Пропорційно-інтегрально-диференційний регулятор з додатковою керуючою дією
Номер патенту: 104016
Опубліковано: 25.12.2013
Автори: Петрова Наталія Сергіївна, Блонський Степан Денисович, Мінакова Наталія Олександрівна
Формула / Реферат
Пропорційно-інтегрально-диференційний регулятор з додатковою керуючою дією, який включає блок порівняння, функціональні блоки пропорційного, інтегрального та диференційного перетворювання з відповідними пристроями для їх настройки, виходи яких з'єднані з трьома входами першого суматора, вихід якого з'єднано з входом другого суматора, при цьому він додатково містить другий блок диференціювання, вихід якого з'єднано з другим входом другого суматора, а вихід другого суматора є виходом цього регулятора, який відрізняється тим, що вхід другого блока диференціювання з'єднаний з виходом першого суматора.
Текст
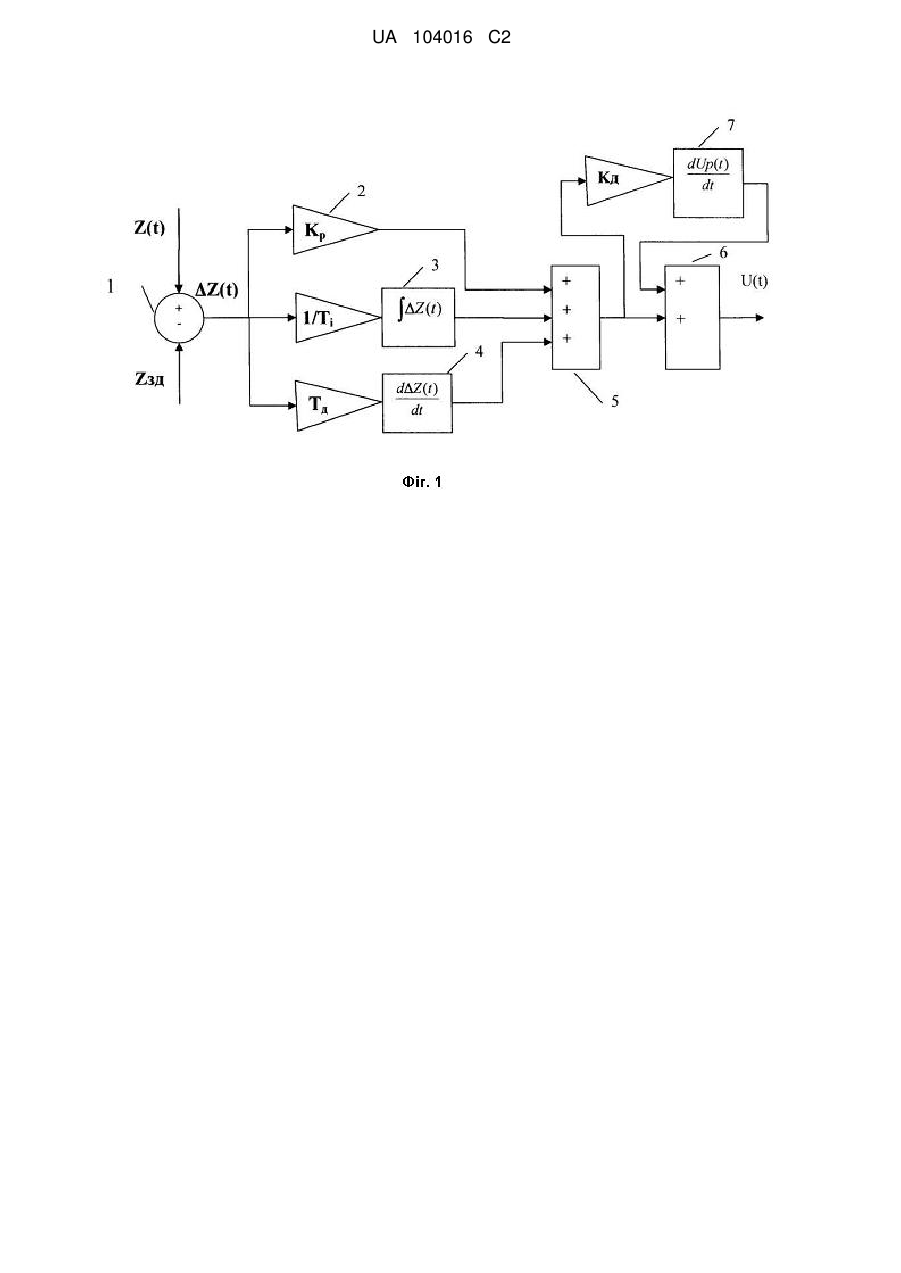
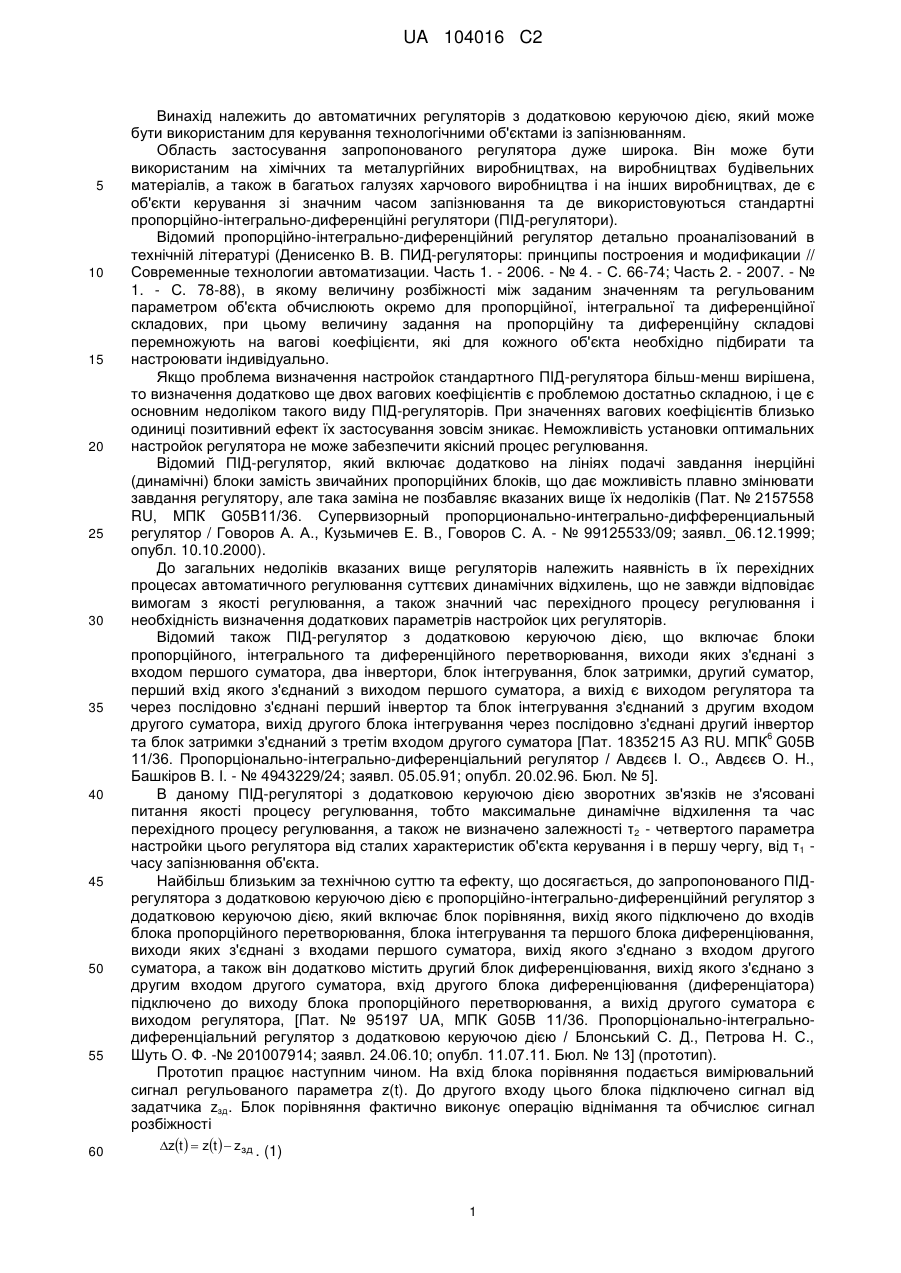
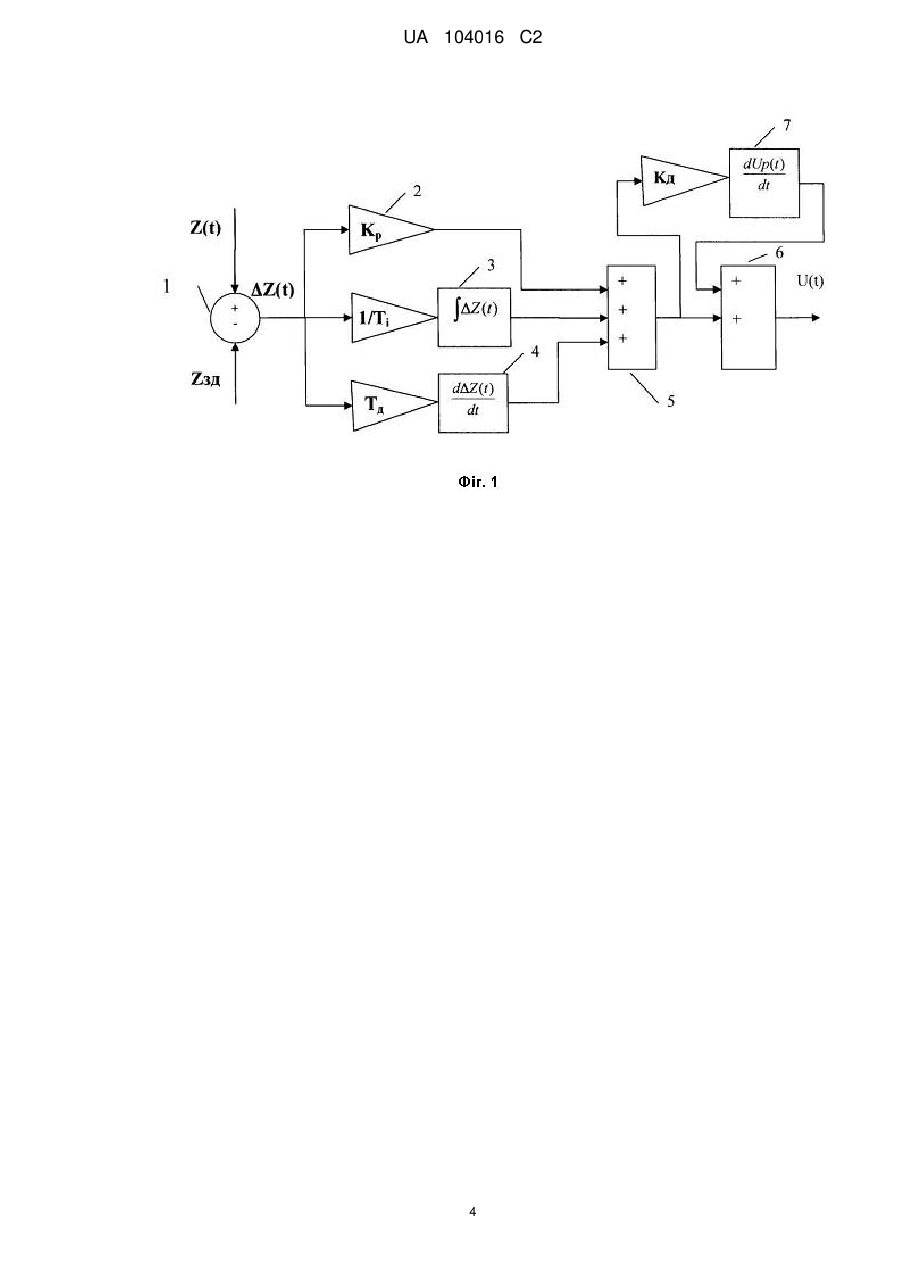
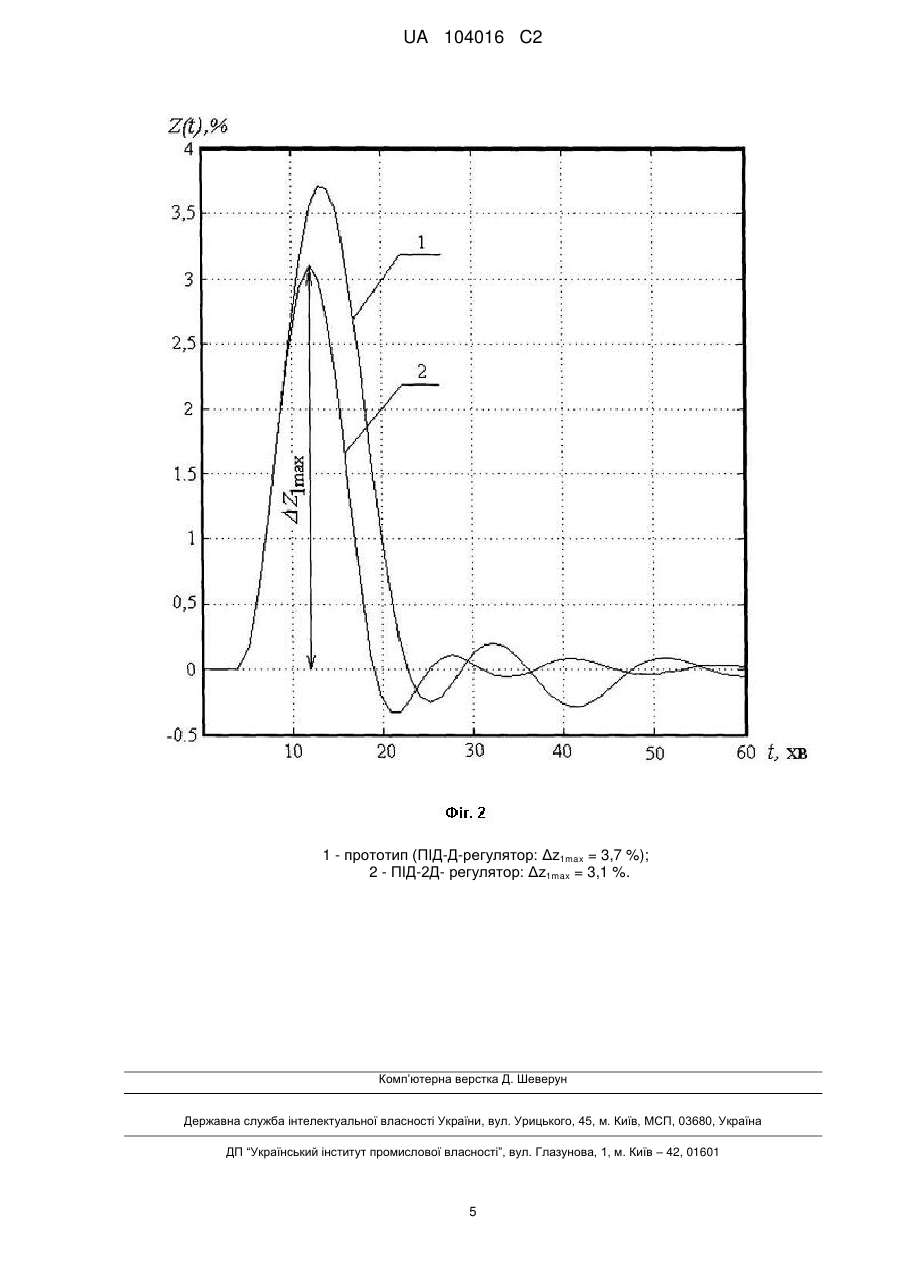
Реферат: Винахід належить до автоматичних регуляторів з додатковою керуючою дією, який може бути використаним для керування технологічними об'єктами із запізнюванням. Пропорційноінтегрально-диференційний регулятор з додатковою керуючою дією включає блок порівняння, функціональні блоки пропорційного, інтегрального та диференційного перетворювання з відповідними пристроями для їх настройки, виходи яких з'єднані з трьома входами першого суматора, вихід якого є першим входом другого суматора, а також додатково містить другий блок диференціювання, вихід якого з'єднано з другим входом другого суматора, а вихід другого суматора є виходом цього регулятора, і згідно з винаходом вхід другого блока диференціювання з'єднаний з виходом першого суматора. За допомогою запропонованого винаходу досягається зменшення величини максимального динамічного відхилення в перехідних режимах автоматичних систем регулювання та підвищення запасу усталеності цих систем за рахунок додаткової керуючої дії диференціатора, а також спрощення структури регулятора. UA 104016 C2 (12) UA 104016 C2 UA 104016 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до автоматичних регуляторів з додатковою керуючою дією, який може бути використаним для керування технологічними об'єктами із запізнюванням. Область