Система керування роботою групи насосних агрегатів станції водопостачання міст
Номер патенту: 83974
Опубліковано: 10.10.2013
Автори: Якимчук Наталія Миколаївна, Селепина Йосип Романович

Формула / Реферат
1. Система керування роботою групи насосних агрегатів станції водопостачання міст, що містить промисловий мікроконтролер та групу регульованих асинхронних електроприводів з перетворювачами частоти та групи нерегульованих електроприводів, насоси, виходи яких підключені до магістрального водопроводу, зворотні зв'язки по виміряних значеннях витрат води та тиску, що подані на входи промислового мікроконтролера, виходи якого підключені до перетворювачів частоти і схем керування асинхронних двигунів, яка відрізняється тим, що у промисловому мікроконтролері сформовані на основі виміряних в часі значень витрат води два сигнали, перший з яких - динамічний швидкодіючий, дорівнює виміряному середньому значенню відхилень витрат води за час t, а другий з них статичний, повільно діючий дорівнює виміряному середньому значенню відхилень витрат води за час Т, причому Т>>t.
2. Система за п. 1, яка відрізняється тим, що вимірювання середніх значень води за час t, T проводяться промисловим контролером (мікропроцесором) за формулами t = Δt•N1 і час Т=Δt•N2, де Δt - інтервал часу, а N1, N2 - числа квантованих в часі мікропроцесором ітерацій.
Текст
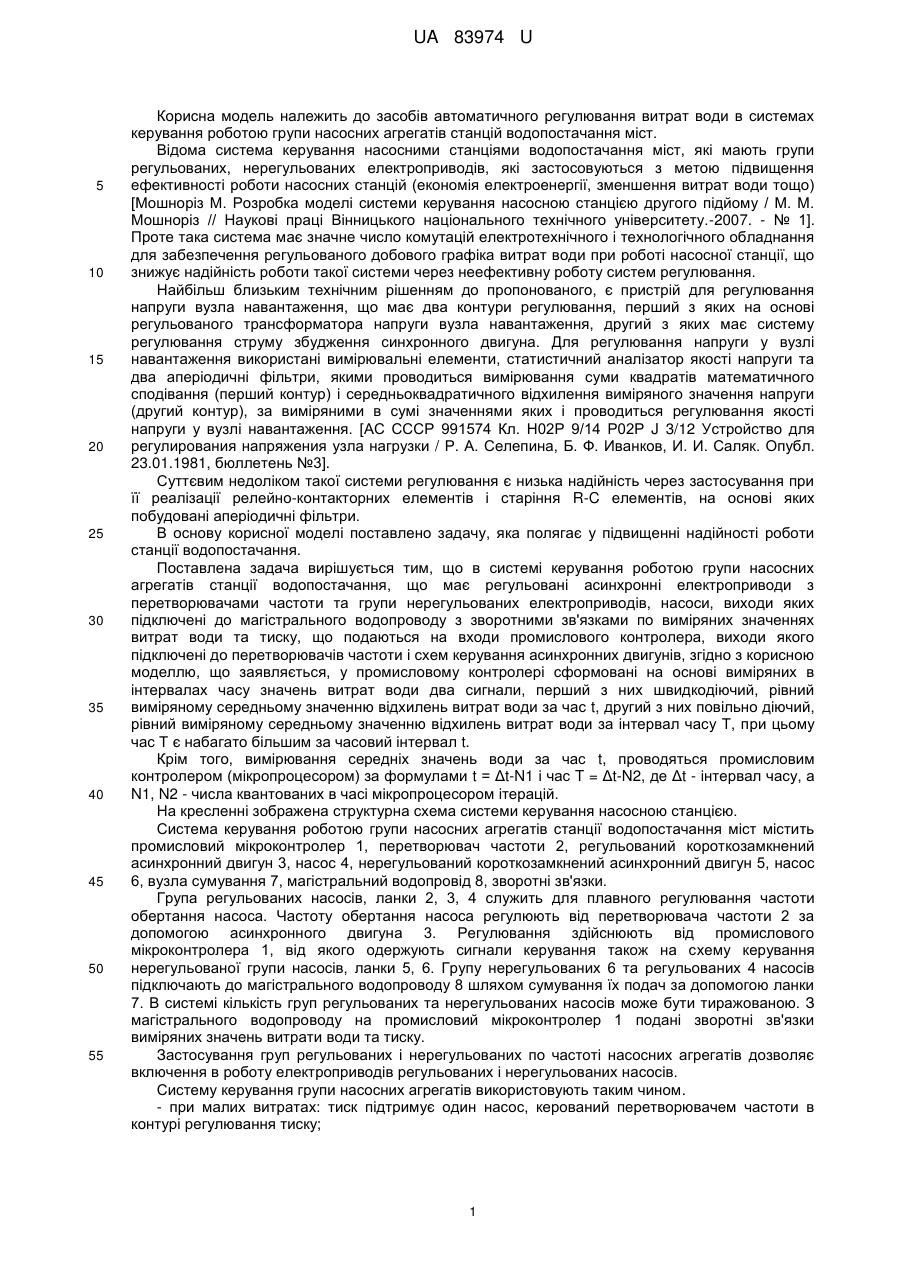
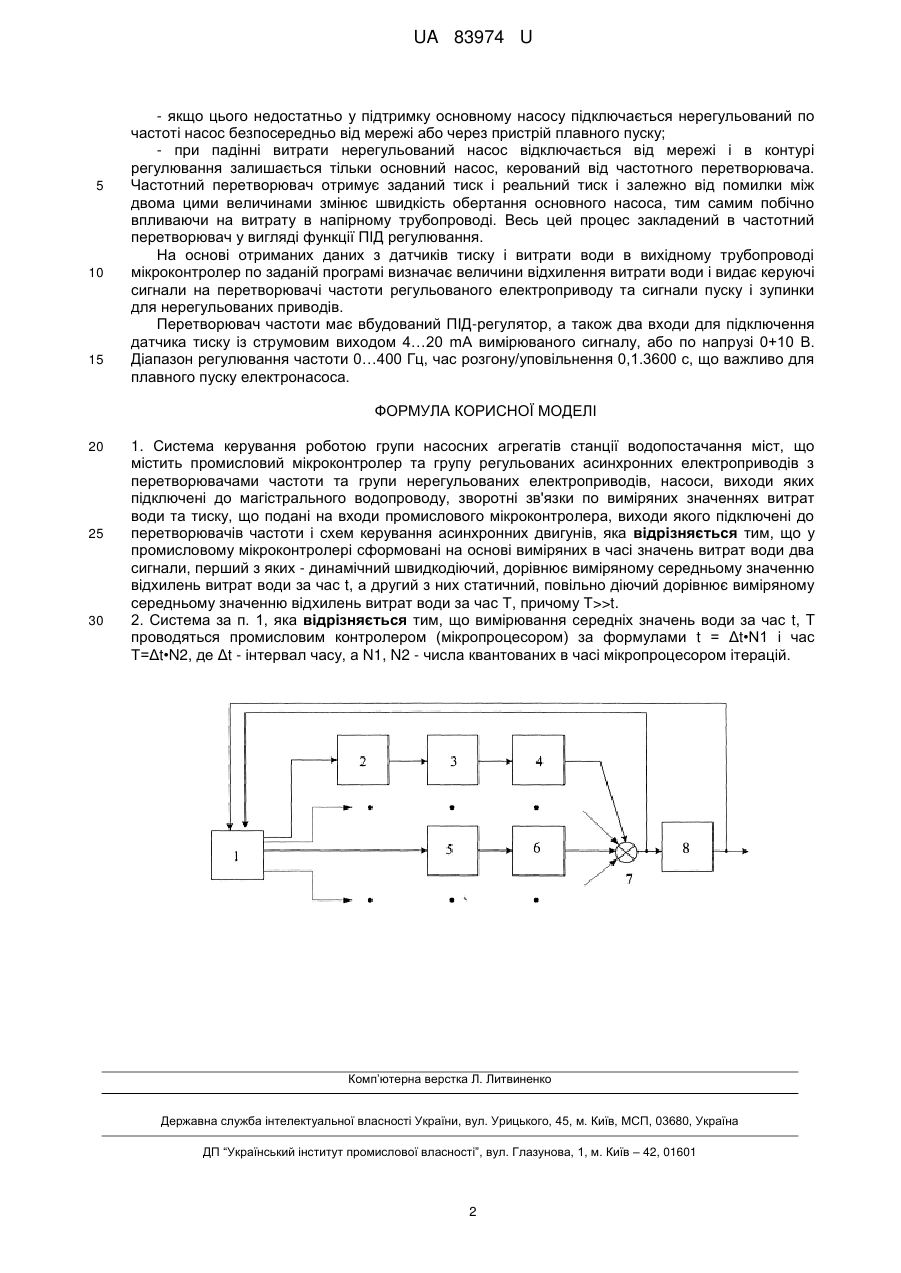
Реферат: Система керування роботою групи насосних агрегатів станції водопостачання міст містить промисловий мікроконтролер та групу регульованих асинхронних електроприводів з перетворювачами частоти та групи нерегульованих електроприводів, насоси, виходи яких підключені до магістрального водопроводу, зворотні зв'язки по виміряних значеннях витрат води та тиску, що подані на входи промислового мікроконтролера, виходи якого підключені до перетворювачів частоти і схем керування асинхронних двигунів. У промисловому мікроконтролері сформовані на основі виміряних в часі значень витрат води два сигнали, перший з яких - динамічний швидкодіючий, дорівнює виміряному середньому значенню відхилень витрат води за час t, а другий з них статичний, повільно діючий дорівнює виміряному середньому значенню відхилень витрат води за час Т, причому Т>>t. UA 83974 U (54) СИСТЕМА КЕРУВАННЯ РОБОТОЮ ГРУПИ НАСОСНИХ АГРЕГАТІВ СТАНЦІЇ ВОДОПОСТАЧАННЯ МІСТ UA 83974 U UA 83974 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до засобів автоматичного регулювання витрат води в системах керування роботою групи насосних агрегатів станцій водопостачання міст. Відома система керування насосними станціями водопостачання міст, які мають групи регульованих, нерегульованих електроприводів, які застосовуються з метою підвищення ефективності роботи насосних станцій (економія електроенергії, зменшення витрат води тощо) [Мошноріз М. Розробка моделі системи керування насосною станцією другого підйому / М. М. Мошноріз // Наукові праці Вінницького національного технічного університету.