Спосіб збирання вентилятора з електромотором
Формула / Реферат
1. Спосіб кріплення ротора (20) вентилятора на привідному валу (3) електромотора (1), який має привідний вал (3), що простягається вздовж подовжньої осі обертання (Х-Х), при цьому ротор (20) має з’єднувальні засоби (38), виконані з можливістю встановлення на частині привідного вала (3), і ротор простягається вздовж осі обертання (Х-Х), спосіб передбачає підтримку мотора (1) і ротора (20) співвісно привідному валу (3), штовхання привідного вала (3) вдовж осі обертання (Х-Х), поки він не буде зупинений осьовим обмежувачем (37), розташованим на осі обертання (Х-Х), осьову фіксацію привідного вала (3), штовхання ротора (20) у напрямку осі обертання (Х-Х) на заздалегідь передбачену відстань закріплення (L) привідного вала (3) так, щоб закріпити ротор (20) на привідному валу (3) посадкою з натягом, причому заздалегідь передбачена відстань закріплення (L) залежить від визначеної осьової координати (Х0) і довжини (LA) привідного вала (3).
2. Спосіб за п. 1, в якому привідний вал (3) простягається у два боки барабана мотора вздовж подовжньої осі обертання (X-X).
3. Спосіб за п. 1 або 2, в якому з'єднувальні засоби (38) виконані у вигляді втулки ротора (20).
Текст
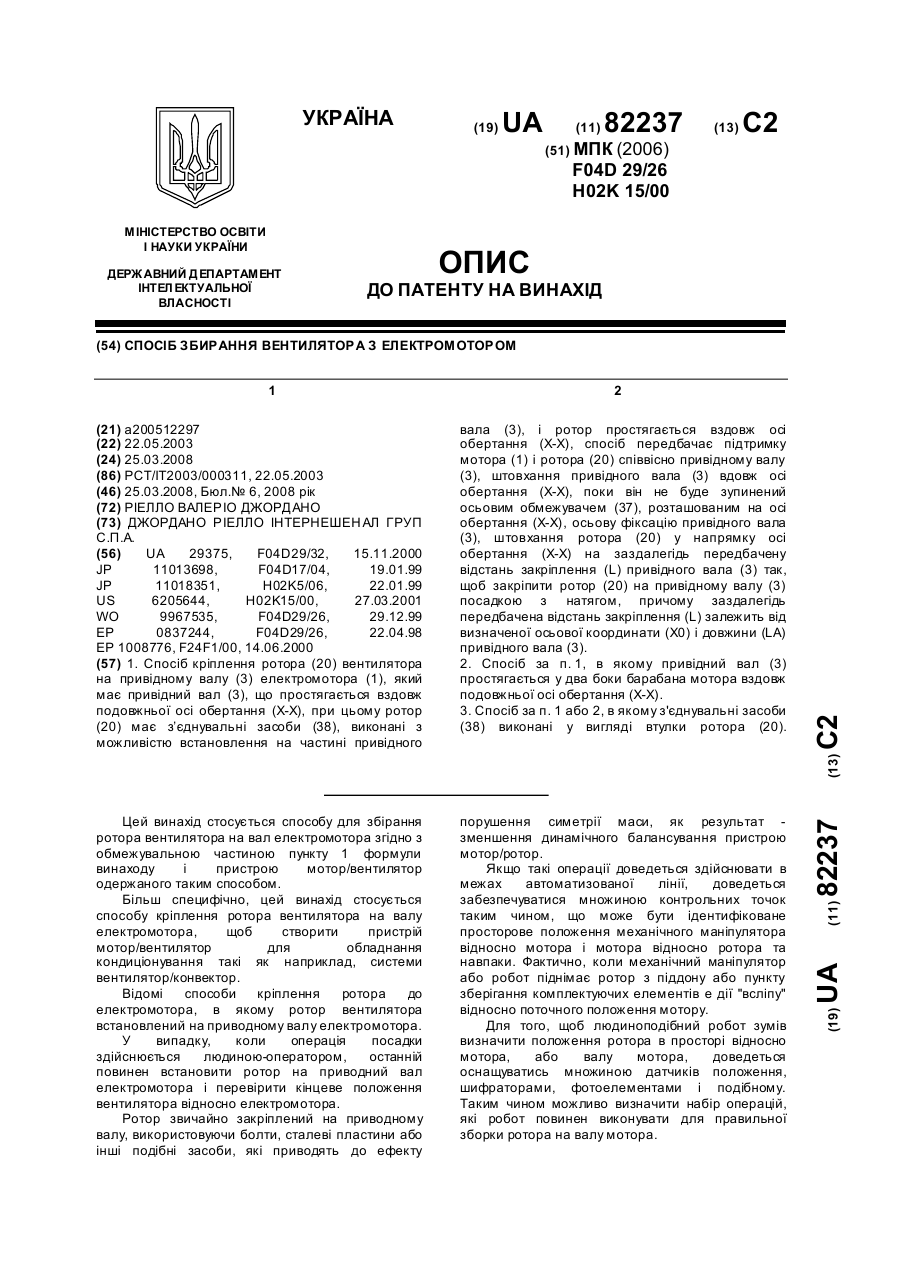
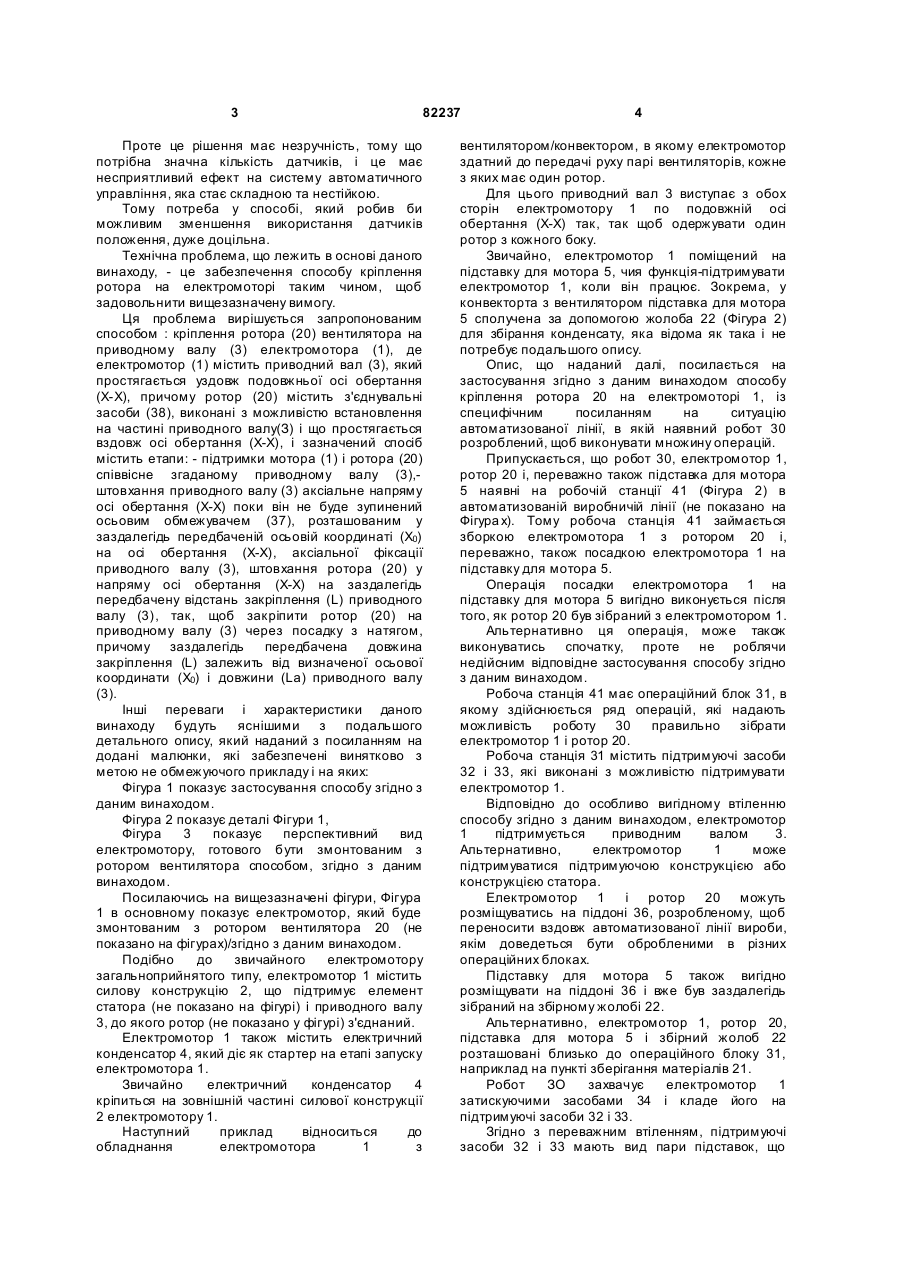
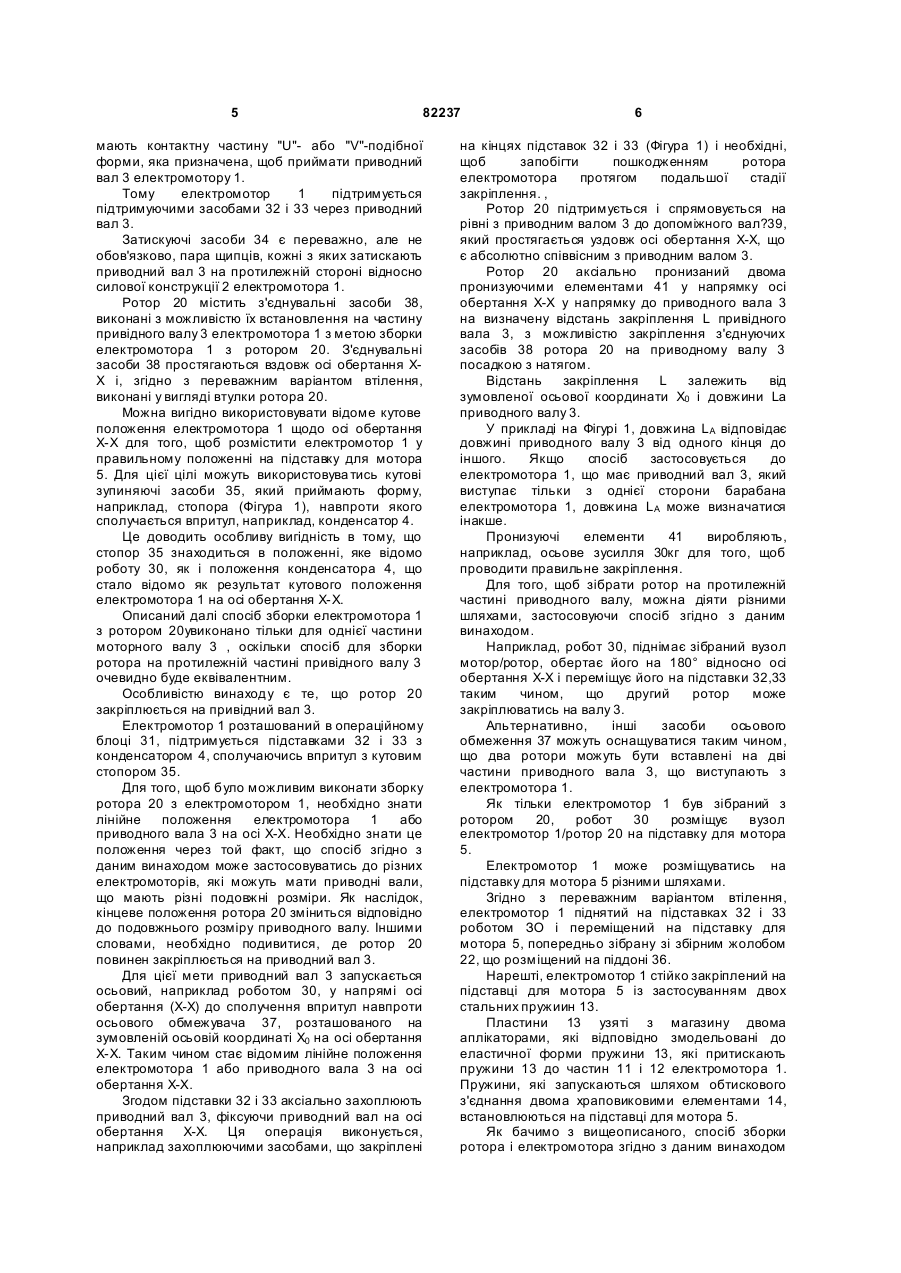
1. Спосіб кріплення ротора (20) вентилятора на привідному валу (3) електромотора (1), який має привідний вал (3), що простягається вздовж подовжньої осі обертання (Х-Х), при цьому ротор (20) має з’єднувальні засоби (38), виконані з можливістю встановлення на частині привідного C2 1 3 82237 Проте це рішення має незручність, тому що потрібна значна кількість датчиків, і це має несприятливий ефект на систему автоматичного управління, яка стає складною та нестійкою. Тому потреба у способі, який робив би можливим зменшення використання датчиків положення, дуже доцільна. Технічна проблема, що лежить в основі даного винаходу, - це забезпечення способу кріплення ротора на електромоторі таким чином, щоб задовольнити вищезазначену вимогу. Ця проблема вирішується запропонованим способом : кріплення ротора (20) вентилятора на приводному валу (3) електромотора (1), де електромотор (1) містить приводний вал (3), який простягається уздовж подовжньої осі обертання (Х-Х), причому ротор (20) містить з'єднувальні засоби (38), виконані з можливістю встановлення на частині приводного валу(З) і що простягається вздовж осі обертання (Х-Х), і зазначений спосіб містить етапи: - підтримки мотора (1) і ротора (20) співвісне згаданому приводному валу (3),штовхання приводного валу (3) аксіальне напряму осі обертання (Х-Х) поки він не буде зупинений осьовим обмежувачем (37), розташованим у заздалегідь передбаченій осьовій координаті (Х0) на осі обертання (Х-Х), аксіальної фіксації приводного валу (3), штовхання ротора (20) у напряму осі обертання (Х-Х) на заздалегідь передбачену відстань закріплення (L) приводного валу (3), так, щоб закріпити ротор (20) на приводному валу (3) через посадку з натягом, причому заздалегідь передбачена довжина закріплення (L) залежить від визначеної осьової координати (Х0) і довжини (La) приводного валу (3). Інші переваги і характеристики даного винаходу будуть яснішими з подальшого детального опису, який наданий з посиланням на додані малюнки, які забезпечені винятково з метою не обмежуючого прикладу і на яких: Фігура 1 показує застосування способу згідно з даним винаходом. Фігура 2 показує деталі Фігури 1, Фігура 3 показує перспективний вид електромотору, готового бути змонтованим з ротором вентилятора способом, згідно з даним винаходом. Посилаючись на вищезазначені фігури, Фігура 1 в основному показує електромотор, який буде змонтованим з ротором вентилятора 20 (не показано на фігурах)/згідно з даним винаходом. Подібно до звичайного електромотору загальноприйнятого типу, електромотор 1 містить силову конструкцію 2, що підтримує елемент статора (не показано на фігурі) і приводного валу 3, до якого ротор (не показано у фігурі) з'єднаний. Електромотор 1 також містить електричний конденсатор 4, який діє як стартер на етапі запуску електромотора 1. Звичайно електричний конденсатор 4 кріпиться на зовнішній частині силової конструкції 2 електромотору 1. Наступний приклад відноситься до обладнання електромотора 1 з 4 вентилятором/конвектором, в якому електромотор здатний до передачі руху парі вентиляторів, кожне з яких має один ротор. Для цього приводний вал 3 виступає з обох сторін електромотору 1 по подовжній осі обертання (Х-Х) так, так щоб одержувати один ротор з кожного боку. Звичайно, електромотор 1 поміщений на підставку