застосування запропонованого регулятора дуже широка. Він може бути використаним на хімічних та металургійних виробництвах, на виробництвах будівельних матеріалів, а також в багатьох галузях харчового виробництва і на інших виробництвах, де є об'єкти керування зі значним часом запізнювання та де використовуються стандартні пропорційно-інтегрально-диференційні регулятори (ПІД-регулятори). Відомий пропорційно-інтегрально-диференційний регулятор детально проаналізований в технічній літературі (Денисенко В. В. ПИД-регуляторы: принципы построения и модификации // Современные технологии автоматизации. Часть 1. - 2006. - № 4. - С. 66-74; Часть 2. - 2007. - № 1. - С. 78-88), в якому величину розбіжності між заданим значенням та регульованим параметром об'єкта обчислюють окремо для пропорційної, інтегральної та диференційної складових, при цьому величину задання на пропорційну та диференційну складові перемножують на вагові коефіцієнти, які для кожного об'єкта необхідно підбирати та настроювати індивідуально. Якщо проблема визначення настройок стандартного ПІД-регулятора більш-менш вирішена, то визначення додатково ще двох вагових коефіцієнтів є проблемою достатньо складною, і це є основним недоліком такого виду ПІД-регуляторів. При значеннях вагових коефіцієнтів близько одиниці позитивний ефект їх застосування зовсім зникає. Неможливість установки оптимальних настройок регулятора не може забезпечити якісний процес регулювання. Відомий ПІД-регулятор, який включає додатково на лініях подачі завдання інерційні (динамічні) блоки замість звичайних пропорційних блоків, що дає можливість плавно змінювати завдання регулятору, але така заміна не позбавляє вказаних вище їх недоліків (Пат. № 2157558 RU, МПК G05B11/36. Супервизорный пропорционально-интегрально-дифференциальный регулятор / Говоров Α. Α., Кузьмичев Е. В., Говоров С. А. - № 99125533/09; заявл._06.12.1999; опубл. 10.10.2000). До загальних недоліків вказаних вище регуляторів належить наявність в їх перехідних процесах автоматичного регулювання суттєвих динамічних відхилень, що не завжди відповідає вимогам з якості регулювання, а також значний час перехідного процесу регулювання і необхідність визначення додаткових параметрів настройок цих регуляторів. Відомий також ПІД-регулятор з додатковою керуючою дією, що