Спосіб регулювання збудження синхронного генератора
Номер патенту: 89605
Опубліковано: 10.02.2010
Формула / Реферат
Спосіб регулювання збудження синхронного генератора (СГ) шляхом двоконтурної схеми підпорядкованого регулювання, що містить коригувальні ланцюги для стабілізації динамічних характеристик перехідного процесу зміни вихідної напруги СГ, який відрізняється тим, що в кожний контур уводять регулятор інтегрального типу, регулятор ковзного режиму й фазі-регулятор, причому в підпорядкованому контурі регулятори стабілізують величину постійної часу графіка перехідного процесу зміни вихідної напруги СГ, у головному - стабілізують величину сталого значення графіка, а спільною роботою цих контурів формують графік зміни вихідної напруги СГ у перехідних процесах, що відповідає, наприклад, аперіодичній ланці першого порядку, а фазі-регулятором корегують роботу регуляторів ковзного режиму.
Текст
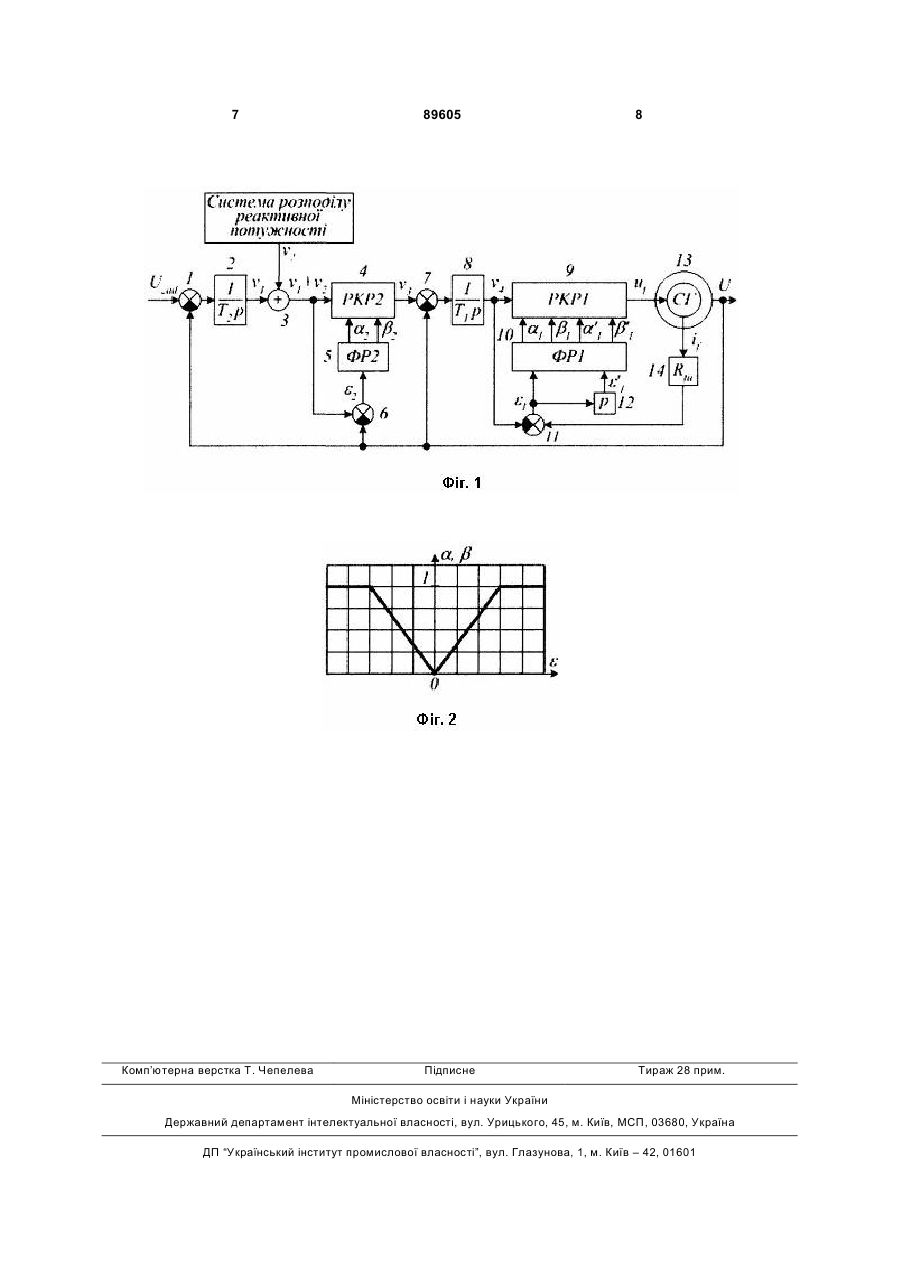
Спосіб регулювання збудження синхронного генератора (СГ) шляхом двоконтурної схеми підпорядкованого регулювання, що містить коригувальні ланцюги для стабілізації динамічних характеристик перехідного процесу зміни вихідної напруги СГ, який відрізняється тим, що в кожний контур уводять регулятор інтегрального типу, регулятор ковзного режиму й фазі-регулятор, причому в підпорядкованому контурі регулятори стабілізують величину постійної часу графіка перехідного процесу зміни вихідної напруги СГ, у головному - стабілізують величину сталого значення графіка, а спільною роботою цих контурів формують графік зміни вихідної напруги СГ у перехідних процесах, що відповідає, наприклад, аперіодичній ланці першого порядку, а фазі-регулятором корегують роботу регуляторів ковзного режиму. Винахід відноситься до автоматичних регуляторів збудження синхронних генераторів (СГ), які працюють паралельно на електричну мережу й характеризуються зміною параметрів СГ, їхніх приводних двигунів і взаємним впливом СГ по активній і реактивній потужностях. Винахід може бути також використаний для управління СГ і генератором відбору потужності (валогенератором ВГ) судна або корабля в штормових умовах плавання, коли частота обертання валу приводного двигуна СГ непостійна і коливається із частотою хитавиці судна. Відомі способи регулювання збудження СГ [1, 2], засновані на застосуванні регуляторів ковзного режиму, які здатні забезпечити усталену роботу СГ, що працюють паралельно на мережу, без переналагодження параметрів регуляторів і коригувальних пристроїв при значних змінах режимів роботи електромережі. У зазначених публікаціях система регулювання напруги збудження СГ синтезована при умовах, що СГ працюють автономно на мережу нескінченної потужності й з'єднані з мережею довгими лініями електропередачі, а між СГ відсутній обмін зрівняльними реактивними струмами. Недоліком зазначених систем збудження є те, що вони не придатні для автоматизації генераторних агрегатів, що містять СГ, які працюють на мережу обмеженої потужності і з'єднані між собою короткими лініями електропередачі. У цьому випадку робота СГ не є автономною й на роботу