-2007. - № 1]. Проте така система має значне число комутацій електротехнічного і технологічного обладнання для забезпечення регульованого добового графіка витрат води при роботі насосної станції, що знижує надійність роботи такої системи через неефективну роботу систем регулювання. Найбільш близьким технічним рішенням до пропонованого, є пристрій для регулювання напруги вузла навантаження, що має два контури регулювання, перший з яких на основі регульованого трансформатора напруги вузла навантаження, другий з яких має систему регулювання струму збудження синхронного двигуна. Для регулювання напруги у вузлі навантаження використані вимірювальні елементи, статистичний аналізатор якості напруги та два аперіодичні фільтри, якими проводиться вимірювання суми квадратів математичного сподівання (перший контур) і середньоквадратичного відхилення виміряного значення напруги (другий контур), за виміряними в сумі значеннями яких і проводиться регулювання якості напруги у вузлі навантаження. [АС СССР 991574 Кл. Н02Р 9/14 Р02Р J 3/12 Устройство для регулирования напряжения узла нагрузки / Р. А. Селепина, Б. Ф. Иванков, И. И. Саляк. Опубл. 23.01.1981, бюллетень №3]. Суттєвим недоліком такої системи регулювання є низька надійність через застосування при її реалізації релейно-контакторних елементів і старіння R-C елементів, на основі яких побудовані аперіодичні фільтри. В основу корисної моделі поставлено задачу, яка полягає у підвищенні надійності роботи станції водопостачання. Поставлена задача вирішується тим, що в системі керування роботою групи насосних агрегатів станції водопостачання, що має регульовані асинхронні електроприводи з перетворювачами частоти та групи нерегульованих електроприводів, насоси, виходи яких підключені до магістрального водопроводу з зворотними зв'язками по виміряних значеннях витрат води та тиску, що подаються на входи промислового контролера, виходи якого підключені до перетворювачів частоти і схем керування асинхронних двигунів, згідно з корисною моделлю, що заявляється, у промисловому контролері сформовані на основі виміряних в інтервалах часу значень витрат води два сигнали, перший з них швидкодіючий, рівний виміряному середньому значенню відхилень витрат води за час t, другий з них повільно діючий, рівний виміряному середньому значенню відхилень витрат води за інтервал часу Т, при цьому час Т є набагато більшим за часовий