Динамограф штангових глибинних насосів
Номер патенту: 14678
Опубліковано: 15.05.2006

Формула / Реферат
Динамограф штангових глибинних насосів, що містить датчик навантаження штока, з'єднаний через підсилювач з входом фільтра нижніх частот, акселерометр та комп'ютер, який відрізняється тим, що він містить контролер динамографа, перший вхід якого з'єднано з виходом фільтра нижніх частот, а другий вхід - з виходом акселерометра, перший вихід контролера динамографа з'єднано з керуючим входом підсилювача, а перший та другий інформаційні виходи контролера динамографа з'єднано відповідно з першим приймачем-передавачем та оперативним запам'ятовуючим пристроєм, при цьому інформаційний вихід комп'ютера через контролер приймача-передавача з'єднано з входом другого приймача-передавача, а виходи першого і другого приймачів-передавачів з'єднано відповідно з першою і другою радіоантенами.
Текст
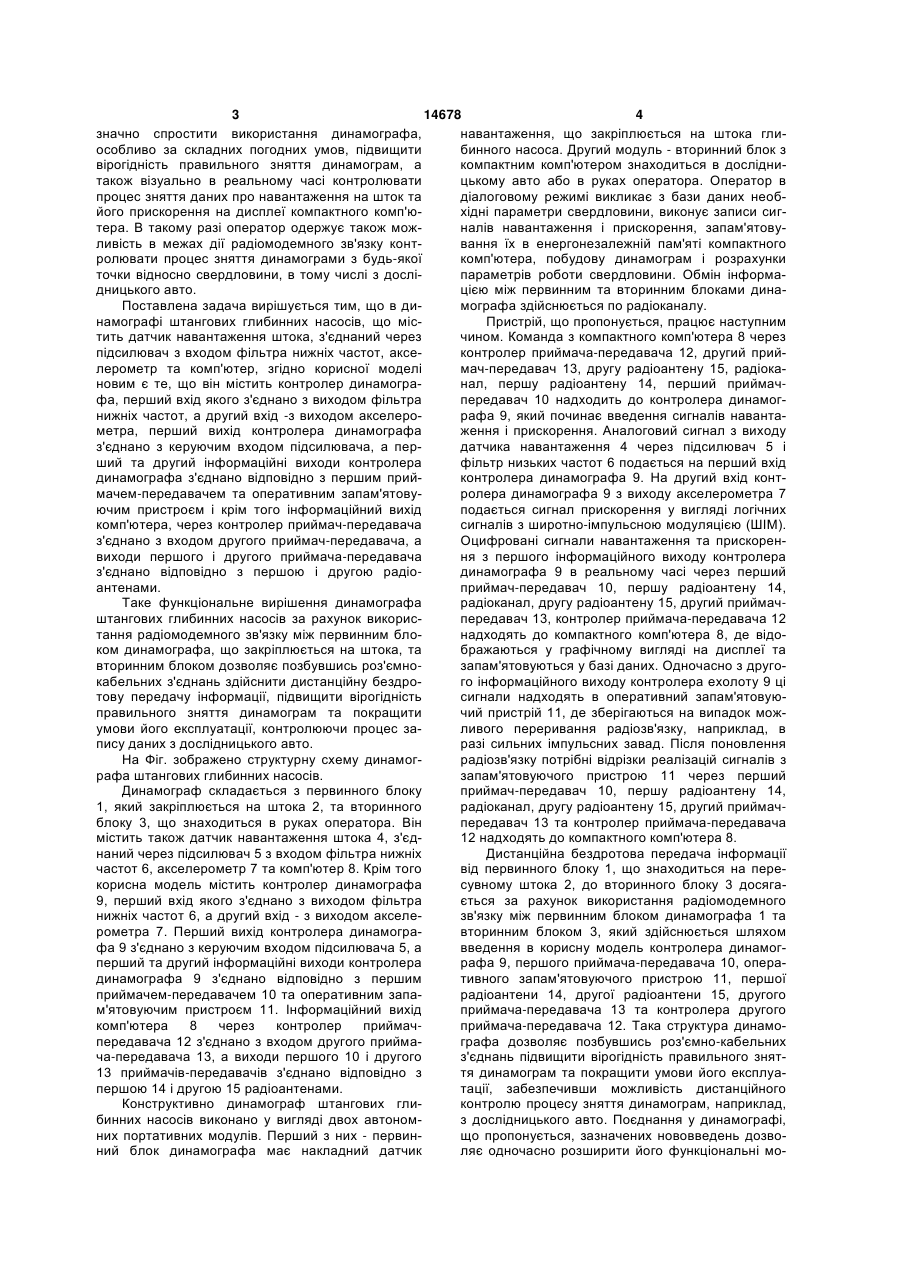
Динамограф штангових глибинних насосів, що містить датчик навантаження штока, з'єднаний через підсилювач з входом фільтра нижніх частот, акселерометр та комп'ютер, який відрізняється тим, що він містить контролер динамографа, пер 3 14678 4 значно спростити використання динамографа, навантаження, що закріплюється на штока глиособливо за складних погодних умов, підвищити бинного насоса. Другий модуль - вторинний блок з вірогідність правильного зняття динамограм, а компактним комп'ютером знаходиться в досліднитакож візуально в реальному часі контролювати цькому авто або в руках оператора. Оператор в процес зняття даних про навантаження на шток та діалоговому режимі викликає з бази даних необйого прискорення на дисплеї компактного комп'юхідні параметри свердловини, виконує записи сигтера. В такому разі оператор одержує також можналів навантаження і прискорення, запам'ятовуливість в межах дії радіомодемного зв'язку контвання їх в енергонезалежній пам'яті компактного ролювати процес зняття динамограми з будь-якої комп'ютера, побудову динамограм і розрахунки точки відносно свердловини, в тому числі з досліпараметрів роботи свердловини. Обмін інформадницького авто. цією між первинним та вторинним блоками динаПоставлена задача вирішується тим, що в димографа здійснюється по радіоканалу. намографі штангових глибинних насосів, що місПристрій, що пропонується, працює наступним тить датчик навантаження штока, з'єднаний через чином. Команда з компактного комп'ютера 8 через підсилювач з входом фільтра нижніх частот, аксеконтролер приймача-передавача 12, другий прийлерометр та комп'ютер, згідно корисної моделі мач-передавач 13, другу радіоантену 15, радіокановим є те, що він містить контролер динамогранал, першу радіоантену 14, перший приймачфа, перший вхід якого з'єднано з виходом фільтра передавач 10 надходить до контролера динамогнижніх частот, а другий вхід -з виходом акселерорафа 9, який починає введення сигналів навантаметра, перший вихід контролера динамографа ження і прискорення. Аналоговий сигнал з виходу з'єднано з керуючим входом підсилювача, а пердатчика навантаження 4 через підсилювач 5 і ший та другий інформаційні виходи контролера фільтр низьких частот 6 подається на перший вхід динамографа з'єднано відповідно з першим прийконтролера динамографа 9. На другий вхід контмачем-передавачем та оперативним запам'ятовуролера динамографа 9 з виходу акселерометра 7 ючим пристроєм і крім того інформаційний вихід подається сигнал прискорення у вигляді логічних комп'ютера, через контролер приймач-передавача сигналів з широтно-імпульсною модуляцією (ШІМ). з'єднано з входом другого приймач-передавача, а Оцифровані сигнали навантаження та прискоренвиходи першого і другого приймача-передавача ня з першого інформаційного виходу контролера з'єднано відповідно з першою і другою радіодинамографа 9 в реальному часі через перший антенами. приймач-передавач 10, першу радіоантену 14, Таке функціональне вирішення динамографа радіоканал, другу радіоантену 15, другий приймачштангових глибинних насосів за рахунок викориспередавач 13, контролер приймача-передавача 12 тання радіомодемного зв'язку між первинним блонадходять до компактного комп'ютера 8, де відоком динамографа, що закріплюється на штока, та бражаються у графічному вигляді на дисплеї та вторинним блоком дозволяє позбувшись роз'ємнозапам'ятовуються у базі даних. Одночасно з другокабельних з'єднань здійснити дистанційну бездрого інформаційного виходу контролера ехолоту 9 ці тову передачу інформації, підвищити вірогідність сигнали надходять в оперативний запам'ятовуюправильного зняття динамограм та покращити чий пристрій 11, де зберігаються на випадок можумови його експлуатації, контролюючи процес заливого переривання радіозв'язку, наприклад, в пису даних з дослідницького авто. разі сильних імпульсних завад. Після поновлення На Фіг. зображено структурну схему динамоградіозв'язку потрібні відрізки реалізацій сигналів з рафа штангових глибинних насосів. запам'ятовуючого пристрою 11 через перший Динамограф складається з первинного блоку приймач-передавач 10, першу радіоантену 14, 1, який закріплюється на штока 2, та вторинного радіоканал, другу радіоантену 15, другий приймачблоку 3, що знаходиться в руках оператора. Він передавач 13 та контролер приймача-передавача містить також датчик навантаження штока 4, з'єд12 надходять до компактного комп'ютера 8. наний через підсилювач 5 з входом фільтра нижніх Дистанційна бездротова передача інформації частот 6, акселерометр 7 та комп'ютер 8. Крім того від первинного блоку 1, що знаходиться на перекорисна модель містить контролер динамографа сувному штока 2, до вторинного блоку 3 досяга9, перший вхід якого з'єднано з виходом фільтра ється за рахунок використання радіомодемного нижніх частот 6, а другий вхід - з виходом акселезв'язку між первинним блоком динамографа 1 та рометра 7. Перший вихід контролера динамогравторинним блоком 3, який здійснюється шляхом фа 9 з'єднано з керуючим входом підсилювача 5, а введення в корисну модель контролера динамогперший та другий інформаційні виходи контролера рафа 9, першого приймача-передавача 10, операдинамографа 9 з'єднано відповідно з першим тивного запам'ятовуючого пристрою 11, першої приймачем-передавачем 10 та оперативним запарадіоантени 14, другої радіоантени 15, другого м'ятовуючим пристроєм 11. Інформаційний вихід приймача-передавача 13 та контролера другого комп'ютера 8 через контролер приймачприймача-передавача 12. Така структура динамопередавача 12 з'єднано з входом другого приймаграфа дозволяє позбувшись роз'ємно-кабельних ча-передавача 13, а виходи першого 10 і другого з'єднань підвищити вірогідність правильного знят13 приймачів-передавачів з'єднано відповідно з тя динамограм та покращити умови його експлуапершою 14 і другою 15 радіоантенами. тації, забезпечивши можливість дистанційного Конструктивно динамограф штангових гликонтролю процесу зняття динамограм, наприклад, бинних насосів виконано у вигляді двох автономз дослідницького авто. Поєднання у динамографі, них портативних модулів. Перший з них - первинщо пропонується, зазначених нововведень дозвоний