Цифровий гравіметр для абсолютних вимірів прискорення сили ваги
Номер патенту: 88060
Опубліковано: 10.09.2009
Автори: Карпінський Юрій Олександрович, Сидоренко Горіслав Степанович, Омельченко Анатолій Васильович, Гнатенко Володимир Григорович, Мірошниченко Олег Миколайович

Формула / Реферат
Цифровий гравіметр для абсолютних вимірювань прискорення сили ваги, що містить послідовно розміщені датчик переміщень, перетворювач, обчислювальну систему, а також систему індикації, який відрізняється тим, що перетворювач з'єднаний з обчислювальною системою через узгоджувальний пристрій, який складається з послідовно з'єднаних регулюючого і високошвидкісного підсилювачів, вихід якого з'єднаний з швидкісним аналоговим перетворювачем (ШАП), який підключений до блока керування перетворювачем, що складається із з'єднаних між собою мікросхеми керування пам'яттю та процесора збору і обробки даних, який з'єднаний із постійним запам'ятовуючим пристроєм, причому вихід процесора збору та обробки даних з'єднаний з індикатором та контролером, вихід останнього підключений до блоків програмного забезпечення обробки інформації, виходи яких з'єднані з блоком оцінки просторово-часових параметрів руху датчика переміщень балістичного гравіметра, який підключений до блока визначення прискорення сили ваги.
Текст
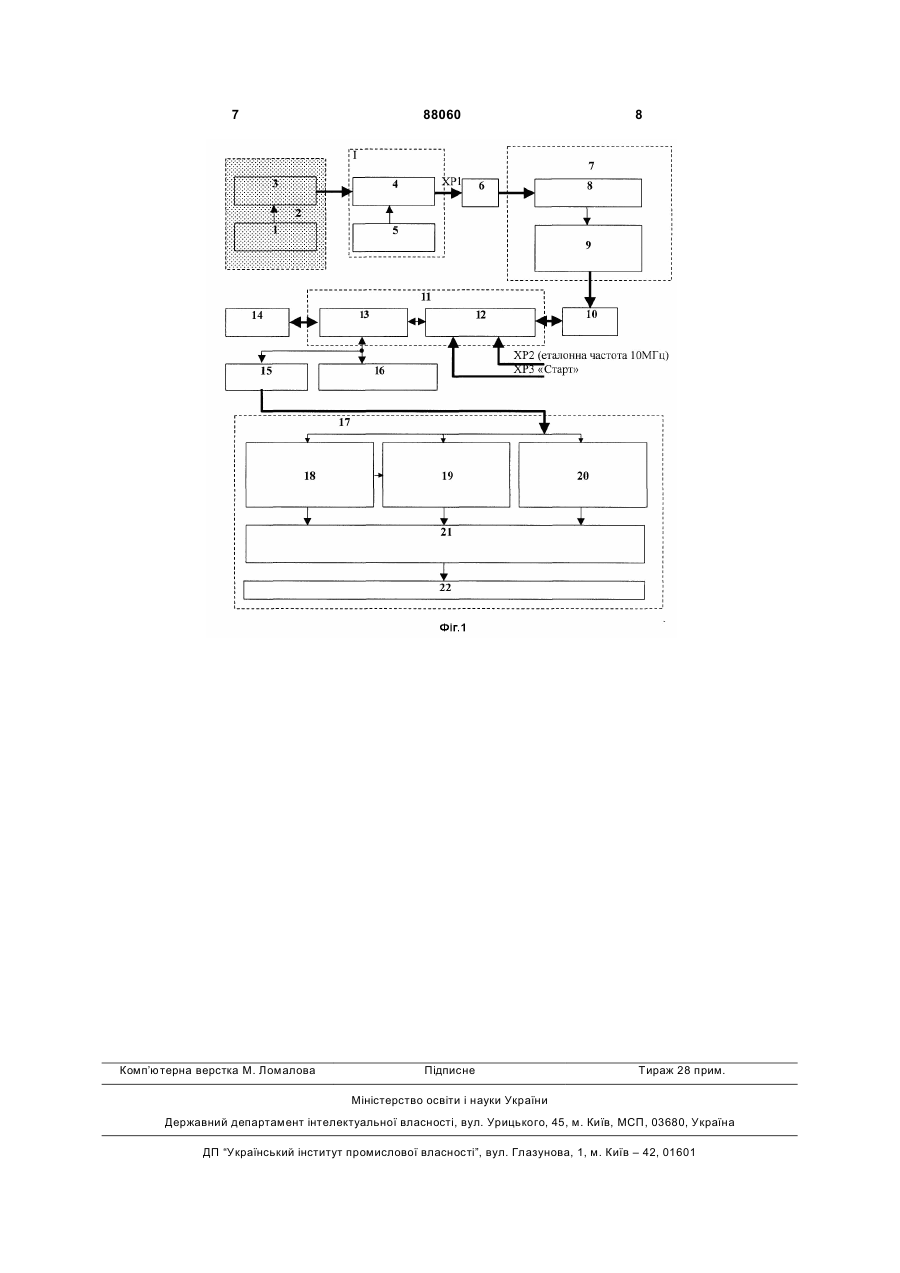
Цифровий гравіметр для абсолютних вимірювань прискорення сили ваги, що містить послідов C2 1 3 тему комутації [2]. що він не дозволяє проводити абсолютні вимірювання ПСВ. (авт. свид. №140825 кл.G01V7/12). Недолік цього гравіметра полягає в тому, що він не дозволяє проводити абсолютні вимірювання ПСВ, а також в тому, що він не забезпечує належної точності гравіметричних вимірювань. В основу винаходу, заявленого пристрою поставлена задача підвищення точності гравіметричних вимірювань, що виконуються в польових умовах. Поставлена задача вирішується за рахунок того, що в цифровому балістичному гравіметрі (ЦБГ), призначеному для абсолютних вимірювань ПСВ, що містить послідовно розміщені датчик переміщень, перетворювач, обчислювальну систему, а також систему індикації, відповідно до пропозиції, перетворювач з'єднаний з обчислювальною системою через узгоджувальний пристрій, який складається з послідовно включених регулюючого і високошвидкісного підсилювачів, а вихід пристрою поданий на АЦП, що підключений до блока керування аналого-цифровим перетворювачем (БКП), який складається з послідовно з'єднаних між собою мікросхеми керування пам'яттю і процесора збору й обробки даних, крім того вихід БКП поданий на постійний запам'ятовуючий пристрій (ПЗП), а також на рідкокристалічний індикатор і контролер, підключений до блока програмного забезпечення (БПЗ) обробки вихідної інформації, виходи яких подані на блок оцінки просторовочасових параметрів руху датчика балістичного гравіметра підключеного до блока визначення прискорення сили ваги. Відмітні ознаки запропонованого пристрою дають можливість: - обробки результатів визначення ПСВ і калібрування гравіметра в польових умовах; - зменшити похибку вимірювань ПСВ, обумовлену впливом зовнішньої та інструментальної сейсміки за рахунок реалізації можливості автономної метрологічної атестації програмно-математичного