Гравігеодезичний спосіб атестації гравіметричних пунктів та пристрій для його здійснення
Номер патенту: 88061
Опубліковано: 10.09.2009
Автори: Сидоренко Горіслав Степанович, Мірошниченко Олег Миколайович, Заяц Іван Миколайович, Омельченко Анатолій Васильович

Формула / Реферат
1. Гравігеодезичний спосіб атестації гравіметричних пунктів, при якому прискорення сили ваги (ПСВ) на гравіметричних пунктах вимірюють балістичним гравіметром, який відрізняється тим, що синхронно з вимірюванням ПСВ визначають геодезичні координати інформаційної точки гравіметра, якій відповідає зміряне значення ПСВ і яка є віртуальним гравіметричним пунктом, а потім визначають і вводять в реальному часі поправку для корекції виміряного значення ПСВ з урахуванням припливних варіацій, які діють на момент вимірювання ПСВ, після чого визначають вертикальний градієнт в момент атестації гравіметричних пунктів, значення якого використовують для корекції зміряного значення ПСВ вздовж вертикалі будь-якої точки простору над гравіметричним пунктом.
2. Гравіметричний комплекс для атестації гравіметричних пунктів, який складається із датчика балістичного гравіметра з рухомим оптичним відбивачем випромінювання лазерного інтерферометра та системи обробки вимірювальної інформації і індикації, який відрізняється тим, що додатково містить опору гравігеодезичного пристрою разом з розміщеним на ній механізмом установки фазового центра антени приймача сигналів в точку з координатою, яка задана за вертикаллю, каліброваною віддаллю між просторовим положенням фазового центра антени приймача сигналів глобальної навігаційної супутникової системи (ГНСС) і інформаційною точкою гравіметра, яка одночасно є гравіметричним пунктом, положення якого визначене аналітично з врахуванням реального закону руху оптичного відбивача датчика балістичного гравіметра, крім того на опорі розташований механізм для узгодження інформаційної точки гравіметра з віртуальним гравіметричним пунктом, причому вихід балістичного гравіметра з'єднаний з входом програмного блока визначення прискорення сили ваги, а вихід приймача ГНСС з'єднаний з входом програмного блока обчислення геодезичних координат фазового центра антени приймача ГНСС, при цьому виходи блоків визначення прискорення сили ваги і обчислення геодезичних координат фазового центра підключені до входів блока пам'яті, з входом блока пам'яті, підключеного до блока обчислення вертикального градієнта, також з'єднаний вихід блока визначення припливної поправки, крім того виходи блоків обчислення геодезичних координат фазового центра антени приймача ГНСС і блока обчислення вертикального градієнта відповідно з'єднані з блоком реєстрації та індикації.
Текст
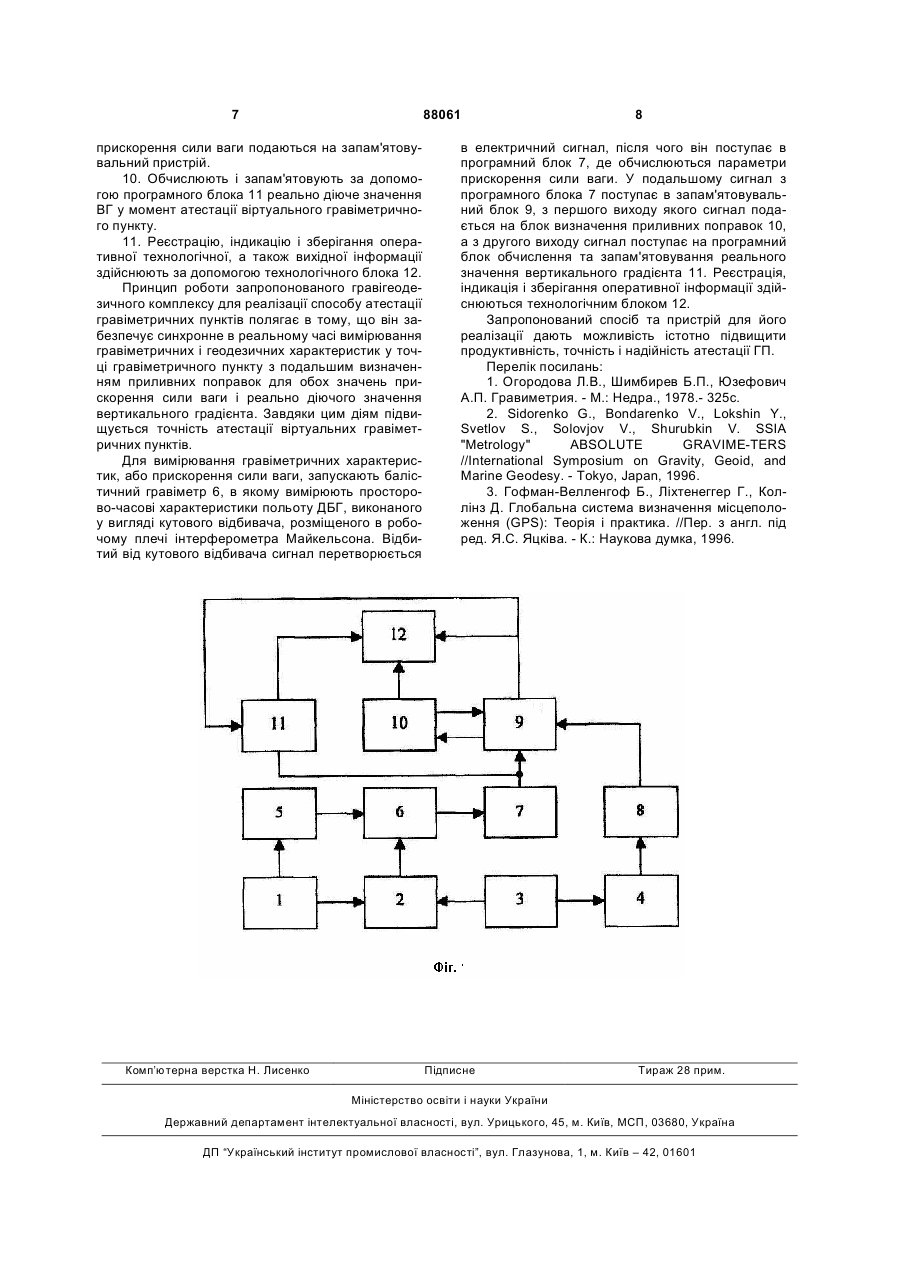
