Вентильний електродвигун
Номер патенту: 81970
Опубліковано: 25.02.2008
Автори: Мальований Олег Євгенович, Пищев Олександр Олексійович, Римша Віталій Вікторович, Кочерга Григорій Федорович, Хіль Петро Петрович, Радимов Ігор Миколайович, Ткачук Василь Іванович, Усачов Віктор Іванович

Формула / Реферат
Вентильний електродвигун, який містить ротор, статор, ![]() секцій якого сполучені з джерелом живлення через електронний комутатор, керувальні входи якого через пристрій затримки сполучені з давачем положення ротора, задавач і давач прискорення вихідного вала, котрі сполучені виходами з відповідними входами порівнювального пристрою, який відрізняється тим, що додатково має
секцій якого сполучені з джерелом живлення через електронний комутатор, керувальні входи якого через пристрій затримки сполучені з давачем положення ротора, задавач і давач прискорення вихідного вала, котрі сполучені виходами з відповідними входами порівнювального пристрою, який відрізняється тим, що додатково має ![]() давачів-обмежувачів струмів секцій,
давачів-обмежувачів струмів секцій, ![]() суматорів і функціональний перетворювач сигналів, який сполучений входом з виходом давача положення ротора, а
суматорів і функціональний перетворювач сигналів, який сполучений входом з виходом давача положення ротора, а ![]() виходами - з першими входами відповідних
виходами - з першими входами відповідних ![]() суматорів, сполучених другими входами з виходом порівнювального пристрою, а виходами - з керувальними входами відповідних
суматорів, сполучених другими входами з виходом порівнювального пристрою, а виходами - з керувальними входами відповідних ![]() давачів-обмежувачів струмів секцій, сполучених виходами з відповідними керувальними входами пристрою затримки, при цьому в функціональному перетворювачі для кожного суматора реалізована однозначна періодична функція
давачів-обмежувачів струмів секцій, сполучених виходами з відповідними керувальними входами пристрою затримки, при цьому в функціональному перетворювачі для кожного суматора реалізована однозначна періодична функція ![]() кутового положення ротора, кутовий період
кутового положення ротора, кутовий період ![]() якої визначається співвідношенням:
якої визначається співвідношенням:
![]() ,
,
де ![]() - кількість зубців (полюсів) ротора.
- кількість зубців (полюсів) ротора.
Текст
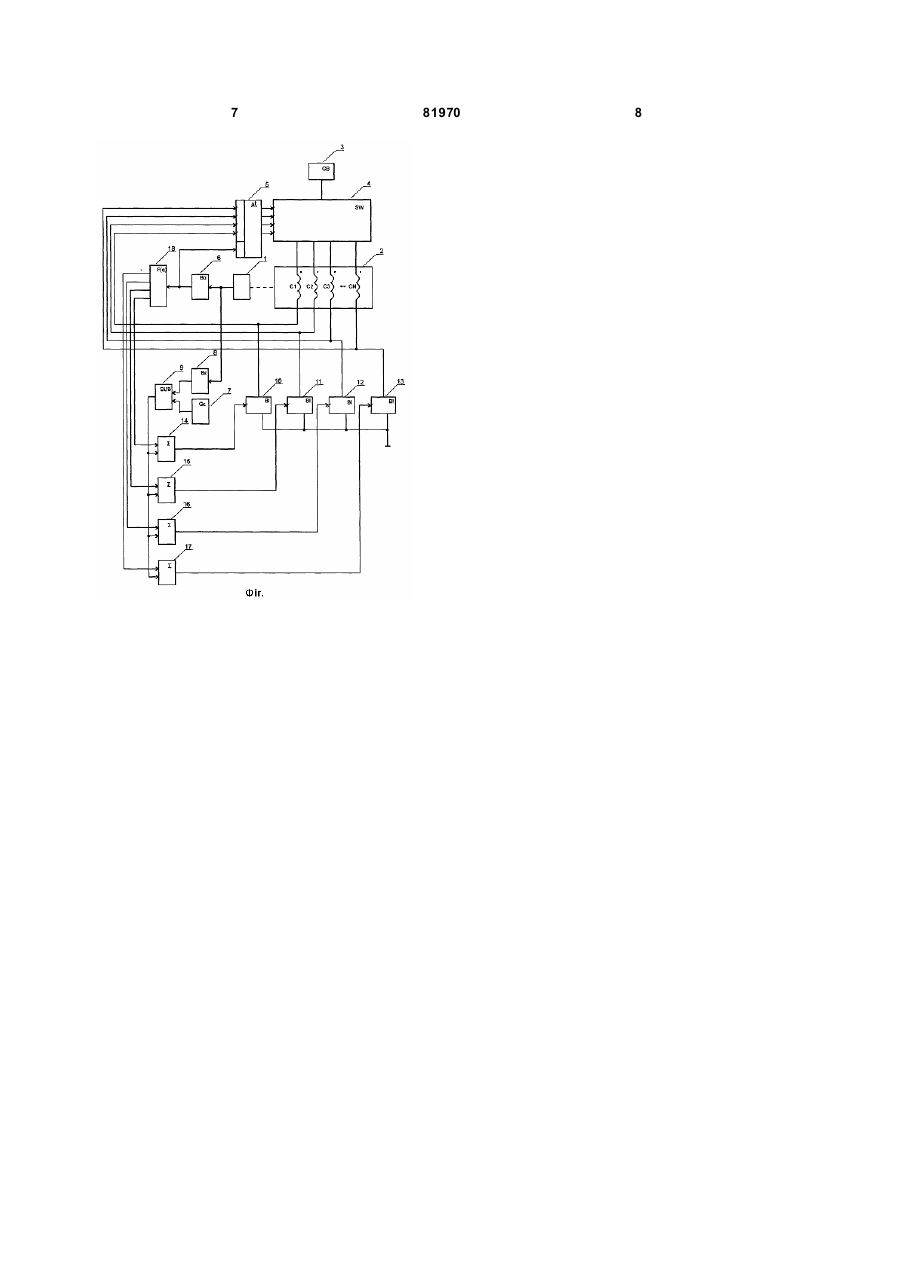
Вентильний електродвигун, який містить ротор, статор, N секцій якого сполучені з джерелом живлення через електронний комутатор, керувальні входи якого через пристрій затримки сполучені з давачем положення ротора, задавач і давач прискорення вихідного вала, котрі сполучені виходами з відповідними входами порівнювального пристрою, який відрізняється тим, що додатково має N давачів-обмежувачів струмів секцій, N суматорів і функціональний перетворювач сигналів, який сполучений входом з виходом давача положення ротора, а N виходами - з першими входами відповідних N суматорів, сполучених другими входами з виходом порівнювального пристрою, а виходами - з керувальними входами відповідних N давачівобмежувачів струмів секцій, сполучених виходами з відповідними керувальними входами пристрою затримки, при цьому в