Рейкова транспортна система
Формула / Реферат
1. Рейкова транспортна система для людей та матеріалу в підземних гірничих розробках і в тунелебудуванні, яка складається з рейкової відкотної мережі та транспортних засобів, що направляються в цій відкотній мережі, причому відповідний транспортний засіб як на своєму передньому в напрямку руху кінці, так і на протилежному кінці забезпечений датчиками (1-6) для детектування оптичної, акустичної інформації, інформації про температуру та інформації про прискорення, причому один з датчиків являє собою лазерний скануючий пристрій і датчики зв'язані з розташованим на транспортному засобі керуючим обчислювальним пристроєм, який є частиною контролюючої та керуючої транспортною системою телематичної системи, причому датчики взаємодіють з активними та пасивними сигналізаторами у відкотній мережі, в якій встановлені вільно позиціоновані кінцеві та зупинні сигналізатори.
2. Рейкова транспортна система за п. 1, яка відрізняється тим, що керуючий обчислювальний пристрій зв'язаний з телематичною системою за допомогою LAN-технології, причому відкотна мережа розділена на декілька активних ділянок.
3. Рейкова транспортна система за п. 1, яка відрізняється тим, що для передачі даних на всьому шляху проходження передбачений випромінюючий антенний фідер.
4. Рейкова транспортна система за будь-яким з пп. 1-3, яка відрізняється тим, що транспортний засіб забезпечений оптичними та акустичними сигналізаторами.
5. Рейкова транспортна система за будь-яким з пп. 1-4, яка відрізняється тим, що транспортний засіб є підвісною монорейковою дорогою.
6. Рейкова транспортна система за будь-яким з пп. 1-4, яка відрізняється тим, що транспортний засіб є надґрунтовою дорогою.
7. Рейкова транспортна система за будь-яким з пп. 1-6, яка відрізняється тим, що як датчики використовуються ультразвукові датчики, інфрачервоні датчики, датчики прискорення, датчики, що дають зображення, і мікрофони.
8. Рейкова транспортна система за будь-яким з пп. 1-7, яка відрізняється тим, що транспортний засіб обладнаний щонайменше однією вбудованою камерою, яка виконана з можливістю дистанційного керування за допомогою диспетчерського пункту телематичної системи.
Текст
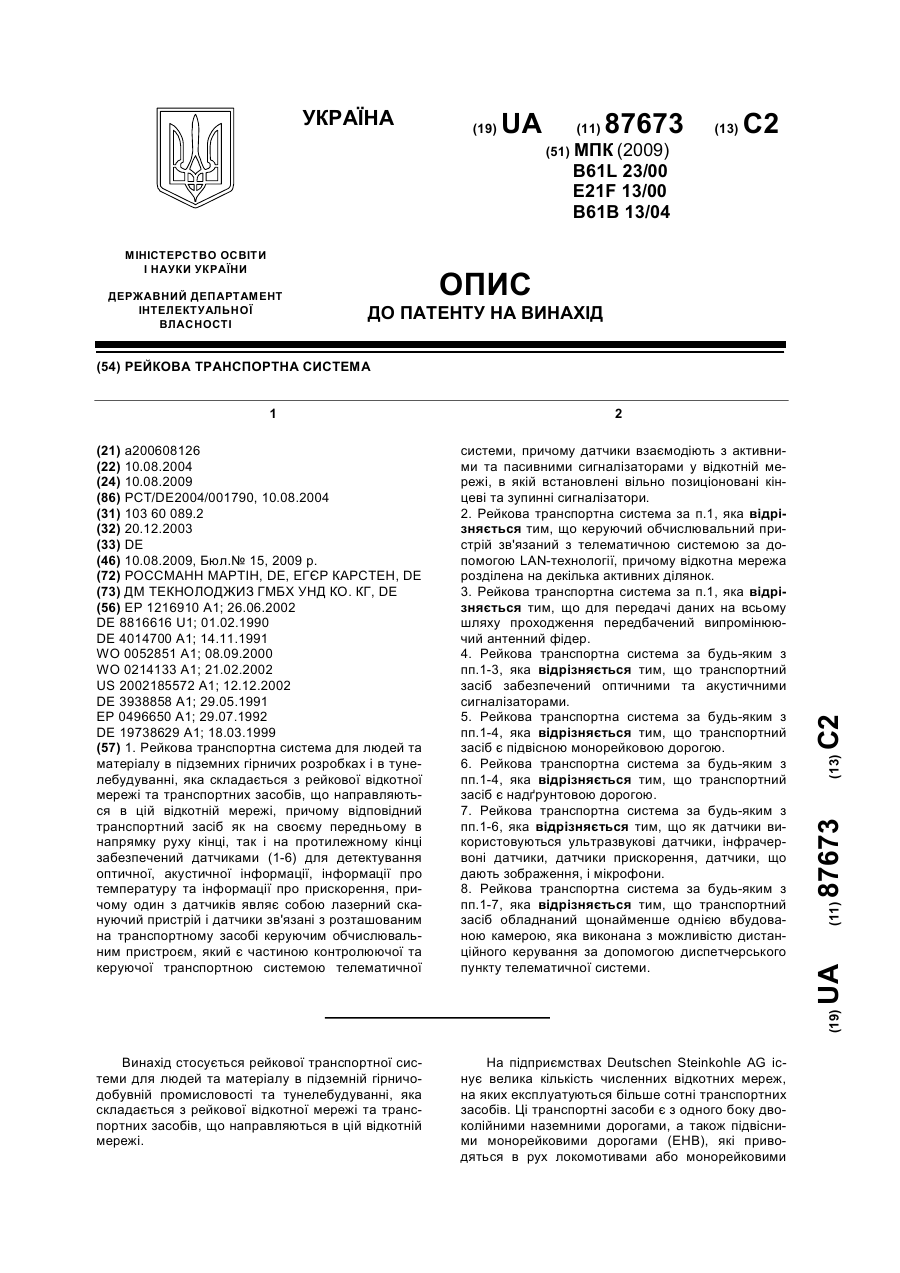
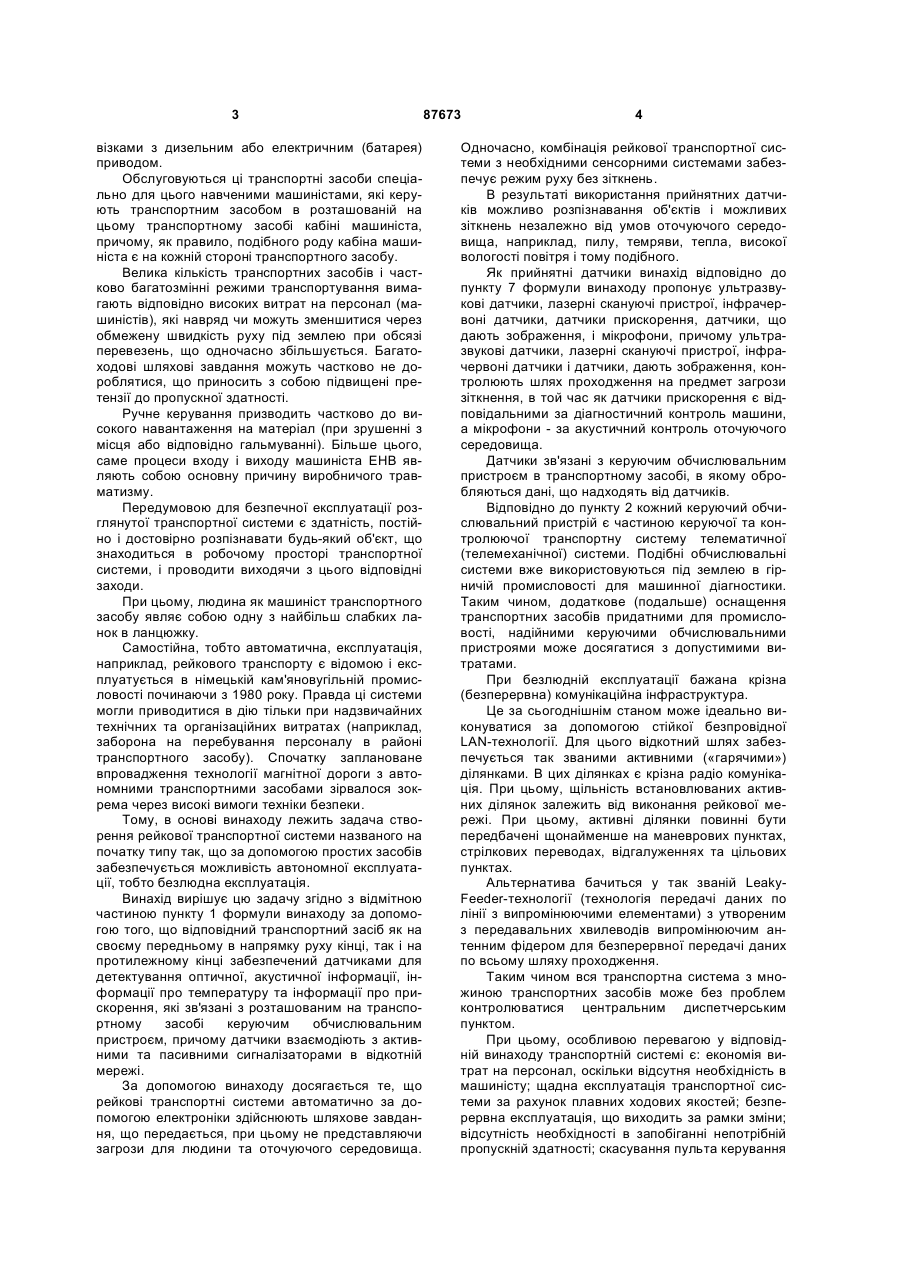
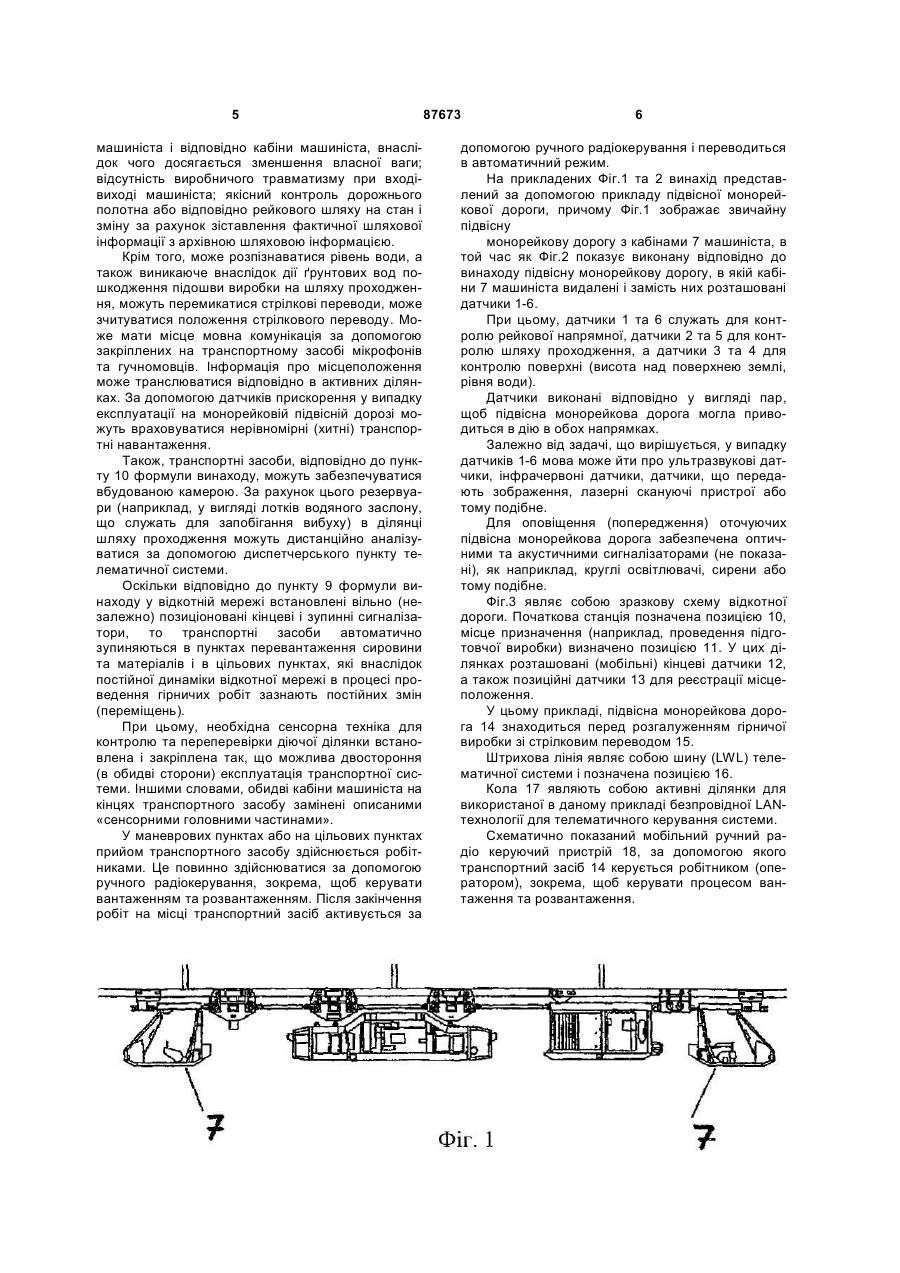