окремих генераторних агрегатів впливають зрівняльні реактивні струми, які перетікають між паралельно працюючими СГ. Тому, ці способи регулювання збудження не можуть бути застосовані в автономних суднових (корабельних) електростанціях, де СГ, що паралельно працюють, становлять електричну систему з обмеженою потужністю й об'єднані в електричну мережу короткими лініями електропередачі. Найбільш близьким до пропонованого рішення є спосіб регулювання збудження синхронного генератора [3, 4] (прототип), реалізований за двоконтурною схемою підлеглого регулювання зі штатними регуляторами, у яку додатково уведені (19) UA (11) 89605 (13) (21) a200908167 (22) 03.08.2009 (24) 10.02.2010 (46) 10.02.2010, Бюл.№ 3, 2010 р. (72) ДВОРАК ВАСИЛЬ МИКОЛАЙОВИЧ, ДВОРАК МИКОЛА МАРКОВИЧ (73) ДВОРАК ВАСИЛЬ МИКОЛАЙОВИЧ, ДВОРАК МИКОЛА МАРКОВИЧ (56) JP 61161999 A, 22.07.1986 JP 58182499 A, 25.10.1983 SU 1156236 A, 15.05.1985 US 3996507 A, 07.12.1976 Бобко В.Д., Золотухин Ю.Н. НестеровА.А. Нечеткая реализация скользящих режимов в системе возбуждения синхронного генератора // Труды Междунар. конф. "Проблемы управления и моделирования в сложных системах" (Самара, 15-17 июня 1999), Самара: Изд. Самарский научный центр РАН", 1999. - С.229-234. Панкратов С.А. Результаты физического моделирования параллельной работы ВГ при нестабиль C2 1 3 ланцюги від'ємного зворотного зв'язку з коригувальними ланками в кожній. За допомогою зазначених коригувальних ланок реалізується такий алгоритм перетворень сигналів у системі керування збудження СГ, при якому забезпечується в заданих умовах експлуатації генераторів однакові постійні часу перехідного процесу напруги на всіх паралельно працюючих генераторах [3, с.196]. В [4] приводяться результати практичного підтвердження ефективності такого способу регулювання збудження паралельно працюючих СГ автономної суднової електростанції. Однак, при зміні умов експлуатації, що виражається в зміні параметрів СГ, їхніх приводних двигунів, параметрів навантаження електромережі й величин зрівняльних реактивних струмів потрібні зміни алгоритмів перетворень сигналів коригувальними ланками. У запропонованому способі й реалізуючому його пристрої відсутня можливість автоматичної зміни один раз обраного алгоритму перетворення сигналів, тому що залишаються незмінними схеми коригувальних ланок і параметри їхніх елементів: опору резисторів, ємності конденсаторів і т. і. Звідси, недоліком способу й реалізуючого його пристроїв є відсутність у ньому властивості робастності, яка полягає в тім, що при зміні параметрів СГ, їхніх приводних двигунів, параметрів навантаження електромережі й величин зрівняльних реактивних струмів при незмінних параметрах коригувальних ланок виникає неконтрольована розбіжність зазначених вище постійних часу перехідних процесів генераторних агрегатів. Також не стабілізується при зазначених змінах параметрів і дії зрівняльних струмів стале значення графіка перехідного процесу й не враховується коригувальний сигнал, що надходить у систему збудження СГ із системи розподілу реактивної потужності. Це приводить у перехідних процесах до