Спосіб вимірювання частоти та пристрій для його здійснення

Формула / Реферат
1. Спосіб вимірювання частоти, який полягає в тому, що формують перший зразковий інтервал часу та заповнюють його n імпульсами періодичної послідовності, частоту якої вимірюють, одночасно формують другий зразковий інтервал часу, фронт якого відповідає імпульсу послідовності, який з'явився відразу після початку першого зразкового інтервалу, а зріз - імпульсу, який виник відразу після закінчення першого зразкового інтервалу часу, заповнюють його m лічильними імпульсами зразкової частоти, який відрізняється тим, що зразкову частоту заповнення другого зразкового інтервалу часу та коефіцієнт ділення тактової частоти попередньо визначають згідно із значенням заданої похибки квантування, формують потрібну тактову частоту відповідним множенням або діленням попередньо визначеної зразкової частоти, лічать її імпульси, а результат вимірювання частоти визначають відповідним діленням числа імпульсів n на число імпульсів m і множенням результату на отриману тактову частоту, яка визначена відповідно до заданого значення похибки квантування.
2. Пристрій для вимірювання частоти, який містить вхідний формувач імпульсів, D-тригер, два логічних елементи І, генератор зразкової частоти, два лічильники і подільник частоти, вихід якого з'єднаний із D-входом тригера, вихід якого з'єднаний із входами першого і другого логічних елементів І, вихід другого логічного елемента І підключений до другого лічильника, вихід першого логічного елемента І підключений до першого лічильника, вихід генератора зразкової частоти з'єднаний зі входом подільника частоти, а С-вхід тригера з'єднаний з другим входом першого логічного елемента І і виходом вхідного формувача імпульсів, вхід якого є входом пристрою, а виходи першого і другого лічильників - виходами пристрою, який відрізняється тим, що містить другий керований подільник частоти та блок обчислення та керування, виконаний з можливістю задання значення похибки квантування, при цьому вихід блока обчислення та керування для задання коефіцієнта ділення під'єднаний до відповідного входу другого подільника частоти, перший вхід якого підключений до виходу генератора тактової частоти і входу першого подільника частоти, вихід другого подільника частоти під'єднаний до другого входу другого логічного елемента І, виходи двох лічильників з'єднані із входами блока обчислення та керування.
Текст
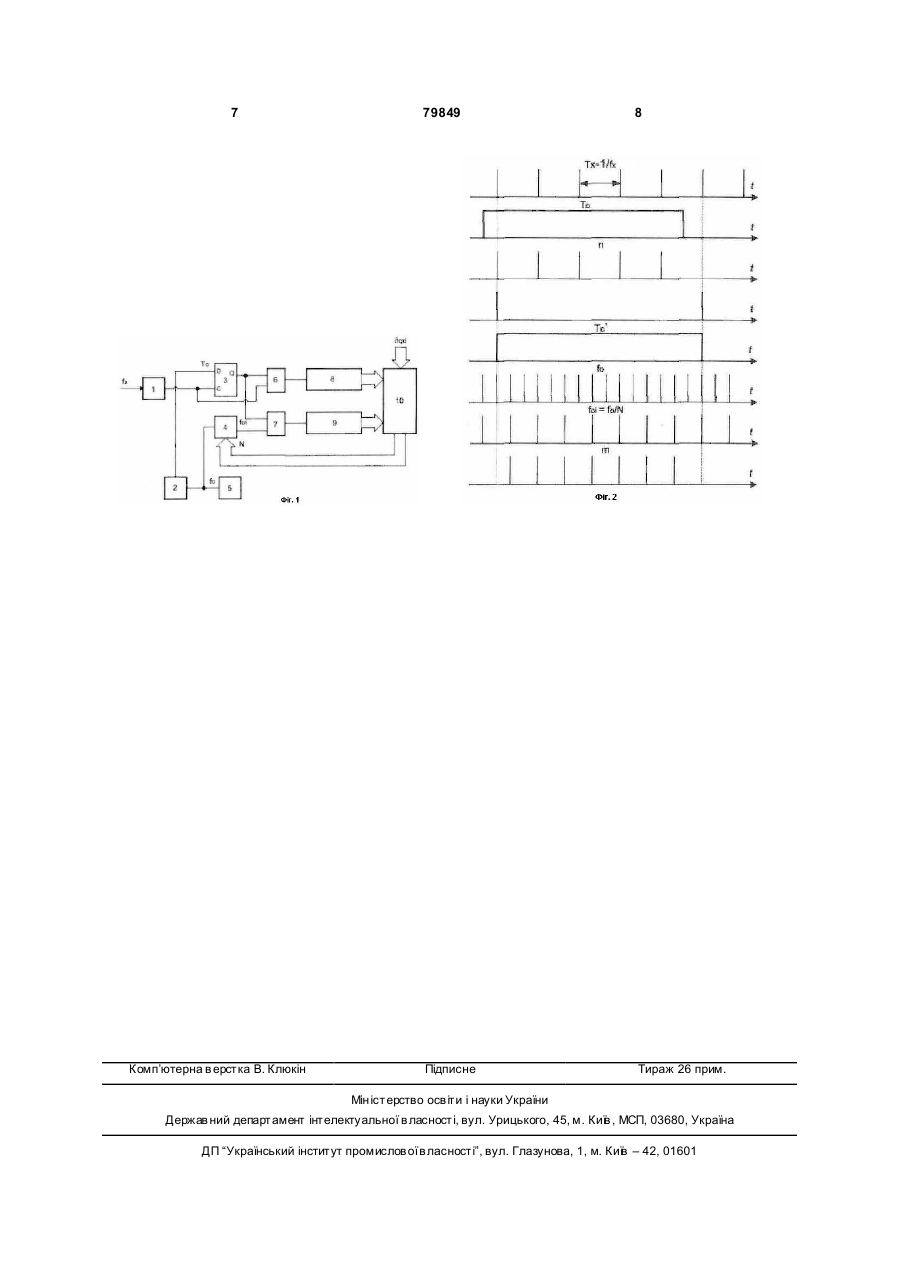
1. Спосіб вимірювання частоти, який полягає в тому, що формують перший зразковий інтервал часу та заповнюють його n імпульсами періодичної послідовності, частоту якої вимірюють, одночасно формують другий зразковий інтервал часу, фронт якого відповідає імпульсу послідовності, який з'явився відразу після початку першого зразкового інтервалу, а зріз - імпульсу, який виник відразу після закінчення першого зразкового інтервалу часу, заповнюють його m лічильними імпульсами зразкової частоти, який відрізняється тим, що зразкову часто ту заповнення другого зразкового інтервалу часу та коефіцієнт ділення тактової частоти попередньо визначають згідно із значенням заданої похибки квантування, формують потрібну тактову частоту відповідним множенням або діленням попередньо визначеної зразкової частоти, C2 2 (11) 1 3 79849 лу часу, заповнюють т лічильними імпульсами зразкової частоти. Невідома частота визначається за формулою: n (1) fx = × f0 , m де f0 - зразкова тактова частота [Мирский Г.