1. Рейкова транспортна система для людей та матеріалу в підземних гірничих розробках і в тунелебудуванні, яка складається з рейкової відкотної мережі та транспортних засобів, що направляються в цій відкотній мережі, причому відповідний транспортний засіб як на своєму передньому в напрямку руху кінці, так і на протилежному кінці забезпечений датчиками (1-6) для детектування оптичної, акустичної інформації, інформації про температуру та інформації про прискорення, причому один з датчиків являє собою лазерний скануючий пристрій і датчики зв'язані з розташованим на транспортному засобі керуючим обчислювальним пристроєм, який є частиною контролюючої та керуючої транспортною системою телематичної C2 2 UA 1 3 візками з дизельним або електричним (батарея) приводом. Обслуговуються ці транспортні засоби спеціально для цього навченими машиністами, які керують транспортним засобом в розташованій на цьому транспортному засобі кабіні машиніста, причому, як правило, подібного роду кабіна машиніста є на кожній стороні транспортного засобу. Велика кількість транспортних засобів і частково багатозмінні режими транспортування вимагають відповідно високих витрат на персонал (машиністів), які навряд чи можуть зменшитися через обмежену швидкість руху під землею при обсязі перевезень, що одночасно збільшується. Багатоходові шляхові завдання можуть частково не дороблятися, що приносить з собою підвищені претензії до пропускної здатності. Ручне керування призводить частково до високого навантаження на матеріал (при зрушенні з місця або відповідно гальмуванні). Більше цього, саме процеси входу і виходу машиніста ЕНВ являють собою основну причину виробничого травматизму. Передумовою для безпечної експлуатації розглянутої транспортної системи є здатність, постійно і достовірно розпізнавати будь-який об'єкт, що знаходиться в робочому просторі транспортної системи, і проводити виходячи з цього відповідні заходи. При цьому, людина як машиніст транспортного засобу являє собою одну з найбільш слабких ланок в ланцюжку. Самостійна, тобто автоматична, експлуатація, наприклад, рейкового транспорту є відомою і експлуатується в німецькій кам'яновугільній промисловості починаючи з 1980 року. Правда ці системи могли приводитися в дію тільки при надзвичайних технічних та організаційних витратах (наприклад, заборона на перебування персоналу в