1. Гравігеодезичний спосіб атестації гравіметричних пунктів, при якому прискорення сили ваги (ПСВ) на гравіметричних пунктах вимірюють балістичним гравіметром, який відрізняється тим, що синхронно з вимірюванням ПСВ визначають геодезичні координати інформаційної точки гравіметра, якій відповідає зміряне значення ПСВ і яка є віртуальним гравіметричним пунктом, а потім визначають і вводять в реальному часі поправку для корекції виміряного значення ПСВ з урахуванням припливних варіацій, які діють на момент вимірювання ПСВ, після чого визначають вертикальний градієнт в момент атестації гравіметричних пунктів, значення якого використовують для корекції зміряного значення ПСВ вздовж вертикалі будьякої точки простору над гравіметричним пунктом. 2. Гравіметричний комплекс для атестації гравіметричних пунктів, який складається із датчика балі C2 2 (11) 1 3 ФОГМ, адекватно збільшуючи вартість, трудомісткість і терміни створення, чи модернізації цієї мережі. Відомий пристрій для реалізації способу атестації гравіметричних пунктів, який має статичний датчик ПСВ, функціонально пов'язаний з перетворювачем сигналу та індикатором. Недоліком цього засобу, відповідно до особливостей вищевикладеного методу, є висока собівартість атестації ГП, яка обумовлена необхідністю експлуатації дорогих ФОГМ. За прототип пропонованого способу атестації ГП використано спосіб, при якому ПСВ на ГП вимірюють балістичним гравіметром (БГ) [2]. Цей метод ґрунтується на законі всесвітнього тяжіння. Він дає змогу визначати шлях, пройдений датчиком балістичного гравіметра (ДБГ) під дією сили ваги за виміряний час. Недоліком зазначеного способу є те, що при такому способі ПСВ виміряється на протяжній ділянці траєкторії падіння ДБГ, у той час як для практичних цілей виміряне значення ПСВ необхідно віднести до деякої точки простору з відомими геодезичними координатами, інакше при високоточних гравіметричних вимірюваннях ПСВ виникає додаткове джерело похибки його вимірювань. Відомий пристрій для реалізації вищенаведеного способу атестації ГП, виконаний на основі абсолютного балістичного гравіметра (АБГ). Його недоліком є те, що він не дозволяє враховувати зміни ПСВ, які виникають за рахунок змін геодезичних параметрів ГП, що мають місце під час вимірювань ПСВ. В основу запропонованого гравігеодезичного способу поставлена задача підвищення продуктивності, точності і надійності атестації ГП. Поставлена задача вирішується за рахунок того, що в гравігеодезичному способі атестації ГП, при якому ПСВ на ГП вимірюють АБГ, згідно з винаходом, синхронно з вимірюванням ПСВ визначають геодезичні координати інформаційної точки гравіметра (ІТГ), якій відповідає виміряне значення ПСВ та яка є віртуальним гравіметричним пунктом (ВГП), а потім розраховують та вводять у реальному часі поправку, яка коригує виміряне значення ПСВ з урахуванням приливних варіацій, що діють у момент вимірювання ПСВ, після чого визначають значення вертикального градієнта у момент атестації ГП, яке використовують для редукції виміряного значення ПСВ уздовж вертикалі у будьяку точку простору над ГП. В основу заявленого пристрою поставлена задача підвищення продуктивності, точності і надійності атестації ГП. Пристрій для реалізації способу виконаний у вигляді гравігеодезичного комплексу, в який входять БГ та приймач сигналів глобальної навігаційної супутникової системи (ГНСС), причому до складу БГ входять ДБГ, розміщений