забезпечення; - реалізувати можливість метрологічної атестації програмного забезпечення для обробки результатів визначення ПСВ на еталонному гравіметричному пункті; - знизити вимоги до рівня розрідження газового середовища в барокамері АБГ. На Фіг.1 зображена схема запропонованого цифрового гравіметру для абсолютних вимірювань ПСВ, що складається з: катапульти 1, яка знаходиться в барокамері 2 разом із розташованим на катапульті динамічним оптичним відбивачем ДБГ 3, що знаходиться у динамічному плечі інтерферометра Майкельсона (ІМ) 4, до складу якого входять також статичний (референтний) оптичний відбивач 5 і ділильна пластина (на рисунку пластину не показано). Вихід інтерферометра Майкельсона 4 через перетворювач 6 подано на узгоджувальній пристрій 7, що складається з послідовно включених підсилювачів: регулюючого 8 і високошвидкісного 9. Вихід електронного узгоджувального пристрою 7 подано на швидкісний аналоговий перетворювач 88060 4 (ШАП) 10, робота якого регулюється з боку блока керування перетворювачем (БКП) 11 за допомогою двостороннього електричного зв'язку. Цей блок складається зі з'єднаних послідовно мікросхеми керування пам'яттю 12, а також процесора збору й обробки даних 13. Вихід БКП паралельно подано на постійний запам'ятовуючий пристрій (ПЗП) 14, контролер USB 15 і на рідко-кристалічний індикатор 16. Вихід контролера 15 поданий на персональний комп'ютер (ПК) 17, що виконує обчислювальні операції у відповідності до спеціально розробленого математичного забезпечення обчислювального процесу, що дозволяє реалізувати принципово нові підходи до обробки первинної вимірювальної інформації, яка реєструється ЦБГ за допомогою адекватного програмного забезпечення, що складається з: - програмного блоку визначення часу досягнення вершини траєкторії ДБГ від моменту його старту 18; - програмного блока, що визначає цілу частину порядку інтерференційного сигналу m 19; - програмного блока що визначає дробову частину порядку інтерференційного сигналу Dm 20; - програмного блока, що виконує оцінку просторово-часових параметрів руху ДБГ при визначенні ПСВ 21; - програмного блока, що визначає ПСВ 22. Робота ЦБГ починається в той момент, коли катапульта 1, яка знаходиться в барокамері 2, підкидає ДБГ 3, що переходить у режим вільного руху в полі сили ваги Землі з прискоренням, значення якого залежить від напруженості гравітаційного поля, тобто від ПСВ у точці спостереження. Частоти оптичних хвиль, що поширюються в динамічному 3 і статичному 4 каналах інтерферометра 5, зміщені відносно одна одної на частоту доплерівского зсуву, що залежить від швидкості руху динамічного відбивача. Вимірюване значення доплерівского зсуву оптичних частот, дозволяє визначити значення напруженості гравітаційного поля, чисельно рівне величині ПСВ. Для рішення цієї задачі аналоговий оптичний сигнал з виходу інтерферометра ХР1 подається на фотоперетворювач 6, що перетворює його в частотно-модульовану послідовність електричних імпульсів (ЛЧМ-сигнал). У цифровому гравіметрі (ЦГ) на ФП 6 реалізується фазова демодуляція ЛЧМ-сигналу, який має місце на виході інтерферометра, що дає можливість зареєструвати і запам'ятати в реальному часі динаміку зміни оцінок параметрів руху ДБГ, а потім і визначити напруженість гравітаційного поля і, відповідно, ПСВ. Така методика визначення ПСВ дозволяє за рахунок багаторазових звертань до одних і тих же результатів прямих вимірювань просторово-часових параметрів руху ДБГ, що відповідають нехтовно малому вимірювальному інтервалу, у продовж якого вимірюване значення ПСВ коректно приймається незмінним, провести метрологічну атестацію ПМЗ на атестованому гравіметричному пункті. 