районі транспортного засобу). Спочатку заплановане впровадження технології магнітної дороги з автономними транспортними засобами зірвалося зокрема через високі вимоги техніки безпеки. Тому, в основі винаходу лежить задача створення рейкової транспортної системи названого на початку типу так, що за допомогою простих засобів забезпечується можливість автономної експлуатації, тобто безлюдна експлуатація. Винахід вирішує цю задачу згідно з відмітною частиною пункту 1 формули винаходу за допомогою того, що відповідний транспортний засіб як на своєму передньому в напрямку руху кінці, так і на протилежному кінці забезпечений датчиками для детектування оптичної, акустичної інформації, інформації про температуру та інформації про прискорення, які зв'язані з розташованим на транспортному засобі керуючим обчислювальним пристроєм, причому датчики взаємодіють з активними та пасивними сигналізаторами в відкотній мережі. За допомогою винаходу досягається те, що рейкові транспортні системи автоматично за допомогою електроніки здійснюють шляхове завдання, що передається, при цьому не представляючи загрози для людини та оточуючого середовища. 87673 4 Одночасно, комбінація рейкової транспортної системи з необхідними сенсорними системами забезпечує режим руху без зіткнень. В результаті використання прийнятних датчиків можливо розпізнавання об'єктів і можливих зіткнень незалежно від умов оточуючого середовища, наприклад, пилу, темряви, тепла, високої вологості повітря і тому подібного. Як прийнятні датчики винахід відповідно до пункту 7 формули винаходу пропонує ультразвукові датчики, лазерні скануючі пристрої, інфрачервоні датчики, датчики прискорення, датчики, що дають зображення, і мікрофони, причому ультразвукові датчики, лазерні скануючі пристрої, інфрачервоні датчики і датчики, дають зображення, контролюють шлях проходження на предмет загрози зіткнення, в той час як датчики прискорення є відповідальними за діагностичний контроль машини, а мікрофони - за акустичний контроль оточуючого середовища. Датчики зв'язані з керуючим обчислювальним пристроєм в транспортному засобі, в якому обробляються дані, що надходять від датчиків. Відповідно до пункту 2 кожний керуючий обчислювальний пристрій є частиною керуючої та контролюючої транспортну систему телематичної (телемеханічної) системи. Подібні обчислювальні