посилення взаємного впливу генераторів по силовому ланцюзі й приводить до втрати стійкості їхньої паралельної роботи на загальну електричну мережу. Задача винаходу - забезпечення робастності роботи системи збудження СГ, яка полягає в тім, що при зміні параметрів СГ, їхніх приводних двигунів, параметрів навантаження електромережі й величин зрівняльних реактивних струмів забезпечується стабільність параметрів графіка перехідного процесу зміни вихідної напруги СГ. Параметрами графіка є постійні часу й стале значення. Поставлена задача досягається тим, що регулювання збудження синхронного генератора ведуть шляхом двоконтурної схеми підлеглого регулювання напруги СГ, у кожний контур уводять регулятор інтегрального типу, регулятор ковзного режиму й фаззі-регулятор, причому в підлеглому контурі регулятори стабілізують величину постійної часу графіка перехідного процесу зміни вихідної напруги СГ, у головному - стабілізують величину сталого значення графіка, а спільною роботою цих контурів формують графік зміни вихідної напруги СГ у перехідних процесах відповідний, на 89605 4 приклад, аперіодичній ланці першого порядку, а фаззі-регулятором корегують роботу регуляторів ковзного режиму. Сутність винаходу пояснюється малюнками, де: Фіг.1 - функціональна схема перетворення сигналів регулювання збудження СГ, що працює в електромережі паралельно з іншими СГ; Фіг.2 - графік функції приналежності фаззірегулятора. Внутрішній, підлеглий контур містить послідовно з'єднані інтегральний регулятор (І-регулятор) 8 зі сталою часу Т1, перший регулятор ковзного режиму РКР1 9, обмотку збудження синхронного генератора СГ 13, від'ємний зворотний зв'язок по вихідній напрузі СГ, що надходить на елемент непогодження 7, вихід якого з'єднаний із входом Ірегулятора 8. Зовнішній, головний контур містить послідовно з'єднані І-регулятор 2 зі сталою часу Т2, суматор 3, на другий вхід якого надходить сигнал корекції з контуру реактивної потужності, другий регулятор ковзного режиму РКР2 4, вихідний сигнал якого є сигналом завдання для підлеглого контуру, від'ємний зворотний зв'язок по вихідній напрузі СГ, що надходить на елемент непогодження 1, вихід якого з'єднаний із входом Ірегулятора 2. На входи із другого по п'ятий першого регулятора ковзного режиму РКР1 надходять сигнали зі фаззі-регулятора ФР1 10, для якого вхідними є вихідні з елемента непогодження 11 сигнал динамічної помилки регулювання струму збудження СГ і похідна цієї помилки, що формується диференціатором 12, причому на прямий вхід елемента непогодження 11 надходить сигнал струму збудження СГ, що множений на величину опору обмотки збудження СГ, а на інверсний вхід надходить сигнал з виходу І-регулятора 8. На другий і третій входи другого регулятора ковзного режиму РКР2 4 надходять сигнали зі фаззірегулятора ФР2 5, для якого вхідним є сигнал вихідний з елемента непогодження 6, причому на прямий вхід елемента 6 надходить сигнал із суматора 3, а на інверсний вхід надходить сигнал напруги СГ 13. Алгоритми перетворення сигналів наведені у вигляді аналітичних залежностей (формул). Сигнал uf формується першим