функціональному перетворювачі для кожного суматора реалізована однозначна періодична функція F(a ) кутового Запропонований винахід відноситься до електротехніки, зокрема до електродвигунів і може бути використований при створенні різноманітних приводів, наприклад, прецизійних слідкувальних вентильно-реактивних приводів. Відомі вентильні електродвигуни (ВД), які містять активний (з постійними магнітами), або реактивний (зубцевий, виготовлений з магнітном’якого матеріалу) ротор, статор з багатосекційною обмоткою, яка сполучена з джерелом живлення через електронний комутатор (ЕК), керувальні входи якого сполучені з давачем положення ротора [1]. Частковим недоліком вентильно-реактивних двигунів є той факт, що ефективно гальмувати вихідний вал в них без використання окремого гальма можливо тільки противмиканням статорних секцій, так як пасивний ротор не має власного поля збудження. Відомі ВД, які додатково містять тахогенераторний блок, який формує сигнали зворотного зв’язку за швидкістю обертання ротора та за струмом [2]. Їхнім недоліком є використання зворотного зв’язку за струмом тільки в процесі пуску дви гуна. Відомий електропривод з відсічкою струму, величина якої визначається відносним перевищенням температури ВД за допустиму температуру якоря електричної машини [3]. Його недоліком є, в першу чергу, занадто складна теплова модель електродвигуна, яка повинна використовува тись для обчислення потрібної відсічки струму. Відомий також ВД, в якому керувальні входи електронного комутатора сполучені з давачем положення ротора (ДПР) через пристрій затримки, а давач-обмежувач спожитого струму сполучений виходом з керувальними входами пристрою (13) 81970 (11) ротора. C2 якої UA T (19) положення ротора, кутовий період визначається співвідношенням: T, град = 360 /(N ´ Zp ) , де Zp - кількість зубців (полюсів) 3 81970 затримки [4]. Недоліком такого двигуна є неможливість збільшення ресурсу його роботи шляхом обмеження відсікання струму при забезпеченні потрібної швидкодії ВД. Найбільш досконалим серед пристроїваналогів і близьким за технічною суттю до запропонованого винаходу є вентильний електродвигун, який захищений [патентом Росії RU 2152120]. Пристрій-прототип містить ротор, статор з багатосекційною обмоткою, яка сполучена з джерелом живлення через ЕК, керувальні входи якого сполучені з ДПР через пристрій затримки, давач-обмежувач спожитого струму ВД, який сполучений виходом до керувального входу пристрою затримки, задавач та давач прискорення вихідного вала, які сполучені з відповідними входами порівнювального пристрою, який сполучений виходом з керувальним входом давача-обмежувача спожитого струму ВД. Особливістю прототипу є наявність задавача і давача прискорення вихідного вала ВД, сполучених ви ходами з входами порівнювального пристрою, на виході якого формується сигнал, який визначає величину відсічки струму в давачіобмежувачі спожитого струму ВД. Внаслідок цього забезпечується потрібна швидкодія, а під час прискорення, реверсування та гальмування за рахунок обмеження струму зменшуються теплові і механічні навантаження на елементи привода. На жаль, пристрій-прототип не забезпечує високу точність і якість перехідних процесів при позиціюванні вихідного