 1 8 × p3 79528 U( x, y, t ) × òòò - j2p(x ×k x + y ×k y ) ×e × dx × dy × dt (4) Для отримання шуканої функції кутового розподілу Β(θ,φ,f), необхідно виконати перетворення координат ky l ×ky (5) j = arctg q = arcsin kx sinj Рельєф функції Β(θ,φ,f) такий, що в точках, які відповідають напрямкам і частотам джерел перешкод спостерігаються локальні максимуми. Значення, θ, φ, f які відповідають глобальному мінімуму (або декільким локальним мінімумам) функції Β(θ,φ,f), характеризують напрямки і частоти, які доцільно вибирати як напрямки і частоти зондування, з погляду рівня перешкод. Таким чином, визначення напрямків і частот, таких що відповідають найменшому рівню зовнішніх перешкод і виконання зондування в цих напрямках і частотах дозволить суттєво поліпшити реальну чутливість приймача і підвищити ймовірність задовільної (за умовами перешкод) роботи акустичного локатора у складній обстановці перешкод. На фігурі представлена структурна схема пристрою, який реалізує запропонований спосіб. Пристрій містить приймальну акустичну антенну решітку 1, яка містить n = Nx × Ny елементів, вихідні сигнали елементів решітки подаються на входи каналів п-канального приймача 2, з виходів каналів приймача сигнали подаються на входи n-канального аналого-цифрового перетворювача (АЦП) 3, далі вихідні сигнали АЦП передаються до блоку обробки сигналів 4, вихід якого пов'язаний з входом блоку 5 синхронізації та управління, один вихід блоку 5 синхронізації та управління пов'язаний з акустичним передавачем 6, другий - з поворотним пристроєм 7 антени, вихід якого пов'язаний з входом прийомо-передавальної антени 8, яка приєднана до перемикача 9 прийомпередача, один вхід якого з'єднаний з виходом акустичного передавача 6, другий - з блоком 5 синхронізації та управління, а вихід перемикача 9 прийом-передача, з'єднаний з входом вузькосмужного приймача 10, вхід якого пов'язаний з виходом блоку 5 синхронізації та управління, а вихід із входом блоку 11 виміру параметрів сигналів, другий вхід якого з'єднаний з виходом блоку 5 синхронізації та управління, а вихід пов'язаний з входом блоку 12 обчислення параметрів атмосфери. Пристрій працює таким чином: Акустичні перешкоди, які опромінюють акустичну антенну решітку, створюють в ній поле розподілу рівнів звукового тиску U(x,y,t). Вихідним сигналом кожного елементу решітки 1 є напруга, миттєве значення якої пропорційно миттєвому значенню поля у відповідній точці апертури. Таким чином, реалізується дискретизація поля антени у просторі. 6 Сигнали з виходів акустичної антенної решітки потрапляють на входи n-канального приймача 2, який здійснює попереднє посилення сигналу, далі з виходів приймача сигнали поступають на входи n-канального АЦП 3, який здійснює перетворення аналогових сигналів елементів антени в цифровий код. Сигнали на виходах n-канального АЦП 3, є цифрові послідовності значень поля U(x,y,t) яке утворилось в апертурі решітки внаслідок дії перешкод, причому в кожному з n-каналів передаються значения величини поля в конкретній точці апертури решітки. Синхросигнали n-канального АЦП створюються блоком управління та синхронізації 5. По синхросигналу блоку 5 синхронізації та управління сигнали з виходів n-канального АЦП 3 передаються до блоку обробки сигналів 4, де проводиться спектральний аналіз поля U(x,y,t) і обчислюється спільний розподіл зовнішніх акустичних перешкод по напрямках і частота х. Ця інформація поступає до блоку 5 синхронізації та управління, де визначається оптимальний набір значень θ, φ, f, при яких рівень перешкод має найменше значення. Далі по сигналу з блоку 5 синхронізації та управління, поворотний пристрій антени 7, встановлює антену на оптимальний напрямок. По сигналу з блоку 5 синхронізації та управління перемикач 9 прийом-передача підключає прийомопередавальну антену 8 до акустичного передавача 6 на час випромінювання зондувального сигналу. Потім по сигналу з блоку 5 акустичний передавач 6 виробляє зондувальний імпульс з оптимальною частотою заповнення, який через перемикач 9 прийом-передача поступає в прийомопередавальну антену 8 і випромінюється в простір. Акустичний сигнал, розсіяний на неоднорідностях атмосфери, надходить до прийомо-передавальної антени 8. По сигналу з блоку 5 синхронізації та управління перемикач 9 прийом-передача підключає прийомо-передавальну антену 8 до приймача 10, для прийому розсіяних сигналів, у якому він обробляється і підсилюється. По сигналу блоку 5 синхронізації та управління, частота настройки приймача встановлюється відповідно до оптимальної частоти зондування. У блоці 11 виміру параметрів сигналу здійснюється вимір інформативних параметрів корисного сигналу (наприклад, амплітуди, доплерівської частоти) та у блоку 12 обчислення параметрів атмосфери, по зміряним значенням параметрів сигналу визначаються параметри атмосфери (наприклад, швидкість та напрямок вітру). Далі проводиться наступний вимір зовнішнього розподілу перешкод та цикл повторюється. Як бачимо на відміну від прототипу, де випромінювання і прийом коливань здійснюють в оптимальному з погляду мінімуму перешкод напрямку на довільній частоті, у запропонованому винаході як робочі вибирають не тільки напрямки але і частоти при яких рівень перешкод має найменше значення. 7 Комп’ютерна в ерстка В. Клюкін 79528 8 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for acoustic air sounding
