Пристрій для змінення кутів розташування робочих лопаток вентилятора турбодвигуна та спосіб регулювання вентилятора турбодвигуна
Формула / Реферат
1. Устройство для изменения углов установки рабочих лопаток вентилятора турбодвигателя, включающее шарнирно установленные в диске вентилятора рабочие лопатки с возможностью поворота их вокруг продольных осей, отличающееся тем, что оно содержит средство блокировки положения рабочих лопаток, причем средство поворота включает электродвигатель с неподвижным статором катушечного типа, установленным в корпусе турбодвигателя, и вращающимся ротором, соединенным с ведущим зубчатым колесом, установленных на подшипниках на валу вентилятора взаимодействующим с зубчатыми секторами, закрепленными на хвостовиках рабочих лопаток и обеспечивающими максимальный их поворот вокруг продольной оси на угол, определяемый двумя неподвижными упорами, соответствующими предельным режимам работы турбодвигателя при прямой и при обратной тяге, а средство блокировки включает соединенный с валом вентилятора электромеханический привод, питаемый от вращающегося трансформатора подвода электроэнергии.
2. Устройство по п.1, отличающееся тем, что узел, включающий ротор электродвигателя, ведущее зубчатое колесо и зубчатые секторы, имеет возможность поворота относительно продольной оси на угол, определяемый двумя неподвижными упорами, соответствующими предельным режимам работы при прямой и обратной тяге.
3. Устройство по п.2, отличающееся тем, что содержит, по меньшей мере, один подвижный упор, соответствующий, по меньшей мере, одному промежуточному положению лопатки между двумя крайними положениями.
4. Устройство по п.3, отличающееся тем, что подвижный упор выполнен в виде электромагнита, питаемого через вращающийся трансформатор.
5. Устройство по п.4, отличающееся тем, что выполненный в виде подвижного упора электромагнит включает в соединенном с валом корпусе катушку, внутри которой установлен с возможностью поступательного перемещения металлический стержень.
6. Устройство по п.5, отличающееся тем, что оттяжная пружина расположена вокруг стержня.
7. Устройство по одному из предыдущих пунктов 1 - 6, отличающееся тем, что электромеханический привод соединен с блокирующим устройством, предназначенным для удерживания опоры лопатки в определенном положении, и содержит в соединенном с валом корпусе катушку, внутри которой расположен металлический стержень, установленный с возможностью поступательного перемещения, при этом стержень соединен с блокирующим устройством.
8. Устройство по п.7, отличающееся тем, что содержит средство контроля за положением стержня электромагнита, выполненного в виде подвижного упора и/или средства контроля за положением стержня привода блокирующего устройства, причем средства контроля за положением включают для каждого из стержней детектор положения, связанный с контрольным устройством положения, питаемым электроэнергией через посредство, по меньшей мере, одного вращающегося трансформатора, когда стержень втянут внутрь,
9. Устройство по п.8, отличающееся тем, что детектор положения выполнен в виде контакта окончания разбега.
10. Устройство по п.9, отличающееся тем, что для подачи электропитания к контрольному устройству положения предусмотрено два трансформатора, выполненных с возможностью вращения, при этом первый трансформатор включает первичную неподвижную обмотку, соединенную с устройством подачи электроэнергии, и вторичную обмотку, закрепленную на валу, а второй трансформатор включает первичную обмотку, закрепленную на валу и соединенную через детектор положения с коробками вторичной обмотки первого трансформатора, и вторичную обмотку, соединенную с контрольным устройством положения.
11. Устройство по п.9, отличающееся тем, что для подачи электроэнергии к контрольному устройству положения предусмотрен один трансформатор, выполненный с возможностью вращения, состоящий из двух независимых обмоток, при этом первая обмотка включает первичную обмотку, соединенную с устройством подачи электроэнергии, и вторичную обмотку, соединенную с генератором колебаний через детектор положения, а вторая обмотка имеет всего несколько витков и включает первичную обмотку, соединенную с генератором колебаний и вторичную обмотку, соединенную с контрольным устройством положения.
12. Способ регулирования вентилятора турбодвигателя, заключающийся в изменении углов установки рабочих лопаток по режимам работы турбодвигателя и блокировке положения рабочих лопаток на заданном режиме, отличающийся тем, что для перехода с одного положения блокировки на первом упоре к другому положению блокировки на втором упоре выполняют последовательно следующие операции: измеряют скорость вращения вала вентилятора и проверяют состояние средств блокировки, подают питание к электродвигателю, создают между статором и ротором электродвигателя вращающееся магнитное поле со скоростью вращения, отличающийся от скорости вращения вала вентилятора и обеспечивают возникновение магнитного момента, способного заблокировать рабочие лопатки вентилятора на первом упоре или удержать их в определенном положении, подают питание к приводу средства блокировки и освобождают от него рабочие лопатки, изменяют скорость вращающегося магнитного поля до появления обратного магнитного момента, вызывающего поворот рабочих лопаток вентилятора от первого упора до второго, прекращают подачу питания к средству блокировки для установки и фиксации рабочих лопаток на втором упоре, прекращают подачу питания к электродвигателю.
13. Способ по п.12, отличающийся тем, что для перехода из одного положения блокировки на первом неподвижном упоре к положению блокировки на втором неподвижном упоре выполняют последовательно следующие операции: перед подачей питания к электродвигателю проверяют положение подвижного упора, подают питание к электромагниту подвижного упора, подают питание к электромеханическому приводу блокирующего устройства, после поворота лопаток и установки их на второй неподвижный упор прекращают подачу питания к подвижному упору для предупреждения возможного возвращения рабочих лопаток в первоначальное положение в случае отказа средства блокировки.
14. Способ по одному из пп.12 или 13, отличающийся тем, что в случае одновременного отказа средства блокировки и подвижных упоров подают питание к электродвигателю и создают вращающееся магнитное поле для постоянной блокировки положения рабочих лопаток на механическом упоре.
