Спосіб керування електроприводом штангової глибинонасосної установки
Номер патенту: 89737
Опубліковано: 25.02.2010
Автори: Мартинчук Анастасія Данилівна, Молнар Василь Васильович, Калужний Богдан Семенович, Маляр Андрій Васильович


Формула / Реферат
Спосіб керування електроприводом штангової глибинонасосної установки, згідно з яким будують розгорнуту динамограму верстата-гойдалки як залежність зусилля в полірованому штоці від часу, визначають коефіцієнт заповнення циліндра глибинного насоса за різницею площ фігур, окреслених динамограмою, та відповідно до значення коефіцієнта змінюють швидкість обертання привідного двигуна верстата-гойдалки, який відрізняється тим, що розгорнуту динамограму верстата-гойдалки, з якої визначають коефіцієнт заповнення глибинного насоса, будують за знятими реєстрограмами струму привідного двигуна та положення кривошипа верстата-гойдалки, причому фіксують крайнє нижнє положення полірованого штока і значення струму двигуна верстата-гойдалки в цьому положенні, реєструють зміну струму двигуна верстата-гойдалки при ході полірованого штока вверх, фіксують це положення та значення струму двигуна в ньому, реєструють зміну струму двигуна верстата-гойдалки при ході полірованого штока вниз до крайнього нижнього положення.
Текст
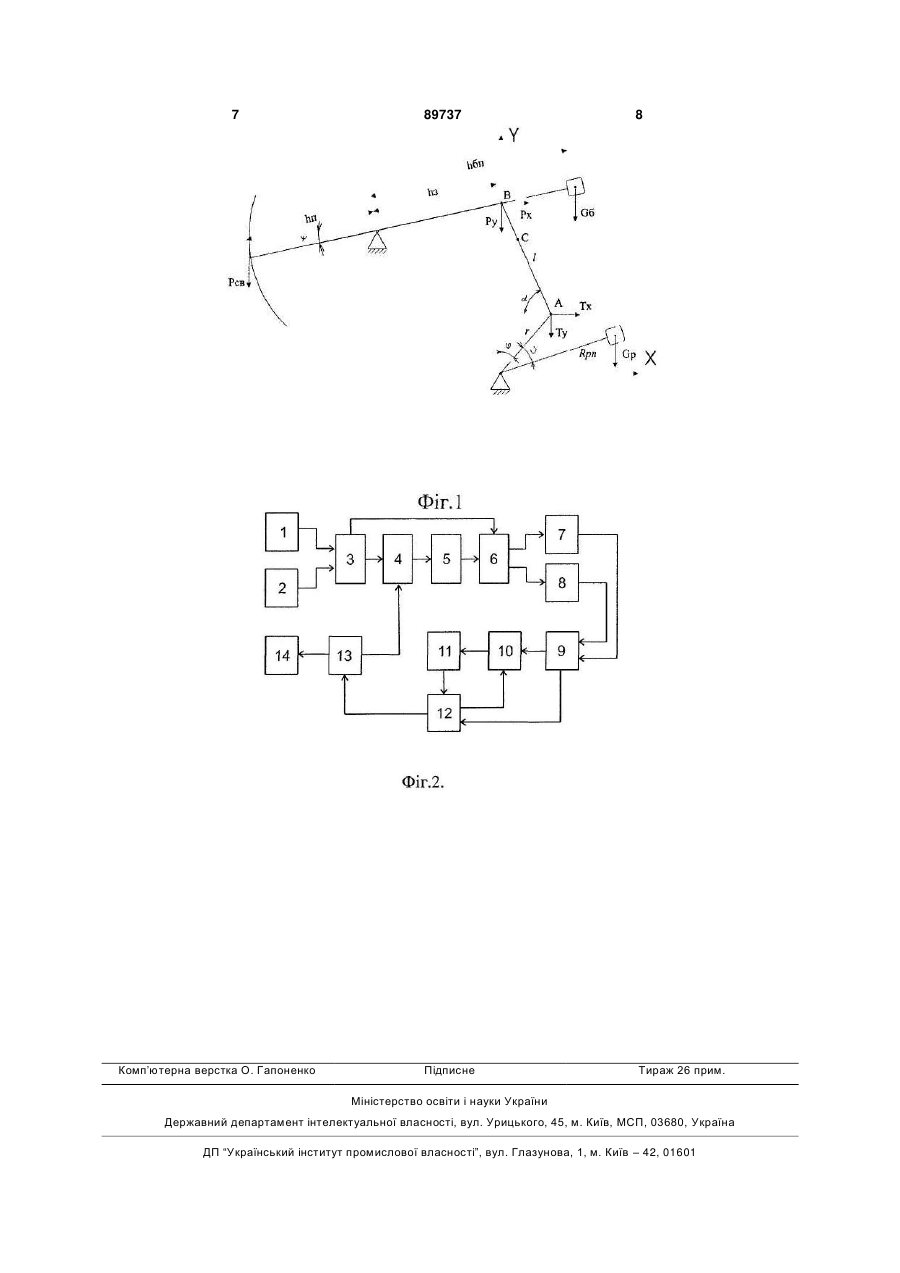
Спосіб керування електроприводом штангової глибинонасосної установки, згідно з яким будують розгорнуту динамограму верстата-гойдалки як залежність зусилля в полірованому штоці від часу, визначають коефіцієнт заповнення циліндра гли 3 89737 4 насоса потрібно задіяти мінімальну кількість давапаратор; 13 - перетворювач частоти; 14 - привідчів первинної інформації не знижуючи при цьому ний двигун. достовірність визначення інтенсивності притоку Спосіб реалізують так. При русі полірованого рідини із пласта у свердловину. штока вверх за сигналом давача нижнього полоПоставлене завдання вирішується таким чиження 2 записують значення струму двигуна у заном, що способі керування електроприводом штапам'ятовуючий пристрій 4, яке вимірюється перетнгової глибинонасосної установки будують розгорворювачем частоти 13. У функціональному нуту динамограму верстата-гойдалки як перетворювачі 5 знаходять відповідні значення залежність зусилля в полірованому штоці від часу, зусилля в полірованому штоці та за допомогою визначають коефіцієнт заповнення циліндра глилічильника 6 розраховують площу динамограми за бинного насоса за різницею площ фігур, окреслеперший півцикл руху полірованого штока. Знайдених динамограмою, та відповідно до значення коне число записують у пам'ять 7. При русі поліроефіцієнта змінюють швидкість обертання ваного штока вниз за сигналом давача верхнього привідного двигуна верстата-гойдалки, згідно виположення 1 записують значення струму двигуна у находу, розгорнуту динамограму верстатазапам'ятовуючий пристрій 4. У функціональному гойдалки, з якої визначають коефіцієнт заповнення перетворювачі 5 знаходять відповідні значення глибинного насоса, будують за знятими реєстрогзусилля в полірованому штоці та за допомогою рамами струму привідного двигуна та положення лічильника 6 розраховують