5 Для вирішення цієї задачі сигнал з виходу інтерферометра ХР1 подається через електронний у згоджу вальний пристрій 7. Після відновлення ділильною пластиною сполученого просторового положення променів, що пройшли різні оптичні шляхи в статичному і динамічному каналах ІМ, на катоді фотоприймача (ФП) 6 виникає модуляція інтенсивності оптичного сигналу. Цей сигнал перетворюється ФП 6 в електричний сигнал, поданий на узгоджуваний пристрій 7, що складається з послідовно включених підсилювачів: регулюючого 8 і високошвидкісного 9. Обов'язковою умовою забезпечення працездатності цифрового гравіметра у всьому динамічному діапазоні зміни доплерівского зсуву частоти є наявність регулюючих елементів, що дозволяють формувати на вході АЦП сигнал необхідного рівня. Виходячи з умови теореми Котельнікова і значення максимальної інтерференційної частоти на виході ІМ частота перетворення в ЦГ повинна знаходитися у діапазоні 10-40МГц. Розрядність ШАП 8 біт є достатньою для рішення поставленої задачі. Реалізація алгоритму роботи ЦГ починається в той момент, коли катапульта 1, що знаходиться в барокамері 2, підкидає ДБГ 3, що переходить після дії на нього механічного імпульсу катапульти в режим руху під дією сили ваги Землі. Прискорення цього руху характеризує напруженість гравітаційного поля в точці спостереження. Керування роботою АЦП і збереження даних у пам'яті ПЗП виконує БКП, що складається з програмувальної логічної інтегральної схеми (ПЛІС) 12, а також процесора збору й обробки даних 13, що є основним функціональним елементом блока керування, збору й обробки інформації. Тактова частота ПЛІС, що дорівнює 80 МГЦ, синхронізується петлею ФАПЧ з еталонною частотою 10МГЦ (ХР2). За сигналом «СТАРТ» (ХРЗ) ПЛІС починає генерувати тактову частоту, а також всі інші технологічні сигнали, що подаються на АЦП для забезпечення його функціонування 14. Після повного циклу перетворення аналогового інтерференційного сигналу в цифровий код ПЛІС генерує сигнал про закінчення перетворення. Уся записана в ПЗП інформація контролером USB 15 передається в персональний комп'ютер ПК для подальшої обробки. Відповідно до технічних можливостей USB у гравіметрі застосовується ізохронна передача (Isochronous Transfer), що забезпечує обмін інформації «у реальному часі». Для забезпечення максимальної швидкості передачі даних у гравіметрі реалізовано протокол, у відповідності, до якого контролер USB не накопичує в буфері дані, попередньо прочитані в пам'яті, а безпосередньо посилає їх у USB-порт. Піс 88060 6 ля закінчення перетворення контролер USB видає на ПЛІС сигнал про готовність передачі даних на рідко кристалічний індикатор 16, для візуального контролю результатів процесу перетворення і в комп'ютер 17. Після цього за тактовими сигналами ПЛІС спільно з контролером по черзі передає результати перетворення в комп'ютер 