блок динамографа має накладний датчик ляє одночасно розширити його функціональні мо 5 14678 6 жливості і значно підвищити ефективність викорино [3] з використанням тензометричних чутливих стання, відкриваючи для дослідника низку нових елементів. можливостей, а саме роботу з дослідницького авто Таким чином використання пропонованої струв холодну або дощову погоду, можливість програктури та технології бездротового зв'язку дозволяє мування процесу вимірювання на заданий термін створити для контролю та діагностики роботи та ін. Крім того відсутність роз'ємно-кабельних штангових глибинних насосів динамограф нового з'єднань, які зазвичай потрібно кожного разу розпокоління, що характеризується відсутністю вад, гортати та згортати, суттєво підвищує оперативпритаманних відомим приладам з роз'ємноність зняття динамограм. кабельними з'єднаннями. Це внесення додаткових Використання сучасної елементної бази з мікелектромагнітних завад, можливі порушення конроспоживанням дозволяє створити портативний тактів, незручності у експлуатації особливо в додинамограф, який можна застосовувати в нафтощову погоду та взимку. Пропонований прилад довидобувній галузі для оперативного контролю та зволяє оперативно вести зняття динамограм за діагностики роботи штангових глибинних насосів. дистанційною бездротовою технологією, наприВ якості контролера динамографа 9 та контролера клад, з дослідницького авто навіть у складних поприймача-передавача 12 використовується елегодних умовах. Дослідний зразок приладу було ментна база фірми Texas Instruments, а саме, мікуспішно випробувано в роботі на нафтових свердроконтролер MSP430, в якості першого 10 і друголовинах ВАТ "Укрнафта". го 13 приймачів-передавачів використовується Джерела інформації: приймач-передавач RFB433 норвезької фірми 1. A.c. СССР №1330346, МКИ F04В47/02, Bluechip Communication, в якості компактного ком15.08.1987. п'ютера 8 - кишеньковий комп'ютер iPAQ фірми 2. Патент России №93010535, МКИ F04B47/00, Compaq. Акселерометр 7 може бути виконано на 20.10.1995. інтегральній мікросхемі ADXL202E фірми Analog 3. United States Patent №5464058, E21В047/00, Devices. Датчик навантаження 4 виконано за 07.11.1995. принципом радіальної деформації штока аналогіч Комп’ютерна верстка Н. Лисенко Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDynamograph of beam well pumps
Автори англійськоюNaumenko Ihor Yakovych, Kyzyma Volodymyr Ivanovych
Назва патенту російськоюДинамограф штанговых глубинных насосов
Автори російськоюНауменко Игорь Яковлевич, Кизима Владимир Иванович
МПК / Мітки
МПК: E21B 47/00
Мітки: динамограф, глибинних, насосів, штангових
Код посилання
<a href="https://ua.patents.su/3-14678-dinamograf-shtangovikh-glibinnikh-nasosiv.html" target="_blank" rel="follow" title="База патентів України">Динамограф штангових глибинних насосів</a>
Пристрій для опресовки штангових насосів

Номер патенту: 20445
Опубліковано: 15.07.1997
Автори: Попівчак Сергій Іванович, Рилов Борис Михайлович, Кірпічонок Анатолій Романович
МПК: F04B 47/02
Мітки: пристрій, опресовки, штангових, насосів
Формула / Реферат:
Пристрій для опресовки штангових насосів, який включає корпус, встановлене в ньому робоче конусне опорне кільце і стяжну гайку, який відрізняється тим, що містить додаткове опрссовочне конусне опорне кільце, яке встановлене з можливістю розміщення між ним і робочим конусним опорним кільцем посадочного конусного кільця штангового насоса, який гідравлічно сполучає нагнітальну опресовочну лінію з площиною контакту робочого опорного конусного...