включає блоки пропорційного, інтегрального та диференційного перетворювання, виходи яких з'єднані з входом першого суматора, два інвертори, блок інтегрування, блок затримки, другий суматор, перший вхід якого з'єднаний з виходом першого суматора, а вихід є виходом регулятора та через послідовно з'єднані перший інвертор та блок інтегрування з'єднаний з другим входом другого суматора, вихід другого блока інтегрування через послідовно з'єднані другий інвертор 6 та блок затримки з'єднаний з третім входом другого суматора [Пат. 1835215 A3 RU. МПК G05В 11/36. Пропорціонально-інтегрально-диференціальний регулятор / Авдєєв І. О., Авдєєв О. Н., Башкіров В. І. - № 4943229/24; заявл. 05.05.91; опубл. 20.02.96. Бюл. № 5]. В даному ПІД-регуляторі з додатковою керуючою дією зворотних зв'язків не з'ясовані питання якості процесу регулювання, тобто максимальне динамічне відхилення та час перехідного процесу регулювання, а також не визначено залежності τ 2 - четвертого параметра настройки цього регулятора від сталих характеристик об'єкта керування і в першу чергу, від τ 1 часу запізнювання об'єкта. Найбільш близьким за технічною суттю та ефекту, що досягається, до запропонованого ПІДрегулятора з додатковою керуючою дією є пропорційно-інтегрально-диференційний регулятор з додатковою керуючою дією, який включає блок порівняння, вихід якого підключено до входів блока пропорційного перетворювання, блока інтегрування та першого блока диференціювання, виходи яких з'єднані з входами першого суматора, вихід якого з'єднано з входом другого суматора, а також він додатково містить другий блок диференціювання, вихід якого з'єднано з другим входом другого суматора, вхід другого блока диференціювання (диференціатора) підключено до виходу блока пропорційного перетворювання, а вихід другого суматора є виходом регулятора, [Пат. № 95197 UA, МПК G05В 11/36. Пропорціонально-інтегральнодиференціальний регулятор з додатковою керуючою дією / Блонський С. Д., Петрова Н. С., Шуть О. Ф. -№ 201007914; заявл. 24.06.10; опубл. 