регулятором ковзного режиму РКР1 відповідно до виразу uf = n 4 - e1y0 - e'1 y1, дe e 1 = n 4 - R fн i f , e '1 = de ; dt Rfн - номінальний опір обмотки збудження СГ; ìa , якщо if × e1 > 0, y0 = í 1 î b1 якщо if × e1 £ 0, ìa' , якщо i'f ×e'1 > 0, y1 = í 1 î b'1 якщо i' f ×e'1 £ 0, Параметри a1, b1, a1' i b1' формуються першим фаззі-регулятором ФР1 відповідно до графіків функцій приналежності (Фіг.2) за законами: 5 ì e1a1max × sign(a1max ), якщо e1 £ l a 0, ï ï a1 = í l a0 ï ïa1max , якщо e1 > l a0 , î ìeb ï 1 1min × sign(b1min ), якщо e1 £ l b0, ï b1 = í lb0 ï ïb1min, якщо e1 > lb0 , î ì e'1 a'1max × sign(a'1max ), якщо e'1 £ l a1, ï ï l a1 a'1 = í ï ïa '1max , якщо e'1 > l a1, î ì e' b' ï 1 1min × sign(b'1min ), якщо e'1 £ lb1, ï b'1 = í l b1 ï ïb'1min , якщо e'1 > lb1, î де a1max , b1min, a'1max i b'1min - параметри, що визначені відповідно за методикою проектування регуляторів ковзного режиму [5]; lb 0, l a0, lb1, l a1 - коефіцієнти, що підбираються з діапазону 0,03…0,15, і якими визначається ширина розтину графіка функції приналежності (Фіг.2) фаззі-регулятора. Сигнал n3 формується другим регулятором ковзного режиму РКР2 відповідно до виразу n 3 = n1 + n 2 - e 2y2 , де e 2 = n1 + n 2 - U ; ìa якщо U × e 2 > 0, y2 = í 2 îb2 якщо U × e2 £ 0. Параметри a 2,b2 формуються другим фаззірегулятором ФР2 відповідно до графіків функцій приналежності (Фіг.2) за законами: ì e2a 2 max × sign(a 2 max ), якщо e2 £ l a 2 , ï ï a 2 = í l a0 ï ïa 2 max , якщо e 2 > l a2 , î ìe b ï 2 2 min × sign(b2 min ), якщо e 2 £ lb2, ï b2 = í lb 2 ï ïb2 min, якщо e 2 > l b2 , î де a 2 max i b2 min - параметри, що визначені відповідно за методикою проектування регуляторів ковзного режиму [5]; l b2, la 2 - коефіцієнти, що підбираються з ді апазону 0,03-0,15, і якими визначається ширина розтину графіка функції приналежності (Фіг.2) фаззі-регулятора. Суть винаходу полягає в тому, що суспільною роботою підлеглого і основного контурів регулювання формується графік зміни вихідної напруги СГ у перехідних процесах, що відповідає аперіодичної ланці першого порядку із тією властивістю, що значення постійної часу і коефіцієнта передачі зазначеної ланки стабільні і не залежать від змін 89605 6 параметрів СГ, їхніх приводних двигунів і взаємного впливу СГ по активній і реактивній потужностях. При цьому, підлеглим контуром забезпечується стабільність постійної часу, а головним контуром забезпечується стабільність коефіцієнта передачі. Фаззі-регулятори, які входять в підлеглий і основний контури регулювання, корегують роботу регуляторів ковзного режиму таким чином, що із наближенням сигналів стану системи до сталих значень зменшуються амплітуди імпульсів регуляторів ковзного режиму. Головна відмінність пропонованого пристрою від прототипу полягає в тому, що введенням трьох регуляторів в двоконтурну систему регулювання збудження СГ досягається отримання заданих аперіодичних графіків перехідних процесів першого порядку для усіх паралельно працюючих СГ, причому постійні часу і сталі значення вказаних графіків є стабільними величинами при всіх можливих змінах параметрів СГ, параметрів