вала ВД, коли зубцевий пасивний ротор відповідно до зовнішньої команди повинен зайняти проміжне положення між його фіксованими позиціями для двох чи однієї збуджених статорних секцій. Дійсно, через відсутність власного потоку збудження пасивного ротора його ефективне гальмування без використання спеціального гальма може здійснюватись тільки противмиканням секцій, яке реалізується при реверсуванні двигуна шляхом зміни порядку комутації секцій статорної обмотки. При цьому зубцевий ротор намагається зайняти фіксоване стійке положення, яке відповідає кутовому положенню результуючого магнітного потоку статора при двох збуджених секціях статорної обмотки. В такому випадку неминуче перерегулювання (вибіг) ротора відносно заданого зовні точного програмного положення, а також суттєва похибка відпрацювання командного сигналу. Наприклад, для чотирисекційного вентильного реактивного двигуна з дванадцятизубцевим ротором одиничний кут a1 відпрацювання командного сигналу за стандартної комбінації одно- і двосекційного збудження дорівнює: a1,град=360/(4х12х2)=3,75 Суттєве ж збільшення кількості зубців ротора для підвищення точності відпрацювання командного сигналу обмежене конструктивнотехнологічними особливостями ВД, а також відхиленням від оптимального використання об’єму електричної машини. 4 Задачею даного винаходу є підвищення точності та покращення якості перехідних процесів в ВД при позиціюванні його вихідного валу без доробки електронного комутатора, зі збереженням потрібної швидкодії та обмеженням теплових і механічних навантажень в електродвигуні. Поставлена задача вирішується таким чином, що запропонований вентильний електродвигун, який містить ротор, статор, N секцій обмотки котрого сполучені з джерелом живлення через електронний комутатор, керувальні входи якого через пристрій затримки сполучені з ДПР, задавач і давач прискорення вихідного валу, котрі сполучені виходами з відповідними входами порівнювального пристрою, відповідно до винаходу додатково містить: 1) N давачів-обмежувачів секційних струмів ВД, N суматорів та функціональний перетворювач електричних сигналів; 2) нову структур у взаємозв’язку між елементами електродвигуна, відповідно до якої функціональний перетворювач сполучений входом з виходом ДПР, а N ви ходами - з першими входами відповідних N суматорів, сполученими другими входами з виходом відомого порівнювального пристрою, а виходами - з керувальними входами відповідних N давачівобмежувачів струмів секцій, які сполучені виходами з відповідними керувальними входами відомого пристрою затримки; 3) реалізацію функції перетворення для кожного суматора, характеристики якої в найбільш загальному вигляді виражені через конструктивні параметри електродвигуна: однозначна періодична функція F(d) кута повороту ротора з кутовим періодом: T,град=360/(NxZp), де Zp - кількість зубців (полюсів) ротора ВД. Наявність ознак 1,2 забезпечує синхронне регулювання відсічок струмів секцій за розбіжністю між заданим і фактичним значенням прискорення вихідного вала ВД, а також індивідуально коригувати величини відсічок в залежності від миттєвого положення ротора електродвигуна. Наявність ознаки 3 вказує в найбільш загальному вигляді закон регулювання