інтервал t. Крім того, вимірювання середніх значень води за час t, проводяться промисловим контролером (мікропроцесором) за формулами t = Δt-N1 і час T = Δt-N2, де Δt - інтервал часу, а N1, N2 - числа квантованих в часі мікропроцесором ітерацій. На кресленні зображена структурна схема системи керування насосною станцією. Система керування роботою групи насосних агрегатів станції водопостачання міст містить промисловий мікроконтролер 1, перетворювач частоти 2, регульований короткозамкнений асинхронний двигун3, насос 4, нерегульований короткозамкнений асинхронний двигун 5, насос 6, вузла сумування 7, магістральний водопровід 8, зворотні зв'язки. Група регульованих насосів, ланки 2, 3, 4 служить для плавного регулювання частоти обертання насоса. Частоту обертання насоса регулюють від перетворювача частоти 2 за допомогою асинхронного двигуна 3. Регулювання здійснюють від промислового мікроконтролера 1, від якого одержують сигнали керування також на схему керування нерегульованої групи насосів, ланки 5, 6. Групу нерегульованих 6 та регульованих 4 насосів підключають до магістрального водопроводу 8 шляхом сумування їх подач за допомогою ланки 7. В системі кількість груп регульованих та нерегульованих насосів може бути тиражованою. З магістрального водопроводу на промисловий мікроконтролер 1 подані зворотні зв'язки виміряних значень витрати води та тиску. Застосування груп регульованих і нерегульованих по частоті насосних агрегатів дозволяє включення в роботу електроприводів регульованих і нерегульованих насосів. Систему керування групи насосних агрегатів використовують таким чином. - при малих витратах: тиск підтримує один насос, керований перетворювачем частоти в контурі регулювання тиску; 1 UA 83974 U 5 10 15 - якщо цього недостатньо у підтримку основному насосу підключається нерегульований по частоті насос безпосередньо від мережі або через пристрій плавного пуску; - при падінні витрати нерегульований насос відключається від мережі і в контурі регулювання залишається тільки основний насос, керований від частотного перетворювача. Частотний перетворювач отримує заданий тиск і реальний тиск і залежно від помилки між двома цими величинами змінює швидкість обертання основного насоса, тим самим побічно впливаючи на витрату в напірному трубопроводі. Весь цей процес закладений в частотний перетворювач у вигляді функції ПІД регулювання. На основі отриманих даних з датчиків тиску і витрати води в вихідному трубопроводі мікроконтролер по заданій програмі визначає величини відхилення витрати води і видає керуючі сигнали на перетворювачі частоти регульованого електроприводу та сигнали пуску і зупинки для нерегульованих приводів. Перетворювач частоти має вбудований ПІД-регулятор, а також два входи для підключення датчика тиску із струмовим виходом 4…20 mА вимірюваного сигналу, або по напрузі 0+10 В. Діапазон регулювання частоти 0…400 Гц, час розгону/уповільнення 0,1.3600 с, що важливо для плавного пуску електронасоса. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 1. Система керування роботою групи насосних агрегатів станції водопостачання міст, що містить промисловий мікроконтролер та групу регульованих асинхронних електроприводів з перетворювачами частоти та групи нерегульованих електроприводів, насоси, виходи яких підключені до магістрального водопроводу, зворотні зв'язки по виміряних значеннях витрат води та тиску, що подані на входи промислового мікроконтролера, виходи якого підключені до перетворювачів частоти і схем керування асинхронних двигунів, яка відрізняється тим, що у промисловому мікроконтролері сформовані на основі виміряних в часі значень витрат води два сигнали, перший з яких - динамічний швидкодіючий, дорівнює виміряному середньому значенню відхилень витрат води за час t, а другий з них статичний, повільно діючий дорівнює виміряному середньому значенню відхилень витрат води за час Т, причому Т>>t. 2. Система за п. 1, яка відрізняється тим, що вимірювання середніх значень води за час t, T проводяться промисловим контролером (мікропроцесором) за формулами t = Δt•N1 і час Т=Δt•N2, де Δt - інтервал часу, а N1, N2 - числа квантованих в часі мікропроцесором ітерацій. Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: H02P 9/14
Мітки: керування, система, агрегатів, роботою, водопостачання, міст, групи, станції, насосних
Код посилання
<a href="https://ua.patents.su/4-83974-sistema-keruvannya-robotoyu-grupi-nasosnikh-agregativ-stanci-vodopostachannya-mist.html" target="_blank" rel="follow" title="База патентів України">Система керування роботою групи насосних агрегатів станції водопостачання міст</a>
Спосіб керування електродвигунами насосних агрегатів станції водопостачання
Номер патенту: 74429
Опубліковано: 25.10.2012
Автори: Михайличенко Дмитро Анатолієвич, Мажейкіс Ірина Едвардівна, Лісний Микола Іванович
МПК: E03B 5/00, F04D 15/00
Мітки: агрегатів, спосіб, водопостачання, керування, електродвигунами, станції, насосних
Формула / Реферат:
Спосіб керування електродвигунами насосних агрегатів станції водопостачання, який полягає у вимірюванні напору води на виході основного насосу та порівнянні вимірюваного напору із заданим значенням та мінімізації відхилень вимірюваного напору від заданого значення шляхом впливу на частоту обертання електродвигуна насосу, який відрізняється тим, що при зменшенні поточного значення напору на виході та максимальній продуктивності основного...
