Пропорційно-інтегрально-диференційний регулятор
Номер патенту: 88408
Опубліковано: 11.03.2014
Автори: Кулєшова Елла Іванівна, Гусєнцова Яна Алімівна, Коваленко Алім Олексійович, Шьоткіна Любов Костянтинівна, Олійник Юлія Ігорівна, Мінін Сергій Андрійович, Орсік Євгенія Вікторівна

Формула / Реферат
Пропорційно-інтегрально-диференційний регулятор, що містить пропорційну, інтегральну і диференційну комірки, на вхід яких подається вхідний сигнал, а виходи подаються на суматор, на виході якого формується сигнал виходу, який відрізняється тим, що застосовується комірка визначення знаку похідної, на вхід якої подається вхідний сигнал, а вихід подається на вхід кожної комірки - пропорційної, інтегральної і диференційної, і в залежності від нього змінюються коефіцієнти настроювання кожної комірки.
Текст
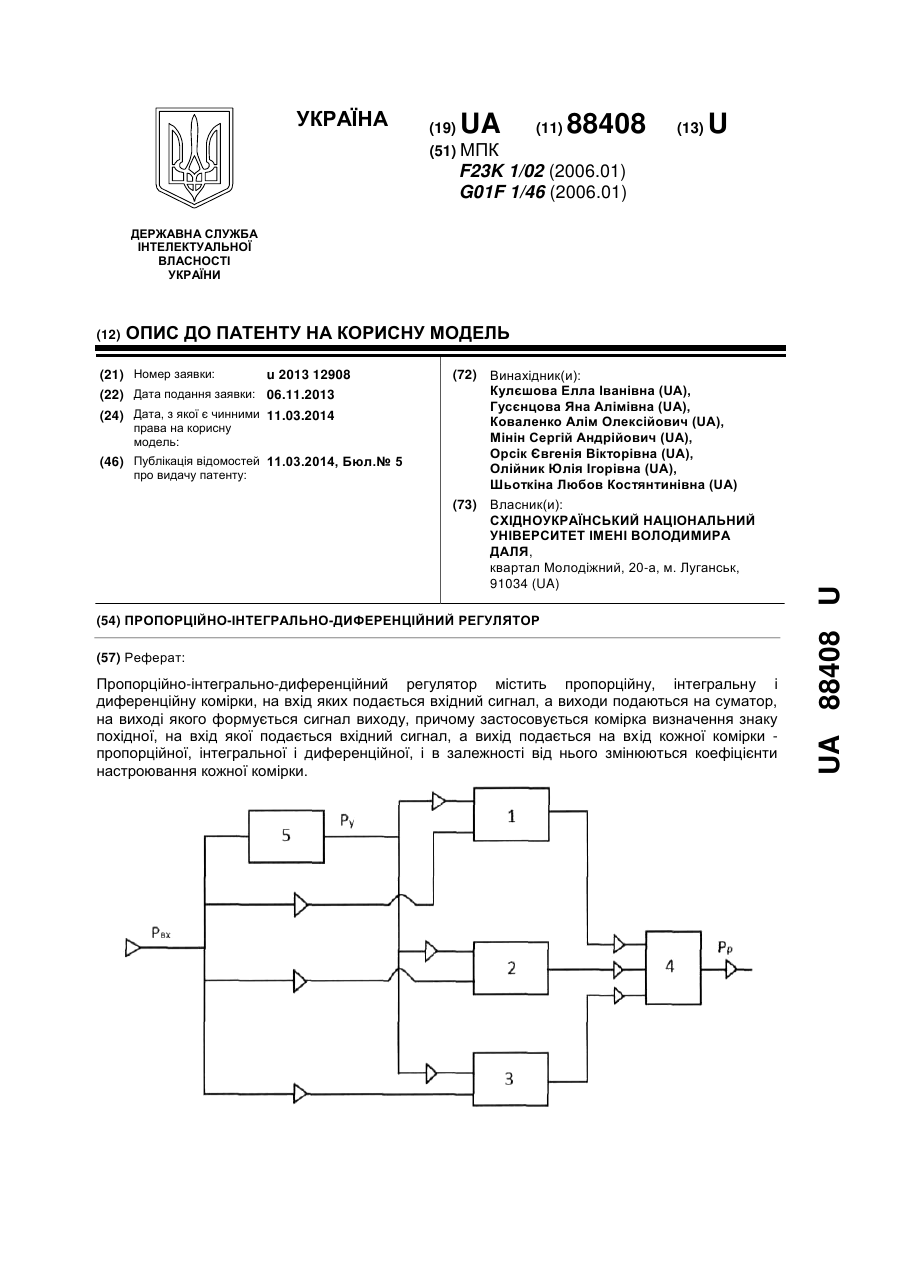
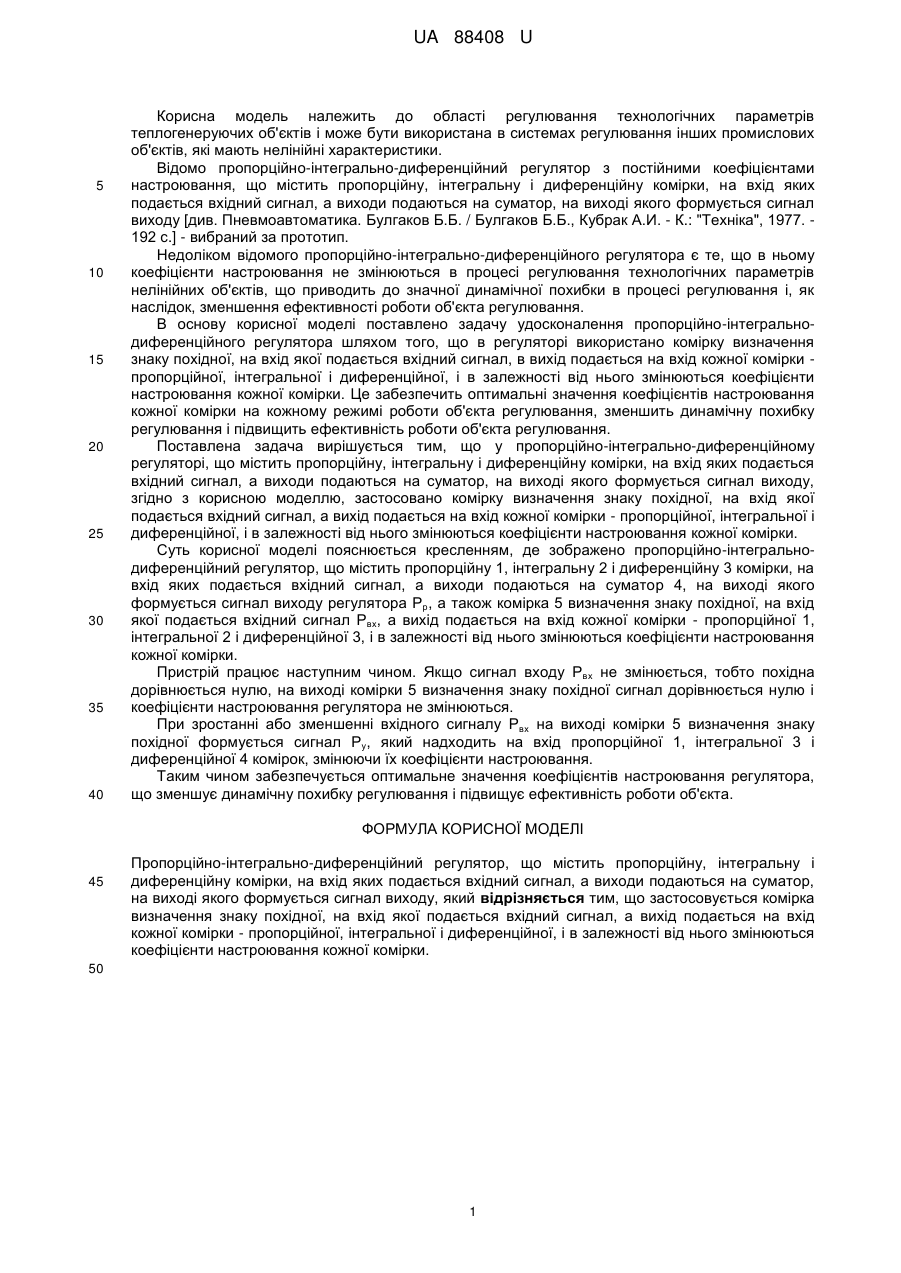
Реферат: Пропорційно-інтегрально-диференційний регулятор містить пропорційну, інтегральну і диференційну комірки, на вхід яких подається вхідний сигнал, а виходи подаються на суматор, на виході якого формується сигнал виходу, причому застосовується комірка визначення знаку похідної, на вхід якої подається вхідний сигнал, а вихід подається на вхід кожної комірки пропорційної, інтегральної і диференційної, і в залежності від нього змінюються коефіцієнти настроювання кожної комірки. UA 88408 U (12) UA 88408 U UA 88408 U 5 10 15 20 25 30 35 40 Корисна модель належить до області регулювання технологічних параметрів теплогенеруючих об'єктів і може бути використана в системах регулювання інших промислових об'єктів, які мають нелінійні характеристики. Відомо пропорційно-інтегрально-диференційний регулятор з постійними коефіцієнтами настроювання, що містить пропорційну, інтегральну і диференційну комірки, на вхід яких подається вхідний сигнал, а виходи подаються на суматор, на виході якого формується сигнал виходу [див. Пневмоавтоматика. Булгаков Б.Б. / Булгаков Б.Б., Кубрак А.И. - К.: "Техніка", 1977. 