Текст
1. Устройство для изменения углов установки рабочих лопаток вентилятора турбодвигателя, включающее шарнирно установленные в диске вентилятора рабочие лопатки с возможностью поворота их вокруг продольных осей, о т л и ч а ю щ е е с я тем, что оно содержит средство блокировки положения рабочих лопаток, причем средство поворота включает электродвигатель с неподвижным статором катушечного типа, установленным в корпусе турбодвигателя, и вращающимся ротором, соединенным с ведущим зубчатым колесом, установленных на подшипниках на валу вентилятора и взаимодействующим с зубчатыми секторами, закрепленными на хвостовиках рабочих лопаток и обеспечивающими максимальный их поворот вокруг продольной оси на угол, определяемый двумя неподвижными упорами, соответствующими предельным режимам работы турбодвигателя при прямой и при обратной тяге, а средство блокировки включает соединенный с валом вентилятора электромеханический привод, питаемый от вращающегося трансформатора подвода электроэнергии. 2. Устройство по п. ^ о т л и ч а ю щ е е с я тем, что узел, включающий ротор электродвигателя, ведущее зубча тое колесо и зубчатые секторы, имеет возможность поворота относительно продольной оси на угол, определяемый двумя неподвижными упорами, соответствующими предельным режимам работы при прямой и обратной тяге. 3. Устройство по п. 2, о т л и ч а ющ е е с я тем, что содержит, по меньшей мере, один подвижный упор, соответствующий, по меньшей мере, одному промежуточному положению лопатки между двумя крайними положениями. 4. Устройство по п. 3, о т л и ч а ющ е е с я тем, что подвижный упор выполнен в виде электромагнита, питаемого через вращающийся трансформатор. 5. Устройство по п. 4, о т л и ч а ющ е е с я тем, что выполненный в виде подвижного упора электромагнит включает в соединенном с валом корпусе катушку, внутри которой установлен с возможностью поступательного перемещения металлический стержень. 6. Устройство по п. 5, о т л и ч а ющ е е с я тем, что оттяжная пружина расположена вокруг стержня. 7. Устройство по одному из предыдущих пунктов 1-6, о т л и ч а ю щ е е с я тем, что электромеханический привод соединен с блокирующим устройством, предназначенным для удерживания опоры лопатки в определенном положении, и содержит в соединенном с валом корпусе катушку, внутри которой расположен металлический стержень, установленный с возможностью поступательного перемещения, при этом стержень соединен с блокирующим устройством. 8. Устройство по п. 7, о т л и ч а ющ е е с я тем, что содержит средство контроля за положением стержня электромагнита, выполненного в виде подвиж ю ON Os о 26462 ного упора и/или средства контроля за положением стержня привода блокирующего устройства, причем средства контроля за положением включают для каждого из стержней детектор положения, связанный с контрольным устройством положения, питаемым электроэнергией через посредство, по меньшей мере, одного вращающегося трансформатора, когда стержень втянут внутрь. 9. Устройство по п. 8, о т л и ч а ющ е е с я тем, что детектор положения выполнен в виде контакта окончания разбега. 10. Устройство по п. 9, о т л и ч а ющ е е с я тем, что для подачи электропитания к контрольному устройству положения предусмотрено два трансформатора, выполненных с возможностью вращения, при этом первый трансформатор включает первичную неподвижную обмотку, соединенную с устройством подачи электроэнергии, и вторичную обмотку, закрепленную на валу, а второй трансформатор включает первичную обмотку, закрепленную на валу и соединенную через детектор положения с коробками вторичной обмотки первого трансформатора, и вторичную обмотку, соединенную с контрольным устройством положения. 11. Устройство по п. 9, о т л и ч а ющ е е с я тем, что для подачи электроэнергии к контрольному устройству положения предусмотрен один трансформатор, выполненный с возможностью вращения, состоящий из двух независимых обмоток, при этом первая обмотка включает первичную обмотку, соединенную с устройством подачи электроэнергии, и вторичную обмотку, соединенную с генератором колебаний через детектор положения, а вторая обмотка имеет всего несколько витков и включает первичную обмотку, соединенную с генератором колебаний и вторичную обмотку, соединенную с контрольным устройством положения. 12. Способ регулирования вентилятора турбодвигателя, заключающийся в изменении углов установки рабочих лопаток по режимам работы турбодвигателя и блокировке положения рабочих лопаток на заданном режиме, о т л и ч а ю щ и й с я тем, что для перехода с одного положения блокировки на первом упоре к другому положению блокировки на втором упоре выполняют последовательно следующие операции: измеряют скорость вращения вала вентилятора и проверяют состояние средств блокировки, подают питание к электродвигателю, создают между статором и ротором электродвигателя вращающееся магнитное поле со скоростью вращения, отличающийся от скорости вращения вала вентилятора и обеспечивают возникновение магнитного момента, способного заблокировать рабочие лопатки вентилятора на первом упоре или удержать их в определенном положении, подают питание к приводу средства блокировки и освобождают от него рабочие лопатки, изменяют скорость вращающегося магнитного поля до появления обратного магнитного момента, вызывающего поворот рабочих лопаток вентилятора от первого упора до второго, прекращают подачу питания к средству блокибровки для установки и фиксации рабочих лопаток на втором упоре, прекращают подачу питания к электродвигателю. 13. Способ по п. ^ . о т л и ч а ю щ и й с я тем, что для перехода из одного положения блокировки на первом неподвижном упоре к положению блокировки на втором неподвижном упоре выполняют последовательно следующие операции: перед подачей питания к электродвигателю проверяют положение подвижного упора, подают питание к электромагниту подвижного упора, подают питание к электромеханическому приводу блокирующего устройства, после поворо* та лопаток и установки их на второй неподвижный упор прекращают подачу питания к подвижному упору для предупреждения возможного возвращения рабочих лопаток в первоначальное положение в случае отказа средства блокировки. 14. Способ по одному из пп. 12 или 13, о т л и ч а ю щ и й с я тем, что в случае одновременного отказа средства блокировки и подвижных упоров подают питание к электродвигателю и создают вращающееся магнитное поле для постоянной блокировки положения рабочих лопаток на механическом упоре. 