величин відсічок струмів секцій в залежності від конструктивних параметрів ВД: кількості секцій статорної обмотки N та кількості зубців (полюсів) ротора Zp. Сукупність наведених ознак дозволяє квазіоптимальним чином регулювати на тактах комутації величини відсічок секційних струмів, а також співвідношення між ними відповідно до кутового положення ротора з урахуванням конфігурації магнітного поля в повітряному проміжку конкретної електричної машини. Таке порівняно просте технічне рішення дозволяє суттєво підвищити точність і якість перехідних процесів при позиціюванні пасивного зубцевого ротора ВД, при цьому не потрібна доробка ЕК і зберігаються всі позитивні властивості прототипу: забезпечення потрібної швидкодії та обмеження механічних і теплових 5 81970 навантажень на елементи електродвигуна, за рахунок чого збільшується ресурс його роботи. Для розкриття суті запропонованого винаходу і пояснення принципу його роботи додається креслення на одному аркуші, де на Фіг.1 зображена схема електрична структурна заявленого вентильного електродвигуна. ВД містить ротор 1, статор 2, N секцій обмотки якого сполучені з джерелом живлення 3 через електронний комутатор 4, керувальні входи якого через пристрій затримки 5 сполучені з виходом ДПР 6, задавач 7 і давач 8 прискорення вихідного вала, які сполучені виходами з відповідними входами порівнювального пристрою 9, N давачівобмежувачів 10-13 струмів секцій, N суматорів 1417 і функціональний перетворювач 18 електричних сигналів з виходу ДПР 6. При цьому перетворювач 18 сполучений N виходами з першими входами відповідних суматорів 14-17, які сполучені другими входами з виходом порівнювального пристрою, а виходами - з керувальними входами відповідних давачів-обмежувачів 10-13 струмів секцій, які виходами сполучені з керувальними входами пристрою затримки 5. В перетворювачі 18 для кожного із суматорів 14-17 реалізується однозначна періодична функція кута повороту ротора з наведеним вище кутовим періодом, обчисленим через конструктивні параметри електродвигуна. ВД працює наступним чином. Якщо сигнали на виходах перетворювача 18 відсутні, робота електродвигуна аналогічна роботі прототипу, коли величина відсічок струмів секцій визначається різницею між заданим та фактичним значеннями прискоренням вихідного вала. При появі на виходах перетворювача коригувальних періодичних сигналів, вони передаються на другі входи суматорів 14-17, на виходах яких формуються для відповідних давачів-обмежувачів 10-13 індивідуальні величини відсічок струмів секцій в залежності як від розбіжності за прискоренням вихідного вала, так і від миттєвого положення ротора. Таке порівняно просте технічне рішення дозволяє без доробки ЕК регулювати на тактах комутації величини відсічок струмів секцій і співвідношення між ними з урахуванням конфігурації магнітного поля електричної машини, при цьому схема електронного комутатора 4 не ускладнюється, а його транзистори працюють чисто в ключовому режимі при мінімальних електричних втрата х на комутацію. Відповідно до зміни співвідношення між величинами відсічок змінюються (відповідно до конфігурації магнітного поля електричної машини) позиції фіксованих стійких положень зубцевого ротора і таким