Пристрій для спуску і підйому штангових насосів без глушіння свердловин
Номер патенту: 29181
Опубліковано: 16.10.2000
Автори: Копичко Володимир Степанович, Рилов Борис Михайлович, Вороняк Ярослав Володимирович, Цвик Богдан Миколайович, Говорун Олександр Яковлевич, Кононюк Борис Андронович
МПК: E21B 43/00
Мітки: підйому, спуску, свердловин, пристрій, штангових, глушіння, насосів
Формула / Реферат:
Пристрій для спуску і підйому штангових насосів без глушіння свердловин, який містить укріплений на колоні підйомних труб корпус з посадочним елементом і радіальним приймальним каналом, розміщений в корпусі підпружинений запірний елемент з можливістю зворотньо-поступального переміщення в корпусі і контактування з штанговим насосом, фіксатор запірного елемента у його закритому положенні, який відрізняється тим, що запірний і посадочний...
Спосіб виготовлення труб для циліндрів свердловинних штангових насосів
Номер патенту: 30135
Опубліковано: 15.11.2000
Автори: Блощинський Григорій Павлович, Царьков Олексій Костянтинович, Туренков Микола Мусійович, Сергєєв Віктор Володимирович, Баглай Андрій Олександрович, Савченко Олег Миколайович, Тихонюк Анатолій Никифорович, Качур Анатолій Іванович, Трусков Юрій Миколайович, Сизоненко Григорій Олександрович, Правдін Юрій Михайлович, Кореняк Юрій Костянтинович, Калабухов Володимир Петрович, Миловський Вячеслав Олексійович, Касінов Віталій Іванович, Хаустов Георгій Йосипович
МПК: B21C 1/16, B21C 23/02
Мітки: спосіб, штангових, свердловинних, насосів, циліндрів, труб, виготовлення
Формула / Реферат:
Спосіб виготовлення труб для циліндрів свердловинних штангових насосів, що включає одержання трубчатої заготовки, її багатопрохідне волочіння, термообробку і правку, який відрізняється тим, що трубчату заготовку одержують гарячим пресуванням, сумарна деформація при багатопрохідному волочінні складає по діаметру 15-20%,а по товщині стінки – 10-15%,після пресування та кожного з проходів волочіння здійснюють роззміцнювальну термообробку у...
Апарат для стереотаксичних операцій на глибинних структурах головного мозку
Номер патенту: 34855
Опубліковано: 15.03.2001
Автори: Семенець Валерій Васильович, Сіпітий Віталій Іванович, Масловський Сергій Юрьович, Кутовий Ігор Олександрович, П'ятикоп Володимир Олександрович, Аврунін Олег Григорович
МПК: A61B 19/00
Мітки: операцій, стереотаксичних, структурах, мозку, апарат, головного, глибинних
Формула / Реферат:
Апарат для стереотаксичних операцій на глибинних структурах головного мозку, який містить в собі стереотаксичний маніпулятор, що з'єднай з хірургічним інструментом, систему навігації, з'єднану з першим входом ЕОМ, другий вхід якої зв'язан з системою контроля за станом пацієнта, що відрізняється тим, що стереотаксичний маніпулятор містить інтерфейс, перший вихід якого через буферний регістр з'єднаний з пристроями управління електричними...
Стенд для випробування приводів свердловинних штангових насосних установок
Номер патенту: 68786
Опубліковано: 16.08.2004
Автори: Малько Богдан Дмитрович, Харун Віктор Романович
МПК: F04B 51/00
Мітки: штангових, свердловинних, насосних, установок, приводів, стенд, випробування
Формула / Реферат:
Стенд для випробовування приводів свердловинних штангових насосних установок, який містить основний навантажувальний пристрій, з'єднаний з підвіскою та гнучкою ланкою, що включає в себе вантаж змінної ваги та додатковий навантажувальний пристрій у вигляді гідравлічного циліндра односторонньої дії, в корпусі якого розміщений поршень, причому порожнини корпуса гідравлічного циліндра і ємність робочої рідини зв'язані між собою через...