Динамограф

Формула / Реферат
1. Динамограф, що має напрямну раму, пристрої кріплення до знаряддя й до засобу тяги, з'єднані між собою за допомогою пристрою виміру зусилля із пружиною стиску, і пристрій фіксації результатів вимірювання на носій, який відрізняється тим, що напрямна рама виконана у вигляді двох взаємно перпендикулярних рамок, несучої і тягової, причому несуча рамка виконана у вигляді двох напрямних, сполучної планки, несучої хрестовини й великого циліндра, на якому жорстко встановлена остання, а тягова рамка виконана у вигляді двох напрямних, сполучної планки, тягової хрестовини й малого циліндра, на якому жорстко встановлена остання, при цьому в кожній хрестовині виконано по два напрямні отвори й по два отвори під кріплення напрямних, причому кожна хрестовина встановлена з можливістю переміщення поздовж напрямних обох рамок, крім того малий і великий циліндри хрестовин розміщені на одній осі з можливістю взаємного телескопічного переміщення один щодо іншого, при цьому на тяговій хрестовині й на вільному кінці великого циліндра виконані упори під розміщення між ними пружного елемента, крім того на великому циліндрі й на одній з напрямних тягової рамки встановлений коробчастий корпус із можливістю переміщення уздовж великого циліндра і напрямної, причому у великому циліндрі виконаний напрямний паз, а в малому циліндрі встановлений упор, який зв'язує малий циліндр через напрямний паз великого циліндра з коробчастим корпусом, при цьому на останньому встановлена система важелів, на яких встановлений записуючий пристрій, а на одній з напрямних несучої рамки встановлений пристрій фіксації результатів дослідження на паперовий носій із приводом, причому останній забезпечений датчиком його вмикання й вимикання.
2. Динамограф за п. 1, який відрізняється тим, що система важелів виконана у вигляді Г-подібного важеля, встановленого на коробчастому корпусі, і двох тяг, одна з яких змонтована на несучій хрестовині, а друга - на коробчастому корпусі.
3. Динамограф за п. 1, який відрізняється тим, що датчик вмикання і вимикання привода виконаний у вигляді кінцевого вимикача, закріпленого на несучій хрестовині з можливістю взаємодії зі сполучною планкою тягової рамки.
4. Динамограф за п. 1, який відрізняється тим, що механізм пристрою фіксації результатів досліджень на паперовий носій виконаний з можливістю регулювання швидкості обертання вала двигуна.