чином підвищується точність і якість перехідних процесів при точному позиціюванні вихідного вала ВД за зовнішним командним сигналом. Характер зміни вихідних сигналів перетворювача 18 визначається в кожному конкретному випадку окремо з урахуванням електромагнітних параметрів електричної машини, в загальному ж випадку функція перетворення 6 повинна бути однозначною і періодичною з обчисленим через параметри ВД кутовим періодом. Наведене технічне рішення отримане чисто еврістичним шляхом при експериментальних дослідженнях динаміки руху вентильного реактивного двигуна і, на нашу думку, не очевидне для спеціалістів. Воно може також використовува тись при точному позиціюванні вентильних електродвигунів з активним (збудженим) ротором шляхом противмикання секцій статорної обмотки. Позитивні властивості і можливість промислового використання винаходу підтвердженні при випробовуваннях макетного взірця чотирисекційного вентильного реактивного електродвигуна з оптичним ДПР, в якому функціональний перетворювач виконано на базі сучасного швидкодіючого мікроконтроллера. Відносна похибка відпрацювання командного сигналу не перевищила 0,5-0,75%. 1. Овчинников I.Є. «Теорія вентильних електричних двигунів», Ленінград, «Наука», 1985р., с.23-24. 2. Овчинников І.Є., Лебедев I.І. «Безконтактні двигуни постійного струму», Ленінград, «Наука», 1979р, с.127, 130, 163. 3. Каган В.Г. «Електропривод з відсічкою струму», а. с. СРСР №286024, публікація в бюлетені «Відкриття, винаходи...», 1970р, №34, с.49. 4. А. с. СРСР №1277309, МПК6 Н02К29/02 «Вентильний електродвигун». 5. Патент Росії RU 2152120 С, МПК6 Н02К29/06, виданий 27 липня 1998 року: «Вентильний електродвигун» - прототип. 7 81970 8
ДивитисяДодаткова інформація
Назва патенту англійськоюValve electric motor
Автори англійськоюKocherha Hryhorii Fedorovych, Maliovanyi Oleh Yevhenovych, Radymov Ihor Mykolaiovych, Rymsha Vitalii Viktorovych, Pischev Oleksandr Oleksiiovych, Tkachuk Vasyl Ivanovych, Usachev Viktor Ivanovich, Khil' Petro Petrovych
Назва патенту російськоюВентильный электродвигатель
Автори російськоюКочерга Григорий Федорович, Малеванный Олег Евгеньевич, Радимов Игор Николаевич, Римша Виталий Викторович, Пищев Александр Алексеевич, Ткачук Василий Иванович, Усачов Виктор Иванович, Хиль Петр Петрович
МПК / Мітки
МПК: H02K 29/06
Мітки: електродвигун, вентильний
Код посилання
<a href="https://ua.patents.su/4-81970-ventilnijj-elektrodvigun.html" target="_blank" rel="follow" title="База патентів України">Вентильний електродвигун</a>
Реверсивний вентильний електродвигун

Номер патенту: 14532
Опубліковано: 15.05.2006
Автори: Лютий Анатолій Васильович, Кльова Олексій Васильович
МПК: G08C 19/16, G08C 17/00, H02K 29/06
Мітки: електродвигун, реверсивний, вентильний
Формула / Реферат:
Вентильний двигун, що містить здвоєну магнітну систему з постійними магнітами, що утворюють робочий зазор з різнойменною намагніченістю, магнітну систему з аксіально намагніченими постійними магнітами, при цьому активні поверхні постійних магнітів магнітних систем повернені одна до одної, і електронний комутатор, керуючі ланцюги якого зв'язані з виходом датчика положення магнітних систем, а вихід підключений до обмоток керування, який...