11.07.11. Бюл. № 13] (прототип). Прототип працює наступним чином. На вхід блока порівняння подається вимірювальний сигнал регульованого параметра z(t). До другого входу цього блока підключено сигнал від задатчика zзд. Блок порівняння фактично виконує операцію віднімання та обчислює сигнал розбіжності zt zt zзд . (1) 1 UA 104016 C2 5 10 15 20 25 30 35 40 45 50 Входом пропорційно-інтегрально-диференційного регулятора є сигнал розбіжності Δz(t), який подається на входи блоків пропорційного, інтегрального та диференційного перетворювань. Вихідні сигнали цих блоків підсумовуються у першому суматорі, вихід якого є сигналом керування стандартного ПІД-регулятора. Цей вихідний сигнал подається на один із входів другого суматора, а на інший вхід цього суматора подається додатковий керуючий сигнал від другого блока диференційного перетворювання, який диференціює вихідний сигнал блоку пропорційного перетворювання. Вихідний сигнал другого суматора є керуючим сигналом U(t) цього регулятора. Передавальна функція такого регулятора має вид: Ws K p де Kд - час диференціювання другого диференціатора - четвертий параметр настройки цього регулятора. Даний прототип має деякі недоліки, і зокрема, це значне максимальне динамічне відхилення та дещо більший час перехідного процесу регулювання, а також у відповідності з його передавальною функцією два паралельно діючих диференціатори можна замінити одним, якщо на ньому є можливість встановити їх сумарний час диференціювання. Тут доречно зауважити, що на пневматичних блоках диференціювання передбачено встановлення максимального часу диференціювання Тд=10 хв., що не завжди є достатнім. Задачею винаходу є удосконалення ПІД-регулятора з метою зменшення величини максимального динамічного відхилення в перехідних режимах автоматичних систем регулювання та підвищення запасу усталеності цих систем за рахунок додаткової керуючої дії диференціатора, а також суттєве зменшення часу перехідного процесу регулювання. Поставлена задача досягається тим, що відомий пропорційно-інтегрально-диференційний регулятор з додатковою керуючою дією, який включає блок порівняння, вихід якого підключено до входів блока пропорційного перетворювання, блока інтегрування та першого блока диференціювання, виходи яких з'єднані з входами першого суматора, вихід якого з'єднано з входом другого суматора, при цьому він додатково містить другий блок диференціювання, вихід якого з'єднано з другим входом другого суматора, а вихід цього суматора є виходом регулятора, і відповідно до винаходу вхід другого блока диференціювання (диференціатора) підключено