їхніх приводних двигунів і взаємного впливу СГ по активній і реактивній потужностях через спільну електричну мережу і дії коригувального сигналу із системи автоматичного розподілу реактивної потужності між паралельно працюючими СГ. Цим забезпечена робастність запропонованого способу регулювання збудження СГ. При зміні типу бажаного графіка перехідного процесу вихідної напруги СГ повинні бути змінені алгоритми перетворення сигналів, тобто змінені аналітичні залежності у вищенаведених формулах. Винахід може бути використано для управління СГ і генератором відбору потужності (валогенератора - ВГ) судна або корабля в штормових умовах плавання, коли частота обертання валу приводного двигуна ВГ непостійна і коливається із частотою хитавиці судна. Джерела інформації: 1. Бобко В. Д., Золотухин Ю. Н., Нестеров А. А. Нечеткая реализация скользящих режимов в системе возбуждения синхронного генератора // Труды Междунар. конф. "Проблемы управления и моделирования в сложных системах" (Самара, 1517 июня 1999), Самара: Изд. "Самарский научный центр РАН", 1999. - С.229-234. 2. A. Soto-Cota, L. М. Fridman, A. G. Loukianov and J. M. Can. Edo "Variable structure control of synchronous generator - singularly perturbed analysis" // International Journal of Control. Vol.79, No.1, January 2006, p.1-13. 3. Богомолов B.C. Валогенераторные установки судов: Теория и эксплуатация. - Калининград: Издательско-полиграфическое объединение, 2008. - 208с. 4. Панкратов С.А. Результаты физического моделирования параллельной работы ВГ при нестабильности скорости вращения // Сб. науч. трудов "Электрооборудование судов и электроэнергетика". - Калининград: Изд. КГТУ, 2002. - С.50-60. 5. Уткин В.И. Скользящие режимы и их применение в системах с переменной структурой. - М.: Наука, 1974. - 272с. 7 Комп’ютерна верстка Т. Чепелева 89605 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of synchronous generator excitation
Автори англійськоюDvorak Vasyl Mykolaiovych, Dvorak Mykola Markovych
Назва патенту російськоюСпособ регулирования воздуждения синхронного генератора
Автори російськоюДворак Василий Николаевич, Дворак Николай Маркович
МПК / Мітки
МПК: H02P 9/10
Мітки: регулювання, збудження, спосіб, генератора, синхронного
Код посилання
<a href="https://ua.patents.su/4-89605-sposib-regulyuvannya-zbudzhennya-sinkhronnogo-generatora.html" target="_blank" rel="follow" title="База патентів України">Спосіб регулювання збудження синхронного генератора</a>
Спосіб регулювання напруги синхронного генератора
Номер патенту: 64495
Опубліковано: 16.02.2004
Автори: Алаєв Віктор Васильович, Шоцький Олександр Миколайович
МПК: H03L 5/00
Мітки: регулювання, напруги, синхронного, спосіб, генератора
Формула / Реферат:
Спосіб регулювання напруги синхронного генератора шляхом виміру тимчасових інтервалів кожного такту пульсацій миттєвої випрямленої напруги синхронного генератора по лінії порівняння з заданою опорною напругою і подачею по цих тимчасових інтервалах на обмотку збудження імпульсів напруги живлення, який відрізняється тим, що вимірюють cos синхронного генератора і коректують...