площу динамограми за кривошипа верстата-гойдалки, при чому фіксують другий півцикл руху полірованого штока. Знайдене крайнє нижнє положення полірованого штока і число записують у пам'ять 8. За допомогою сумазначення струму двигуна верстата-гойдалки в тора 9 знаходить різницю площ розгорнутої динацьому положенні, реєструють зміну струму двигуна мограми, яка пропорційна значенню коефіцієнта верстата-гойдалки при ході полірованого штока заповнення глибинного насоса і, в залежності від вверх, фіксують це положення та значення струму значення цього коефіцієнта змінюють швидкість двигуна в ньому, реєструють зміну струму двигуна обертання привідного двигуна верстата-гойдалки. верстата-гойдалки при ході полірованого штока Якщо значення коефіцієнта заповнення у поріввниз до крайнього нижнього положення. нянні з числом, яке записане у реєстр 11, не зміСуттєвою ознакою запропонованого способу нилося, то швидкість двигуна залишається незмінкерування електроприводом штангової глибинонаною. У випадку, коли треба змінити уставку сосної установки є те, що у ньому для визначення коефіцієнта заповнення, за сигналом від тригера коефіцієнта заповнення насоса, у функції якого 10, поточне значення коефіцієнта заповнення зазмінюється швидкість обертання привідного двиписують з суматора 9 у реєстр 11. гуна, вимірюють значення струму двигуна, що усуСпосіб керування електроприводом штангової ває похибку вимірювання зусилля в полірованому глибинонасосної установки у функції коефіцієнта штоці і значно впливає на підвищення точності заповнення насоса передбачає визначення цього керування електроприводом штангової глибинонакоефіцієнта з динамограми Ρ=f(S) (функціональної сосної установки. залежності зусилля Ρ у полірованому штоці від На Фіг.1 зображена кінематична схема верстайого переміщення S). Вимірювання переміщення S та-гойдалки, а на Фіг.2 -блок-схема пристрою, за реалізують за допомогою давачів верхнього 1 та допомогою якого можна реалізувати запропонованижнього 2 положення кривошипа. Для визначенний спосіб, де Рх, Ру - проекції зусилля в точці В на ня зусилля Р, яке діє на полірований шток викориосі координат; Тх, Ту - проекції зусилля в точці А на стовують відомі функціональні залежності, які ісосі координат; Gb - вага балансирної противаги; Gp нують між параметрами кінематичної схеми - вага роторної противаги; Рсв - зусилля в поліроверстата-гойдалки й електроприводом штангової ваному штоці; 1 - давач крайнього верхнього поглибинонасосної установки. ложення кривошипа; 2 - давач крайнього нижнього З наведеної кінематичної схеми отримують положення кривошипа; 3 - перший тригер; 4 - зазалежність зусилля в полірованому штоці Ρ від пам'ятовуючий пристрій; 5 - функціональний перемоменту двигуна, приведеного до вала кривошитворювач; 6 - лічильник; 7, 8 - комірки пам'яті; 9 па. суматор; 10 - другий тригер; 11 - реєстр; 12 - ком P dV y dV x 1 mшh з sin hп dt М' д r cos Fіш / у А r cos h з cos G б h бп cos sin уВ ctg ctg Jб g cos dt h з sin Jбп GpR рп sin r sin (1) Fіш уА уВ d б dt де М'д - момент навантаження на валу кривошипа; Jб, Jбп, Jш - моменти інерції балансира, балансирної