в динамічному плечі інтерферометра Майкельсона (ІМ), вихід якого подано на систему обробки вимірювальної інформації, підключеної до системи індикації. Згідно з винаходом, до складу комплексу включено опору (фундамент) гравігеодезичного пристрою разом із розміщеним на ньому механізмом устано 88061 4 вки фазового центра антени (ФЦА) приймача сигналів ГНСС в точку з координатою, заданою по вертикалі каліброваною віддаллю між просторовим положенням ФЦА приймача та ІТГ. На опорі гравіметра розміщено також механізм узгодження ІТГ з ВГП, причому вихід БГ подано на вхід програмного блока визначення ПСВ, а вихід приймача ГНСС подано на вхід програмного блока розрахунку геодезичних координат ФЦА приймача ГНСС, крім того виходи програмних блоків визначення ПСВ та розрахунку геодезичних координат ФЦА приймача ГНСС подані на блок реєстрації та індикації вихідної інформації. Відмітні ознаки запропонованого комплексу для реалізації способу атестації ГП дають змогу істотно підвищити точність та продуктивність атестації ГП впольових умовах. Запропонований гравігеодезичний спосіб атестації ГП реалізують при послідовному виконанні наведених нижче технологічних операцій: 1. Визначають та ідентифікують ФЦА антени приймача сигналів ГНСС. 2. Встановлюють і фіксують геодезичний штатив разом із лазерним інтерферометром і антеною приймача сигналів ГНСС так, щоб планові еліпсоїдальні координати ФЦА, які контролюються методами ГНСС - технологій, збіглися би із заданими плановими еліпсоїдальними координатами ВГП. 3. Визначають та ідентифікують по висоті стартове просторове положення динамічного відбивача лазерного інтерферометра відносно нерухомих елементів БГ. 4. Вимірюють просторово-часові параметри (ПЧП) траєкторії вільного падіння динамічного відбивача БГ і визначають попереднє значення ПСВ на ВГП. 5. Синхронно з вимірюванням ПЧП траєкторії вільного руху відбивача ДБГ, методом ГНССтехнологій вимірюють еліпсоїдальні координати ВГП, що атестується. 6. Фіксують результати попереднього визначення ПСВ на ВГП та зміряні реальні координати ВГП. 7. Після виконання первинної гравіметричної атестації ВГП гравіметр переміщують по вертикалі вгору на віддаль 40-60см і повторюють операції за пунктами 2-6. На Фіг. показано схему пристрою, для реалізації запропонованого способу. Пристрій складається з опори (гравіметричного фундаменту) 1, на якому розташований механізм 2 у вигляді геодезичного штативу для поєднання по вертикалі просторового положення ФЦА 3 приймача сигналів ГНСС 4 із заданими еліпсоїдальними координатами точки простору, відносно якої конструктивно задається, а потім ідентифікується на нерухомих деталях штатива з необхідною точністю просторове положення інформаційної позначки координат (ІПК), з якою повинно співпадати просторове положення ВГП, що атестується. На цьому ж фундаменті розташований механізм 5 для поєднання інформаційної позначки гравіметра (ІПГ), в якій він вимірює ПСВ з положенням ВГП, який повинен співпадати з ІПК та в якій на ВГП балістичний гравіметр 6 вимірює ПСВ, ви 5 хід якого подано на програмний