Текст
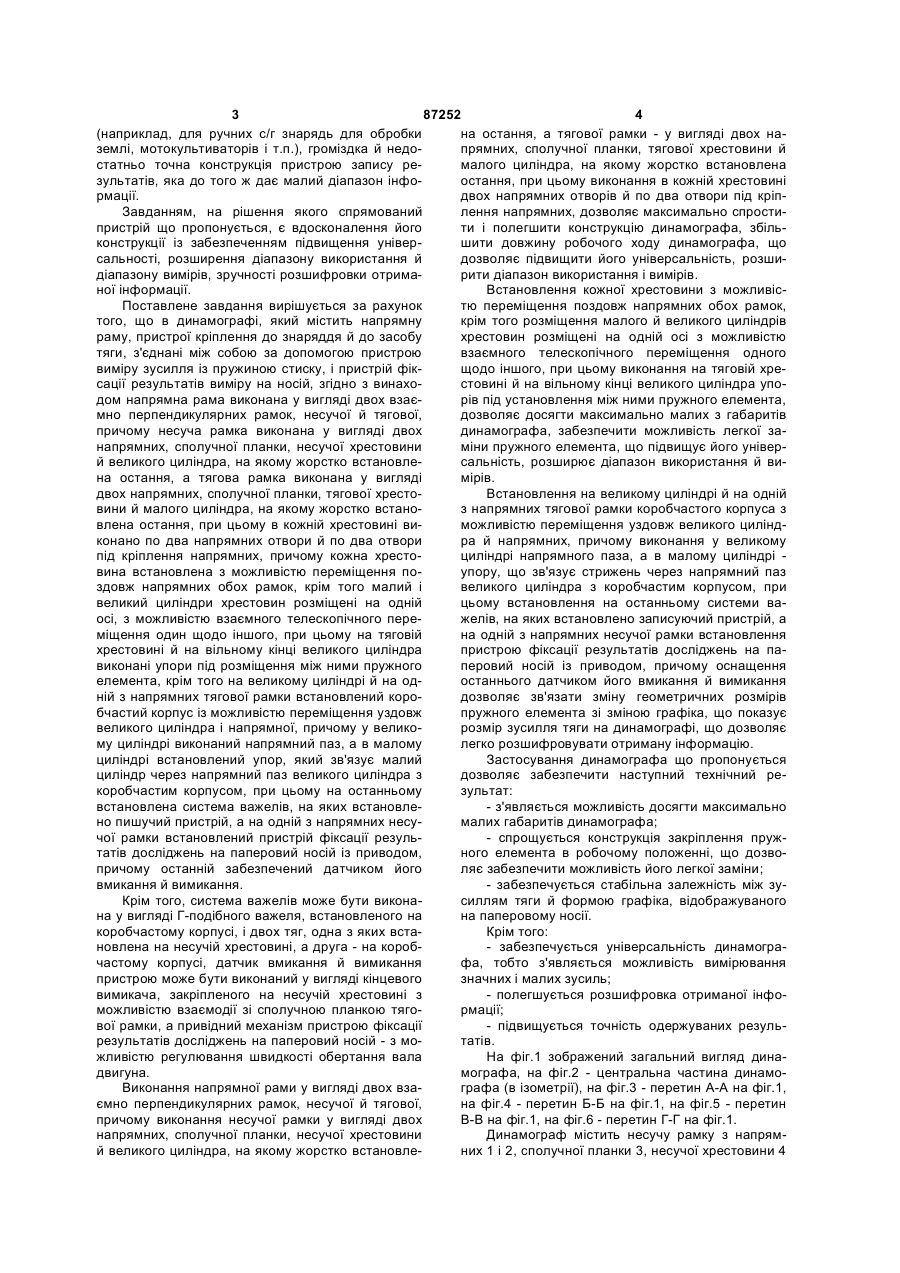
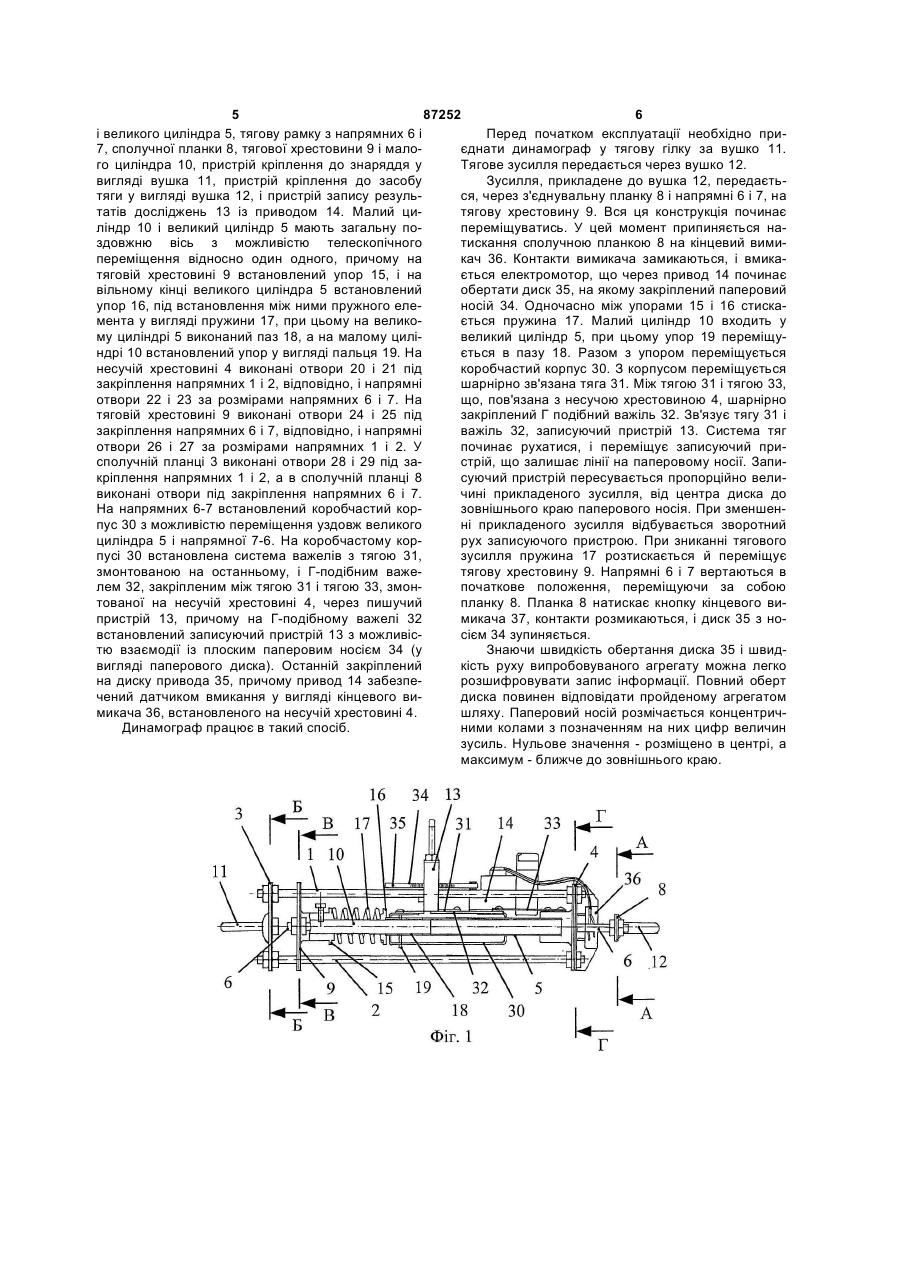
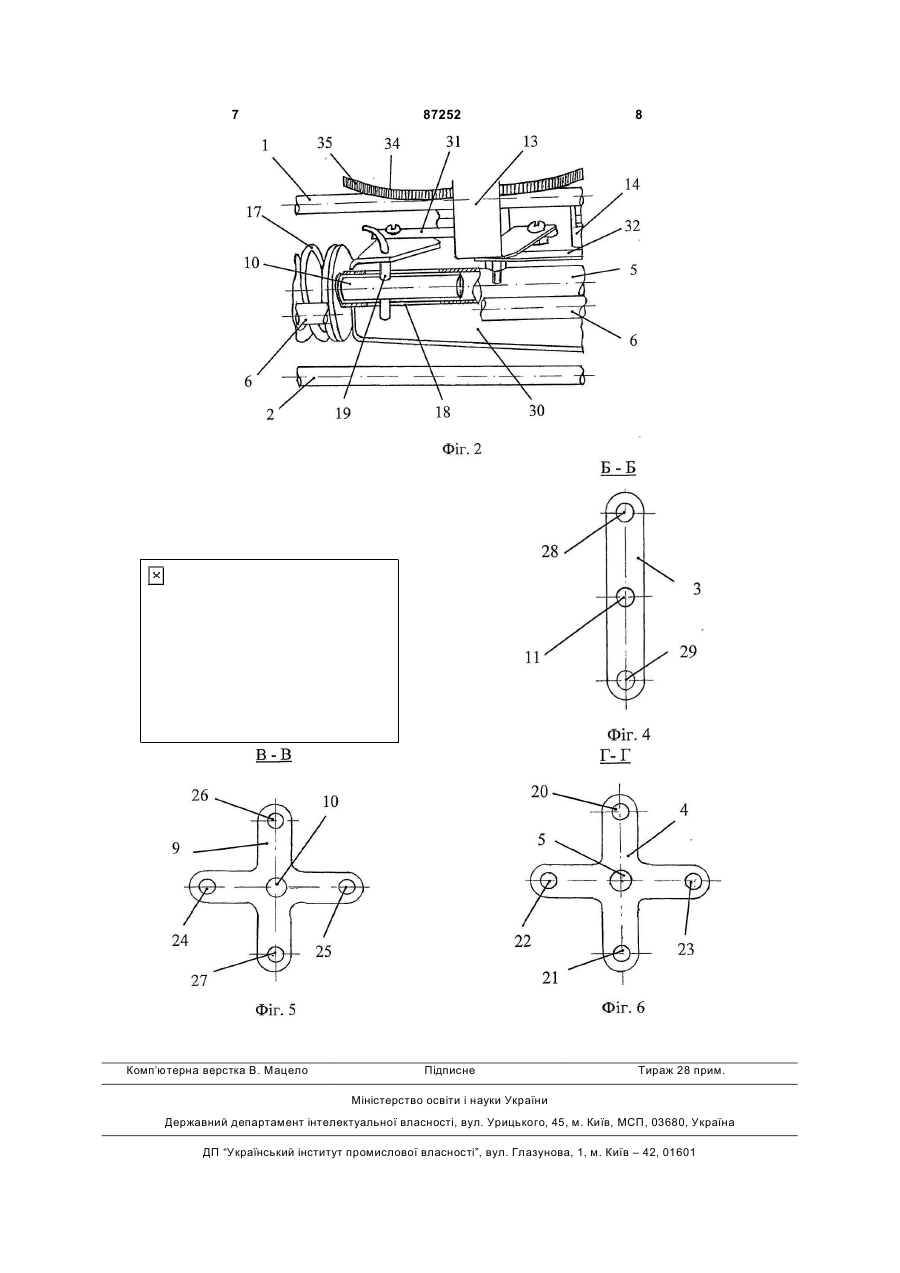
1. Динамограф, що має напрямну раму, пристрої кріплення до знаряддя й до засобу тяги, з'єднані між собою за допомогою пристрою виміру зусилля із пружиною стиску, і пристрій фіксації результатів вимірювання на носій, який відрізняється тим, що напрямна рама виконана у вигляді двох взаємно перпендикулярних рамок, несучої і тягової, причому несуча рамка виконана у вигляді двох напрямних, сполучної планки, несучої хрестовини й великого циліндра, на якому жорстко встановлена остання, а тягова рамка виконана у вигляді двох напрямних, сполучної планки, тягової хрестовини й малого циліндра, на якому жорстко встановлена остання, при цьому в кожній хрестовині виконано по два напрямні отвори й по два отвори під кріплення напрямних, причому кожна хрестовина встановлена з можливістю переміщення поздовж напрямних обох рамок, крім того малий і великий циліндри хрестовин розміщені на C2 2 (11) 1 3 87252 4 (наприклад, для ручних с/г знарядь для обробки на остання, а тягової рамки - у вигляді двох наземлі, мотокультиваторів і т.п.), громіздка й недопрямних, сполучної планки, тягової хрестовини й статньо точна конструкція пристрою запису ремалого циліндра, на якому жорстко встановлена зультатів, яка до того ж дає малий діапазон інфоостання, при цьому виконання в кожній хрестовині рмації. двох напрямних отворів й по два отвори під кріпЗавданням, на рішення якого спрямований лення напрямних, дозволяє максимально спростипристрій що пропонується, є вдосконалення його ти і полегшити конструкцію динамографа, збільконструкції із забезпеченням підвищення універшити довжину робочого ходу динамографа, що сальності, розширення діапазону використання й дозволяє підвищити його універсальність, розшидіапазону вимірів, зручності розшифровки отримарити діапазон використання і вимірів. ної інформації. Встановлення кожної хрестовини з можливісПоставлене завдання вирішується за рахунок тю переміщення поздовж напрямних обох рамок, того, що в динамографі, який містить напрямну крім того розміщення малого й великого циліндрів раму, пристрої кріплення до знаряддя й до засобу хрестовин розміщені на одній осі з можливістю тяги, з'єднані між собою