26462 Изобретение относится к области производства вентиляторов турбодвигателей, в частности, к способам и устройствам регулирования вентилятора турбодвигателя. Известно устройство для изменения углов установки рабочих лопаток вентилятора турбодвигателя и способ регулирования его [1]. Устройство включает шарнирно установленные в диске вентилятора рабочие лопатки с возможностью поворота их вокруг продольных осей таким образом, что они способны регулировать свой шаг. Особенно необходимо приспосабливать угол установки рабочих лопаток вентилятора турбодвигателя к переменным условиям полета для достижения оптимальных рабочих характеристик двигателя и инверсии давления. В процессе работы может быть достигнута оптимальная энергетическая выходная мощность двигателя за счет изменения угла установки рабочих лопаток с тем, чтобы он соответствовал специфическим условиям функционирования. Способ регулирования вентилятора турбодвигателя заключается в изменении угла установки рабочих лопаток по режимам работы турбодвигателя и блокировке положения рабочих лопаток на заданном режиме и обычно включает гидравлические приводы, вовлекающие зубчатые зацепления для установления рабочих лопаток в желаемое положение. Такие устройства, а следовательно, и способы регулирования, являются сложными, громоздкими и имеют проблемы, связанные с надежностью. Существуют также электрические системы сцепления для регулирования угла установки лопаток вентилятора. Обычно эти системы используют двигатели постоянного тока, которые приводятся в действие и останавливаются с помощью реле, питаемых посредством питающей магистрали постоянного тока самолета, и включают средства передачи электрической мощности, использующие электрические контакты между коллектором и подверженными износу щетками, представляющими проблемы надежности. Задача, которая стоит перед настоящим изобретением, заключается в разработке легкого и малогабаритного устройства для изменения углов установки рабочих лопаток вентилятора турбодвигателя и способа регулирования вентилятора турбодвигателя, которые обеспечили бы простоту и надежность в работе. 5 10 15 20 25 30 35 40 45 50 55 Поставленная задача решается за счет того, что устройство для изменения углов установки рабочих лопаток вентилятора турбодвигателя, включает шарнирно установленные в диске вентилятора рабочие лопатки с возможностью поворота их вокруг продольных осей, в соответствии с изобретением содержит средство поворота и средство блокировки положения рабочих лопаток, причем средство поворота включает электродвигатель с неподвижным статором катушечного типа, установленным в корпусе турбодвигателя, и вращающимся ротором, соединенным с ведущим зубчатым колесом, установленным на подшипниках на валу вентилятора и взаимодействующим с зубчатыми секторами, закрепленными на хвостиках рабочих лопаток и обеспечивающими максимальный их поворот вокруг продольной оси на угол, определяемый двумя неподвижными упорами, соответствующими предельным режимам работы турбодвигателя при прямой и при обратной тяге, а средстзо блокировки включает соединенный с валом вентилятора электромеханический привод, питаемый от вращающегося трансформатора подвода электроэнергии. На решение указанной задачи направлены и дополнительные усовершенствования, заключающиеся в том, что узел, включающий ротор электродвигателя, ведущее зубчатое колесо и зубчатые секторы, имеет возможность поворота относительно продольной оси на угол, определяемый двумя неподвижными упорами, соответствующими предельным режимам работы при прямой и обратной тяге, кроме того, устройство содержит по меньшей мере один подвижный упор, соответствующий по меньшей мере одному промежуточному положению рабочей лопатки между двумя крайними положениями, и что подвижный упор выполнен в виде электромагнита, питаемого через вращающийся трансформатор, причем выполненный в виде подвижного упора электромагнит включает в соединенном с валом корпусе катушку, внутри которой установлен с возможностью поступательного перемещения металлический стержень, а оттяжная пружина расположена вокруг указанного стержня. В соответствии с изобретением, электромеханический привод соединен с блокирующим устройством, предназначенным для удерживания опоры рабочей лопатки, в определенном положении, и содержит в соединенном с валом корпусе катушку, внутри которой расположен металлический стержень, уста 26462 новленный с возможностью поступательного перемещения, при этом стержень соединен с блокирующим устройством, предусмотрено также, что устройство содержит средства контроля за положением стержня электромагнита, выполненного в виде подвижного упора и/или средства контроля за положением стержня привода блокирующего упора, причем средства контроля за положением включают для каждого из стержней детектор положения, связанный с контрольным устройством положения, питаемым электроэнергией через посредство по меньшей мере одного вращающегося трансформатора, когда стержень втянут внутрь, причем детектор положения выполнен в виде контакта окончания разбега, кроме того, для подачи электропитания к контрольному устройству положения предусмотрено два трансформатора, выполненных с возможностью вращения, при этом первый трансформатор включает первичную неподвижную обмотку, соединенную с устройством подачи электроэнергии, и вторичную обмотку, закрепленную на валу, а второй трансформатор включает первичную обмотку, закрепленную на вале и соединенную через детектор положения с коробками вторичной обмотки первого трансформатора, и вторичную обмотку, соединенную с контрольным устройством положения, а для подачи электроэнергии к контрольному устройству положения предусмотрен один трансформатор, выполненный с возможностью вращения, состоящий из двух независимых обмоток, при этом первая обмотка включает первичную обмотку, соединенную с устройством подачи электроэнергии, и вторичную обмотку, соединенную с генератором колебаний через детектор положения, а вторая обмотка имеет всего несколько витков и включает первичную обмотку, соединенную с генератором колебания и вторичную обмотку, соединенную с контрольным устройством положения. 