для мотора 5, чия функція-підтримувати електромотор 1, коли він працює. Зокрема, у конвекторта з вентилятором підставка для мотора 5 сполучена за допомогою жолоба 22 (Фігура 2) для збірання конденсату, яка відома як така і не потребує подальшого опису. Опис, що наданий далі, посилається на застосування згідно з даним винаходом способу кріплення ротора 20 на електромоторі 1, із специфічним посиланням на ситуацію автоматизованої лінії, в якій наявний робот 30 розроблений, щоб виконувати множину операцій. Припускається, що робот 30, електромотор 1, ротор 20 і, переважно також підставка для мотора 5 наявні на робочій станції 41 (Фігура 2) в автоматизованій виробничій лінії (не показано на Фігура х). Тому робоча станція 41 займається зборкою електромотора 1 з ротором 20 і, переважно, також посадкою електромотора 1 на підставку для мотора 5. Операція посадки електромотора 1 на підставку для мотора 5 вигідно виконується після того, як ротор 20 був зібраний з електромотором 1. Альтернативно ця операція, може також виконуватись спочатку, проте не роблячи недійсним відповідне застосування способу згідно з даним винаходом. Робоча станція 41 має операційний блок 31, в якому здійснюється ряд операцій, які надають можливість роботу 30 правильно зібратиелектромотор 1 і ротор 20. Робоча станція 31 містить підтримуючі засоби 32 і 33, які виконані з можливістю підтримувати електромотор 1. Відповідно до особливо вигідному втіленню способу згідно з даним винаходом, електромотор 1 підтримується приводним валом 3. Альтернативно, електромотор 1 може підтримуватися підтримуючою конструкцією або конструкцією статора. Електромотор 1 і ротор 20 можуть розміщуватись на піддоні 36, розробленому, щоб переносити вздовж автоматизованої лінії вироби, якім доведеться бути обробленими в різних операційних блоках. Підставку для мотора 5 також вигідно розміщувати на піддоні 36 і вже був заздалегідь зібраний на збірному жолобі 22. Альтернативно, електромотор 1, ротор 20, підставка для мотора 5 і збірний жолоб 22 розташовані близько до операційного блоку 31, наприклад на пункті зберігання матеріалів 21. Робот ЗО захвачує електромотор 1 затискуючими засобами 34 і кладе його на підтримуючі засоби 32 і 33. Згідно з переважним втіленням, підтримуючі засоби 32 і 33 мають вид пари підставок, що 5 82237 мають контактну частину "U"- або "V''-подібної форми, яка призначена, щоб приймати приводний вал 3 електромотору 1. Тому електромотор 1 підтримується підтримуючими засобами 32 і 33 через приводний вал 3. Затискуючі засоби 34 є переважно, але не обов'язково, пара щипців, кожні з яких затискають приводний вал 3 на протилежній стороні відносно силової конструкції 2 електромотора 1. Ротор 20 містить з'єднувальні засоби 38, виконані з можливістю їх встановлення на частину привідного валу 3 електромотора 1 з метою зборки електромотора 1 з ротором 20. З'єднувальні засоби 38 простягаються вздовж осі обертання ХХ і, згідно з переважним варіантом втілення, виконані у вигляді втулки ротора 20. Можна вигідно використовувати відоме кутове положення електромотора 1 щодо осі обертання Х-Х для того, щоб розмістити електромотор 1 у правильному положенні на підставку для мотора 5. Для цієї цілі можуть використовува тись кутові зупиняючі засоби 35, який приймають форму, наприклад, стопора (Фігура 1), навпроти якого сполучається впритул, наприклад, конденсатор 4. Це доводить особливу вигідність в тому, що стопор 35 знаходиться в положенні, яке відомо роботу 30, як і положення конденсатора 4, що стало відомо як результат кутового положення електромотора 1 на осі обертання Х-Х. Описаний далі спосіб зборки електромотора 1 з ротором 20увиконано тільки для однієї частини моторного валу 3 , оскільки спосіб для зборки ротора на протилежній частині привідного валу 3 очевидно буде еквівалентним. Особливістю винаходу є те, що ротор 20 закріплюється на привідний вал 3. Електромотор 1 розташований в операційному блоці 31, підтримується підставками 32 і 33 з конденсатором 4, сполучаючись впритул з кутовим стопором 35. Для того, щоб було можливим виконати зборку ротора 20 з електромотором 1, необхідно знати лінійне положення електромотора 1 або приводного вала 3 на осі Х-Х. Необхідно знати це положення через той факт, що спосіб згідно з даним винаходом може застосовуватись до різних електромоторів, які можуть мати приводні вали, що мають різні подовжні розміри. Як наслідок, кінцеве положення ротора 20 зміниться відповідно до подовжнього розміру приводного валу. Іншими словами, необхідно подивитися, де ротор 20 повинен закріплюється на приводний вал 3. Для цієї мети приводний вал 3 запускається осьовий, наприклад роботом 30, у напрямі