за допомогою пристрою взаємного телескопічного переміщення одного виміру зусилля із пружиною стиску, і пристрій фікщодо іншого, при цьому виконання на тяговій хресації результатів виміру на носій, згідно з винахостовині й на вільному кінці великого циліндра уподом напрямна рама виконана у вигляді двох взаєрів під установлення між ними пружного елемента, мно перпендикулярних рамок, несучої й тягової, дозволяє досягти максимально малих з габаритів причому несуча рамка виконана у вигляді двох динамографа, забезпечити можливість легкої занапрямних, сполучної планки, несучої хрестовини міни пружного елемента, що підвищує його універй великого циліндра, на якому жорстко встановлесальність, розширює діапазон використання й вина остання, а тягова рамка виконана у вигляді мірів. двох напрямних, сполучної планки, тягової хрестоВстановлення на великому циліндрі й на одній вини й малого циліндра, на якому жорстко встаноз напрямних тягової рамки коробчастого корпуса з влена остання, при цьому в кожній хрестовині виможливістю переміщення уздовж великого циліндконано по два напрямних отвори й по два отвори ра й напрямних, причому виконання у великому під кріплення напрямних, причому кожна хрестоциліндрі напрямного паза, а в малому циліндрі вина встановлена з можливістю переміщення поупору, що зв'язує стрижень через напрямний паз здовж напрямних обох рамок, крім того малий і великого циліндра з коробчастим корпусом, при великий циліндри хрестовин розміщені на одній цьому встановлення на останньому системи ваосі, з можливістю взаємного телескопічного пережелів, на яких встановлено записуючий пристрій, а міщення один щодо іншого, при цьому на тяговій на одній з напрямних несучої рамки встановлення хрестовині й на вільному кінці великого циліндра пристрою фіксації результатів досліджень на павиконані упори під розміщення між ними пружного перовий носій із приводом, причому оснащення елемента, крім того на великому циліндрі й на одостаннього датчиком його вмикання й вимикання ній з напрямних тягової рамки встановлений кородозволяє зв'язати зміну геометричних розмірів бчастий корпус із можливістю переміщення уздовж пружного елемента зі зміною графіка, що показує великого циліндра і напрямної, причому у великорозмір зусилля тяги на динамографі, що дозволяє му циліндрі виконаний напрямний паз, а в малому легко