192 с.] - вибраний за прототип. Недоліком відомого пропорційно-інтегрально-диференційного регулятора є те, що в ньому коефіцієнти настроювання не змінюються в процесі регулювання технологічних параметрів нелінійних об'єктів, що приводить до значної динамічної похибки в процесі регулювання і, як наслідок, зменшення ефективності роботи об'єкта регулювання. В основу корисної моделі поставлено задачу удосконалення пропорційно-інтегральнодиференційного регулятора шляхом того, що в регуляторі використано комірку визначення знаку похідної, на вхід якої подається вхідний сигнал, в вихід подається на вхід кожної комірки пропорційної, інтегральної і диференційної, і в залежності від нього змінюються коефіцієнти настроювання кожної комірки. Це забезпечить оптимальні значення коефіцієнтів настроювання кожної комірки на кожному режимі роботи об'єкта регулювання, зменшить динамічну похибку регулювання і підвищить ефективність роботи об'єкта регулювання. Поставлена задача вирішується тим, що у пропорційно-інтегрально-диференційному регуляторі, що містить пропорційну, інтегральну і диференційну комірки, на вхід яких подається вхідний сигнал, а виходи подаються на суматор, на виході якого формується сигнал виходу, згідно з корисною моделлю, застосовано комірку визначення знаку похідної, на вхід якої подається вхідний сигнал, а вихід подається на вхід кожної комірки - пропорційної, інтегральної і диференційної, і в залежності від нього змінюються коефіцієнти настроювання кожної комірки. Суть корисної моделі пояснюється кресленням, де зображено пропорційно-інтегральнодиференційний регулятор, що містить пропорційну 1, інтегральну 2 і диференційну 3 комірки, на вхід яких подається вхідний сигнал, а виходи подаються на суматор 4, на виході якого формується сигнал виходу регулятора Рр, а також комірка 5 визначення знаку похідної, на вхід якої подається вхідний сигнал Рвх, а вихід подається на вхід кожної комірки - пропорційної 1, інтегральної 2 і диференційної 3, і в залежності від нього змінюються коефіцієнти настроювання кожної комірки. Пристрій працює наступним чином. Якщо сигнал входу Рвх не змінюється, тобто похідна дорівнюється нулю, на виході комірки 5 визначення знаку похідної