противаги, шатуна; xA, хВ, уА, yB - проекції відрізків АС і ВС на відповідні осі коор 5 89737 6 Момент двигуна, приведений до вала криводинат; б - кутова швидкість коливання балансишипа, буде рівний ра верстата, Vx, Vy - проекції швидкості переміщення центра ваги шатуна (точка С на Фіг.1) на М’д=Мс·kр, осі координат, які визначаються з геометричних розмірів окремих частин верстата-качалки на де kр - передавальне число редуктора та основі відомих законів механіки; ш - швидкість клинопасової передачі; обертання шатуна відносно центра ваги; Мc - електромагнітний момент привідного асинхронного двигуна 14. dV y d ш dV x Для знаходження електромагнітного моменту Fіш Jш mш xB yB dt dt dt привідного асинхронного двигуна 14 використовують рівняння електромагнітної рівноваги контурів струмів статора і короткозамкненого ротора АД в обертових осях х, у, які наведені нижче d 1x 0 1y dt d 2x dt s 0 2y R1i1x u1x d 1y 0 dt ; d 2y s 0 ; dt Me=1,5p(ψ1xi1y-ψ1yi1x) , R2i2x де 1x, 1y, 2χ, 2y, і1х, і1у, i2x, i2y - потокозчеплення та струми перетворених контурів статора і ротора; R1, R2 - активні опори цих контурів; 0 частота напруги живлення; s - ковзання ротора. Вхідною величиною цих рівнянь є напруга живлення та струм статора привідного двигуна. Спосіб реалізують за допомогою пристрою (Фіг.2), який працює таким чином. На початку ходу полірованого штока вгору за сигналом давача нижнього положення 2 тригер 3 дає дозвіл на запис значень струму двигуна від перетворювача частоти 13 в запам'ятовуючий пристрій 4 та перемикання виходу лічильника на комірку пам'яті 1. У функціональному перетворювачі 5 масив значень струму двигуна перетворюється в значення зусилля на полірованому штоці. Далі у лічильнику 6 рахується площа розгорнутої в часі частини динамограми від крайнього нижнього положення до крайнього верхнього положення кривошипа й отримане число записується в комірку пам'яті 1. При проходженні кривошипом свого крайнього верхнього положення спрацьовує да 0 1x 2x R1i1y R 2i 2 y u1y ; 0 ; вач верхнього положення 1, тригер 3 дає дозвіл на запис значень струму двигуна від перетворювача частоти 13 в запам'ятовуючий пристрій 4 та перемикає вихід лічильника на комірку пам'яті 2. Далі процедура розрахунку площі частини динамограми від крайнього верхнього положення до крайнього нижнього положення кривошипа повторюється аналогічно до попередньої. В суматорі 9 обчислюється різниця площ першого і другого півциклів динамограми. Отримане число порівнюється компаратором 12 з уставкою, введеною в реєстр 11. Якщо воно не рівне уставці, то компаратор, в залежності від знаку, дає сигнал в перетворювач частоти 13 на відповідну зміну частоти обертання привідного двигуна 14 та сигнал дозволу в тригер 10 на запис нового значення уставки в реєстр 11. Якщо після зміни частоти обертання двигуна не наступить рівновага між продуктивністю насоса і притоком рідини у свердловину при динамічному рівні, то описаний процес повториться. 7 Комп’ютерна верстка О. Гапоненко 89737 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of electric drive of rod pumping installation