до виходу першого суматора. Функціональна схема пропорційно-інтегрально-диференційного регулятора з додатковою керуючою дією диференціатора представлена на фіг. 1. Він включає блок порівняння 1, вихід якого з'єднано з блоком пропорційного перетворювання 2, блоком інтегрування 3 та першим блоком диференціювання 4, виходи котрих підключені відповідно до трьох входів першого суматора 5, а його вихід підключено до одного з входів другого суматора 6, вихід якого є загальним виходом цього регулятора. До другого входу суматора 6 підключено вихід другого блока диференціювання 7, вхід якого згідно з винаходом з'єднано з виходом першого суматора 5. Запропонований ПІД-регулятор з додатковою керуючою дією диференціатора працює наступним чином. На вхід блока порівняння 1 подається вимірювальний сигнал регульованого параметра z(t). До другого входу цього блока підключено сигнал від за датчика zзд. Блок порівняння виконує операцію віднімання та обчислює сигнал розбіжності Δz(t) у відповідності з рівнянням (1). Входом пропорційно-інтегрально-диференційного регулятора є сигнал розбіжності Δz(t), який подається на входи блоків пропорційного перетворювання 2, інтегрування 3 та диференціювання 4. Вихідні сигнали цих блоків підсумовуються у першому суматорі 5, вихід якого є сигналом керування стандартного ПІД-регулятора. Цей вихідний сигнал подається на один із входів другого суматора 6. На інший вхід суматора 6 подається додатковий керуючий сигнал від другого диференціатора 7, який диференціює вихідний сигнал першого суматора 5. Вихідний сигнал другого суматора 6 є керуючим сигналом U(t) цього регулятора. Передавальна функція такого регулятора має вид: Ws Kp 55 1 Tд s K p K д s Ti s , (2) 1 1 Tд s Kp K д s Kp Tд s K д s Ti s Ti s , (3) де Kд - час диференціювання другого диференціатора - четвертий параметр настройки цього регулятора. Після проведення відповідних перетворювань в кінцевому результаті отримаємо передавальну функцію: 2 UA 104016 C2 Ws Kp 5 10 20 25 30 35 40 45 Ti 1 Tд Kp K д s Tд K д s2 Ti s . (4) Виходячи з закону регулювання (4), цей регулятор можна назвати «пропорційноінтегрально-диференційний з додатковою керуючою дією за другою похідною» або скорочено ПІД-2Д-регулятор. Запропонований регулятор може бути побудований з пневматичних елементів та блоків, а також