Пристрій для автоматизованого керування вагонним сповільнювачем
Номер патенту: 79838
Опубліковано: 25.07.2007
Автори: Снітовський Володимир Михайлович, Петровський Микола Дмитрович
Формула / Реферат
Пристрій для автоматизованого керування вагонним сповільнювачем, що містить щонайменше один датчик наявності вагона на колії, схему АБО і схему керування електропневматичним клапаном гальмування, який відрізняється тим, що схема АБО виконана у вигляді вузла контролю вмикання (ВКВ) суб'єктом керування ступеня гальмування чи розгальмовування, а схема керування електропневматичним клапаном гальмування виконана у вигляді вузла вмикання принаймні третього чи четвертого ступеня гальмування (ВВСГ) електропневматичного клапана (ЕПК) гальмування сповільнювача, причому вихід принаймні одного датчика (Д) підключений до входу принаймні одного операційного підсилювача сигналів датчика (ОПСД), а його вихід підключений до першого входу вузла вмикання напруги (ВВН), виконаного у вигляді схеми тригера, а остання другим входом підключена до першого виходу вузла контролю вмикання суб'єктом керування ступеня гальмування чи розгальмовування, а виходом підключена до входу вузла вмикання принаймні третього чи четвертого ступеня гальмування, а останній своїм першим виходом підключений до третього ступеня гальмування електропневматичного клапана гальмування сповільнювача, другим виходом підключений до четвертого ступеня гальмування електропневматичного клапана гальмування, а третім виходом підключений до першого входу блока сигналізації втрати працездатності (БСВП) суб'єкта керування; блок керування сповільнювачем (БКС) схеми керування сповільнювачем (СКС), що керується суб'єктом керування, своїми першим, другим, третім, четвертим і п'ятим виходами підключений, відповідно, до першого, другого, третього, четвертого і п'ятого входів вузла контролю вмикання суб'єктом керування ступеня гальмування чи розгальмовування, а останній своїм другим виходом підключений до другого входу блока сигналізації втрати працездатності суб'єкта керування, що своїм першим виходом підключений до входу схеми попереджувальної сигналізації (ПС), другим виходом підключений до входу схеми аварійної сигналізації (АС), третім виходом підключений до електричного гудка, а четвертим виходом підключений до входу схеми гіркового світлофора.
Текст
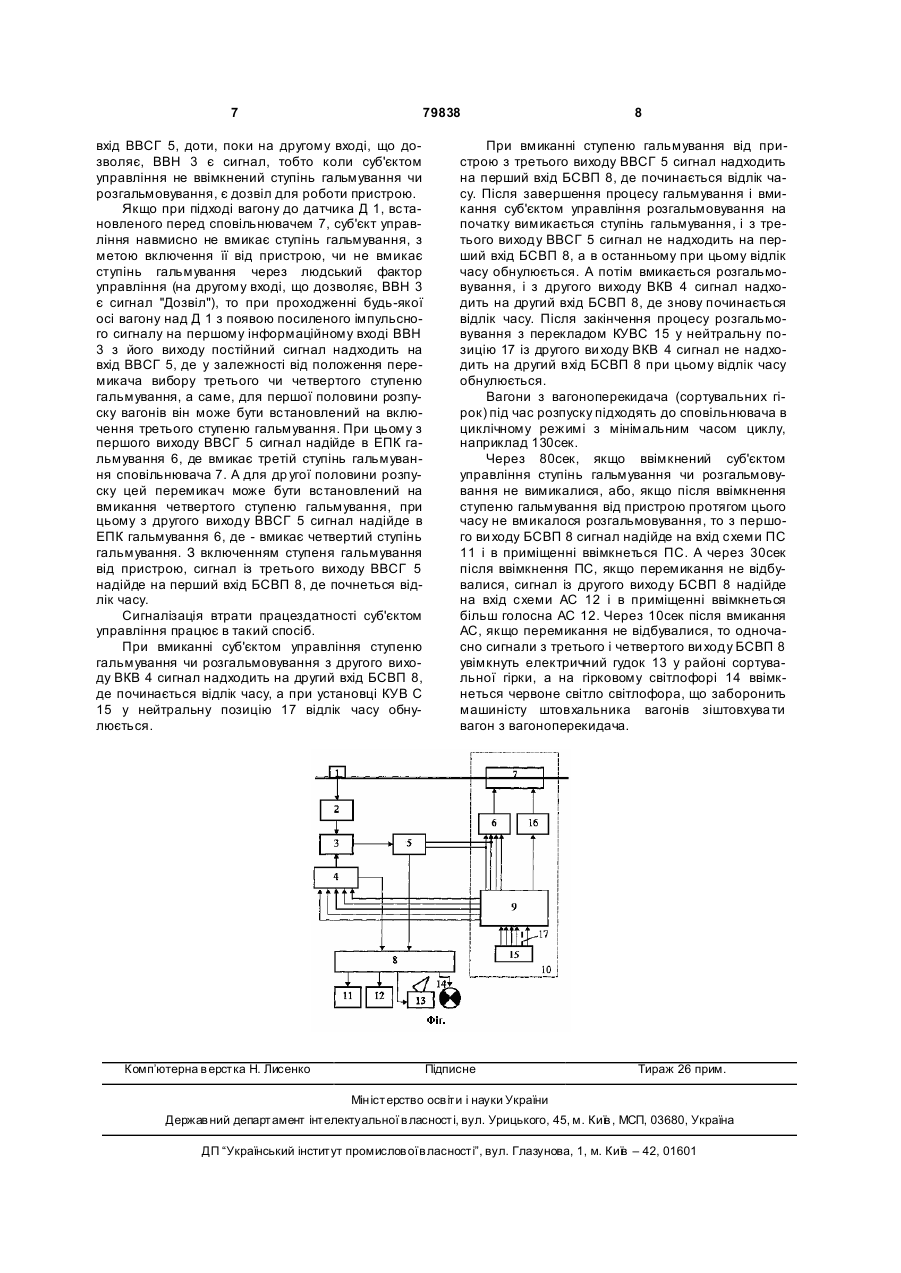
Пристрій для автоматизованого керування вагонним сповільнювачем, що містить щонайменше один датчик наявності вагона на колії, схему АБО і схему керування електропневматичним клапаном гальмування, який відрізняється тим, що схема АБО виконана у вигляді вузла контролю вмикання (ВКВ) суб'єктом керування ступеня гальмування чи розгальмовування, а схема керування електропневматичним клапаном гальмування виконана у вигляді вузла вмикання принаймні третього чи четвертого ступеня гальмування (ВВСГ) електропневматичного клапана (ЕПК) гальмування сповільнювача, причому ви хід принаймні одного датчика (Д) підключений до входу принаймні одного операційного підсилювача сигналів датчика (ОПСД), а його вихід підключений до пер C2 2 (19) 1 3 79838 після більш високої здійснюється через прискорене розгальмовування сповільнювача і після завершення процесу гальмування остаточно відгальмовують сповільнювач. А наявність