Я. Электронные измерения. - М.: Радио и связь, 1986. - 440с.]. Однак, зразкова тактова частота, яка поруч з першим зразковим інтервалом часу безпосередньо впливає на похибку квантування, не може змінюватися в процесі вимірювання та залишається надлишковою. Відомий також пристрій для вимірювання частоти, який містить вхідний формувач, D-тригер, два логічних елемента "І", генератор зразкової частоти, два лічильника і дільник частоти, вихід якого під'єднаний до D-входу тригера, вихід якого сполучений зі входами першого і другого логічних елементів "І", вихід другого логічного елемента "І" підключений до другого лічильника, вихід першого логічного елемента "І" під'єднаний до першого лічильника, вихід генератора зразкової частоти сполучений зі входом дільника частоти, а С-вхід тригера - з другим входом першого логічного елементу "І" і виходом вхідного формувача, вхід якого є входом пристрою, а виходи першого і другого лічильників – виходами пристрою [Burr-Brown 1C Applications Handbook, LI-459, USA, 1994]. Однак, пристрій має вузькі функціональні можливості і не передбачає адаптивну зміну частоти зразкового генератора. В основу винаходу покладена задача створення способу вимірювання частоти та пристрою для його реалізації, в якому би передбачалась можливість адаптивної зміни тактової частоти зразкового генератора в залежності від умов вимірювання. Як відомо, середня динамічна споживана потужність КМОП інтегральних мікросхем розраховується за наступною формулою: 2 (2) Pav = Ceff × VDD × fclc , де Ceff - ефективна ємність мікросхеми; v[)d напруга живлення; fcic - тактова частота [Figueras J. Modeling, in Low Power Design in Deep Submicron Electronics, ed. by W.Nebel and J. Mermet, Kluwer Academic Publishers, NATO ASI Series, Vol. 337, London, 1997, pp.81-103]. Два перших множника у формулі (2) - це константи, які залежать від технології виготовлення інтегральних мікросхем. Споживана потужність також прямо пропорційна тактовій частоті. Природно, що споживана потужність може бути зменшена через зменшення тактової частоти. Однак, зменшення тактової частоти призводить до погіршення метрологічних характеристик, а саме до збільшення похибки квантування. З метою подолання цього протиріччя доцільне створення способу вимірювання частоти, який би забезпечив адаптивну зміну тактової частоти зразкового генератора в залежності від умов вимірювання та потреб зменшення споживаної потужності. Поставлена задача вирішується тим, що в способі для вимірювання частоти, який полягає в тому, що формують перший зразковий інтервал 4 часу і заповнюють n імпульсами періодичної послідовності, частоту якої вимірюють, одночасно формують другий зразковий інтервал часу, фронт якого відповідає імпульсу послідовності, який з'явився відразу після початку першого зразкового інтервалу, а зріз - імпульсу, який виник відразу після закінчення першого