5 10 15 20 25 30 35 40 45 На решение поставленной выше задачи направлен и способ регулирования вентилятора турбодвигателя, заключаю- 50 щийся в изменении углов установки рабочих лопаток по режимам работы турбодвигателя и блокировке положения рабочих лопаток на заданном режиме, и в соответствии с изобретением для перехо- 55 да от одного положения блокировки на первом упоре к другому положению блокировки на втором упоре выполняют последовательно следующие операции: измеряют скорость вращения вала вентиля 8 тора и проверяют состояние средств блокировки, подают питание к электродвигателю, создают между статором и ротором электродвигателя вращающееся магнитное поле со скоростью вращения, отличающейся от скорости вращения вала вентилятора и обеспечивают возникновение магнитного момента, способного заблокировать рабочие лопатки вентилятора на первом упоре или удержать их в определенном положении, подают питание к приводу средства блокировки и освобождают от него рабочие лопатки, изменяют скорость вращающегося магнитного поля до появления обратного магнитного момента, вызывающего поворот рабочих лопаток вентилятора от первого упора до второго, прекращают подачу питания к средству блокировки для установки и фиксации рабочих лопаток на втором упоре, прекращают подачу питания к электродвигателю, кроме того, для перехода из одного положения блокировки на первом неподвижном упоре к положению блокировки иа втором неподвижном упоре выполняют последовательно следующие операции: перед подачей питания к электромеханическому приводу блокирующего устройства, после поворота лопаток и установки их на второй неподвижный упор, прекращают подачу питания к подвижному упору для предупреждения возможного возвращения рабочих лопаток в первоначальное положение в случае отказа средства блокировки, причем в случае одновременного отказа средства блокировки и подвижных упоров подают питание к электродвигателю и создают вращающееся магнитное поле для постоянной блокировки положения рабочих лопаток на механическом упоре. На фиг. 1 изображен частичный осевой разрез передней части турбореактивного двигателя, включающего устройство регулирования изменения углов установки рабочих лопаток вентилятора по изобретению; на фиг. 2, 3, 4 - один вид в перспективе и два вида в разрезе приводного устройства изменения угла установки рабочих лопаток по изобретению; на фиг. 5 - схематичный вид варианта исполнения подвижных упоров по изобретению; на фиг. 6 и 7 - два схематичных вида, представляющих соответственно расположение системы блокирования рабочих лопаток относительно диска с рабочими лопатками и механизм блокирования опоры рабочих лопаток по изобретению; на фиг. 8 - первый вариант исполнения регулирующего электрического уст 26462 ройства и контрольного устройства электромеханического привода по изобретению; на фиг 9 - второй пример исполнения электрического устройства регулирования и контроля электромеханического привода по изобретению; на фиг 10 - пример сравнивающей амплитуды питающего тока электромеханического привода во время блокирования и разблокирования; на фиг. 11, 12, 13 - три примера вращающихся трансформаторов по изобретению; на фиг. 14 - пример диаграммы функционирования регулирующего устройства для изменения углов установки рабочих лопаток во время перехода от прямоструйной фазы к фазе с обратным направлением струи; на фиг. 15 - пример диаграммы функционирования регулирующего устройства для изменения углов установки рабочих лопаток во время перехода от фазы взлета к фазе полета. Фиг. 1 представляет частичный осевой разрез передней части турбореактивного двигателя, включающий регулирующее устройство для изменения углов установки рабочих лопаток вентилятора по изобретению. Турбореактивный двигатель включает вентилятор, состоящий из множества рабочих лопаток 1, закрепленных на диске, вращающемся от основного вала 2 турбодвигателя, при этом вал 2 в свою очередь вращается от генератора (не показан) и через посредство редуктора 3 скорости. Каждая рабочая лопатка вентилятора включает опору 4, которая может вращаться вокруг своей продольной оси ZZ' таким образом, что угол установки рабочей лопатки может изменяться. Регулирующее устройство для изменения углов установки рабочих лопаток вентилятора включает приводные средства для изменения углов установки рабочих лопаток и средства блокирования опоры рабочих лопаток в определенном положении. Приводные средства для изменения углов установки рабочих лопаток схематично представлены на фиг. 2, 3, 4. Они включают электрический двигатель с неподвижным статором 5 катушечного типа, соединенным с корпусом 6 турбодвигателя, и вращающимся ротором 7, соединенным с ведущим зубчатым колесом 8, установленном на подшипниках на валу 2 вентилятора. Ведущее зубчатое колесо 8 сцеплено с зубчатыми секторами 9, зафиксированными на опоре 4 каждой рабочей лопатки 1 вентилятора, что дает возможность рабочим лопаткам вращаться вокруг их продольной оси ZZ' Максимальный угол вращения узла, представ 5 10 15 20 25 30 35 40 45 50 55 10 ленного зубчатым сектором 9, ведущим зубчатым колесом 8 и ротором 7 электродвигателя, ограничен двумя неподвижными упорами 10 и 11 так, как представлено схематично на фиг. 2 Эти два неподвижных упора соответствуют функционированию турбодвигателя на прямой струе или на струе обратного направления Чтобы получить одну или множество промежуточных позиций рабочих лопаток, в дополнение к неподвижным упорам могут быть предусмотрены подвижные упоры 12, например, электромагниты, так, как представлено на фиг. 4. Фиг 5 изображает схематический пример выполнения подвижных упоров по изобретению. Для достижения множества различных угловых позиций дополнительные упоры могут быть расположены на угловом контуре зубчатого сектора 9, связанного с опорой 4 рабочей лопатки 1, между двумя неподвижными упорами 10, 11. Как раз особый интерес представляет размещение трех различных угловых позиций для получения первой позиции для взлета, второй позиции для состояния полета, третьей позиции для изменения направления струи на обратное. Каждый подвижный упор 12 может быть выполнен в виде электромагнита 13. В соединенном с валом 2 турбодвигателя корпусе электромагнит включает катушку, внутри которой под действием магнитного поля может перемещаться металлический стержень 14. Для повышения надежности и безопасности регулирующего устройства для изменения углов установки рабочих лопаток вокруг металлического стержня 14 располагается оттяжная пружина 15 таким образом, чтобы удерживать стержень в позиции выхода, т. е. в позиции окончания разбега, когда электромагнит 13 не питается. Положение подвижного упора регулируется автоматически и пос- * тоянно посредством детектора 16 положения, например, по типу контакта при окончании разбега. Учитывается то, что опоры у рабочих лопаток 1 удерживаются механически зубчатым колесом посредством зубчатых секторов 9, то для получения промежуточного положения рабочей лопатки достаточно расположить подвижный упор на одну только рабочую лопатку, чтобы все рабочие лопатки располагались в этой промежуточной позиции. Однако, чтобы повысить надежность устройства для углов установки рабочих лопаток, для заранее определенной про 11 26462 межуточной позиции выгодно расположить