сигнал дорівнюється нулю і коефіцієнти настроювання регулятора не змінюються. При зростанні або зменшенні вхідного сигналу Рвх на виході комірки 5 визначення знаку похідної формується сигнал Ру, який надходить на вхід пропорційної 1, інтегральної 3 і диференційної 4 комірок, змінюючи їх коефіцієнти настроювання. Таким чином забезпечується оптимальне значення коефіцієнтів настроювання регулятора, що зменшує динамічну похибку регулювання і підвищує ефективність роботи об'єкта. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 Пропорційно-інтегрально-диференційний регулятор, що містить пропорційну, інтегральну і диференційну комірки, на вхід яких подається вхідний сигнал, а виходи подаються на суматор, на виході якого формується сигнал виходу, який відрізняється тим, що застосовується комірка визначення знаку похідної, на вхід якої подається вхідний сигнал, а вихід подається на вхід кожної комірки - пропорційної, інтегральної і диференційної, і в залежності від нього змінюються коефіцієнти настроювання кожної комірки. 50 1 UA 88408 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюHusientsova Yana Alimivna, Kovalenko Alim Oleksiiovych
Автори російськоюГусенцова Яна Алимовна, Коваленко Алим Алексеевич
МПК / Мітки
Мітки: пропорційно-інтегрально-диференційний, регулятор
Код посилання
<a href="https://ua.patents.su/4-88408-proporcijjno-integralno-diferencijjnijj-regulyator.html" target="_blank" rel="follow" title="База патентів України">Пропорційно-інтегрально-диференційний регулятор</a>
Пропорційно-інтегрально-диференційний регулятор
Номер патенту: 7964
Опубліковано: 15.07.2005
Автори: Адамчо Яна Володимирівна, Подлєсна Світлана Василівна, Баранич Юлія Вікторівна, Кондауров Євген Миколайович, Андрійчук Костянтин Миколайович, Коваленко Алім Олексійович, Гусенцова Яна Алімівна
МПК: H05K 10/00
Мітки: регулятор, пропорційно-інтегрально-диференційний
Формула / Реферат:
Пропорційно-інтегрально-диференційний регулятор, що містить пропорційну, інтегруючу, диференційну ланки та суматор, який відрізняється тим, що він оснащений пневматичним елементом нечіткої логіки.