зразкового інтервалу часу, заповнюють m лічильними імпульсами зразкової частоти, згідно з винаходом, зразкову частоту заповнення другого зразкового інтервалу і коефіцієнт ділення тактової частоти попередньо визначають відповідно до значення заданої похибки квантування, і потрібну тактову частоту формують відповідним множенням або діленням попередньої зразкової частоти, а її імпульси лічать другим лічильником і результат вимірювання частоти отримують відповідним діленням числа імпульсів п на число імпульсів т і множенням результату на отриману тактову частоту, що формується, відповідно до заданого значення похибки квантування. Це дозволяє отримати безнадлишкову зразкову тактову часто ту шляхом адаптації зразкової тактової частоти відповідно до наперед заданої похибки квантування і тим самим зменшити споживану потужність мікроелектронних компонентів при вимірюванні частоти. Поставлена задача вирішується також тим, що в пристрої для вимірювання частоти, який містить вхідний формувач, D-тригер, два логічних елемента "І", генератор зразкової частоти, два лічильника і дільник частоти, вихід якого під'єднаний до Dвходу тригера, ви хід якого сполучений зі входами першого і другого логічних елементів "І", вихід другого логічного елемента "І" підключений до другого лічильника, вихід першого логічного елемента "І" під'єднаний до першого лічильника, вихід генератора зразкової частоти сполучений зі входом дільника частоти, а С-вхід тригера – з другим входом першого логічного елементу "І" і ви ходом вхідного формувача, вхід якого є входом пристрою, а виходи першого і другого лічильників - виходами пристрою, згідно з винаходом введені другий керований дільник частоти та блок обчислення та управління з можливістю задания значення похибки квантування, при цьому вихід задания коефіцієнта ділення блоку обчислення та управління під'єднаний до відповідного входу др угого дільника частоти, перший вхід якого підключений до виходу генератора тактової частоти і входу першого дільника частоти, вихід др угого дільника частоти під'єднаний до другого входу др угого логічного елементу "І", ви ходи дво х лічильників сполучені зі входами блоку обчислення та управління. Це дозволяє адаптивно задавати потрібну зразкову тактову часто ту у відповідності до наперед заданої похибки квантування, забезпечуючи, безнадлишковість тактової частоти і зменшення споживаної потужності інтегральних мікросхем вимірювача частоти. На Фіг.1 зображена структурна схема пристрою для реалізації способу вимірювання частоти, а на Фіг.2 - часові діаграми способу вимірювання частоти, де 1- вхідний формувач; 2, 4 - дільники частоти; 3 - D-тригер; 5 79849 5 - генератор тактової частоти; 6, 7 - логічні елементи "І"; 8, 9 - двійкові лічильники; 10 - блок обчислення та управління; fx - вимірювальна частота; T x - період вимірювальної частоти; То - перший зразковий інтервал часу; n - число імпульсів вимірювальної частоти; Тo - другий зразковий інтервал часу; f o - частота тактового генератора; foi поділена зразкова тактова частота; N – коефіцієнт ділення; m – число імпульсів зразкової частоти. Спосіб для вимірювання частоти здійснюється так. Відповідно до потрібної