подвижный упор на нескольких различных рабочих лопатках. Конкретно, на фиг. 6, 7 три расположенные через определенные интервалы рабочие лопатки оснащены одним подвижным упором для заранее определенной промежуточной позиции. Аналогично можно получить несколько промежуточных позиций, размещая несколько подвижных упоров в различных угловых позициях относительно зубчатого сектора 9. Расположенные в различных угловых позициях относительно зубчатых секторов подвижные упоры не обязательно помещаются на одну и ту же опору рабочей лопатки. Приводные электромагниты 13 подвижных упоров 12 могут питаться через посредство вращающегося трансформатора, без механического контакта. Применяемый электрический двигатель может быть двигателем с постоянным магнитом или асинхронного типа, чтобы устранить проблемы, связанные с трением и износом между вращающейся и неподвижной частями, катушечный статор неподвижен и питается переменным током с помощью известных не показанных средств, например, от генератора переменного тока или генератора, связанного с выпрямителем и инвертором с целью получения переменного тока регулируемой частоты. В случае с ротором и постоянным магнитом, этот ротор может включать в случае необходимости обмотку замкнутого контура таким образом, чтобы повысить мощность двигателя и уменьшить его размеры, причем эта обмотка не связана с обмоткой статора. Блокирующие устройства рабочих лопаток схематично представлены на фиг. 6 и 7. Они включают электромеханический привод 17, например, электромагнит, связанный с блокирующим устройством 18, предназначенным для удерживания опоры 4 рабочих лопаток 1 в определенной позиции. Опоры 4 рабочих лопаток 1 обработаны таким образом, чтобы они имели несколько поверхностей, соответствующих различным заранее определенным возможным позициям. Электромеханический привод 17 содержит в соединенном с валом 2 двигателя корпусе катушку, внутри которой расположен металлический стержень 19, установленный с возможностью поступательного перемещения. Блокирущее устройство 18 соединено со стержнем 19. Когда стержень перемещается поступательно, он вовлекает в перемещение блокирующее устройство 18. Для удер 12 живания опоры лопаток в определенной позиции блокирущее устройство 18 снабжено пазами 20 в соответствии с опорами рабочих лопаток. В положении блоки5 рования опоры рабочих лопаток блокируются в пазах блокирующего устройства. Для повышения надежности системы блокирования положение блокирующего устройства регулируется автоматически и пос10 тоянно через посредство детектора 21 положения, например, в виде контакта окончания разбега. Ввиду того, что все рабочие лопатки снабжены зубчатым участком и эти зуб15 чатые участки сцеплены одним и тем же зубчатым колесом, все рабочие лопатки соединены механически одна относительно другой. Следовательно, нет необходимости в том, чтобы блокирующее устройст20 во удерживало все опоры рабочих лопаток. Достаточно того, чтобы удерживалась всего одна рабочая лопатка для блокирования всех остальных в одной позиции. Однако, в целях надежности и ста25 бильности желательно, чтобы блокирующее устройство удерживало две диаметрально противоположные рабочие лопатки или расположенные через определенные интервалы три рабочие лопатки, как 30 показано на фиг. 6 и 7. Таким образом, как и приводные электромагниты 13 подвижных упоров 12, привод 17 питается через посредство вращающегося трансформатора, без меха35 нического контакта. Фиг. 8 представляет первый вариант исполнения регулирующего и контрольного устройства электромеханического привода по изобретению. 40 Управление приводом 17 осуществляется от первого вращающегося трансформатора 22, включающего первичную неподвижную обмотку 23, соединенную с корпусом турбодвигателя, во вторичную об45 мотку 24, закрепленную на валу 2 турбодвигателя. На входе вращающегося трансформатора 22 первичная обмотка 23 подк• лючена к устройству подачи электроэнергии 25. На выходе вращающегося транс50 форматора 22 вторичная обмотка 24 передает необходимую электрическую мощность для управления привода 17 после выпрямления с помощью мостиковой диодной схемы 26. Регулирующая элект55 рическая мощность привода должна быть достаточно высокой, чтобы преодолеть его инерцию и дать возможность подвижному стержню 19 перемещаться. На положение подвижного стержня 19 привода 17 указывает детектор 21 поло 13 26462 жения, например, выполненный в виде контакта окончания разбега, представляющего собой электрический прерыватель, данные детектора передаются на контрольное устройство 27 положения через посредство второго вращающегося трансформатора 28. Этот второй вращающийся трансформатор 28 включает первичную обмотку 29, закрепленную на валу 2 турбодвигателя и подключенную к зажимам вторичной обмотки 24 первого вращающегося трансформатора 22, и вторичную обмотку 30, подключенную ко входу контрольного устройства 27 положения. Когда прерыватель детектора 21 положения закрыт, второй вращающийся трансформатор 28 питается через посредство первого вращающегося трансформатора 22 и передает полученную энергию на контрольное устройство 27 положения. Этот первый пример электрического регулирующего и контрольного устройства электромеханического привода особенно хорошо подходит к внешней среде, где температурные напряжения играют важную роль, так как он включает очень мало электронных компонентов. Однако, наличие двух вращающихся трансформаторов представляет неудобства а том плане; что это увеличивает массу и габариты блокирующего устройства рабочих лопаток. Фиг. 9 показывает второй пример электрического регулирующего устройства электромеханического привода по изобретению. Управление приводом 17 осуществляется через посредство вращающегося трансформатора 31, состоящего из двух независимых обмоток, причем каждая обмотка включает первичную и вторичную обмотки. Первичная 32 и вторичная 33 обмотки предназначены для подачи электрической мощности, поступающей от питающего устройства 26 и необходимой для управления приводом 17, и для питания через детектор 21, выполненного в виде контакта окончания разбега, генератора 34 колебаний с повышенной частотой f и низким уровнем по отношению к частоте и уровню питающей электрической мощности. Выходной сигнал генератора колебаний регулируется по напряжению с помощью внутреннего регулятора напряжений (не показано). Первичная 35 и вторичная 36 обмотки включают только несколько витков и предназначены для передачи к контрольному устройству 27 положения поступившего от генератора 34 сиг 14 нала, частота f которого указывает на положение привода 17. Этот второй пример электрического регулирующего и контрольного устройства 5 электромеханического привода представляет преимущественно уменьшенные массу и габариты, так как он включает только один вращающийся трансформатор для одновременной передачи, посредством не10 зависимых обмоток, электрической мощности от неподвижной установки к вращающейся установки и электрического сигнала, указывающего положение привода. Однако, присутствие генератора колеба15 ний ограничивает его применение средой, где температурные колебания соответствуют рабочей гамме генератора. Управление приводом осуществляется следующим образом. 