осі обертання (Х-Х) до сполучення впритул навпроти осьового обмежувача 37, розташованого на зумовленій осьовій координаті Х0 на осі обертання Х-Х. Таким чином стає відомим лінійне положення електромотора 1 або приводного вала 3 на осі обертання Х-Х. Згодом підставки 32 і 33 аксіально захоплюють приводний вал 3, фіксуючи приводний вал на осі обертання Х-Х. Ця операція виконується, наприклад захоплюючими засобами, що закріплені 6 на кінцях підставок 32 і 33 (Фігура 1) і необхідні, щоб запобігти пошкодженням ротора електромотора протягом подальшої стадії закріплення. , Ротор 20 підтримується і спрямовується на рівні з приводним валом 3 до допоміжного вал?39, який простягається уздовж осі обертання Х-Х, що є абсолютно співвісним з приводним валом 3. Ротор 20 аксіально пронизаний двома пронизуючими елементами 41 у напрямку осі обертання Х-Х у напрямку до приводного вала 3 на визначену відстань закріплення L привідного вала 3, з можливістю закріплення з'єднуючих засобів 38 ротора 20 на приводному валу 3 посадкою з натягом. Відстань закріплення L залежить від зумовленої осьової координати Х0 і довжини La приводного валу 3. У прикладі на Фігурі 1, довжина LA відповідаєдовжині приводного валу 3 від одного кінця до іншого. Якщо спосіб застосовується до електромотора 1, що має приводний вал 3, який виступає тільки з однієї сторони барабана електромотора 1, довжина LA може визначатися інакше. Пронизуючі елементи 41 виробляють, наприклад, осьове зусилля 30кг для того, щоб проводити правильне закріплення. Для того, щоб зібрати ротор на протилежній частині приводного валу, можна діяти різними шляхами, застосовуючи спосіб згідно з даним винаходом. Наприклад, робот 30, піднімає зібраний вузол мотор/ротор, обертає його на 180° відносно осі обертання Х-Х і переміщує його на підставки 32,33 таким чином, що другий ротор може закріплюватись на валу 3. Альтернативно, інші засоби осьового обмеження 37 можуть оснащуватися таким чином, що два ротори можуть бути вставлені на дві частини приводного вала 3, що виступають з електромотора 1. Як тільки електромотор 1 був зібраний з ротором 20, робот 30 розміщує вузол електромотор 1/ротор 20 на підставку для мотора 5. Електромотор 1 може розміщуватись на підставку для мотора 5 різними шляхами. Згідно з переважним варіантом втілення, електромотор 1 піднятий на