Автори англійськоюKartashov Volodymyr Mykhailovych
Назва патенту російськоюСпособ акустического зондирования атмосферы
Автори російськоюКарташов Владимир Михайлович
МПК / Мітки
МПК: G01W 1/00
Мітки: зондування, атмосфери, акустичного, спосіб
Код посилання
<a href="https://ua.patents.su/4-79528-sposib-akustichnogo-zonduvannya-atmosferi.html" target="_blank" rel="follow" title="База патентів України">Спосіб акустичного зондування атмосфери</a>
Спосіб акустичного зондування атмосфери
Номер патенту: 52715
Опубліковано: 15.01.2003
Автор: Карташов Володимир Михайлович
МПК: G01W 1/00
Мітки: акустичного, зондування, атмосфери, спосіб
Формула / Реферат:
Спосіб акустичного зондування атмосфери, що полягає в випромінюванні в атмосферу на певній робочій частоті акустичних синусоїдальних коливань, прийомі на цій частоті акустичних коливань, розсіяних на природних неоднорідностях атмосфери, вимірі параметрів розсіяного сигналу, обчисленні параметрів атмосфери за виміряними значеннями параметрів розсіяного сигналу, який відрізняється тим, що попередньо аналізують розподіл за частотою зовнішніх...
Спосіб акустичного зондування атмосфери
Номер патенту: 46160
Опубліковано: 15.05.2002
Автори: Васильченко Андрій Олександрович, Карташов Володимир Михайлович
Мітки: спосіб, атмосфери, акустичного, зондування
Формула / Реферат:
Спосіб акустичного зондування атмосфери, який полягає у випромінюванні в атмосферу в довільно вибраному напрямку акустичних синусоїдальних коливань, прийомі акустичних коливань, розсіяних на природних неоднорідностях атмосфери, вимірі параметрів розсіяного сигналу, обчисленні параметрів атмосфери по виміряних значеннях параметрів розсіяного сигналу, який відрізняється тим, що попередньо виконують аналіз розподілу за напрямками зовнішніх...
Спосіб акустичного зондування атмосфери
Номер патенту: 50860
Опубліковано: 15.11.2002
Автори: Карташов Володимир Михайлович, Васильченко Андрій Олександрович, Риженко Олексій Іванович, Нагібін Ігор Борисович
МПК: G01W 1/00
Мітки: спосіб, атмосфери, зондування, акустичного
Формула / Реферат:
Спосіб акустичного зондування атмосфери, який полягає в випромінюванні в атмосферу акустичних коливань, прийманні акустичних коливань, розсіяних природними неоднорідностями атмосфери, у рознесених точках простору, вимірюванні доплерівських зсувів частоти розсіяних сигналів і визначенні повного вектора швидкості вітру за виміряними значеннями параметрів розсіяних сигналів, який відрізняється тим, що акустичні коливання випромінюють імпульсами...
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери
Номер патенту: 46524
Опубліковано: 15.05.2002
Автори: Дєлов Іван Акіндінович, Сліпченко Микола Іванович
МПК: G01S 13/95, G01S 13/00
Мітки: змін, акустичного, дистанційного, допомогою, температури, вимірювання, повітря, відносних, спосіб, атмосфери, зондування
Формула / Реферат:
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери, що включає випромінювання в атмосферу пакета гармонійних коливань повітря, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, який відрізняється тим, що здійснюють моностатичне зондування атмосфери вертикально чи під кутом до обрію, причому прийом розсіяних...
Спосіб дистанційного визначення типу температурної стратифікації атмосфери за допомогою акустичного зондування атмосфери
Номер патенту: 46522
Опубліковано: 15.05.2002
Автори: Сліпченко Микола Іванович, Дєлов Іван Акіндінович
МПК: G01S 13/00, G01S 13/95
Мітки: визначення, спосіб, допомогою, акустичного, атмосфери, типу, температурної, зондування, дистанційного, стратифікації
Формула / Реферат:
Спосіб дистанційного визначення типу температурної стратифікації атмосфери за допомогою акустичного зондування атмосфери, який включає випромінювання в атмосферу пакета гармонічних коливань звуку, його прийом, перетворення прийнятих звукових коливань в електричні, який відрізняється тим, що випромінювання пакета акустичних хвиль ведуть з однієї точки на місцевості в моностатичному режимі у вертикальному напрямку і під деяким кутом місця в...
Попередній патент: Пристрій для визначення коефіцієнта зчеплення колеса дорожньо-транспортного засобу з дорожнім покриттям
Наступний патент: Спосіб одержання коксу без уловлювання хімічних продуктів коксування
Випадковий патент: Клапанний скидач прокату