системи вже використовуються під землею в гірничій промисловості для машинної діагностики. Таким чином, додаткове (подальше) оснащення транспортних засобів придатними для промисловості, надійними керуючими обчислювальними пристроями може досягатися з допустимими витратами. При безлюдній експлуатації бажана крізна (безперервна) комунікаційна інфраструктура. Це за сьогоднішнім станом може ідеально виконуватися за допомогою стійкої безпровідної LAN-технології. Для цього відкотний шлях забезпечується так званими активними («гарячими») ділянками. В цих ділянках є крізна радіо комунікація. При цьому, щільність встановлюваних активних ділянок залежить від виконання рейкової мережі. При цьому, активні ділянки повинні бути передбачені щонайменше на маневрових пунктах, стрілкових переводах, відгалуженнях та цільових пунктах. Альтернатива бачиться у так званій LeakyFeeder-технології (технологія передачі даних по лінії з випромінюючими елементами) з утвореним з передавальних хвилеводів випромінюючим антенним фідером для безперервної передачі даних по всьому шляху проходження. Таким чином вся транспортна система з множиною транспортних засобів може без проблем контролюватися центральним диспетчерським пунктом. При цьому, особливою перевагою у відповідній винаходу транспортній системі є: економія витрат на персонал, оскільки відсутня необхідність в машиністу; щадна експлуатація транспортної системи за рахунок плавних ходових якостей; безперервна експлуатація, що виходить за рамки зміни; відсутність необхідності в запобіганні непотрібній пропускній здатності; скасування пульта керування 5 машиніста і відповідно кабіни машиніста, внаслідок чого досягається зменшення власної ваги; відсутність виробничого травматизму при входівиході машиніста; якісний контроль дорожнього полотна або відповідно рейкового шляху на стан і зміну за рахунок зіставлення фактичної шляхової інформації з архівною шляховою інформацією. Крім того, може розпізнаватися рівень води, а також виникаюче внаслідок дії ґрунтових вод пошкодження підошви виробки на шляху проходження, можуть перемикатися стрілкові переводи, може зчитуватися положення стрілкового переводу. Може мати місце мовна комунікація за допомогою закріплених на транспортному засобі мікрофонів та гучномовців. Інформація про місцеположення може транслюватися відповідно в активних