реалізований у вигляді алгоритму керування, який відповідає його закону регулювання у мікропроцесорних контролерах. Для виявлення позитивних характеристик запропонованого ПІД-регулятора з додатковою керуючою дією за другою похідною в пакеті прикладних програм на ПЕОМ було проведено порівняльні моделювання автоматичних систем регулювання технологічного об'єкта з запізнюванням з використанням різних видів регуляторів. Як об'єкт керування використано теплообмінний апарат з передавальною функцією по каналу регулювання: Ws 15 Kд 12 e4s , 4 s 1 10 s 1 . (5) На основі математичної моделі динаміки цього об'єкта керування на ПЕОМ були побудовані структурні схеми систем автоматичного регулювання з використанням ПІД-регулятора з додатковою керуючою дією згідно з описом прототипу та запропонованого нами ПІД-2Дрегулятора. На фіг. 2 представлені перехідні процеси регулювання для найбільш оптимальних значень параметрів настройки цих регуляторів. Максимальне динамічне відхилення Δz1max, що є основним показником якості автоматичного регулювання, у випадках використання відповідно ПІД-Д-регулятора (прототип) та запропонованого ПІД-2Д-регулятора становить 3,7 % та 3,1 % при нанесенні на об'єкт ступеневої збурюючої дії величиною 10 %, тобто зменшення максимального динамічного відхилення регульованого параметра від завданого значення складає 16,2 % в порівнянні з прототипом. Час перехідного процесу регулювання для прототипу складає 55 хв., а запропонований ПІД2Д-регулятор дає відповідно 30 хв., що менше на 45,4 %. Отже, із проведеного порівняльного моделювання маємо висновок, що найкращу якість автоматичного регулювання дає ПІД-2Д регулятор, який заявляється, тобто цей регулятор дає найменше максимальне динамічне відхилення Δz1max в порівнянні з прототипом, а також мінімальний час перехідного процесу регулювання. Оскільки запропонований ПІД-2Д регулятор дає мінімальне динамічне відхилення та мінімальний час перехідного процесу, то з метою покращення якості процесу регулювання можна запропонувати у випадках використання ПІД-регулятора замінити останній запропонованим винаходом. Промислова придатність запропонованого регулятора дуже широка. Він може бути використаним на хімічних та металургійних виробництвах, на виробництвах будівельних матеріалів, а також в багатьох галузях