Спосіб регулювання напруги синхронного генератора
Номер патенту: 38469
Опубліковано: 15.05.2001
Автори: Зонтов Роман Миколайович, Шоцький Олександр Миколайович, Алаєв Віктор Васильович
МПК: H03L 5/00
Мітки: регулювання, спосіб, синхронного, напруги, генератора
Текст:
...при значному зменшенні напруга СГ від номінального значення напруга живлення постійно підключена до обмотки збудження, струм збудження зростає, напруга СГ відновлюється. Навпаки, при значному збільшенні напруги СГ від номінального значення напруга живлення відключена від обмотки збудження, струм збудження зменшується, напруга СТ відновлюється. Реальними параметрами способу є: 1. Кількість тактів випрямлення напруги СГ і, отже, частота подачі...
Електромеханічний регулятор напруги системи збудження синхронного генератора
Номер патенту: 80717
Опубліковано: 25.10.2007
Автори: Макаревич Світлана Сергіївна, Каплун Віктор Володимирович, Козирський Володимир Вікторович
МПК: H02K 19/16
Мітки: генератора, напруги, електромеханічний, системі, синхронного, збудження, регулятор
Формула / Реферат:
Електромеханічний регулятор напруги системи збудження синхронного генератора, що містить стальну пружину, рухомий якір, вугільний стовп, трансформатор струму системи збудження генератора, який відрізняється тим, що додатково містить пружину зі сплаву з ефектом пам'яті форми, механічно послідовно з'єднану зі стальною пружиною та електрично з'єднану із вторинною обмоткою трансформатора струму системи збудження генератора.
Спосіб регулювання напруги синхронного генератора з високочастотним збудником
Номер патенту: 65910
Опубліковано: 15.04.2004