іноді, принаймі, одного зовнішнього фактору призводить до того, що остаточне розгальмовування сповільнювача від пристрою відбувається чи раніше необхідного моменту часу розгальмовування, чи пізніше необхідного моменту. Передчасне розгальмовування призводить до значного перевищення швидкості виходу вагону із сповільнювача стосовно заданої швидкості, а запізніле розгальмовування приводить до зупинки вагону в сповільнювачі, або до утворення великих «вікон» на колії накопичення. Розглянемо один з аналогів [за авторським свідоцтвом СРСР №467851 М. Кл. У61L17/00 від 25.04.75]. У розглянутому пристрої значення ходових властивостей W вагону на виході вимірника ходових властивостей W не завжди бувають дійсними. Це іноді відбувається з причини виміру швидкості Vн або Vk не від перших осей, коли вихід сигналу з датчика при проходженні над ним першої осі має амплітуду нижче порогу спрацьовування, необхідного для того, щоб не здійснювалися виміри швидкостей від виникаючих перешкод у лініях зв'язку між датчиками і вимірником W. Але не дійсне значення W на виході вимірника W призводить до недійсного сигналу на виході дешифратора заданих швидкостей, що виробляє коди заданих швидкостей для кожної ділянки прослідування вагоном по гальмовій позиції і, відповідно, у пристрої вибору ступіні гальмування вибирається для кожної ділянки не необхідна ступінь гальмування, що знижує якість роботи сповільнювача від пристрою, тому воно має низьку надійність роботи. Як прототип обраний пристрій для автоматизованого управління вагонним сповільнювачем, що включає, принаймі, один датчик наявності вагону на колії, схему ИЛИ і схему управління електропневматичним клапаном гальмування [авторське свідоцтво СРСР №737279, М.Кл. В61L17/00, опубл. 30.05.80]. Однак прототип має ті ж недоліки, що й аналог, тому що визначення заданої швидкості виходу вагону зі сповільнювача в блоці завдання швидкості ви ходу вагону відбувається на підставі розрахунку W вагон у аналогічно аналогу. Прототип також має недостатню надійність роботи, яка явно виражена при вході не повністю розгальмованого вагону у ввімкнений від пристрою сповільнювач. У цьому випадку вагон у сповільнювачі різко втрачає швидкість, яка стає нижче граничної (гранична швидкість VП»1м/сек), за якої амплітуди сигналів на виході датчиків нижче граничних амплітуд спрацьовування на входах комутатора з пам'яттю, тому останній не виробляє на своєму ви ході сигнал «Дозволу рахування». Тому на другому вході схеми И відсутній сигнал і немає сигналу на ви ході схеми Й. При цьому «зависають» виходи послідовно увімкнених лічильника імпульсів дешифратора обмірюваних швидкостей, схеми ИЛИ, лічильника ступенів гальмування, дешифратора ступенів гальмування, регістра ступенів гальмування, а в схемі управління електропне 4 вматичними клапанами, внаслідок чого до повного розгальмовування залишається ввімкненою більш висока ступінь гальмування, ввімкнена від датчика, над яким швидкість вагону була вище граничної VП. Такий вагон зупиняється в сповільнювачі або відразу ж після виходу з нього. Прототип також має обмежений діапазон застосування, а саме він управляє сповільнювачем тільки типу РНЗ, що має прискорювач розгальмовування і встановлений тільки після вагоноперекидача роторного стаціонарного ВРС і не може бути застосований для управління