розшифровувати отриману інформацію. циліндрі встановлений упор, який зв'язує малий Застосування динамографа що пропонується циліндр через напрямний паз великого циліндра з дозволяє забезпечити наступний технічний рекоробчастим корпусом, при цьому на останньому зультат: встановлена система важелів, на яких встановле- з'являється можливість досягти максимально но пишучий пристрій, а на одній з напрямних несумалих габаритів динамографа; чої рамки встановлений пристрій фіксації резуль- спрощується конструкція закріплення пружтатів досліджень на паперовий носій із приводом, ного елемента в робочому положенні, що дозвопричому останній забезпечений датчиком його ляє забезпечити можливість його легкої заміни; вмикання й вимикання. - забезпечується стабільна залежність між зуКрім того, система важелів може бути виконасиллям тяги й формою графіка, відображуваного на у вигляді Г-подібного важеля, встановленого на на паперовому носії. коробчастому корпусі, і двох тяг, одна з яких встаКрім того: новлена на несучій хрестовині, а друга - на короб- забезпечується універсальність динамограчастому корпусі, датчик вмикання й вимикання фа, тобто з'являється можливість вимірювання пристрою може бути виконаний у вигляді кінцевого значних і малих зусиль; вимикача, закріпленого на несучій хрестовині з - полегшується розшифровка отриманої інфоможливістю взаємодії зі сполучною планкою тягормації; вої рамки, а привідний механізм пристрою фіксації - підвищується точність одержуваних резульрезультатів досліджень на паперовий носій - з мотатів. жливістю регулювання швидкості обертання вала На фіг.1 зображений загальний вигляд динадвигуна. мографа, на фіг.2 - центральна частина динамоВиконання напрямної рами у вигляді двох взаграфа (в ізометрії), на фіг.3 - перетин А-А на фіг.1, ємно перпендикулярних рамок, несучої й тягової, на фіг.4 - перетин Б-Б на фіг.1, на фіг.5 - перетин причому виконання несучої рамки у вигляді двох В-В на фіг.1, на фіг.6 - перетин Г-Г на фіг.1. напрямних, сполучної планки, несучої хрестовини Динамограф містить несучу рамку з напрямй великого циліндра, на якому жорстко встановлених 1 і 2, сполучної планки 3, несучої хрестовини 4 5 87252 6 і великого циліндра 5, тягову рамку з напрямних 6 і Перед початком експлуатації необхідно при7, сполучної планки 8, тягової хрестовини 9 і малоєднати динамограф