блок для обчислення результатів вимірювання 7. Вихід приймача сигналів ГНСС 4 подано на вхід програмного блока визначення еліпсоїдальних координат ВГП, який атестується 8. Виходи програмних блоків 7, 8 подані на запам'ятовуючий пристрій 9. На цей же пристрій поданий вихід блока визначення величини приливних поправок 10 для обчислення величини реального значення вертикального градієнта (ВГ) 11. Виходи блоків 9, 10 і 11 подані на блок реєстрації та індикації 12. Нижче наводиться приклад виконання запропонованого гравігеодезичного способу атестації ГП. 1. Геодезичний штатив разом із лазерним інтерферометром і антеною приймача сигналів ГНСС встановлюють і фіксують відносно опори 1 так, щоб планові еліпсоїдальні координати ФЦА, що контролюються методами ГНСС-технологій, збіглися б із заданими плановими еліпсоїдальними координатами ВГП, що атестується. 2. Відомим способом [3] вираховується вертикальна еліпсоїдальна координата ФЦА приймача сигналів ГНСС, яка з метою гарантованого виключення екранування сигналів супутників ГНСС розташована вище інтерферометра БГ. Розраховане у локальній системі координат просторове вертикальне геодезичне положення ФЦА по відношенню до орбіт супутників ГНСС ВГП є сумою вертикальної еліпсоїдальної координати точки простору, розташованої над ВГП на відомій незмінній каліброваній відстані уздовж вертикалі між ФЦА і ВГП та заданої вертикальної еліпсоїдальної координати ВГП, що атестується. Рівень просторового вертикального положення ВГП відзначається ідентифікаційною позначкою координат (ІПК) на одному із рухомих елементів геодезичного штативу, який зміщається під час підготовки гравігеодезичного комплексу (ГГК) до атестації ГП. 3. Конструктивними розрахунками визначається стартове просторове положення h0 відбивача лазерного інтерферометра відносно нерухомих елементів БГ у момент початку руху. Визначене по відношенню до нерухомих елементів БГ стартове просторове положення h0 відбивача лазерного інтерферометра у момент початку руху позначається ідентифікаційною позначкою гравіметра (ІПГ) на одному з елементів геодезичного штатива, що зміщуються під час підготовки гравігеодезичного комплексу (ГГК) до атестації ВГП. 3. Механізмом 2 ФЦА 3 переміщується вздовж вертикалі до збігу еліпсоїдальних координат ФЦА, що контролюються методами ГНСС-технологій, з розрахованими еліпсоїдальними координатами ФЦА. Коректність операції, що виконується, контролюється за допомогою табло контролера приймача сигналів ГНСС 4. 4. Визначається висота ВГП над ІПК hВГП = h 0 + hІТГ , де hВГП - висота ВГП по відношенню до ІПК; h0 - висота позиції старту оптичного відбивача лазерного інтерферометра на початку вимірюва 88061 6 льного циклу визначення ПСВ [0,Т] у момент, коли t=0, відносно ІПК; hІТГ - висота ІТГ, якій відповідає виміряне на заданій ділянці падіння відбивача інтерферометра значення ПСВ відносно висоти позиції старту ДБГ. У загальному випадку висота ІТГ обраховується за формулою T æ t2 ö hITГ = ò WN ( t ) × ç n 0 t - g0 × ÷ × dt, ç 2 ÷ 0 è ø де wN(t) - вагова функція БГ, що залежить від метода