похибки квантування dqxi визначають зразкову тактову частоту за формулою k foi = , (3) dqx i де k - 1/Т о-const (To - перший зразковий інтервал часу). Формується перший зразковий інтервал часу To і заповнюється n імпульсами періодичної послідовності, частота f x якої вимірюється. Число n фіксується першим лічильником. Одночасно формується другий зразковий інтервал часу То', такий, що його фронт відповідає імпульсу послідовності, який з'явився відразу після початку першого зразкового інтервалу, а зріз - імпульсу, який виник відразу після закінчення першого зразкового інтервалу часу. Таким чином, тривалість другого зразкового інтервалу часу точно дорівнює цілому числу періодів сигналу. Другий зразковий інтервал часу То ' заповнюється лічильними імпульсами сформованої безнадлишкової тактової частоти foi число m яких підраховується другим лічильником. Результат вимірювання визначається за формулою: n (4) fx = × foi , m Похибка квантування не перевищує наперед задану, не залежить від вимірювальної частоти у всьому діапазоні вимірювань і визначається наступним чином: 1 dqx i = , (5) To × foi Пристрій для вимірювання частоти містить вхідний формувач 1, D-тригер З, два логічних елемента "І" 6, 7, генератор зразкової частоти 5, два лічильника 8, 9, дільник частоти 2, вихід якого під'єднаний до D-входу тригера 3, вихід якого сполучений зі входами першого і другого логічних елементів "І" 6, 7, вихід останнього підключений до другого лічильника 9, вихід першого логічного елементу "І" 6 під'єднаний до першого лічильника 8, вихід генератора зразкової частоти 5 сполучений з входом дільника частоти 2, а С-вхід тригера 3-з другим входом першого логічного елементу "І" 6 і виходом вхідного формувача 1, вхід якого є входом пристрою, а виходи першого і другого лічильників 8, 9 - виходами пристрою. Пристрій також містить другий керований дільник частоти 4 та блок обчислення та управління 10 з можливістю задания значення похибки квантування, при цьому вихід задания коефіцієнта ділення блоку обчислення та управління 10 під'єднаний до відповідного входу др уго го дільника частоти 4, перший вхід якого підключений до виходу генератора тактової 6 частоти 5 і входу першого дільника частоти 2, вихід др угого дільника частоти 4 під'єднаний до другого входу друго го логічного елементу "І" 7, виходи двох лічильників 8, 9 сполучені зі входами блоку обчислення та управління 10. Пристрій для вимірювання частоти працює так. Відповідно до потрібної похибки квантування dqxi яка задається у відповідності до умов вимірювання, блок обчислення та управління 10 розраховує потрібну зразкову тактову частоту foi та встановлює відповідний коефіцієнт ділення на вході керованого дільника частоти 4: f N= o foi Періодичний сигнал, частоту якого потрібно виміряти, подається на вхід вхідного формувача імпульсів 1, який формує послідовність прямокутних імпульсів з крутими фронтами та зрізами. Сформована імпульсна послідовність подається на тактовий С-вхід D-тригера 3, D-вхід якого стробується з виходу дільника частоти 2, який формує перший часовий інтервал То. Одночасно за допомогою логічних елементів "І" 6, 7 формується другий зразковий інтервал