ділянках. За допомогою датчиків прискорення у випадку експлуатації на монорейковій підвісній дорозі можуть враховуватися нерівномірні (хитні) транспортні навантаження. Також, транспортні засоби, відповідно до пункту 10 формули винаходу, можуть забезпечуватися вбудованою камерою. За рахунок цього резервуари (наприклад, у вигляді лотків водяного заслону, що служать для запобігання вибуху) в ділянці шляху проходження можуть дистанційно аналізуватися за допомогою диспетчерського пункту телематичної системи. Оскільки відповідно до пункту 9 формули винаходу у відкотній мережі встановлені вільно (незалежно) позиціоновані кінцеві і зупинні сигналізатори, то транспортні засоби автоматично зупиняються в пунктах перевантаження сировини та матеріалів і в цільових пунктах, які внаслідок постійної динаміки відкотної мережі в процесі проведення гірничих робіт зазнають постійних змін (переміщень). При цьому, необхідна сенсорна техніка для контролю та переперевірки діючої ділянки встановлена і закріплена так, що можлива двостороння (в обидві сторони) експлуатація транспортної системи. Іншими словами, обидві кабіни машиніста на кінцях транспортного засобу замінені описаними «сенсорними головними частинами». У маневрових пунктах або на цільових пунктах прийом транспортного засобу здійснюється робітниками. Це повинно здійснюватися за допомогою ручного радіокерування, зокрема, щоб керувати вантаженням та розвантаженням. Після закінчення робіт на місці транспортний засіб активується за 87673 6 допомогою ручного радіокерування і переводиться в автоматичний режим. На прикладених Фіг.1 та 2 винахід представлений за допомогою прикладу підвісної монорейкової дороги, причому Фіг.1 зображає звичайну підвісну монорейкову дорогу з кабінами 7 машиніста, в той час як Фіг.2 показує виконану відповідно до винаходу підвісну монорейкову дорогу, в якій кабіни 7 машиніста видалені і замість них розташовані датчики 1-6. При цьому, датчики 1 та 6 служать для контролю рейкової напрямної, датчики 2 та 5 для контролю шляху проходження, а датчики 3 та 4 для контролю поверхні (висота над поверхнею землі, рівня води). Датчики виконані відповідно у вигляді пар, щоб підвісна монорейкова дорога могла приводиться в дію в обох напрямках. Залежно від задачі, що вирішується, у випадку датчиків 1-6 мова може йти про ультразвукові