Чотиривісне монтування для спостереження небесних об’єктів
Номер патенту: 86220
Опубліковано: 25.12.2013
Автори: Благодир Ярослав Тимофійович, Мартинюк-Лотоцький Костянтин Павлович, Стоділка Мирон Іванович, Дейнека Ростислав Михайлович, Білінський Андрій Іванович, Вовчик Єва Богданівна



Формула / Реферат
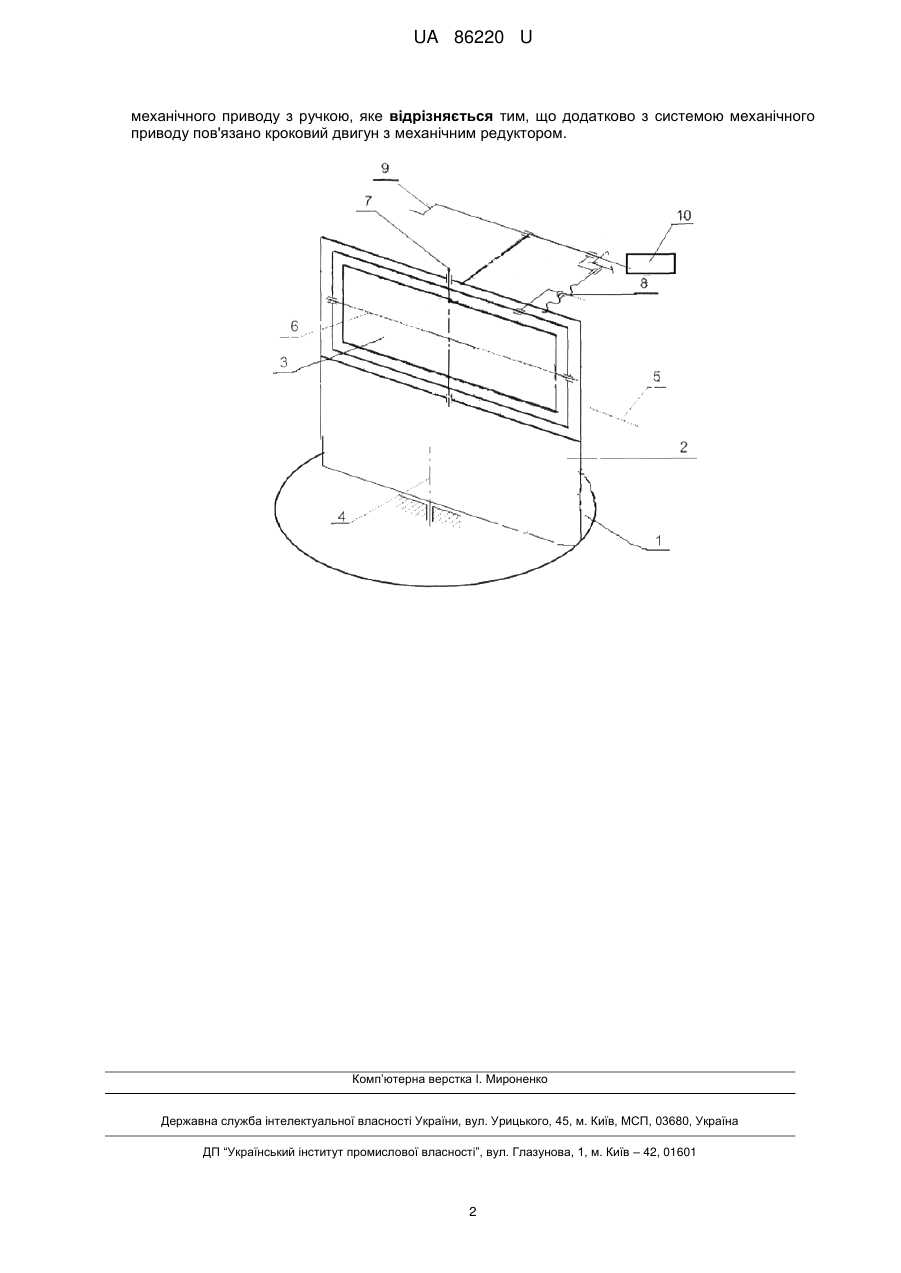
Чотиривісне монтування для спостереження небесних об'єктів, що містить круглу основу повороту навколо осі азимуту, механічно зв'язану з ним раму повороту навколо осі висоти, з якою механічно зв'язано раму повороту навколо осі Бета, яка в свою чергу зв'язана з системою механічного приводу з ручкою, яке відрізняється тим, що додатково з системою механічного приводу пов'язано кроковий двигун з механічним редуктором.