Пропорційно-інтегрально-диференційний регулятор з додатковою керуючою дією
Номер патенту: 104330
Опубліковано: 27.01.2014
Автори: Довгополий Ярослав Олександрович, Блонський Степан Денисович
МПК: G05B 11/00
Мітки: пропорційно-інтегрально-диференційний, регулятор, додатковою, дією, керуючою
Формула / Реферат:
Пропорційно-інтегрально-диференційний регулятор з додатковою керуючою дією, який включає блок порівняння, функціональні блоки пропорційного, інтегрального та диференційного перетворювання з відповідними пристроями для їх настройки, перший та другий суматори, при цьому вихід першого суматора з'єднаний з входом другого суматора, також регулятор додатково містить другий блок диференціювання, вихід якого з'єднаний з входом другого суматора, а...
Пропорційно-інтегрально-диференційний регулятор з додатковою керуючою дією
Номер патенту: 104016
Опубліковано: 25.12.2013
Автори: Блонський Степан Денисович, Мінакова Наталія Олександрівна, Петрова Наталія Сергіївна
МПК: G05B 11/48
Мітки: додатковою, регулятор, пропорційно-інтегрально-диференційний, керуючою, дією
Формула / Реферат:
Пропорційно-інтегрально-диференційний регулятор з додатковою керуючою дією, який включає блок порівняння, функціональні блоки пропорційного, інтегрального та диференційного перетворювання з відповідними пристроями для їх настройки, виходи яких з'єднані з трьома входами першого суматора, вихід якого з'єднано з входом другого суматора, при цьому він додатково містить другий блок диференціювання, вихід якого з'єднано з другим входом другого...
Пропорційно-інтегрально-диференційний регулятор з додатковою керуючою дією
Номер патенту: 95197
Опубліковано: 11.07.2011
Автори: Петрова Наталія Сергіївна, Блонський Степан Денисович, Шуть Олександр Феліксович
МПК: G05B 11/36
Мітки: керуючою, дією, регулятор, додатковою, пропорційно-інтегрально-диференційний
Формула / Реферат:
Пропорційно-інтегрально-диференційний регулятор, який включає блок порівняння, функціональні блоки пропорційного, інтегрального та диференційного перетворювання з відповідними пристроями для їх настройки, при цьому виходи цих функціональних блоків з'єднані з трьома входами першого суматора, вихід якого з'єднано з входом другого суматора, який відрізняється тим, що він додатково містить другий блок диференціювання, вхід якого з'єднаний з...
Пропорціонально-інтегрально-диференціальний регулятор з додатковою керуючою дією
Номер патенту: 101992
Опубліковано: 27.05.2013
Автори: Блонський Степан Денисович, Петрова Наталія Сергіївна
МПК: G05B 11/36
Мітки: пропорціонально-інтегрально-диференціальний, регулятор, додатковою, керуючою, дією
Формула / Реферат:
Пропорціонально-інтегрально-диференціальний регулятор з додатковою керуючою дією, що містить блок порівняння, який з'єднаний з функціональними блоками пропорціонального, диференціального та інтегрального перетворювання з відповідними пристроями для їх настройки, а також перший та другий суматори, при цьому вихід блока інтегрального перетворювання з'єднаний з першим входом другого суматора, який відрізняється тим, що в нього додатково...
Попередній патент: Спосіб комплексної діагностики та терапії захворювання молочної залози
Наступний патент: Спосіб отримання порошку міді з відходів кабельно-провідникової продукції
Випадковий патент: Спосіб отримання пектиновмісних напоїв з плодово-ягідної і овочевої сировини