датчики, інфрачервоні датчики, датчики, що передають зображення, лазерні скануючі пристрої або тому подібне. Для оповіщення (попередження) оточуючих підвісна монорейкова дорога забезпечена оптичними та акустичними сигналізаторами (не показані), як наприклад, круглі освітлювачі, сирени або тому подібне. Фіг.3 являє собою зразкову схему відкотної дороги. Початкова станція позначена позицією 10, місце призначення (наприклад, проведення підготовчої виробки) визначено позицією 11. У цих ділянках розташовані (мобільні) кінцеві датчики 12, а також позиційні датчики 13 для реєстрації місцеположення. У цьому прикладі, підвісна монорейкова дорога 14 знаходиться перед розгалуженням гірничої виробки зі стрілковим переводом 15. Штрихова лінія являє собою шину (LWL) телематичної системи і позначена позицією 16. Кола 17 являють собою активні ділянки для використаної в даному прикладі безпровідної LANтехнології для телематичного керування системи. Схематично показаний мобільний ручний радіо керуючий пристрій 18, за допомогою якого транспортний засіб 14 керується робітником (оператором), зокрема, щоб керувати процесом вантаження та розвантаження. 7 Комп’ютерна верстка Н. Лиcенко 87673 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюRail-guided transport system
Автори англійськоюRossmann Martin, Jaeger Karsten
Назва патенту російськоюРельсовая транспортная система
Автори російськоюРоссманн Мартин, Егер Карстен
МПК / Мітки
МПК: E21F 13/00, B61L 23/00, B61B 13/04
Мітки: транспортна, рейкова, система
Код посилання
<a href="https://ua.patents.su/4-87673-rejjkova-transportna-sistema.html" target="_blank" rel="follow" title="База патентів України">Рейкова транспортна система</a>
Транспортна рейкова система

Номер патенту: 3294
Опубліковано: 15.11.2004
Автори: Гнатюк В'ячеслав Томасович, Баєв Микола Федорович
МПК: B61J 3/00
Мітки: система, транспортна, рейкова
Формула / Реферат:
Транспортна рейкова система, яка містить рейкову колію з рейковим візком, оснащеним двома блоками, стаціонарно встановлений привід, зв'язаний із блоками рейкового візка через обвідні блоки тяговим канатом, яка відрізняється тим, що тяговий канат виконаний розімкнутим, а транспортна рейкова система додатково містить кінцеві зачепи, один із яких містить натяжну станцію, а інший - демпферний пристрій, розташовані по кінцях рейкового шляху,...