у тягову гілку за вушко 11. го циліндра 10, пристрій кріплення до знаряддя у Тягове зусилля передається через вушко 12. вигляді вушка 11, пристрій кріплення до засобу Зусилля, прикладене до вушка 12, передаєтьтяги у вигляді вушка 12, і пристрій запису резулься, через з'єднувальну планку 8 і напрямні 6 і 7, на татів досліджень 13 із приводом 14. Малий цитягову хрестовину 9. Вся ця конструкція починає ліндр 10 і великий циліндр 5 мають загальну попереміщуватись. У цей момент припиняється наздовжню вісь з можливістю телескопічного тискання сполучною планкою 8 на кінцевий вимипереміщення відносно один одного, причому на кач 36. Контакти вимикача замикаються, і вмикатяговій хрестовині 9 встановлений упор 15, і на ється електромотор, що через привод 14 починає вільному кінці великого циліндра 5 встановлений обертати диск 35, на якому закріплений паперовий упор 16, під встановлення між ними пружного еленосій 34. Одночасно між упорами 15 і 16 стискамента у вигляді пружини 17, при цьому на великоється пружина 17. Малий циліндр 10 входить у му циліндрі 5 виконаний паз 18, а на малому цилівеликий циліндр 5, при цьому упор 19 переміщундрі 10 встановлений упор у вигляді пальця 19. На ється в пазу 18. Разом з упором переміщується несучій хрестовині 4 виконані отвори 20 і 21 під коробчастий корпус 30. З корпусом переміщується закріплення напрямних 1 і 2, відповідно, і напрямні шарнірно зв'язана тяга 31. Між тягою 31 і тягою 33, отвори 22 і 23 за розмірами напрямних 6 і 7. На що, пов'язана з несучою хрестовиною 4, шарнірно тяговій хрестовині 9 виконані отвори 24 і 25 під закріплений Г подібний важіль 32. Зв'язує тягу 31 і закріплення напрямних 6 і 7, відповідно, і напрямні важіль 32, записуючий пристрій 13. Система тяг отвори 26 і 27 за розмірами напрямних 1 і 2. У починає рухатися, і переміщує записуючий присполучній планці 3 виконані отвори 28 і 29 під застрій, що залишає лінії на паперовому носії. Запикріплення напрямних 1 і 2, а в сполучній планці 8 суючий пристрій пересувається пропорційно веливиконані отвори під закріплення напрямних 6 і 7. чині прикладеного зусилля, від центра диска до На напрямних 6-7 встановлений коробчастий корзовнішнього краю паперового носія. При зменшенпус 30 з можливістю переміщення уздовж великого ні прикладеного зусилля відбувається зворотний циліндра 5 і напрямної 7-6. На