17. На першому кроці програмно-математичного забезпечення (ПМЗ) обробки результатів вимірювань ПСВ програмним блоком 18 визначається час ˆ t від старту ДБГ до моменту часу в який ДБГ досягає вершини траєкторії свого польоту. Для цієї мети використовують аналітичні співвідношення: æ M g é ù ö ÷ ç ˆ t = argç å C k × exp ê j2 p × 0 × (k D - t )2 ú ÷, l ç k = -M ë û ÷ t è ø де t - час від старту ДБГ; М - верхнє значення індексу сумування; Хk - k-ий відлік інтерференційного сигналу; g0 - номінальне значення ПСВ, l довжина хвилі лазера; D - інтервал дискретизації. На другому кроці алгоритму ПМЗ (19) цифрового гравіметра визначається ціла частина порядку інтерференційного сигналу mk. На третьому кроці ПМЗ алгоритму обробки вихідної інформації з інтерферометра ЦГ (20) визначається дробова частина порядку інтерференційного сигналу dk, для чого використовується відношення æX ö 1 dk = arcsinç k ÷, çA ÷ p è kø ˆ ˆ X2 + X2 ; Хk, Xk - відповідно відліки k k сигналу з виходу АЦП та його цифрове перетворення Гільберта. На четвертому кроці в ПМЗ 21 знаходяться оцінки положення датчика по висоті відповідно до співвідношень де Ak = l ì ˆ {mk + qk × dk }, якщо k × D t ˆ ï4 î де параметр qk=1, якщо в найближчому переході через 0 значення сигналу змінюється з від'ємних на додатні, а в іншому випадку qk=-1, а також обчислюються відповідні відліки часу tk=k×D, k=1, 2,... . На п'ятому кроці ПМЗ 22 за методом найменших квадратів обчислюється вимірюване значення ПСВ. При цьому для оцінювання ПСВ враˆ ховуються тільки ті оцінки hk, де сигнал приймає значення, близькі до нуля. 7 Комп’ютерна верстка М. Ломалова 88060 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDigital gravimeter for absolute measurement of acceleration of gravity
Автори англійськоюSydorenko Horyslav Stepanovych, Miroshnychenko Oleh Mykolaiovych, Omelchenko Anatolii Vasyliovych, Hnatenko Volodymyr Hryhorovych, Karpinskyi Yurii Oleksandrovych
Назва патенту російськоюЦифровой гравиметр для абсолютных измерений ускорения силы тяжести
Автори російськоюСидоренко Горислав Степанович, Мирошниченко Олег Николаевич, Омельченко Анатолий Васильевич, Гнатенко Владимир Григорьевич, Карпинский Юрий Александрович
МПК / Мітки
МПК: G01V 7/00
Мітки: абсолютних, ваги, прискорення, гравіметр, цифровий, вимірів, сили
Код посилання
<a href="https://ua.patents.su/4-88060-cifrovijj-gravimetr-dlya-absolyutnikh-vimiriv-priskorennya-sili-vagi.html" target="_blank" rel="follow" title="База патентів України">Цифровий гравіметр для абсолютних вимірів прискорення сили ваги</a>
Гравіметр для вимірів абсолютного значення прискорення сили тяжіння
Номер патенту: 87638
Опубліковано: 27.07.2009
Автор: Федоровський Борис Миколайович
Мітки: гравіметр, значення, абсолютного, тяжіння, сили, прискорення, вимірів
Формула / Реферат:
Гравіметр для вимірів абсолютного значення прискорення сили тяжіння симетричним способом на морі, який містить: електронний блок регулювання, прилад з відеоекраном, що сполучений з електронним блоком регулювання, соленоїд, сполучений з електронним блоком регулювання; несучий елемент, розташований всередині соленоїда, який має систему електромагнітного центрування, сполучену з електронним блоком регулювання; причому на несучому елементі...