сповільнювачами інших типів, що не мають прискорювачів розгальмовування, наприклад, Т-50, НКМ3114, та іншими, встановленими після вагоноперекидачів інших типів, наприклад, роторний пересувний чи баштовий. У прототипі відсутнє також дублювання вмикання ступеня гальмування, а також наявне обмеження у зв'язку з присутністю людського фактору управління через наявність перемикача режиму управління сповільнювачем і не має сигналізації втрати працездатності суб'єкта управління. В основу винаходу поставлена задача підвищення надійності роботи та розширення діапазону застосування автоматизованого управління різного типу вагонними сповільнювачами, встановленими на сортувальних гірках, або після будь-якого типу вагоноперекидача шляхом дублювання вмикання ступеню гальмування і виключення людського фактору управління за рахунок вмикання від пристрою заздалегідь обраного суб'єктом управління перемикачем вибору, принаймі, третього чи четвертого ступеню гальмування, принаймі, від одного датчика, встановленого перед сповільнювачем при проходженні над ним будь-якої осі вагону на будь-якій швидкості V¹0, що виключає вмикання пристрою від перешкод, які виникають в лініях зв'язку датчика й операційного підсилювача сигналів датчика. А з урахуванням зовнішніх факторів, що впливають на сповільнювач і вагон, суб'єкт управління вчасно вмикає розгальмовування, при цьому спочатку вимикається ступінь гальмування, ввімкнений від пристрою, а після цього вмикається розгальмовування сповільнювача. Поставлена задача вирішується тим, що в пристрої для автоматизованого управління вагонним сповільнювачем, що включає, принаймі, один датчик наявності вагону на колії, схему ИЛИ і схему управління електропневматичним клапаном гальмування, відповідно до винаходу, схема ИЛИ виконана у вигляді вузла контролю вмикання ВКВ суб'єктом управління ступеню гальмування чи розгальмовування, а схема управління електропневматичним клапаном гальмування виконана у вигляді вузла вмикання, принаймі, третього чи четвертого ступеню гальмування ВВСГ електропневматичного клапана ЕПК гальмування сповільнювача, причому ви хід, принаймі, одного датчика Д, підключений до входу, принаймі, одного операційного підсилювача сигналів датчика ОПСД, а його вихід підключений до першого входу вузла вмикання напруги ВВН, виконаного у вигляді схеми тригера, а остання другим входом підключена до першого виходу вузла контролю включення 5 79838 суб'єктом управління ступеню гальмування чи розгальмовування, а виходом підключена до входу вузла вмикання, принаймі, третього чи четвертого ступеню гальмування, а останній своїм першим виходом підключений до третього ступеня гальмування електропневматичного клапана гальмування сповільнювача, другим виходом підключений до четвертого ступеня гальмування електропневматичного клапана гальмування, а третім виходом підключений до першого входу блоку сигналізації втрати працездатності БСВП суб'єкта управління; блок управління сповільнювачем БУС схеми управління сповільнювачем СУС, що управляється суб'єктом управління, своїми першим, другим, третім, четвертим і п'ятим виходами підключений відповідно до першого, другого, третього, четвертого і п'ятого входів вузла контролю вмикання суб'єктом управління ступеню гальмування чи розгальмовування, а останній своїм другим виходом