часу Tо , такий, що його фронт відповідає імпульсу послідовності, який з'явився відразу після початку першого зразкового інтервалу, а зріз - імпульсу, який виник відразу після закінчення першого зразкового інтервалу часу. Перший інтервал часу Тo заповнюється імпульсами вхідної частоти fx, а другий -імпульсами сформованої зразкової частоти foi, яка подається на вхід другого логічного елемента "І" 7. Ці імпульси рахуються лічильниками 8, 9 відповідно, і після закінчення другого інтервалу часу Тo’ в них відповідно накопичуються числа n і m. Після цього блок обчислення та управління 10 розраховує невідому частоту f x за формулою (4). Крім описаного пристрою вимірювання частоти, спосіб вимірювання частоти може бути дуже просто реалізований на базі мікроконтролерів сімейства MSP430 (Texas Instruments). Системна частота тактових генераторів цих мікроконтролерів може змінюватися програмним шляхом. Ця частота залежить від двох величин: fs ys tem = N × fcrystal, , (6) де N = (3¸127) - коефіцієнт множення; crystal частота кварцового резонатора (типове значення 32768Гц). Системна частота кварцового резонатора змінюється через зміну коефіцієнту множення {N-1}, якій завантажується у регістр управління системною тактовою частотою SCFQCTL [Lutz Bieri, MSP430 Metering Application Report, SLAAE10A, Te xas Instruments, USA, 1996]. Таким чином запропонований спосіб та пристрій для вимірювання частоти розширюють функціональні можливості та забезпечують безнадлишкову зразкову тактову частоту за рахунок попереднього розрахунку та формування потрібної тактової частоти у відповідності до наперед заданої похибки квантування. Це дозволяє зменшити динамічну споживану потужність мікроелектронних компонентів на один-два порядки за рахунок адаптивного управління зразковою тактовою частотою в процесі вимірювання. 7 Комп’ютерна в ерстка В. Клюкін 79849 8 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measuring frequency and a device for the realization of the method
Автори англійськоюYurish Serhii Yuriiovych
Назва патенту російськоюСпособ измерения частоты и устройство для осуществления способа
Автори російськоюЮриш Сергей Юрьевич
МПК / Мітки
МПК: G01R 23/00
Мітки: вимірювання, частоти, пристрій, спосіб, здійснення
Код посилання
<a href="https://ua.patents.su/4-79849-sposib-vimiryuvannya-chastoti-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання частоти та пристрій для його здійснення</a>
Спосіб вимірювання відношення двох частот та пристрій для його здійснення
Номер патенту: 78144
Опубліковано: 15.02.2007
Автори: Кіріанакі Микола Володимирович, Юриш Сергій Юрійович
МПК: G01R 23/00
Мітки: пристрій, вимірювання, здійснення, відношення, двох, спосіб, частот
Формула / Реферат:
1. Спосіб вимірювання відношення двох частот, який полягає в тому, що одночасно рахують імпульси обох частот, порівнюють числа імпульсів з заданим числом припинення лічби відповідно до значення заданої похибки квантування та отримують кінцевий результат за величиною зафіксованих чисел, який відрізняється тим, що одночасно рахують імпульси зразкової тактової частоти, формують два зразкових інтервали часу, що дорівнюють сумі цілого числа...