Текст
Реферат: Чотиривісне монтування для спостереження небесних об'єктів, містить круглу основу повороту навколо осі азимута, механічно зв'язану з ним раму повороту навколо осі висоти, з якою механічно зв'язано раму повороту навколо осі Бета, яка в свою чергу зв'язана з системою механічного приводу з ручкою. Додатково з системою механічного приводу пов'язано кроковий двигун з механічним редуктором. UA 86220 U (12) UA 86220 U UA 86220 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі приладобудування, пристроїв, монтувань та підставок для спостереження небесних об'єктів, зокрема швидкорухомих штучних супутників Землі та космічного сміття. Найближчим за технічною суттю - прототипом є чотиривісне монтування для спостереження небесних об'єктів, що містить круглу основу повороту навколо осі азимута, механічно зв'язану з ним раму повороту навколо осі висоти, з якою механічно зв'язано раму повороту навколо осі Бета, яка у свою чергу зв'язана зі системою механічного приводу з ручкою (Четырехосный полуавтоматический спутниковый лазерный дальномер ЛД-2. Техническое описание. Инструкция по эксплуатации. Альбом 1. г. Рига, 1986 г.). Але в цьому чотиривісному монтуванні для спостереження небесних об'єктів рух по осі Бета здійснюється ручкою, що не дає змоги коректувати кут повороту по осі Бета під час спостереження. В основу корисної моделі поставлено задачу удосконалити чотиривісне монтування для спостереження небесних об'єктів шляхом використання крокового двигуна з механічним редуктором, яке дало би змогу проводити коректування кута повороту по осі Бета безпосередньо під час спостереження. Поставлена задача вирішується тим, що в чотиривісному монтуванні для спостереження небесних об'єктів, що містить круглу основу повороту навколо осі азамута, механічно зв'язану з ним раму повороту навколо осі висоти, з якою механічно зв'язано раму повороту навколо осі Бета, яка в свою чергу зв'язана з системою механічного приводу з ручкою, згідно з корисною моделлю, додатково з системою механічного приводу пов'язано кроковий двигун з механічним редуктором. Пристрій з встановленим кроковим двигуном з механічним редуктором як двигуном для коректування повороту по осі Бета має значно більш плавний рух з більшою точністю та ширший динамічний діапазон швидкостей. Плавність руху та ширший діапазон швидкостей обертання отримується завдяки тому, що частота обертання мотора пропорційна частоті вхідних імпульсів, що дає можливість досягнення дуже малих швидкостей обертання з великою точністю. Такий пристрій дозволяє проводити корекцію кута по осі Бета безпосередньо під час проведення спостережень Перші пробні спостереження небесних об'єктів типу штучних супутників Землі підтвердили можливість коректування кута по осі Бета під час проведення спостережень. Креслення. Блок-схема чотиривісного монтування для спостереження небесних об'єктів, де 1 - кругла основа повороту, 2 - рама повороту осі висоти, 3 - рама повороту навколо осі Бета, 4 вісь азимутів, 5 - вісь висоти, 6 - вісь Бета, 7 - вісь орбітального переміщення, 8 - механічний привід переміщення по осі Бета, 9 - ручка переміщення по осі Бета, 10 - кроковий двигун переміщення по осі Бета з механічним редуктором. Чотиривісне монтування для спостереження небесних об'єктів, що містить круглу основу повороту 1 навколо осі азамута 4, механічно зв'язану з ним раму повороту 2 навколо осі висоти 5, з якою механічно зв'язано раму повороту 3 навколо осі Бета 6, яка в свою чергу зв'язана з механічним приводом переміщення по осі Бета 8 з ручкою переміщення по осі Бета 9, а з механічним приводом переміщення по осі Бета пов'язано кроковий двигун переміщення по осі Бета з механічним редуктором 10. Пристрій працює так. Перед початком спостереження розраховуються робочі дані азамута, висоти та кута Бета, які встановлюються на чотиривісному монтуванні для спостереження небесних об'єктів. Азимут встановлюють на круглій основі азамута 1, обертаючи пристрій навколо осі азамута 4. Обертаючи чотиривісне монтування навколо осі висоти 5 встановлюють робоче значення висоти на рамі висоти 2. Робоче значення кута Бета встановлюють на рамі осі Бета 3, повертаючи пристрій навколо осі Бета 6. У момент початку роботи монтування починає рухатись і при непопаданні спостережуваного об'єкту в поле зору вмикається кроковий двигун переміщення по осі Бета з механічним редуктором 10, який через механічний привід переміщення по осі Бета 8 встановлює правильне значення кута Бета на рамі повороту навколо осі Бета 3. Після закінчення роботи виключається живлення крокового двигуна і пристрій зупиняється. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Чотиривісне монтування для спостереження небесних об'єктів, що містить круглу основу повороту навколо осі азимута, механічно зв'язану з ним раму повороту навколо осі висоти, з якою механічно зв'язано раму повороту навколо осі Бета, яка в свою чергу зв'язана з системою 1 UA 86220 U механічного приводу з ручкою, яке відрізняється тим, що додатково з системою механічного приводу пов'язано кроковий двигун з механічним редуктором. Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюBlahodyr Yaroslav Timofiiovych, Bilinskyi Andrii Ivanovych, Vovchyk Yeva Bohdanivna, Deineka Rostyslav Mykhailovych, Martyniuk-Lototskyi Kostiantyn Pavlovych