підключений до другого входу блоку сигналізації втрати працездатності суб'єкта управління, що своїм першим виходом підключений до входу схеми попереджувальної сигналізації ПС, другим виходом підключений до входу схеми аварійної сигналізації АС, третім ви ходом підключений до електричного гудка, а четвертим виходом підключений до входу схеми гіркового світлофора. Доведено, що нова сукупність обмежувальних ознак є причиною, а первинний технічний результат (дублювання ступеню гальмування та виключення людського фактору управління) її наслідком. У свою чергу цей первинний технічний результат є причиною, а вторинний технічний результат (підвищення надійності роботи і розширення діапазону застосування автоматизованого управління вагонними сповільнювачами) є його наслідком. Нижче винахід пояснюється на прикладі його виконання з посиланням на прикладене креслення, на Фіг. якого представлена блок-схема заявленого пристрою. Пропонований пристрій для автоматизованого управління вагонним сповільнювачем містить датчик Д 1 наявності вагону на колії; схему ИЛИ, виконану у вигляді вузла контролю вмикання ВКВ 4 суб'єктом управління ступеню гальмування чи розгальмовування, і схему управління електропневматичним клапаном гальмування, виконану у вигляді вузла вмикання третього чи четвертого ступеню гальмування ВВСГ 5 електропневматичного клапана ЕПК гальмування 6 сповільнювача 7. Вихід Д 1 підключений до входу ОПСД 2, а його вихід підключений до першого входу ВВН 3. А останній другим входом підключений до першого виходу ВКВ 4 суб'єктом управління ступеню гальмування чи розгальмовування, а виходом підключений до входу ВВСГ 5. А останній своїм першим виходом підключений до третього ступеню гальмування ЕПК гальмування 6 сповільнювача 7. Другим виходом підключений до четвертого ступеню гальмування ЕПК гальмування 6. Його третій вихід підключений до першого входу блоку сигналізації втрати працездатності БСВП 8 суб'єкта управління. Блок управління сповільнювачем БУС 9 схеми управління сповільнювачем СУС 10, що управля 6 ється суб'єктом управління, своїми першим, другим, третім, четвертим і п'ятим виходами підключений, відповідно, до першого, другого, третього, четвертого і п'ятого входів ВКВ 4 суб'єктом управління ступеню гальмування чи розгальмовування. Останній своїм другим виходом підключений до другого входу БСВП 8 суб'єкта управління, що своїм першим виходом підключений до входу схеми попереджувальної сигналізації ПС 11, другим виходом підключений до входу схеми аварійної сигналізації АС 12, третім виходом підключений до електричного гудка 13, а четвертим виходом підключений до входу схеми гіркового світлофора 14. Пропонований пристрій працює в такий спосіб. Коли суб'єктом управління, що управляє СУС 10, ключ управління вагонним сповільнювачем КУВС 15 встановлений у позицію включення будьякого ступеню гальмування, то сигнал з його першого, чи др угого, чи третього, чи четвертого ви ходу надходить відповідно на перший, чи другий, чи третій, чи четвертий вхід БУС 9. Останній видає два вихідних сигнали з першого, чи другого, чи третього, чи четвертого ви ходу і відповідний йому із шостого, чи сьомого, чи восьмого, чи дев'ятого виходу. Сигнал з першого, чи другого, чи третього, чи четвертого виходу БУС 9 надходить відповідно на перший, чи другий, чи