Асинхронно-вентильний каскад
Номер патенту: 34568
Опубліковано: 15.03.2001
Автори: Шевченко Іван Степанович, Потапов Володимир Дмитрович, Самчелєєв Юрій Павлович
МПК: H02K 17/00
Мітки: асинхронно-вентильний, каскад
Формула / Реферат:
Асинхронно-вентильний каскад, до складу якого входить асинхронний двигун, в коло ротора якого ввімкнено трифазний мостовий некерований перетворювач, вихід якого через дросель з'єднаний з виходом трифазного керованого перетворювача при співпадаючій провідності вентилів обох перетворювачів, причому вхід керованого перетворювача з'єднаний з мережею, що живить статор асинхронного двигуна, який відрізняється тим, що послідовно з кожною обмоткою...
Асинхронний вентильний каскад

Номер патенту: 66190
Опубліковано: 15.06.2006
Автори: Скурятін Юрій Васильович, Шевченко Іван Степанович, Морозов Дмитро Іванович, Карпук Ігор Анатолійович, Самчелєєв Юрій Павлович
МПК: H02P 27/04
Мітки: каскад, вентильний, асинхронний
Формула / Реферат:
Спосіб одержання виливків у вакуумованих формах з моделлю, що газифікується, включає встановлення в контейнер з сипким вогнетривким матеріалом пінополістиролової моделі, її вакуумування, подальше гравітаційне заливання з верхнім підведенням металу, охолодження та видалення виливків після їх твердіння, причому гравітаційне заливання форми проводять через багатоярусну ливникову систему при швидкості піднімання металу у формі 5,0-10,0 см/сек і...
Асинхронно-вентильний каскад
Номер патенту: 35713
Опубліковано: 16.04.2001
Автори: Потапов Володимир Дмитрович, Мозговий Сергій Єфімович, Шевченко Іван Степанович, Самчелєєв Юрій Павлович
МПК: H02K 17/00
Мітки: асинхронно-вентильний, каскад
Формула / Реферат:
Асинхронно-вентильний каскад, який містить асинхронний двигун, в коло ротора якого ввімкнений трифазний мостовий керований перетворювач, вихід якого з'єднаний з виходом другого трифазного мостового керованого перетворювача при співпадаючій провідності їх вентилів, при цьому вхід другого перетворювача з'єднаний через реактори з мережею, що живить статор асинхронного двигуна, який відрізняється тим, що послідовно з перетворювачами ввімкнено...
Вентильний електропривід для бортової системи автотранспорту

Номер патенту: 75007
Опубліковано: 15.02.2006
Автори: Акинін Костянтин Павлович, Кіреєв Володимир Георгійович, Бабиченко Владислав Михайлович, Антонов Олександр Євгенович
МПК: H02P 6/00
Мітки: бортової, вентильний, електропривід, системі, автотранспорту
Формула / Реферат:
Вентильний електропривід для бортової системи автотранспорту, який містить електродвигун з постійними магнітами на роторі та трихфазною обмоткою, що з'єднана зіркою, три виводи якої з’єднані з виходами інвертора, перший, другий і третій компаратори напруги та логічний блок, який відрізняється тим, що в електропривід введено формувач пускових імпульсів, четвертий компаратор напруги, блок підсилювачів з першим обмежувачем напруги, блок захисту,...
Попередній патент: Лікарський бронхолітичний засіб комбінованої дії
Наступний патент: Спосіб та пристрій для одержання дихлорпропанолів з гліцерину
Випадковий патент: Очні краплі "платекс"