Спосіб виміру девіації частоти гармонічного сигналу та пристрій для його здійснення
Номер патенту: 35945
Опубліковано: 16.04.2001
Автори: Пивовар Олег Сергійович, Троцишин Іван Васильович
МПК: G01R 23/00, G01R 25/00
Мітки: здійснення, спосіб, пристрій, частоти, девіації, виміру, сигналу, гармонічного
Формула / Реферат:
1. Спосіб вимірювання девіації частоти, оснований на перенесенні спектру модулюючого сигналу на проміжну частоту, виділенні різницевої частоти у частотно-модульованого сигналу та визначенні числа нулів перетвореного сигналу, який відрізняється тим, що додатково вимірюють фазовий зсув між модульованим сигналом та немодульованою несучою на початку та наприкінці інтервалу виміру, що кратний половині періоду синхронно із вимірюванням кількості...
Спосіб вимірювання різниці часу затримки вузькосмугового радіосигналу з обмеженим інтервалом кореляції та пристрій для його здійснення
Номер патенту: 66378
Опубліковано: 17.05.2004
Автори: Антонюк Володимир Павлович, Клепфер Євген Іванович, Григор'єва Людмила Володимирівна
МПК: G01S 13/42, G01S 5/00, G01S 13/06
Мітки: часу, вимірювання, вузькосмугового, пристрій, обмеженим, спосіб, затримки, інтервалом, радіосигналу, різниці, кореляції, здійснення
Формула / Реферат:
1. Спосіб вимірювання різниці часу затримки вузькосмугового радіосигналу з обмеженим інтервалом кореляції, оснований на визначенні попереднього наближення різниці затримки сигналу по максимуму огинаючої взаємної кореляційної функції з подальшим уточненням результату по даних вимірювання фази в точці попереднього наближення, який відрізняється тим, що в умовах апріорної невизначеності несучої частоти сигналу, одночасно з вимірюванням фази...
Спосіб вимірювання вологості та пристрій для його здійснення
Номер патенту: 55453
Опубліковано: 15.04.2003
Автор: Рудик Андрій Вікторович
МПК: G01N 27/22, G01N 27/00
Мітки: вологості, вимірювання, спосіб, здійснення, пристрій
Формула / Реферат:
1. Спосіб вимірювання вологості, який полягає в тому, що в послідовному колі з повного ємнісного датчика вологості та зразкового ємнісного елемента вимірюють значення кута фазового зсуву між напругами на повному ємнісному датчику вологості та зразковому ємнісному елементі, який відрізняється тим, що спочатку вимірюють значення відношення напруг на повному ємнісному датчику вологості та зразковому ємнісному елементі, а потім - значення кута...
Спосіб вимірювання фазового зсуву
Номер патенту: 78146
Опубліковано: 15.02.2007
Автори: Юриш Сергій Юрійович, Кіріанакі Микола Володимирович
МПК: G01R 25/00
Мітки: спосіб, зсуву, вимірювання, фазового
Формула / Реферат:
Спосіб вимірювання фазового зсуву, який полягає в тому, що формують зразковий фіксований інтервал часу, який вибирають більшим за період самої низької частоти послідовностей, фазовий зсув між якими вимірюється, протягом цього часу вимірювання квантують часові інтервали, які пропорційні фазовому зсуву між двома імпульсними послідовностями, та лічать загальну кількість імпульсів, який відрізняється тим, що тривалість фіксованого інтервалу часу...
Попередній патент: Спосіб модуляції адгезивних властивостей мікроорганізмів
Наступний патент: Спосіб відновлення дрібнодисперсної залізної руди і відновний реактор бодрова в.в. – костюченка в.і.
Випадковий патент: Спосіб барботування рідини