вимірювання та числа рівнів вимірювання N [2]; Т - тривалість вимірюваного інтервалу вимірювання ПСВ; n0 - швидкість відбивача лазерного інтерферометра в момент часу t=0; g0 - номінальне значення ПСВ у момент часу t=0. При симетричному способі вимірювання ПСВ ефективна висота гравіметра має позитивне значення, а при несиметричному - негативне значення. Для симетричних балістичних гравіметрів з числом рівнів вимірювання більше 30-ти hІТГ » 6Н/7 при рівномірній дискретизації у часі і hІТГ » 5H/6 при рівномірній дискредитації за рівнем, де Н максимальна висота польоту оптичного відбивача лазерного інтерферометра (вершина траєкторії польоту), що визначається за формулою T2 . 8 Для підвищення точності визначення просторового положення ІТГ в умовах нестабільної роботи механічних елементів та вузлів катапульти датчика БГ використовується примусова рандомізація висоти польоту відбивача датчика БГ і кореляційний метод визначення вершини траєкторії. 5. Після попередньої настройки гравігеодезичного комплексу виконують вимірювання ПЧП траєкторії вільного руху відбивача ДБГ 6 та за допомогою програмного блока 7 обчислюють значення ПСВ на ВГП, що атестується. 6. Синхронно з вимірюванням ПВП траєкторії вільного руху відбивача датчика балістичного гравіметра приймачем сигналів ГНСС 8 виконують вимірювання еліпсоїдальних координат віртуального гравіметричного пункту, що атестується. 7. Результати первинного визначення прискорення сили ваги на віртуальному гравіметричному пункті g1ВПГ і виміряні реальні координати віртуального гравіметричного пункту x1ВГП, у1ВГП і z1ВГП вводять у блок оперативної пам'яті 9. 8.Після виконання первинної гравіметричної атестації віртуального гравіметричного пункту, який ідентифікують зміряними координатами X1ВГП, у1ВГП і Z1ВГП, гравіметр переміщують вгору по вертикалі на віддаль 40-60см і повторюють операції, які виконують згідно з пунктами 2-7, і отримують значення g2ВГП в координатах x2ВГП, у2ВГП і z2ВГП. 9. За допомогою програмного блока 10 обчислюють і в реальному часі вводять у виміряні величини g коригуючі поправки на приливні варіації прискорення сили ваги. Відкориговані значення H = g0 7 88061 прискорення сили ваги подаються на запам'ятовувальний пристрій. 10. Обчислюють і запам'ятовують за допомогою програмного блока 11 реально діюче значення ВГ у момент атестації віртуального гравіметричного пункту. 11. Реєстрацію, індикацію і зберігання оперативної технологічної, а також вихідної інформації здійснюють за допомогою технологічного блока 12. Принцип роботи запропонованого гравігеодезичного комплексу для реалізації способу атестації гравіметричних пунктів полягає в тому, що він забезпечує синхронне в реальному часі вимірювання гравіметричних і геодезичних характеристик у точці гравіметричного пункту з подальшим визначенням приливних поправок для обох значень прискорення сили ваги і реально діючого значення вертикального градієнта. Завдяки цим діям підвищується точність атестації віртуальних гравіметричних пунктів. Для вимірювання гравіметричних характеристик, або прискорення сили