третій, чи четвертий вхід ВКВ 4, а сигнал із шостого, чи сьомого чи восьмого, чи дев'ятого ви ходу надходить у ЕПК гальмування 6 , де вмикає перший, чи другий, чи третій, чи четвертий ступінь гальмування сповільнювача 7. Аналогічно відбувається, якщо КУВС 15 встановлений у позицію розгальмовування. З його п'ятого виходу сигнал надходить на п'ятий вхід БУС 9, а останній видає сигнали з п'ятого і десятого виходу. З п'ятого виходу БУС 9 сигнал надходить на п'я тий вхід ВКВ 4. З десятого ви ходу сигнал надходить у ЕПК розгальмовування 16 сповільнювача 7. З появою сигналу на першому, чи др угому, чи третьому, чи четвертому, чи п'ятому вході ВКВ 4, з його другого виходу сигнал надходить на другий вхід БСВП 8, де починається відлік часу. А на першому інверсному виході ВКВ 4 сигнал відсутній і на другий вхід, що дозволяє, ВВН 3 сигнал не надходить. Якщо в цей час над Д 1 проходить вісь вагона, то з виходу останнього імпульсний сигнал надходить на вхід ОПСД 2, а з його виходу посилений імпульсний сигнал надходить на перший інформаційний вхід ВВН 3, але тому що на його другому вході, що дозволяє, немає сигналу, то і на виході сигналу не буде і на вхід ВВСГ 5 сигнал не надходить, тобто вмикання суб'єктом управління ступеню гальмування чи розгальмовування забороняє працювати пристрою. Коли КУВС 15 встановлений на нейтральну позицію 17, то на першому, другому, третьому, четвертому і п'ятому входах ВКВ 4 немає вхідного сигналу і на його другому ви ході немає сигналу, а також немає сигналу на другому вході БСВП 8 і відлік часу не відбувається. На першому інверсному виході ВКВ 4 є сигнал «Дозвіл», що надходить на другий вхід, що дозволяє, ВВН 3 і при надходженні посиленого імпульсного сигналу з виходу ОПСД 2 на перший інформаційний вхід ВВН 3 з виходу останнього постійний сигнал надходить на 7 79838 вхід ВВСГ 5, доти, поки на другому вході, що дозволяє, ВВН 3 є сигнал, тобто коли суб'єктом управління не ввімкнений ступінь гальмування чи розгальмовування, є дозвіл для роботи пристрою. Якщо при підході вагону до датчика Д 1, встановленого перед сповільнювачем 7, суб'єкт управління навмисно не вмикає ступінь гальмування, з метою включення її від пристрою, чи не вмикає ступінь гальмування через людський фактор управління (на другому вході, що дозволяє, ВВН 3 є сигнал "Дозвіл"), то при проходженні будь-якої осі вагону над Д 1 з появою посиленого імпульсного сигналу на першому інформаційному вході ВВН 3 з його виходу постійний сигнал надходить на вхід ВВСГ 5, де у залежності від положення перемикача вибору третього чи четвертого ступеню гальмування, а саме, для першої половини розпуску вагонів він можебути встановлений на включення третього ступеню гальмування. При цьому з першого виходу ВВСГ 5 сигнал надійде в ЕПК гальмування 6, де вмикає третій ступінь гальмування сповільнювача 7. А для др угої половини розпуску цей перемикач може бути встановлений на вмикання четвертого ступеню гальмування, при цьому з другого виходу ВВСГ 5 сигнал надійде в ЕПК гальмування 6, де - вмикає четвертий ступінь гальмування. З включенням ступеня гальмування від пристрою, сигнал із третього виходу ВВСГ 5 надійде на перший вхід БСВП 8, де почнеться відлік часу. Сигналізація втрати працездатності суб'єктом управління працює в такий спосіб. При вмиканні суб'єктом управління