харчового виробництва і на інших виробництвах, де є об'єкти керування зі значним часом запізнювання та де використовуються стандартні ПІДрегулятори. ФОРМУЛА ВИНАХОДУ Пропорційно-інтегрально-диференційний регулятор з додатковою керуючою дією, який включає блок порівняння, функціональні блоки пропорційного, інтегрального та диференційного перетворювання з відповідними пристроями для їх настройки, виходи яких з'єднані з трьома входами першого суматора, вихід якого з'єднано з входом другого суматора, при цьому він додатково містить другий блок диференціювання, вихід якого з'єднано з другим входом другого суматора, а вихід другого суматора є виходом цього регулятора, який відрізняється тим, що вхід другого блока диференціювання з'єднаний з виходом першого суматора. 3 UA 104016 C2 4 UA 104016 C2 1 - прототип (ПІД-Д-регулятор: Δz1max = 3,7 %); 2 - ПІД-2Д- регулятор: Δz1max = 3,1 %. Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюPetrova Nataliia Serhiivna, Blonskyi Stepan Denysovych, Minakova Nataliia Oleksandrivna
Автори російськоюПетрова Наталия Сергеевна, Блонский Степан Денисович, Минакова Наталья Александровна
МПК / Мітки
МПК: G05B 11/48
Мітки: пропорційно-інтегрально-диференційний, дією, керуючою, додатковою, регулятор
Код посилання
<a href="https://ua.patents.su/7-104016-proporcijjno-integralno-diferencijjnijj-regulyator-z-dodatkovoyu-keruyuchoyu-diehyu.html" target="_blank" rel="follow" title="База патентів України">Пропорційно-інтегрально-диференційний регулятор з додатковою керуючою дією</a>
Пропорційно-інтегрально-диференційний регулятор з додатковою керуючою дією
Номер патенту: 95197
Опубліковано: 11.07.2011
Автори: Блонський Степан Денисович, Петрова Наталія Сергіївна, Шуть Олександр Феліксович
МПК: G05B 11/36
Мітки: дією, пропорційно-інтегрально-диференційний, регулятор, керуючою, додатковою
Формула / Реферат:
Пропорційно-інтегрально-диференційний регулятор, який включає блок порівняння, функціональні блоки пропорційного, інтегрального та диференційного перетворювання з відповідними пристроями для їх настройки, при цьому виходи цих функціональних блоків з'єднані з трьома входами першого суматора, вихід якого з'єднано з входом другого суматора, який відрізняється тим, що він додатково містить другий блок диференціювання, вхід якого з'єднаний з...