ваги, запускають балістичний гравіметр 6, в якому вимірюють просторово-часові характеристики польоту ДБГ, виконаного у вигляді кутового відбивача, розміщеного в робочому плечі інтерферометра Майкельсона. Відбитий від кутового відбивача сигнал перетворюється Комп’ютерна верстка Н. Лиcенко 8 в електричний сигнал, після чого він поступає в програмний блок 7, де обчислюються параметри прискорення сили ваги. У подальшому сигнал з програмного блока 7 поступає в запам'ятовувальний блок 9, з першого виходу якого сигнал подається на блок визначення приливних поправок 10, а з другого виходу сигнал поступає на програмний блок обчислення та запам'ятовування реального значення вертикального градієнта 11. Реєстрація, індикація і зберігання оперативної інформації здійснюються технологічним блоком 12. Запропонований спосіб та пристрій для його реалізації дають можливість істотно підвищити продуктивність, точність і надійність атестації ГП. Перелік посилань: 1. Огородова Л.В., Шимбирев Б.П., Юзефович А.П. Гравиметрия. - М.: Недра., 1978.- 325с. 2. Sidorenko G., Bondarenko V., Lokshin Y., Svetlov S., Solovjov V., Shurubkin V. SSIA "Metrology" ABSOLUTE GRAVIME-TERS //International Symposium on Gravity, Geoid, and Marine Geodesy. - Tokyo, Japan, 1996. 3. Гофман-Велленгоф Б., Ліхтенеггер Г., Коллінз Д. Глобальна система визначення місцеположення (GPS): Теорія і практика. //Пер. з англ. під ред. Я.С. Яцківа. - К.: Наукова думка, 1996. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюGravi-geodesic method for certification of gravimetric points and device for its realization
Автори англійськоюSydorenko Horyslav Stepanovych, Miroshnychenko Oleh Mykolaiovych, Omelchenko Anatolii Vasyliovych, Zaiats Ivan Mykolaiovych
Назва патенту російськоюГравигеодезический способ аттестации гравиметрических пунктов и устройство для его осуществления
Автори російськоюСидоренко Горислав Степанович, Мирошниченко Олег Николаевич, Омельченко Анатолий Васильевич, Заяц Иван Николаевич
МПК / Мітки
МПК: G01V 7/00
Мітки: гравіметричних, гравігеодезичний, здійснення, атестації, спосіб, пристрій, пунктів
Код посилання
<a href="https://ua.patents.su/4-88061-gravigeodezichnijj-sposib-atestaci-gravimetrichnikh-punktiv-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Гравігеодезичний спосіб атестації гравіметричних пунктів та пристрій для його здійснення</a>
Спосіб підвищення чутливості приймача gps (варіанти) і пристрій для його здійснення (варіанти)
Номер патенту: 64809
Опубліковано: 15.03.2004
Автори: лазко Серґей А., Соліман Самір С., Аґаше Параґ А.
Мітки: пристрій, варіанти, здійснення, підвищення, приймача, спосіб, чутливості
Формула / Реферат:
1. Спосіб підвищення чутливості приймача GPS, який включає операції:а) прийому сигналу GPS від супутника GPS,б) визначення, чи має приймач джерело для синхронізації за часом GPS окрім самого супутника GPS, ів) якщо у наявності є джерело для синхронізації за часом GPS окрім цього супутника GPS, то1) визначення з цього джерела для синхронізації меж сукупності кодових періодів у прийнятому сигналі GPS,2)...