коробчастому коррух записуючого пристрою. При зниканні тягового пусі 30 встановлена система важелів з тягою 31, зусилля пружина 17 розтискається й переміщує змонтованою на останньому, і Г-подібним важетягову хрестовину 9. Напрямні 6 і 7 вертаються в лем 32, закріпленим між тягою 31 і тягою 33, змонпочаткове положення, переміщуючи за собою тованої на несучій хрестовині 4, через пишучий планку 8. Планка 8 натискає кнопку кінцевого випристрій 13, причому на Г-подібному важелі 32 микача 37, контакти розмикаються, і диск 35 з новстановлений записуючий пристрій 13 з можливіссієм 34 зупиняється. тю взаємодії із плоским паперовим носієм 34 (у Знаючи швидкість обертання диска 35 і швидвигляді паперового диска). Останній закріплений кість руху випробовуваного агрегату можна легко на диску привода 35, причому привод 14 забезперозшифровувати запис інформації. Повний оберт чений датчиком вмикання у вигляді кінцевого видиска повинен відповідати пройденому агрегатом микача 36, встановленого на несучій хрестовині 4. шляху. Паперовий носій розмічається концентричДинамограф працює в такий спосіб. ними колами з позначенням на них цифр величин зусиль. Нульове значення - розміщено в центрі, а максимум - ближче до зовнішнього краю. 7 Комп’ютерна верстка В. Мацело 87252 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDynamograph
Автори англійськоюMertsedin Heorhii Rostyslavovych
Назва патенту російськоюДинамограф
Автори російськоюМерцедин Георгий Ростиславович
МПК / Мітки
МПК: G01L 1/00
Мітки: динамограф
Код посилання
<a href="https://ua.patents.su/4-87252-dinamograf.html" target="_blank" rel="follow" title="База патентів України">Динамограф</a>
Динамограф штангових глибинних насосів

Номер патенту: 14678
Опубліковано: 15.05.2006
Автори: Науменко Ігор Якович, Кизима Володимир Іванович
МПК: E21B 47/00
Мітки: динамограф, глибинних, штангових, насосів
Формула / Реферат:
Динамограф штангових глибинних насосів, що містить датчик навантаження штока, з'єднаний через підсилювач з входом фільтра нижніх частот, акселерометр та комп'ютер, який відрізняється тим, що він містить контролер динамографа, перший вхід якого з'єднано з виходом фільтра нижніх частот, а другий вхід - з виходом акселерометра, перший вихід контролера динамографа з'єднано з керуючим входом підсилювача, а перший та другий інформаційні виходи...