підставках 32 і 33 роботом ЗО і переміщений на підставку для мотора 5, попередньо зібрану зі збірним жолобом 22, що розміщений на піддоні 36. Нарешті, електромотор 1 стійко закріплений на підставці для мотора 5 із застосуванням двох стальних пружиин 13. Пластини 13 узяті з магазину двома аплікаторами, які відповідно змодельовані до еластичної форми пружини 13, які притискають пружини 13 до частин 11 і 12 електромотора 1. Пружини, які запускаються шляхом обтискового з'єднання двома храповиковими елементами 14, встановлюються на підставці для мотора 5. Як бачимо з вищеописаного, спосіб зборки ротора і електромотора згідно з даним винаходом 7 82237 дозволяє задовольнити вимоги і подолати незручності, згадані у ввідній частині до цього опису з посиланням на відомий рівень техніки. Переваги, що випливають з використання способу згідно з даним винаходом полягають переважно в тому, що це допомагає автоматизації зборки ротора з електромотором. На додаток до цього відсутність додаткових компонентів, які, залучаючись, зробили б масу несиметричною, дозволяє досягти кращого динамічного балансування вузла мотор/ротор. 8
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for assemblage of ventilator with electric motor
Автори англійськоюRiello Valerio Giordano
Назва патенту російськоюСпособ сборки вентилятора с электромогором
Автори російськоюРиелло Валерио Джордано
МПК / Мітки
МПК: H02K 15/00, F04D 29/26
Мітки: збирання, спосіб, електромотором, вентилятора
Код посилання
<a href="https://ua.patents.su/4-82237-sposib-zbirannya-ventilyatora-z-elektromotorom.html" target="_blank" rel="follow" title="База патентів України">Спосіб збирання вентилятора з електромотором</a>
Ротор вентилятора турбореактивного двигуна
Номер патенту: 72255
Опубліковано: 15.02.2005
Автори: Дуге Шарль Жан-П'єр, Лежар Клод Робер Луі, Жюде Моріс Гі, Нітр Тьєррі
МПК: F04D 29/26
Мітки: турбореактивного, вентилятора, двигуна, ротор
Формула / Реферат:
1. Ротор вентилятора турбореактивного двигуна, що містить множину знімних лопаток (18) вентилятора, закріплених на ободі (12) диска (10), причому кожна з лопаток (18) вентилятора містить кореневу частину (16) лопатки, яка встановлюється в канавку (14), що має по суті осьовий напрям і відповідну форму та виконана в ободі (12) диска (10), і кожна з цих лопаток (18) вентилятора утримується в канавці (14) за допомогою шпонки (20), розміщеної під...