Система пуску насосних агрегатів для підйому води у магістральний трубопровід
Номер патенту: 57751
Опубліковано: 10.03.2011
Автори: Костюк Степан Лукьянович, Нікулін Микола Іванович, Черних Владислав Миколайович, Шумейко Григорій Іванович
МПК: F04B 23/00, E03B 1/00
Мітки: трубопровід, води, агрегатів, насосних, магістральний, підйому, пуску, система
Формула / Реферат:
1. Система пуску насосних агрегатів для підйому води у магістральний трубопровід, яка містить резервуари чистої води, насосні станції підйому води, де встановлені насосні агрегати з напірними трубопроводами, яка відрізняється тим, що насосні агрегати на насосних станціях встановлені зменшувальною енергоємністю, а до напірних трубопроводів насосних агрегатів виконані сполучні перемички із запірно-регулюючим пристроєм, причому кожний окремий...
Спосіб роботи системи насосних станцій для водопостачання
Номер патенту: 47580
Опубліковано: 10.02.2010
Автори: Нікулін Микола Іванович, Костюк Степан Лукьянович, Волик Лариса Григорівна, Черних Владислав Миколайович
МПК: E03B 7/00
Мітки: станцій, системі, насосних, спосіб, водопостачання, роботи
Формула / Реферат:
1. Спосіб роботи системи насосних станцій для водопостачання, що полягає у підйомі води насосними агрегатами насосної станції підйому води, який відрізняється тим, що насосні агрегати піднімають воду із підземних свердловин та заповнюють резервуари чистої води, які встановлюють на насосній станції другого підйому води, насосні агрегати якої перекачують воду у резервуари чистої води, які встановлюють на насосній станції третього підйому води,...
Система керування роботою модуля нагріву
Номер патенту: 61942
Опубліковано: 10.08.2011
Автори: Степанов Микола Васильович, Мороз Петро Микитович
МПК: F24H 1/00
Мітки: система, роботою, керування, модуля, нагріву
Формула / Реферат:
1. Система керування роботою модуля нагріву, що приєднаний трубопроводами до пластинчастого теплообмінника системи гарячого водопостачання будинку, яка відрізняється тим, що містить електронний блок, який виконаний з можливістю керування одночасним або поступовим вмиканням/вимиканням окремих нагрівальних елементів модуля нагріву в залежності від різниці заданої та поточної витрати води через пластинчастий теплообмінник і швидкості зміни цієї...
Система замкненого оборотного водопостачання технологічних агрегатів металургійного виробництва
Номер патенту: 69210
Опубліковано: 25.04.2012
Автори: Дорофєєв Олександр Вікторович, Ємченко Андрій Валентинович, Поляков Віктор Анатолійович, Івченко Владислав Володимирович, Куфаєв Олег Миколайович, Лозицький Юрій Володимирович, Боб Олександр Петрович, Крикунов Борис Петрович, Яковенко Анатолій Тимофійович
МПК: E03B 7/00
Мітки: водопостачання, технологічних, металургійного, виробництва, агрегатів, оборотного, система, замкненого
Формула / Реферат:
Система замкненого оборотного водопостачання технологічних агрегатів металургійного виробництва, що містить послідовно встановлені систему освітлення води, що відходить від технологічних агрегатів металургійного виробництва, обладнану відстійником з підводом води на освітлення зверху, систему фільтрування освітленої води, що оснащена приймальним резервуаром освітленої води, насосною станцією та фільтрувальним блоком, і водовід для подачі...
Попередній патент: Спосіб формування стравохідно-шлункового анастомозу за допомогою вісімкоподібних швів при хірургічному лікуванні раку стравоходу
Наступний патент: Шинка варена з м’ясом оленя
Випадковий патент: Установка для підготовки метановмісного газу вугільних родовищ для використання в теплових двигунах