Спосіб визначення показника заломлення середовища і пристрій для його здійснення
Номер патенту: 64806
Опубліковано: 15.03.2004
Автори: Скрипник Юрій Олексійович, Шмаров Валерій Миколайович, Ільєнко Анатолій Миколайович
МПК: G01N 21/45
Мітки: середовища, спосіб, визначення, показника, здійснення, пристрій, заломлення
Формула / Реферат:
1. Спосіб визначення показника заломлення середовища, який включає розділення монохроматичного когерентного випромінювання на два промені, суміщення зондуючого випромінювання з опорним випромінюванням з утворенням інтерференційної смуги в полі зору оптичного приймача з наступним обрахуванням показника заломлення, який відрізняється тим, що після розділення оптичного випромінювання на два промені зміщують частоту одного променя до його...
Спосіб атестації насосних агрегатів в умовах експлуатації та насосна станція для його реалізації
Номер патенту: 32101
Опубліковано: 15.12.2000
Автори: Сорокопут Валерій Леонідович, Чумаченко Анатолій Олександрович, Стеценко Анатолій Іванович, Костильов Володимир Васильович
МПК: F04B 51/00
Мітки: станція, експлуатації, агрегатів, атестації, реалізації, насосних, спосіб, умовах, насосна
Текст:
...заслінки інших агрегатів, після чого на протязі інтервала часу Твим вимірюють об'єм перекачаної рідини V і спожиту енергію Е, а по одержаним даним визначають відносну витрату енергії. Спосіб по п.2 відрізняється тим, що для вимірювання об'єму рідини V і кількості енергії Е інтегрують на протязі інтервала часу ТВІШ сумарні по всім колекторам миттєві витрати і спожиту контрольованим насосним агрегатом електричну потужність відповідно,...
Спосіб виміру вигину ствола вогнепальної зброї і пристрій для його здійснення
Номер патенту: 79770
Опубліковано: 25.07.2007
Автори: Смішко Григорій Павлович, Бусяк Юрій Митрофанович, Корольов Анатолій Миколайович, Егліт Микола Олександрович, Борисюк Михайло Дем'янович, Шевельов Андрій Геннадійович, Коростельов Олег Петрович
МПК: G01B 11/00, F41G 7/20
Мітки: зброї, виміру, ствола, здійснення, вогнепальної, вигину, спосіб, пристрій
Формула / Реферат:
1. Спосіб виміру вигину артилерійського ствола, який полягає в тому, що вигин ствола визначається по положенню направленого випромінювання точкового джерела, відбитого від дзеркала, установленого на дульному зрізі ствола, який відрізняється тим, що відбите від дзеркала оптичне випромінювання піддається круговому розгорненню, фокусується на чотириплощадковому фотоприймачі з ортогональним розташуванням чутливих площадок, а вигин ствола...
Спосіб обробки радіосигналів навігаційних супутників gps і глонасс та пристрій для його здійснення
Номер патенту: 33744
Опубліковано: 15.02.2001
Автори: Дубінко Юрій Сергійович, Борсук Олег Анатолійович, Батіщев Сергій Миколайович, Кириченко Олександр Іванович
МПК: H04B 1/06
Мітки: пристрій, радіосигналів, глонасс, супутників, навігаційних, обробки, здійснення, спосіб
Текст:
...широкосмугової фільтрації, широкосмугового підсилення, перетворення частоти з використанням гетеродинної частоти, яку одержують від синтезатора гетеродинної частоти, широкосмугового підсилення проміжної частоти, аналогоцифрового перетворення сигналів із виходу відеопідсилювача з обмеженою смугою пропускання і цифрової обробки сигналів, відрізняє ться тим, що операцію перетворення частоти сигналу виконують з використанням гетеродинної...
Попередній патент: Цифровий гравіметр для абсолютних вимірів прискорення сили ваги
Наступний патент: Пристрій випарювальний з попереднім розпиленням
Випадковий патент: Борона надикти-аюбова для обробітку ґрунту під пар