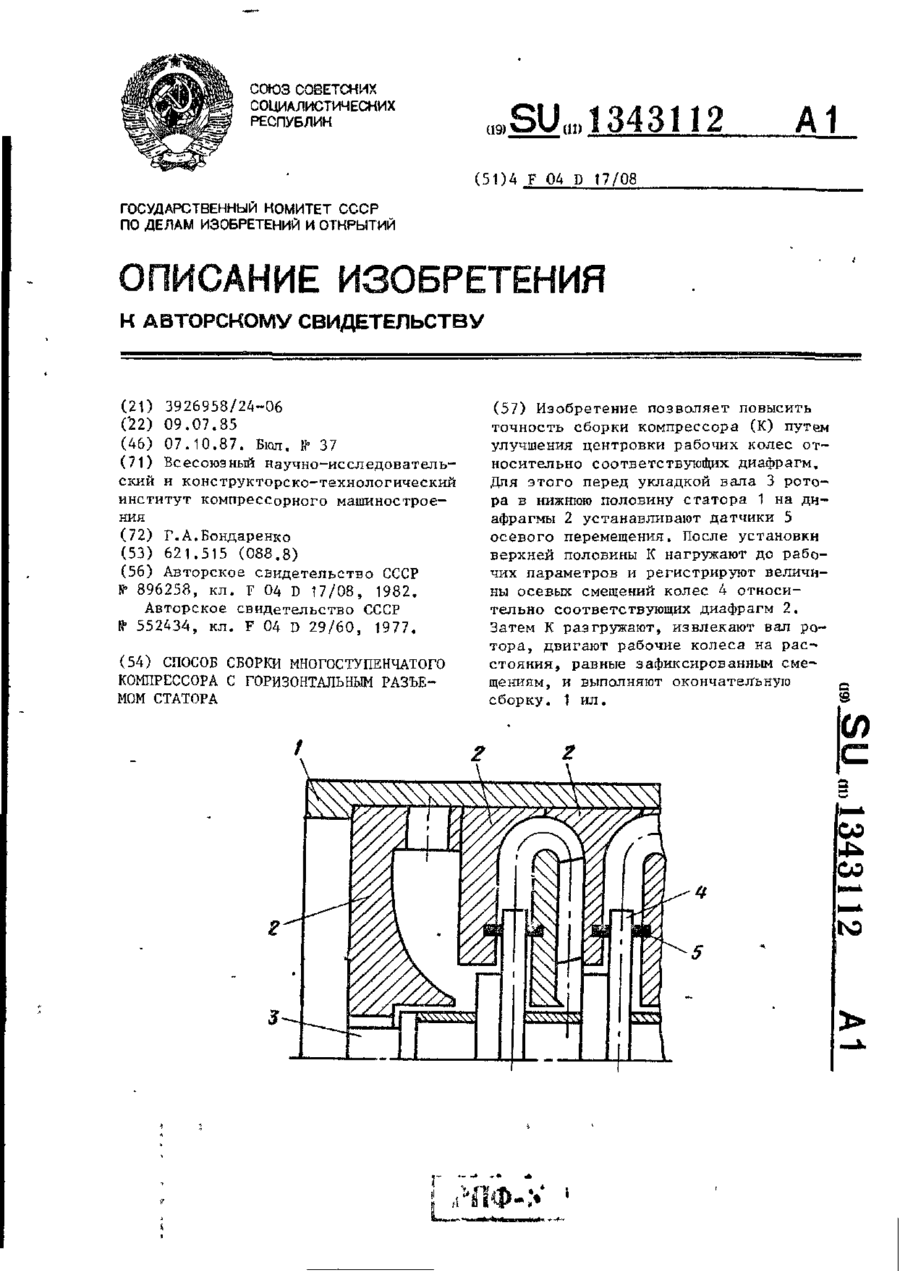
Спосіб збирання багатоступінчатого компресора з горизонтальним роз’єднанням статора
Номер патенту: 13530
Опубліковано: 25.04.1997
Автор: Бондаренко Герман Андрійович
МПК: F04D 17/00
Мітки: горизонтальним, багатоступінчатого, компресора, роз'єднанням, статора, спосіб, збирання
Формула / Реферат:
Способ сборки многоступенчатого компрессора с горизонтальным разъемом статора путем установки рабочих колес на валу ротора, последующей укладки ротора в снабженную половинами пакета диафрагм нижнюю половину статора со смещением осей диффузоров относительно плоскостей, проходящих через середину лопаток на выходе рабочих колес, и установки верхней половины статора, отличающийся тем; что, с целью повышения точности сборки, перед укладкой...
Пристрій для змінення кутів розташування робочих лопаток вентилятора турбодвигуна та спосіб регулювання вентилятора турбодвигуна
Номер патенту: 26462
Опубліковано: 30.08.1999
Автор: Франсі Жерар
МПК: F04D 27/00
Мітки: пристрій, вентилятора, спосіб, кутів, регулювання, турбодвигуна, лопаток, робочих, змінення, розташування
Формула / Реферат:
1. Устройство для изменения углов установки рабочих лопаток вентилятора турбодвигателя, включающее шарнирно установленные в диске вентилятора рабочие лопатки с возможностью поворота их вокруг продольных осей, отличающееся тем, что оно содержит средство блокировки положения рабочих лопаток, причем средство поворота включает электродвигатель с неподвижным статором катушечного типа, установленным в корпусе турбодвигателя, и вращающимся ротором,...
Пристрій для збирання емболів (варіанти) і спосіб відбору емболів (варіанти)
Номер патенту: 67812
Опубліковано: 15.07.2004
Автор: Ріхтер Якоб
МПК: A61F 2/01
Мітки: відбору, пристрій, варіанти, спосіб, емболів, збирання
Формула / Реферат:
1. Пристрій для збирання емболів, які проходять через просвіт, який включає мотор, який має проксимальний кінець і дистальний кінець, де мотор має поздовжній внутрішній канал і забезпечений фрикційною областю, розташованою всередині поздовжнього каналу, при цьому фрикційна область мотора призначена для забезпечення вибірного переміщення мотора навколо поздовжньої осі направляючого проводу, розташованого в поздовжньому каналі; направляючий...