Пропорціонально-інтегрально-диференціальний регулятор з додатковою керуючою дією
Номер патенту: 99037
Опубліковано: 10.07.2012
Автори: Петрова Наталія Сергіївна, Блонський Степан Денисович, Швачка Олександр Іванович
МПК: G05B 11/36, G05B 11/48
Мітки: регулятор, керуючою, додатковою, дією, пропорціонально-інтегрально-диференціальний
Формула / Реферат:
Пропорціонально-інтергально-диференціальний регулятор з додатковою керуючою дією, який включає блок порівняння, функціональні блоки пропорционального, інтегрального та першого блоку диференціального перетворювання з відповідними пристроями для їх настройки, при цьому виходи блоків з'єднані з трьома входами першого суматора, вихід якого з'єднано з першим входом другого суматора, а також з входом першого інвертору, а вихід цього інвертору...
Пропорціонально-інтегрально-диференціальний регулятор з додатковою керуючою дією
Номер патенту: 101992
Опубліковано: 27.05.2013
Автори: Блонський Степан Денисович, Петрова Наталія Сергіївна
МПК: G05B 11/36
Мітки: регулятор, додатковою, керуючою, дією, пропорціонально-інтегрально-диференціальний
Формула / Реферат:
Пропорціонально-інтегрально-диференціальний регулятор з додатковою керуючою дією, що містить блок порівняння, який з'єднаний з функціональними блоками пропорціонального, диференціального та інтегрального перетворювання з відповідними пристроями для їх настройки, а також перший та другий суматори, при цьому вихід блока інтегрального перетворювання з'єднаний з першим входом другого суматора, який відрізняється тим, що в нього додатково...
Пропорційно-інтегрально-диференційний регулятор
Номер патенту: 7964
Опубліковано: 15.07.2005
Автори: Подлєсна Світлана Василівна, Андрійчук Костянтин Миколайович, Адамчо Яна Володимирівна, Кондауров Євген Миколайович, Гусенцова Яна Алімівна, Баранич Юлія Вікторівна, Коваленко Алім Олексійович
МПК: H05K 10/00
Мітки: регулятор, пропорційно-інтегрально-диференційний
Формула / Реферат:
Пропорційно-інтегрально-диференційний регулятор, що містить пропорційну, інтегруючу, диференційну ланки та суматор, який відрізняється тим, що він оснащений пневматичним елементом нечіткої логіки.
Цифровий регулятор
Номер патенту: 65784
Опубліковано: 15.04.2004
Автор: Гостєв Володимир Іванович
МПК: H03L 5/00
Формула / Реферат:
1. Цифровий регулятор, що містить з'єднані блок фіксатора помилки і блок вибірки, який відрізняється тим, що він додатково містить блоки формування сигналів m0, m1, m2, і блок виміру швидкості сигналу, перший та другий виходи якого з'єднані відповідно з другими та третіми входами блоків формування сигналів m0, m1, m2, вихід блока фіксатора помилки з'єднаний з першим входом блока формування сигналу m0, другий вихід блока формування сигналу та...
Попередній патент: Інфраструктура з контрольованою проникністю і спосіб одержання вуглеводнів з вуглеводневмісних матеріалів
Наступний патент: Сполука піридазинону і її застосування
Випадковий патент: Спосіб лікування неускладненої виразкової хвороби шлунка та дванадцятипалої кишки гомеопатичними засобами