20 Во время периода блокирования стержень 19 привода 17 находится в позиции окончания разбега, при этом прерыватель, представляющий собой детектор положения, открыт и никакой сигнал не пере25 дается к контрольному устройству 27. Под действием команды разблокирования привод 17 питается достаточно высокой электрической мощностью, чтобы позволить перемещение подвижного 30 стержня 19. Внутри обмотки привода 17 возникает магнитный поток и под действием магнитных сил подвижный стержень 19 перемещается в поступательном направлении к положению блокирования. В 35 ходе своего перемещения стержень действует на детектор 21 положения, который закрывается. Тогда электрический сигнал передается на контрольное устройство 27 положения. 40 Фиг. 10 представляет пример, сравнивающий амплитуды питающего тока привода во время периодов блокирования и разблокирования. * Во время периода разблокирования^ 45 контроль за положением стержня 19 при-* вода осуществляется посредством передачи электрического сигнала к контроль• ному устройству 27 положения, когда стержень находится точно в позиции разбло50 кирования. Отсутствие передачи электрического сигнала указывает на неисправность привода. Во время периода блокирования контроль за положением стержня 19 привода 55 .осуществляется путем передачи к приводу 17 электрического сигнала, амплитуда которого ниже амплитуды, необходимой для перемещения подвижного стержня 19. * Отсутствие передачи электрического сигнала к контрольному устройству 27 поло 15 26462 жения указывает на правильное функционирование привода. Управление электромагнитом 13 подвижных упоров 12 осуществляется таким же образом, как и управление приводом .17 блокирования рабочих лопаток. Следовательно, предыдущее описание относительно фиг. 8, 9 и 10 в равной степени относится к управлению электромагнитами 13. На фиг. 1 1 , 12, 13 представлены три примера вращающихся трансформаторов по изобретению. Вращающиеся трансформаторы включают неподвижный магнитный контур, соединенный с неподвижной структурой турбодвигателя' отделенный от вращающегося магнитного контура 38 аксиальными воздушными зазорами 39, 40. Вращающийся магнитный контур крепится к валу 2 турбодвигателя. В изображенной на фиг. 11 конфигурации вращающийся трансформатор включает обмотку, состоящую из неподвижной первичной обмотки 41 и вращающейся вторичной обмотки 42, позволяющих передавать бесконтактно электрическую мощность от неподвижной установки к вращающейся установке. В изображенной на фиг. 12 конфигурации вращающийся трансформатор включает первичную обмотку, позволяющую бесконтактно передавать электрическую мощность от неподвижной установки к вращающейся установке, и вторичную обмотку, включающую несколько витков (например, один или два витка) независимо от первичной обмотки, давая возможность передавать электрический сигнал. В изображенной на фиг. 13 конфигурации представлены три вращающихся трансформатора. Расположены они друг над другом таким образом, чтобы составить три независимые обмотки с изолированными друг от друга магнитными полями. Они позволяют передавать три электрические мощности независимо друг от друга. Возможны другие конфигурации. В частности, необходимо иметь два вращающихся трансформатора для питания, с одной стороны, электромагнита 13 подвижных упоров, соответствующих одному и тому же промежуточному положению рабочих лопаток вентилятора, а с другой стороны - привода 17 системы блокирования рабочих лопаток. Эти два вращающихся трансформатора включают каждый одну обмотку для передачи электрической мощности, необходимой для управления данным приводом, и одну обмотку для 5 10 15 20 25 30 35 40 45 50 55 16 передачи контрольного электрического сигнала положения стержня данного привода. В случае, когда в распоряжении имеется несколько промежуточных позиций рабочих лопаток вентилятора, необходимо размещать столько же вращающихся трансформаторов, сколько и приводов соответствующих подвижных упоров. Регулирующее устройство для изменения углов установки рабочих лопаток вентилятора турбодвигателя функционирует следующим образом. Когда рабочие лопатки находятся в определенном положении, прямоструйном или с направленной в обратную сторону струей, и упираются в неподвижный упор или подвижный упор, редуктор 3 приводит в действие вал 2 турбодвигателя и вал 2 приводит в действие'привод 17 блокирующего устройства 18 и рабочих лопаток 1. Рабочие лопатки удерживаются в неподвижном положении вокруг их продольной оси через посредство блокирующего устройства 18, установленного с помощью привода 17. Рабочие лопатки 1 приводят в действие зубчатое колесо 8 и ротор 7 электрического двигателя. Обмотка статора 5 электрического двигателя не подпитывается электрическим током. С целью изменения условий функционирования турбодвигателя осуществляется изменение угла установки рабочих лопаток с тем, чтобы их установить на другом подвижном или неподвижном упоре. Особый интерес представляет расположение трех позиций рабочих лопаток таким образом, что две позиции соответствуют двум режимам функционирования с прямой струей, а третья позиция соответствует рабочему режиму обратной струи. Два рабочих режима прямой струи могут соответствовать, например, этапу взлета и этапу полета, когда рабочие лопатки соответственно устанавливаются на первый крайний неподвижный упор и на промежуточный подвижный упор. В рабочем режиме обратной струи рабочие лопатки устанавливаются на второй крайний неподвижный упор. Изменение положения рабочих лопаток осуществляют по временной схеме, представленной на фиг. 14, отображающей переход от прямоструйной фазы к фазе обратной струи. Переход от прямоструййой фазы к фазе обратной струи осуществляется в соответствии с изобретением по способу, который включает этапы: 17 26462 а) измерение скорости вращения вала 2 турбодвигателя, б) проверки положения подвижного упора, в) блокирующего устройства, г) подачи питания к электрическому двигателю, д) создания между статором и ротором электродвигателя магнитного поля со скоростью вращения, отличающейся от скорости