Гравіметр для вимірювання абсолютного значення прискорення сили ваги
Номер патенту: 6921
Опубліковано: 31.03.1995
Автор: Федоровський Борис Миколайович
МПК: G01V 7/00
Мітки: абсолютного, ваги, сили, прискорення, значення, вимірювання, гравіметр
Формула / Реферат:
(57) . Гравиметр для измерения абсолютного значения ускорения силы тяжести, содержащий пробное тело, выполненное в виде уголкового светоотражателя и помещенное в вакуумную камеру, интерферометр, систему измерения пути и времени свободного движения пробного тела, блок управления измерениями и катапульту для подбрасывания пробного тела вертикально вверх на заданную высоту, состоящую из катушки соленоида и сердечника, связанного с...
Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння
Номер патенту: 79874
Опубліковано: 25.07.2007
Автори: Безвесільна Олена Миколаївна, Подчашинський Юрій Олександрович
МПК: G01V 7/00
Мітки: система, аномалій, гравіметрична, тяжіння, вимірювань, авіаційна, сили, прискорення
Формула / Реферат:
Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння, що містить гіроскопічний гравіметр (1), систему визначення навігаційних параметрів (2) та вимірювач висоти (3), які підключені до бортової цифрової обчислювальної машини (БЦОМ) (4), яка відрізняється тим, що гіроскопічний гравіметр (1) містить два триступеневі гіроскопи (8, 9), ротори яких виконані такими, що обертаються в протилежні боки, а їх центри мас...
Спосіб стиснення гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння
Номер патенту: 82763
Опубліковано: 12.05.2008
Автори: Безвесільна Олена Миколаївна, Подчашинський Юрій Олександрович
МПК: G01V 7/00
Мітки: вимірювальної, тяжіння, стиснення, прискорення, спосіб, гравіметричної, аномалії, сили, інформації
Формула / Реферат:
Спосіб стиснення гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння, що включає стиснення двовимірного масиву цифрових відліків гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння, який відрізняється тим, що формування масиву здійснюють шляхом занесення в нього цифрових відліків гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння з урахуванням прив'язки до...
Спосіб оптичного вимірювання величини прискорення сили тяжіння
Номер патенту: 33397
Опубліковано: 15.02.2001
Автори: Гніденко Микола Володимирович, Бурачек Всеволод Германович
МПК: G01N 13/00, G01N 13/10
Мітки: оптичного, сили, спосіб, прискорення, тяжіння, величини, вимірювання
Текст:
...ge = 1/12G * ке, звідки ке = & * і2е; (7) Де ge - прискорення сили тяжіння на пункті з відомим значенням величини прискорення сили тяжіння; і 1е - відстань між елементами смуги поглинання на пункті з відомим значенням величини прискорення сили тяжіння. На робочому пункті визначають величину прискорення сили тяжіння за формулою: gp=l/l P 2 * k c , Де gp - прискорення сили тяжіння на робочому пункті ; 1 Р - відстань між елементами...
Попередній патент: Циклон
Наступний патент: Гравігеодезичний спосіб атестації гравіметричних пунктів та пристрій для його здійснення
Випадковий патент: Спосіб консервативного лікування аденоми передміхурової залози з використанням продуктів бджільництва