Автори: Шайтор Микола Михайлович, Березовенко Олександр Валентинович
МПК: H03L 5/00
Мітки: синхронного, регулювання, напруги, збудником, високочастотним, генератора, спосіб
Формула / Реферат:
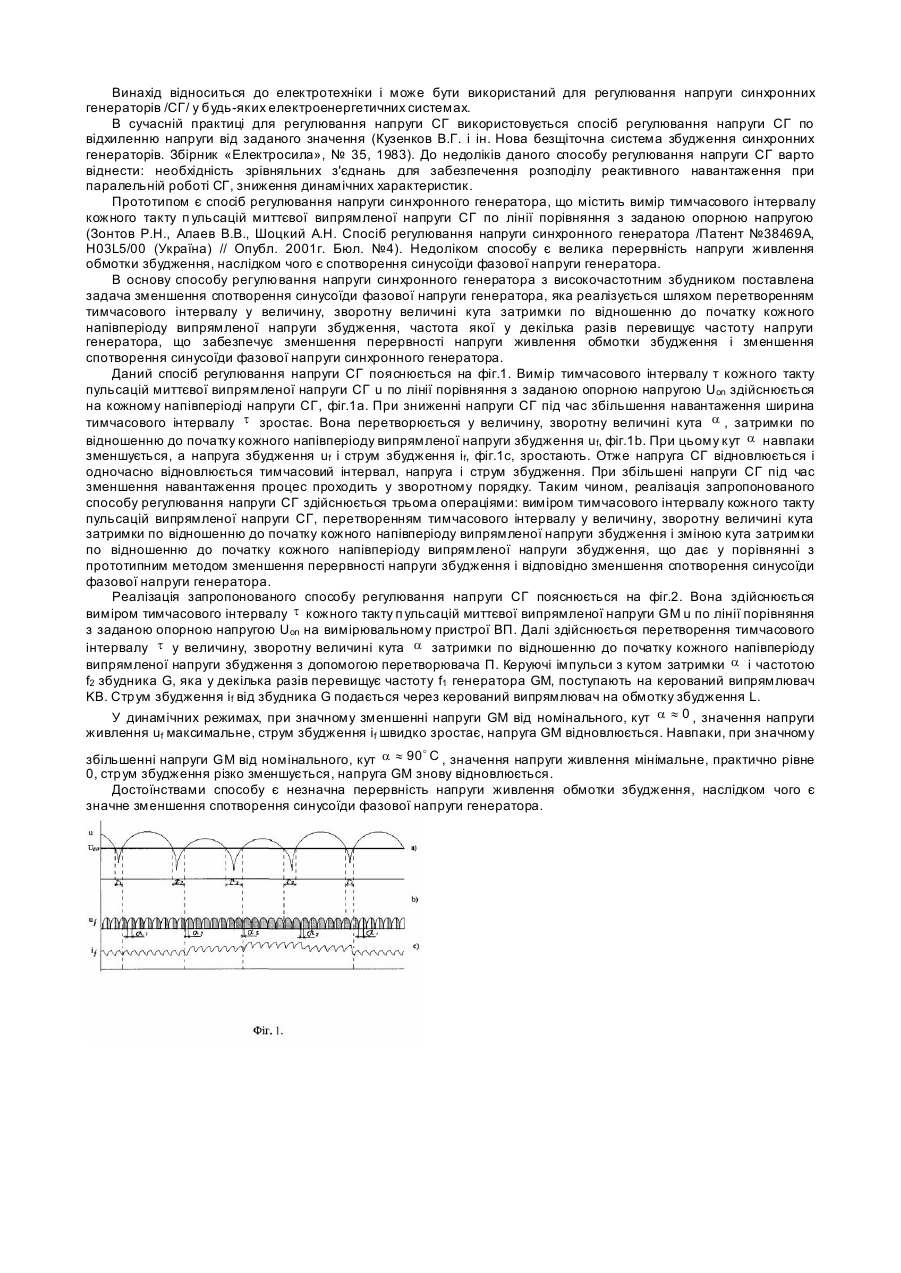
Спосіб регулювання напруги синхронного генератора з високочастотним збудником, що включає вимір часового інтервалу кожного такту пульсацій миттєвої випрямленої напруги синхронного генератора по лінії порівняння з заданою опорною напругою, який відрізняється тим, що перетворюють часовий інтервал у величину, зворотну величині кута затримки по відношенню до початку кожного напівперіоду випрямленої напруги збудження, частота якої у декілька разів...
Пристрій для збудження скомпенсованого синхронного генератора
Номер патенту: 18439
Опубліковано: 15.11.2006
Автори: Новогрецький Сергій Миколайович, Подимако Валерій Іванович
МПК: H02P 9/10
Мітки: збудження, генератора, пристрій, синхронного, скомпенсованого
Формула / Реферат:
Пристрій для збудження скомпенсованого синхронного генератора, що містить датчик положення ротора, трансформатор струму та фільтри нижніх частот, який відрізняється тим, що додатково приєднано блок формування напруги керування в подовжній осі, з'єднаний входом з датчиком відхилення напруги якоря та датчиком реактивного струму якоря, а виходом - через підсилювач потужності з подовжньою обмоткою збудження, додатково приєднано блок формування...
Попередній патент: Композиційний препарат для патогенетичної терапії собак з нирковою недостатністю
Наступний патент: Епоксидна композиція
Випадковий патент: Двотактний симетричний підсилювач струму