вращения вала вентилятора и обеспечивают возникновение магнитного момента, способного заблокировать рабочие лопатки вентилятора на затронутом неподвижном упоре при прямоструйном рабочем режиме с целью способствования разблокированию и удерживанию рабочих лопаток в прямоструйном положении во время процесса разблокирования, е) измерения магнитного момента для проверки правильного функционирования электродвигателя, ж) подачи питания в электромагнит 13 подвижного упора 12 с тем, чтобы последний втягивался внутрь, з) подачи питания к приводу 17 блокирующего устройства 18 с тем, чтобы стержень 19 привода 17 втягивался внутрь и блокирующее устройство 18 освободило опору 4 рабочей лопатки 1, и) изменения скорости вращающегося магнитного поля до появления обратного магнитного момента, вызывающего поворот рабочих лопаток вентилятора вокруг их продольной оси от прямоструйного положения до неподвижного упора, соответствующего положению режима обратной струи через посредство сцепления зубчатого колеса 8 с зубчатым сектором 9, к) проверки положения рабочих лопаток, л) прекращения подачи питания к подвижному упору с тем, чтобы предупредить несвоевременное возвращение рабочих лопаток в положение режима прямой струи в случае разрыва блокирующего устройства, м) прекращения подачи питания к блокирующей системе с целью блокирования опоры рабочих лопаток в положении обратной струи, н) прекращения питания электрического двигателя. На фиг. 15 представлена временная схема изменения положения лопаток для перехода от этапа взлета в этапу полета. Она аналогична схеме на фиг. 14, за исключением этапов (ж) и (л) способа, заключающегося в питании, соответствен 5 10 15 20 25 30 35 40 45 50 18 но прекращении питания, электромагнита 13 подвижного упора 12. Действительно, этот подвижный упор 12 должен оставаться на месте, так как именно здесь должны устанавливаться рабочие лопатки. Для возвращения в положение прямой струи процесс аналогичен. Единственное изменение касается скорости вращающегося магнитного поля и направления магнитного момента, образовавшегося в результате этого вращающегося поля, таким образом, чтобы перед подачей питания к блокирующему устройству удерживать опору рабочих лопаток, заблокированную на упоре, соответствующем положению обратной струи, и после подачи питания к блокирующему устройству вызвать вращение рабочих лопаток из положения обратной струи до подвижного упора, соответствующего прямой струе. В принципе, подача питания к электродвигателю необходима только на несколько секунд в соответствии с временем, необходимым для изменения положения рабочих лопаток. Однако, особенно выгодно располагать дополнительной безопасностью, позволяющей блокировать рабочие лопатки на механическом упоре в случае одновременного отказа всех систем блокирования. Такая безопасность достигается при отключении питания электродвигателя, если возникнет проблема одновременных поломок, с тем, чтобы создать вращающееся магнитное поле для постоянного блокирования рабочих лопаток на механическом упоре. С этой целью блокирующая система оснащена тремя уровнями безопасности, т. е. блокирующим устройством, позволяющим блокировать вращающиеся рабочие лопатки вокруг их продольной оси, подвижным упором, не дающим возможность рабочим лопаткам переходить из прямоструйного положения к положению обратной струи, вращающимся магнитным полем, позволяющим блокировать рабочие лопатки в случае одновременных поломок блокирующего устройства и подвижного упора. Настоящее изобретение не ограничено точно описанным способом исполнения, т. е. количество промежуточных лоложений не ограничено, и возможно раз55 мещать несколько подвижных упоров, соответствующих каждый различным положениям рабочих лопаток. Кроме того, система блокирования может удерживать одну или несколько опор рабочих лопаток в соответствии с требуемой надежностью. 26462 МИф . 6 С 26462 16 Фиг 5 Фиг 6 6' LZ "І § ^Є.„..т „ *5i" О 9E 8 миф J «J : I 'SE 26462 Амплитуда испытания Амплитуда перемещения подвижного стержня Фиг. 10 Фиг. 11 Фиг. 12 Фиг. 13 26462 Фиг. 15 Фиг 14 Упорядник Техред М. Келемеш Коректор О.Обручар Замовлення 508 Тираж Підписне Державне патентне відомство України, 254655, ГСП, Київ-53, Львівська пл., 8 Відкрите акціонерне товариство "Патент", м. Ужгород, вул. Гагаріна, 101 ж ч С
ДивитисяДодаткова інформація
Автори англійськоюFrancis Gerard
Автори російськоюФранси Жерар
МПК / Мітки
МПК: F04D 27/00
Мітки: регулювання, кутів, лопаток, робочих, змінення, вентилятора, пристрій, розташування, спосіб, турбодвигуна
Код посилання
<a href="https://ua.patents.su/16-26462-pristrijj-dlya-zminennya-kutiv-roztashuvannya-robochikh-lopatok-ventilyatora-turbodviguna-ta-sposib-regulyuvannya-ventilyatora-turbodviguna.html" target="_blank" rel="follow" title="База патентів України">Пристрій для змінення кутів розташування робочих лопаток вентилятора турбодвигуна та спосіб регулювання вентилятора турбодвигуна</a>
Пристрій для випробування лопаток робочих коліс осьових вентиляторів
Номер патенту: 5887
Опубліковано: 29.12.1994
Автори: Божко Олександр Євгенович, Федоров Олександр Іванович, Ляшенко Володимир Іванович
МПК: G01M 7/00
Мітки: пристрій, вентиляторів, випробування, коліс, осьових, лопаток, робочих
Формула / Реферат:
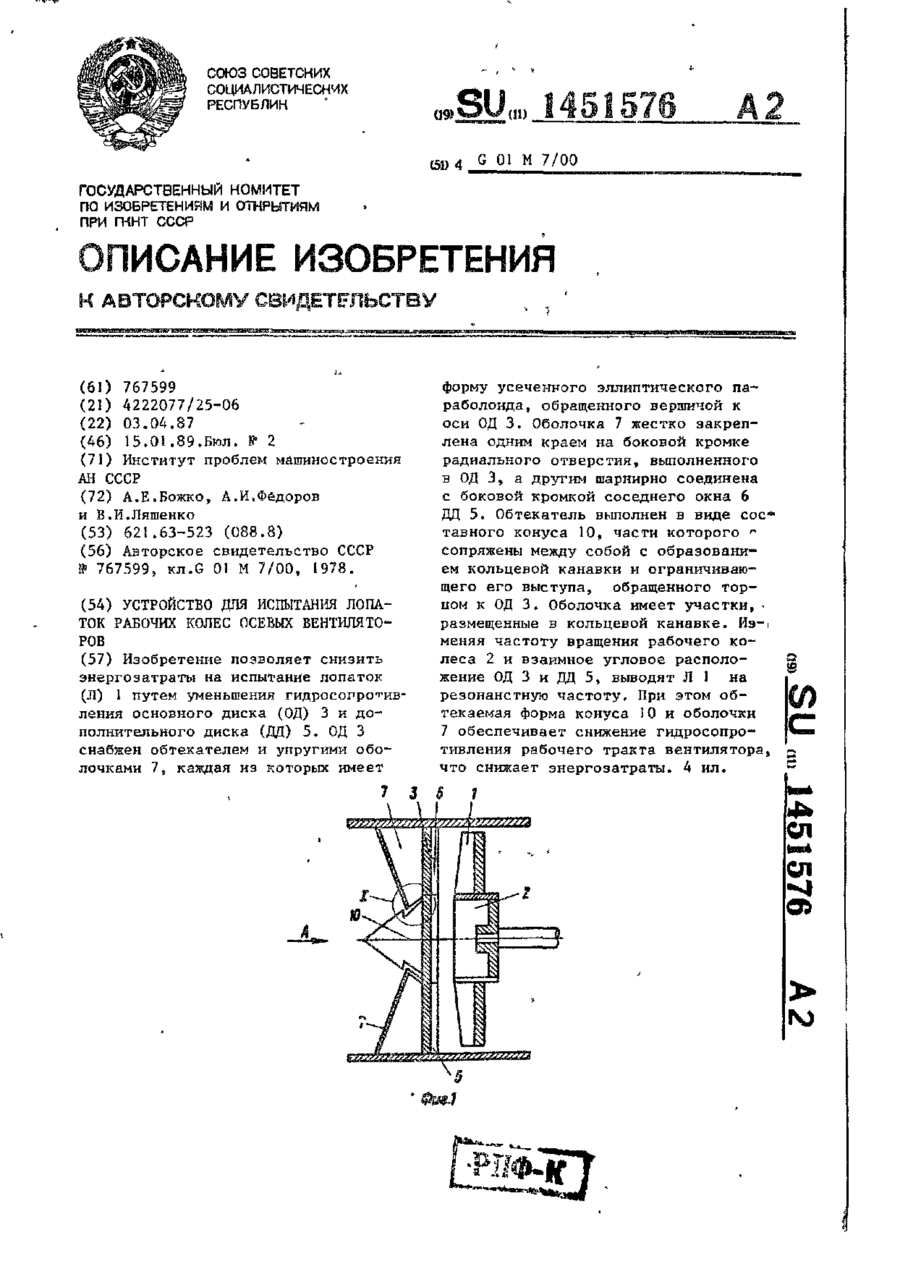
Устройство для испытания лопаток рабочих колес осевых вентиляторов по авт. св. №767599, отличающееся тем, что, с целью снижения энергозатрат, основной диск снабжен обтекателем и упругими оболочками, каждая из которых имеет форму части усеченного эллиптического параболоида, обращенного вершиной к оси диска, и жестко закреплена одним краем на боковой кромке радиального отверстия, а другим шарнирно соединена с боковой кромкой соседнего окна...
Спосіб виготовлення обичайки корпуса осьового вентилятора з граткою випрямляючих лопаток
Номер патенту: 18315
Опубліковано: 25.12.1997
Автори: Дудкін Віктор Євграфович, Іванов Сергій Сергійович, Ладік Валерій Григорович, Іванов Сергій Костянтинович
МПК: F04D 29/40
Мітки: обичайки, осьового, випрямляючих, вентилятора, граткою, спосіб, корпуса, лопаток, виготовлення
Формула / Реферат:
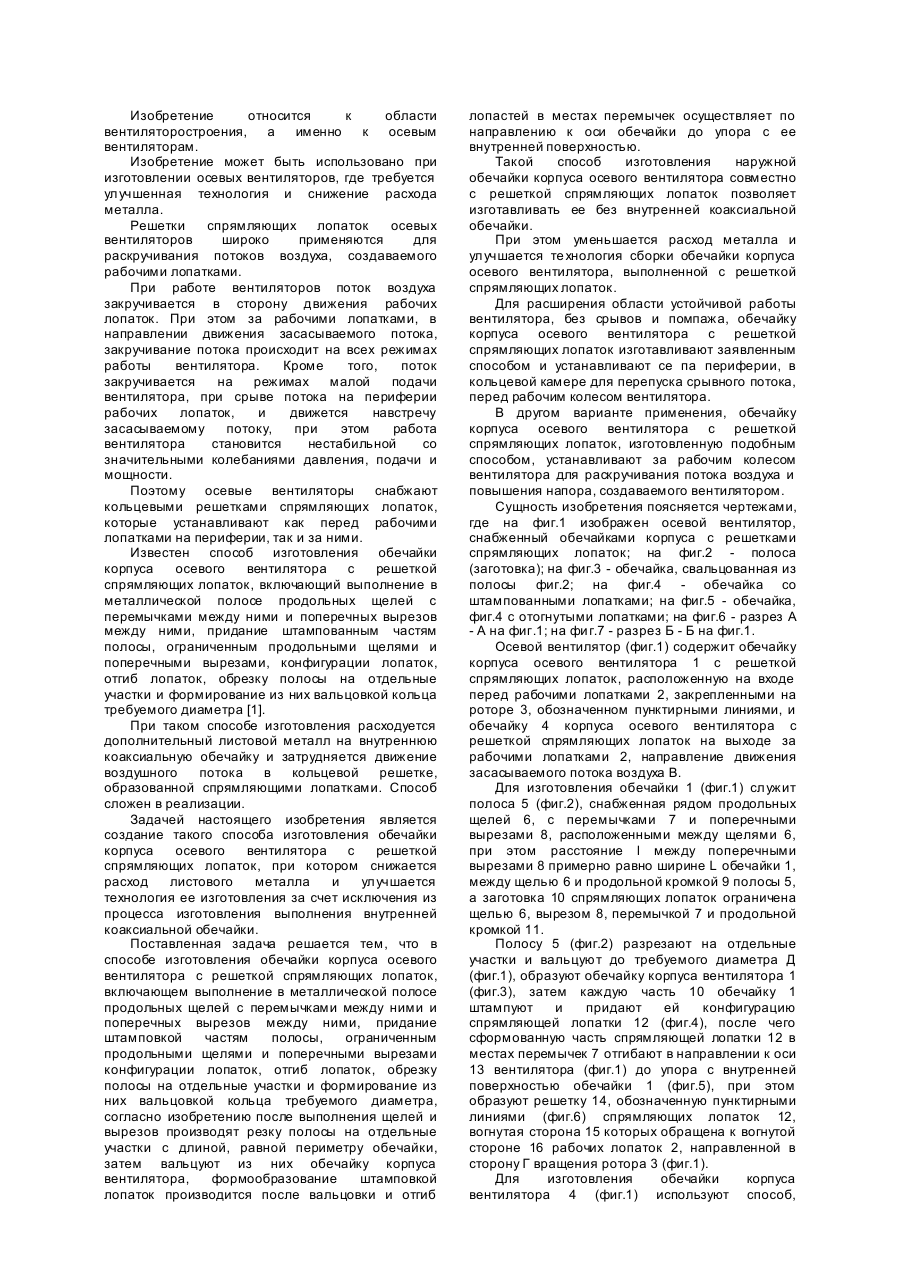
Способ изготовления обечайки корпуса осевого вентилятора с решеткой спрямляющих лопаток, включающий выполнение в металлической полосе продольных щелей с перемычками между ними и поперечных вырезов между ними, придание штамповкой частям полосы, ограниченным продольными щелями и поперечными вырезами, конфигурации лопаток, отгиб лопаток, обрезку полосы на отдельные участки и формирование из них вальцовкой кольца требуемого диаметра, отличающийся...