Ротор вентилятора з пристроєм для підтримування аксіального положення лопаток
Номер патенту: 79088
Опубліковано: 25.05.2007
Автори: Регезза Патрік, Мадек Ален, Лямот П'єр, Еван Філіпп, Бассо Ален, Бонні Жан-Клод
МПК: F01D 5/00
Мітки: пристроєм, ротор, підтримування, лопаток, аксіального, вентилятора, положення
Формула / Реферат:
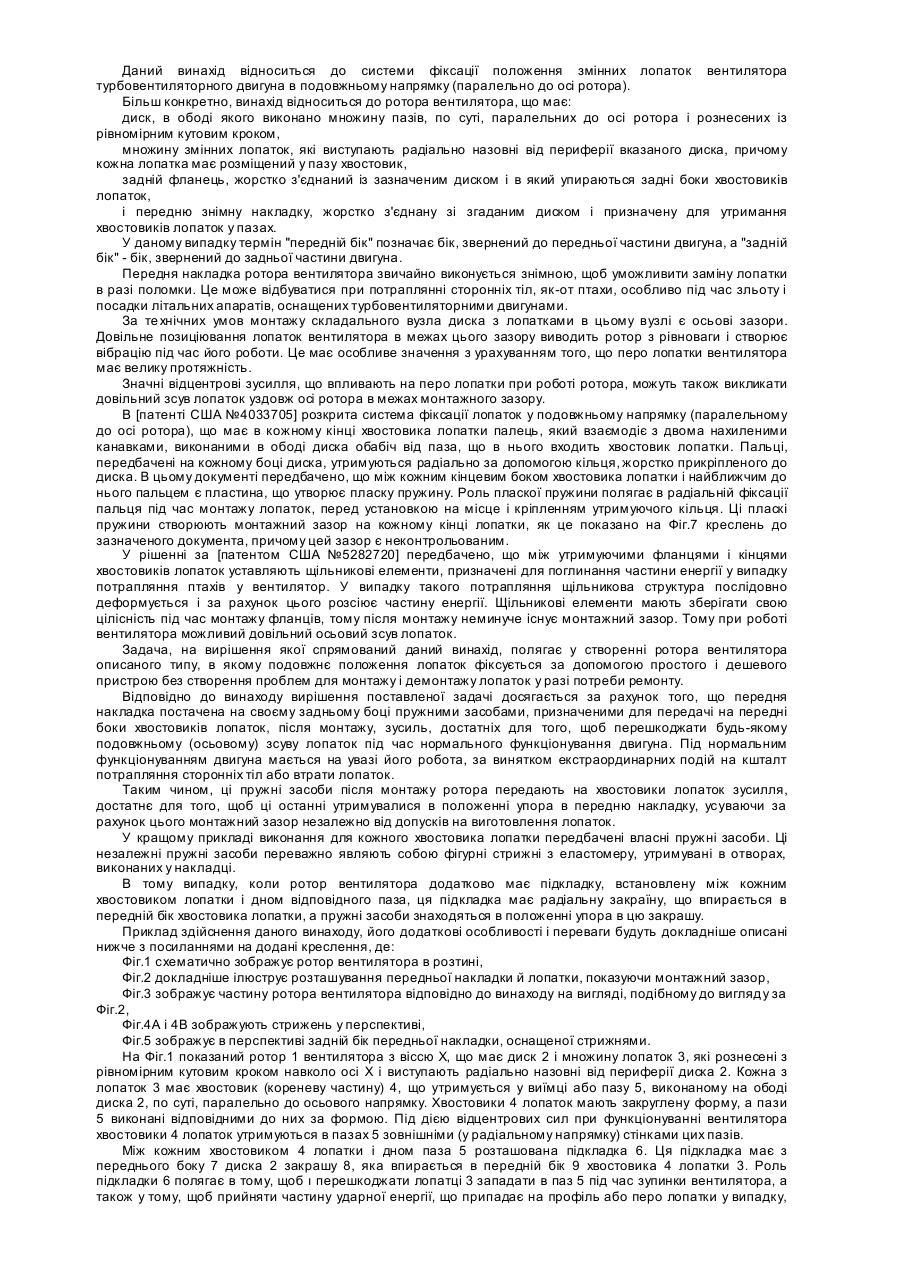
1. Ротор вентилятора, що має диск (2), в ободі якого виконано множину пазів (5), по суті, паралельних до осі ротора і рознесених із рівномірним кутовим кроком, множину змінних лопаток (3), що виступають радіально назовні від периферії диска (2), причому кожна лопатка має розміщений у пазу (5) хвостовик (4) лопатки, задній фланець, який жорстко з'єднаний з диском (2) і в який упираються задні боки хвостовиків лопаток, і знімну передню...
Попередній патент: Заміщені спіробензазепіни
Наступний патент: Вузол вентилятора і конвектора
Випадковий патент: Комбінована теплопередавальна система випарно-конденсаційного типу