Рейкова шахтна транспортна система вижленкова
Номер патенту: 51704
Опубліковано: 16.12.2002
Автор: Вижленков Олександр Гур'янович
МПК: E21F 13/04, E21F 17/08, B61B 13/12
Мітки: шахтна, система, транспортна, рейкова, вижленкова
Формула / Реферат:
Рейкова шахтна транспортна система, що містить мережу рейок, шахтні локомотиви і потяги, яка відрізняється тим, що має траншейно-секційну гідротрубну мережу з насосним агрегатом високого тиску і кількома подвійними секційними трубними відгалуженнями, секційні автоматичні гідроколонки з додатковими шатунно-крейцкопфними механізмами, послідовно і зустрічно розміщеними внизу траншеї рейкового шляху, навісні ролико-маятникові датчики і виконавчі...
Транспортна система
Номер патенту: 29697
Опубліковано: 15.11.2000
Автори: Кожевніков Максим Валентинович, Кожевніков Валентин Павлович
МПК: B60F 1/00
Мітки: система, транспортна
Формула / Реферат:
1. Транспортна система, що складається з колії та поїздів, зібраних з локомотивів і вагонів, а також засобів керування рухом поїздів по колії, яка відрізняється тим, що колеса до локомотивів та вагонів виготовляються з ободами з пружкого тугого матеріалу, а колію будують відповідно до форми і розмірів коліс.2. Транспортна система по п.1, яка відрізняється тим, що колеса вагонів при русі поза колією за тягачем мають можливість...
Транспортна система капітонова (варіанти)

Номер патенту: 76484
Опубліковано: 15.08.2006
Автор: Капітонов Олександр Олександрович
МПК: B61B 15/00, B61B 5/00, B61B 3/00
Мітки: транспортна, варіанти, капітонова, система
Формула / Реферат:
1. Транспортна система, яка містить шляховий трубопровід і транспортний модуль, що включає корпус, вертикальні опорні і горизонтальні напрямні колеса і силову установку з електродвигуном, яка відрізняється тим, що шляховий трубопровід встановлений над землею на естакаді або опорах, і/або підвішений на тросах вантової конструкції, виконаний у вигляді труби збірної конструкції, що складається з однієї або декількох оболонок з легкого листового...
Міжопераційна підвісна транспортна система
Номер патенту: 1462
Опубліковано: 15.10.2002
Автори: Халіп Олег Юрійович, Сібіряков Юрій Григорович
МПК: B65G 63/00
Мітки: транспортна, система, міжопераційна, підвісна
Формула / Реферат:
Міжопераційна підвісна транспортна система, яка містить основний ходовий шлях з двох паралельних віток, розміщений вздовж операційних зон, зональні ходові шляхи, розташовані перпендикулярно основному ходовому шляху, принаймні один перевантажувач, який переміщується по основному ходовому шляху, і принаймні одну вантажонесучу каретку з опорами кочення, при цьому перевантажувач містить принаймні одну напрямну для розміщення вантажонесучої...
Попередній патент: Агрегований кристалічний порошкоподібний кремній, спосіб його одержання і застосування
Наступний патент: Спосіб одержання нітрату бутоконазолу
Випадковий патент: Спосіб розгортання зв'язки космічних тіл з приведенням її до місцевої вертикалі