ступеню гальмування чи розгальмовування з другого виходу ВКВ 4 сигнал надходить на другий вхід БСВП 8, де починається відлік часу, а при установці КУВ С 15 у нейтральну позицію 17 відлік часу обнулюється. Комп’ютерна в ерстка Н. Лисенко 8 При вмиканні ступеню гальмування від пристрою з третього виходу ВВСГ 5 сигнал надходить на перший вхід БСВП 8, де починається відлік часу. Після завершення процесу гальмування і вмикання суб'єктом управління розгальмовування на початку вимикається ступінь гальмування, і з третього виходу ВВСГ 5 сигнал не надходить на перший вхід БСВП 8, а в останньому при цьому відлік часу обнулюється. А потім вмикається розгальмовування, і з другого виходу ВКВ 4 сигнал надходить на другий вхід БСВП 8, де знову починається відлік часу. Після закінчення процесу розгальмовування з перекладом КУВС 15 у нейтральну позицію 17 із другого ви ходу ВКВ 4 сигнал не надходить на другий вхід БСВП 8 при цьому відлік часу обнулюється. Вагони з вагоноперекидача (сортувальних гірок) під час розпуску підходять до сповільнювача в циклічному режимі з мінімальним часом циклу, наприклад 130сек. Через 80сек, якщо ввімкнений суб'єктом управління ступінь гальмування чи розгальмовування не вимикалися, або, якщо після ввімкнення ступеню гальмування від пристрою протягом цього часу не вмикалося розгальмовування, то з першого ви ходу БСВП 8 сигнал надійде на вхід схеми ПС 11 і в приміщенні ввімкнеться ПС. А через 30сек після ввімкнення ПС, якщо перемикання не відбувалися, сигнал із другого виходу БСВП 8 надійде на вхід схеми АС 12 і в приміщенні ввімкнеться більш голосна АС 12. Через 10сек після вмикання АС, якщо перемикання не відбувалися, то одночасно сигнали з третього і четвертого ви ходу БСВП 8 увімкнуть електричний гудок 13 у районі сортувальної гірки, а на гірковому світлофорі 14 ввімкнеться червоне світло світлофора, що заборонить машиністу штовхальника вaгoнів зіштовхува ти вагон з вагоноперекидача. Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for automated control of car retarder
Автори англійськоюSnitovskyi Volodymyr Mykhailovych
Назва патенту російськоюУстройство для автоматизированного управления вагонным замедлителем
Автори російськоюСнитовский Владимир Михайлович
МПК / Мітки
МПК: B61L 17/00
Мітки: пристрій, сповільнювачем, керування, вагонним, автоматизованого
Код посилання
<a href="https://ua.patents.su/4-79838-pristrijj-dlya-avtomatizovanogo-keruvannya-vagonnim-spovilnyuvachem.html" target="_blank" rel="follow" title="База патентів України">Пристрій для автоматизованого керування вагонним сповільнювачем</a>
Блок керування вагонним сповільнювачем
Номер патенту: 7924
Опубліковано: 15.07.2005
Автори: Гребінник Олексій Геннадійович, Садовий Юрій Георгійович, Мандрикин Костянтин Вікторович
МПК: B61L 17/00, B61K 7/00
Мітки: сповільнювачем, керування, блок, вагонним
Формула / Реферат:
1. Блок керування вагонним сповільнювачем, що містить два блоки клапанів, вузол керування цими клапанами і регулятор тиску, при цьому кожний зі згаданих блоків клапанів містить один гальмовий і два розгальмових клапани, які складаються з корпусу з внутрішньою кришкою і штока з поршнем, а вузол керування цими клапанами зв'язаний з повітрозбірником і складається з чотирьох керуючих клапанів, який відрізняється тим, що блок керування вагонним...