Автори російськоюБлагодыр Ярослав Тимофеевич, Билинский Андрей Иванович, Вовчик Ева Богдановна, Дейнека Ростислав Михайлович, Мартынюк-Лотоцкий Константин Павлович
МПК / Мітки
МПК: G02B 23/16
Мітки: чотиривісне, небесних, монтування, спостереження, об'єктів
Код посилання
<a href="https://ua.patents.su/4-86220-chotirivisne-montuvannya-dlya-sposterezhennya-nebesnikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Чотиривісне монтування для спостереження небесних об’єктів</a>
Чотиривісне монтування для відслідковування швидкорухомих небесних об’єктів

Номер патенту: 58664
Опубліковано: 26.04.2011
Автори: Благодир Ярослав Тимофійович, Мартинюк-Лотоцький Костянтин Павлович, Дейнека Ростислав Михайлович, Білінський Андрій Іванович, Вовчик Єва Богданівна
МПК: G02B 23/16
Мітки: небесних, чотиривісне, об'єктів, монтування, відслідковування, швидкорухомих
Формула / Реферат:
Чотиривісне монтування для відслідковування швидкорухомих небесних об'єктів, що містить круг повороту навколо осі азимута, механічно зв'язану з ним раму висоти повороту навколо осі висоти, з якою механічно зв'язано раму повороту навколо осі Бета, яка в свою чергу механічно зв'язана з кругом орбітального переміщення навколо орбітальної осі з системою механічного приводу та двигуном орбітального переміщення, який відрізняється тим, що двигун...
Телескоп-гід чотиривісного монтування для відслідковування швидкорухомих небесних об’єктів

Номер патенту: 62831
Опубліковано: 12.09.2011
Автори: Дейнека Ростислав Михайлович, Благодир Ярослав Тимофійович, Вовчик Єва Богданівна, Мартинюк-Лотоцький Костянтин Павлович, Білінський Андрій Іванович
МПК: G02B 23/16
Мітки: об'єктів, відслідковування, швидкорухомих, чотиривісного, телескоп-гід, монтування, небесних
Формула / Реферат:
Телескоп-гід чотиривісного монтування для відслідковування швидкорухомих небесних об'єктів, що виконаний у вигляді металевого циліндра, який зв'язаний з окуляром, встановленим на осі металевого циліндра, який відрізняється тим, що між металевим циліндром і окуляром прикріплена прямокутна пластина, яка зв'язана з окуляром і має додатковий круглий отвір з центром, призначений для кріпленням другого окуляра, і встановлена з можливістю обертання...
Спектрометр-поляриметр для досліджень небесних об`єктів

Номер патенту: 85466
Опубліковано: 26.01.2009
Автори: Гринюк Ігор Євгенович, Брух Георгій Андрійович, Титаренко Іван Титович, Пасько Ігор Матвійович
Мітки: спектрометр-поляриметр, небесних, об'єктів, досліджень
Формула / Реферат:
1. Спектрометр-поляриметр для досліджень небесних об'єктів, який містить об'єктив для формування зображення небесних об'єктів, аналізатор, який включає в себе поляризаційну призму, і фазовий елемент, який обертається за допомогою електроприводу, коліматор, який включає в себе об'єктив і діафрагму, проекційний об'єктив, диспергуючий елемент, фотоприймач і заслінку, який відрізняється тим, що додатково має оптичну призму між диспергуючим...
Пристрій для оптичного спостереження й спосіб спостереження за об’єктами з високою температурою
Номер патенту: 69480
Опубліковано: 15.09.2004
Автор: Чанг Цій-Шу
МПК: H04N 7/18
Мітки: об'єктами, високою, оптичного, пристрій, спостереження, температурою, спосіб
Формула / Реферат:
1. Оптична система для формування зображення поверхні певного об'єкта, що має певний характерний превалюючий спектр власного електромагнітного випромінювання, який залежить від температури, яка включає в себе: джерело електромагнітного випромінювання для спрямовування електромагнітного проміння на зазначений об'єкт; детектор електромагнітного проміння, який селективно виявляє певну спектральну складову зазначеного спрямованого...
Деталь для швидкого монтування каркаса для закріплення облицювального матеріалу на стіни та стелі
Номер патенту: 40610
Опубліковано: 27.04.2009
Автор: Тараненко Юрій Вікторович
МПК: E06B 3/00
Мітки: стіни, каркаса, монтування, деталь, матеріалу, швидкого, облицювального, стелі, закріплення
Формула / Реферат:
Деталь для швидкого монтування каркаса для закріплення облицювального матеріалу на стіни та стелі, яка відрізняється тим, що її елементи виконані з профілів П-подібного перерізу та рухомі один відносно одного у висоту, завдяки їх з'єднанню за принципом телескопа.
Попередній патент: Спосіб отримання мета-динітробензолу
Наступний патент: Спосіб застосування добрив на насіннєвих посівах люцерни
Випадковий патент: Кран кульовий кутовий