Пристрій для енергопостачання транспортного засобу

Номер патенту: 79544
Опубліковано: 25.06.2007
Автори: Панченко Віктор Іванович, Рибалко Анатолій Якович, Півняк Геннадій Григорович, Дибрін Сергій Володимирович
МПК: B60L 5/00
Мітки: енергопостачання, пристрій, транспортного, засобу
Формула / Реферат:
Пристрій для енергопостачання транспортного засобу, що містить струмопровідний кабель тягової мережі та встановлений на транспортному засобі і взаємодіючий з струмопровідним кабелем замкнений магнітопровід, на якому розміщена обмотка, що з'єднана з тяговим двигуном транспортного засобу, і барабан з струмопровідним кабелем, який відрізняється тим, що магнітопровід виконаний замкненим із двох коаксіальних циліндрів, сполучених з обох торців...
Обладнання для енергопостачання транспортного засобу
Номер патенту: 25814
Опубліковано: 27.08.2007
Автори: Дибрін Сергій Володимирович, Півняк Геннадій Григорович, Панченко Віктор Іванович, Рибалко Анатолій Якович
МПК: B60L 5/00
Мітки: обладнання, транспортного, засобу, енергопостачання
Формула / Реферат:
Обладнання для енергопостачання транспортного засобу, що містить струмопровідний кабель тягової мережі та встановлений на транспортному засобі і взаємодіючий з струмопровідним кабелем замкнений магнітопровід, на якому розміщена обмотка, що з'єднана з тяговим двигуном транспортного засобу, і барабан з струмопровідним кабелем, яке відрізняється тим, що магнітопровід виконано замкненим із двох коаксіальних циліндрів, сполучених з обох торців...
Магнітопровід корпуса тягової електричної машини

Номер патенту: 12543
Опубліковано: 15.02.2006
Автори: Гавріш Віктор Григорович, Гоцкало Георгій Григорович, Макарєєв Олександр Дмитрович, Грівін Сергій Анатолійович
Мітки: тягової, магнітопровід, електричної, машини, корпуса
Формула / Реферат:
1. Магнітопровід корпуса тягової електричної машини, виконаний у вигляді циліндра, із звальцьованого листа сталі, який відрізняється тим, що на поверхні цього циліндра напресований ще хоча б один додатковий циліндр із звальцьованого листа сталі.2. Магнітопровід корпуса за п. 1, який відрізняється тим, що між двома додатковими циліндрами на поверхні циліндра закріплений фланець.
Пристрій для контролю, добору проб або видобування вмісту в точному місці під плитою
Номер патенту: 66379
Опубліковано: 17.05.2004
Автори: Керло Даніель, Шіаві Марк, Гійо Жан-Люк, Жюллієнн Бруно
МПК: G01N 33/24, B66C 13/18, F16G 11/00, B66C 13/04, B66C 21/00, G01N 1/04
Мітки: пристрій, контролю, точному, вмісту, місці, плитою, проб, добору, видобування
Формула / Реферат:
1. Пристрій для контролю, добору проб або виймання вмісту бункера, розташованого під плитою з отвором за допомогою підвішеного на несучому тросі механізму, що опускається крізь отвір, який відрізняється тим, що містить принаймні три розміщені під плитою напрямні троси, що сходяться до напрямного засобу, з яким вони з'єднуються після проходження крізь просвердлені в плиті отвори, розміщені у вінці, і намотуються на лебідки, які приводяться в...
Попередній патент: Застосування водного екстракту із цист артемії як противірусного засобу з антиаденовірусною і антигерпетичною активностями
Наступний патент: Спосіб використання автоматизованої системи інтерактивного навчання і бойової підготовки військовослужбовців сухопутних військ
Випадковий патент: Трансформатор трифазний