Механізм повороту лопаток осьового вентилятора

Номер патенту: 5500
Опубліковано: 28.12.1994
Автори: Клепаков Іван Васильович, Сенніков Віталій Федорович, Іванов Валентин Вікторович
МПК: F04D 29/32, F04D 27/00
Мітки: вентилятора, повороту, осьового, механізм, лопаток
Формула / Реферат:
Механизм поворота лопаток осевого вентилятора, содержащий привод, кинематически связанный при помощи упорного подшипника с корпусом ползуна, установленного на валу вентилятора с перестановочным диском, кинематически связанным с хвостовиками лопаток, отличающийся тем, что кинематическая связь между приводом и перестановочным диском снабжена рейкой с фиксатором, закрепленной на корпусе подшипника, и взаимодействующей с ней шестерней,...
Бандаж робочих лопаток колеса парової турбіни
Номер патенту: 7152
Опубліковано: 30.06.1995
Автори: Житін Владлен Іванович, Яковлев Валентин Костянтинович
МПК: F01D 5/12
Мітки: парової, бандаж, колеса, лопаток, турбіни, робочих
Формула / Реферат:
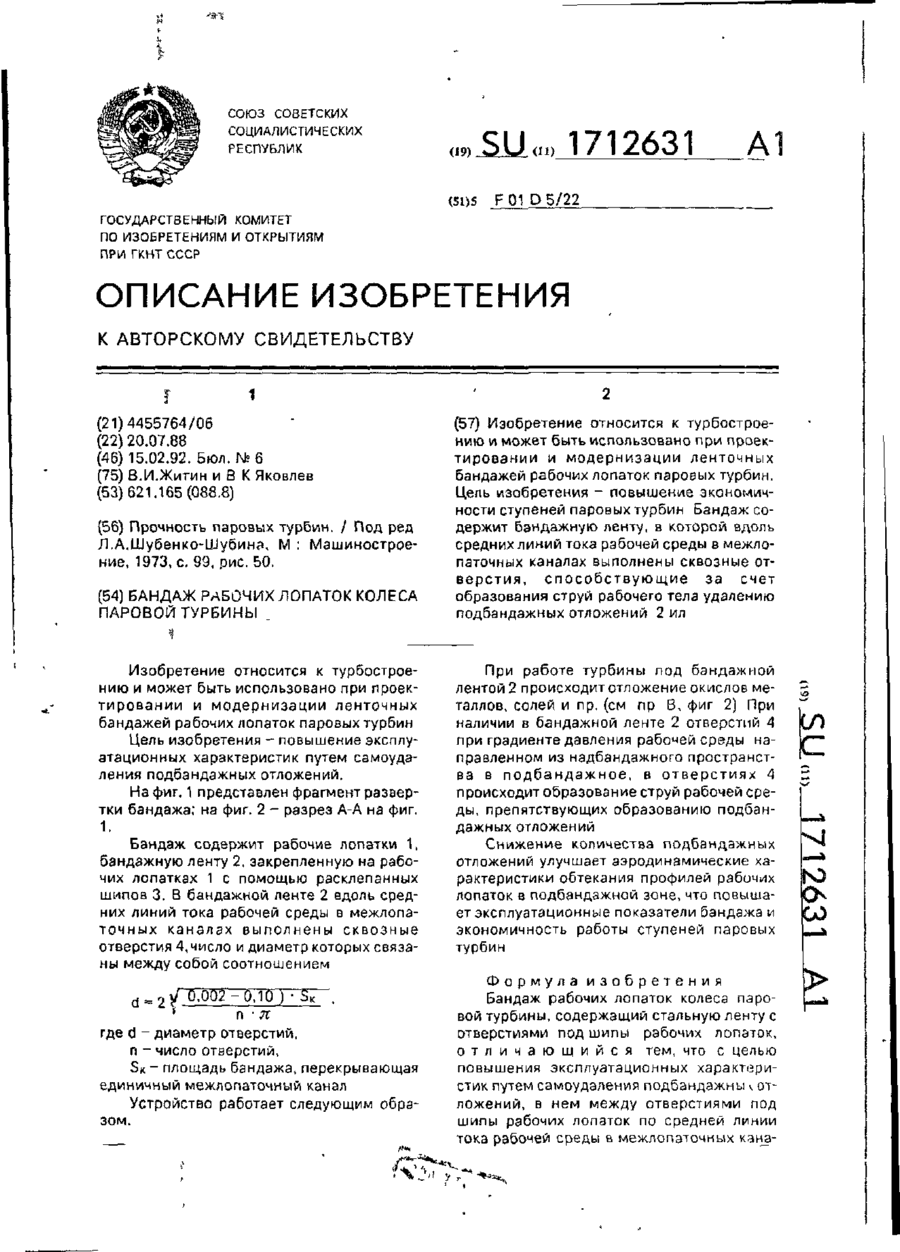
Бандаж рабочих лопаток колеса паровой турбины, содержащий стальную ленту с отверстиями под шипы рабочих лопаток, отличающийся тем, что, с целью повышения эксплуатационных характеристик путем самоудаления подбандажных отложении, в нем между отверстиями под шипы рабочих лопаток по средней линии тока рабочей среды в межлопаточных каналах выполнены сквозные отверстия, диаметр и число которых связаны между собой соотношениемгде d...
Робоче колесо реверсивного вентилятора
Номер патенту: 12833
Опубліковано: 28.02.1997
Автор: Федюшкін Анатолій Михайлович
МПК: F04D 29/32
Мітки: реверсивного, робоче, колесо, вентилятора
Формула / Реферат:
(57) Рабочее колесо реверсивного вентилятора, содержащее лопатки, каждая из которых имеет профиль в виде дуги окружности, симметричной относительно продольной оси лопатки, причем лопатки установлены под углом 0-5° к плоскости вращения колеса, хорда лопаток равна 0,30-0,65 диаметра рабочего колеса, а максимальная стрела прогиба равна 0,10-0,30 диаметра рабочего колеса, отличающееся тем, что цилиндрическая поверхность двух диаметрально...
Попередній патент: Освітлювальна система для оптичних елементів, проекторів та фотозбільшувачів
Наступний патент: Біогазогенератор побутовий дутчака
Випадковий патент: Ендопротез плечового суглоба