Пристрій керування

Номер патенту: 65665
Опубліковано: 15.04.2004
Автори: Чигирин Олег Трохимович, Маранов Олександр Вікторович, Чигирин Юрій Трохимович
МПК: G06F 11/00
Формула / Реферат:
Пристрій керування, що складається з багаторозрядного цифрового лічильного каналу, дешифратора, схеми керування, яка включає формувач і два елементи затримки, і генератора, вихід якого з'єднано з першими входами першого багаторозрядного цифрового лічильного каналу, схеми керування і дешифратора, вихід якого з'єднано з виходом пристрою керування, вхід схеми керування через перший елемент затримки, перший формувач і другий елемент затримки...
Система автоматизованого керування насосними агрегатами
Номер патенту: 48158
Опубліковано: 15.08.2002
Автори: Шовкопляс Іван Петрович, СТЕЦКО МИХАЙЛО ГРИГОРОВИЧ
МПК: G05D 9/00, F04D 15/00
Мітки: система, керування, автоматизованого, агрегатами, насосними
Формула / Реферат:
Система автоматизованого керування насосними агрегатами, яка складається з підключеного до випрямлячів змінної напруги сигналів багатопозиційного первинного перетворювача рівня, підсилювачів постійного струму, входами з’єднаних з виходами випрямлячів змінної напруги сигналів, пристрою керування, входи якого з’єднані з виходами підсилювачів постійного струму через комутатор, виходом схеми захисту насосного агрегату від “сухого ходу” та з...
Конвеєрний пристрій
Номер патенту: 6513
Опубліковано: 16.05.2005
Автори: Мартинюк Тетяна Борисівна, Кожем'яко Андрій Вікторович, Хом'юк Віктор Вікторович
МПК: G06F 7/503
Мітки: пристрій, конвеєрний
Формула / Реферат:
Конвеєрний пристрій, який містить n входів та n комірок, крім того, і-та комірка містить блок порівняння, суматор, вузол виділення загальної частини операндів, три регістри, D-тригер, мультиплексор і блок логічних елементів І, причому перший вхід і-ої комірки з’єднаний з першим входом мультиплексора, вихід якого підключений до входу першого регістра, вихід якого з'єднаний з першим входом блока порівняння та першим входом вузла виділення...
Пристрій керування ваговим порціонним дозуванням
Номер патенту: 10917
Опубліковано: 15.12.2005
Автор: Поповкін Юрій Матвійович
МПК: G01G 13/00
Мітки: керування, пристрій, порціонним, ваговим, дозуванням
Формула / Реферат:
Пристрій керування ваговим порціонним дозуванням, що містить реверсивний лічильник, з’єднаний через дешифратор із задатчиком програми, дві логічні схеми I, схему НI, тригер пам’яті, який відрізняється тим, що він оснащений двома схемами I, реверсивним лічильником, двома схемами порівнянння, дешифратором, комутатором, задатчиками програми, трьома схемами НI, тензодатчиком, аналого-цифровим перетворювачем, по входу з’єднаним з тензодатчиком,...
Попередній патент: Спосіб диференційної діагностики екземи та атопічного дерматиту за допомогою лазерної кореляційної спектроскопії крові
Наступний патент: Перетворювач чм коливань у ам коливання
Випадковий патент: Транспортний модуль для стисненого природного газу