Автори англійськоюKaluzhnyi Bohdan Semenovych, Maliar Andrii Vasyliovych, Martynchuk Anastasia Danylivna, Molnar Vasyl Vasyliovych
Назва патенту російськоюСпособ управления электроприводом штанговой глубинно-насосной установки
Автори російськоюКалужный Богдан Семенович, Маляр Андрей Васильевич, Мартынчук Анастасия Даниловна, Молнар Василий Васильевич
МПК / Мітки
МПК: E21B 43/00
Мітки: електроприводом, установки, керування, штангової, глибинонасосної, спосіб
Код посилання
<a href="https://ua.patents.su/4-89737-sposib-keruvannya-elektroprivodom-shtangovo-glibinonasosno-ustanovki.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування електроприводом штангової глибинонасосної установки</a>
Спосіб одержання динамограми глибинонасосної установки
Номер патенту: 65664
Опубліковано: 15.04.2004
Автори: Бульбас Валерій Миколайович, Денис Богдан Дмитрович, Калужний Богдан Семенович
МПК: E21B 47/00
Мітки: одержання, динамограми, глибинонасосної, спосіб, установки
Формула / Реферат:
Спосіб одержання динамограми глибинонасосної установки, що включає формування масиву значень зусилля в полірованому штоці і його положення, який відрізняється тим, що положення полірованого штока визначають як функцію часу, для чого фіксують крайнє нижнє положення полірованого штока, значення зусилля в ньому та момент часу в цьому положенні, реєструють зміну зусилля в полірованому штоці як функцію часу при ході його вгору, розраховують...
Спосіб керування електроприводом штангової глибинної помпи та пристрій для його реалізації
Номер патенту: 60393
Опубліковано: 15.10.2003
Автори: Бульбас Валерій Миколайович, Денис Богдан Дмитрович, Білик Володимир Федотович, Калужний Богдан Семенович, Мартинчук Анастасія Данилівна
МПК: E21B 43/00
Мітки: спосіб, штангової, реалізації, пристрій, керування, помпи, глибинної, електроприводом
Формула / Реферат:
1. Спосіб керування електроприводом штангової глибинної помпи, що базується на визначенні коефіцієнта заповнення циліндра глибинної помпи за різницею площ фігур, окреслених динамограмою верстата-гойдалки, який відрізняється тим, що відповідно до значення коефіцієнта заповнення циліндра глибинної помпи змінюється швидкість обертання двигуна верстата-гойдалки, а мірою коефіцієнта заповнення є різниця площ фігур, сформованих з розгорнутої...
Передавальний механізм для приводу свердловинної штангової насосної установки
Номер патенту: 43169
Опубліковано: 15.11.2001
Автори: Чернявський Анатолій Миколайович, Шахов Олександр Миколайович, Панченко Вадим Олексійович
МПК: F04B 49/02
Мітки: установки, приводу, передавальний, насосної, механізм, свердловинної, штангової
Формула / Реферат:
Передавальний механізм для приводу свердловинної штангової насосної установки, що складений з механізму перетворення обертового руху в зворотно-поступальний і механізму зміни кутової швидкості, який відрізняється тим, що між кривошипом механізму перетворення обертового руху в зворотно-поступальний і редуктором механізму зміни кутової швидкості створена обертова пара, шляхом насадження диска зубчастого, зафіксованого штифтом запобіжним, на...
Спосіб цифрового керування електроприводом постійного струму головних електроприводів прокатних станів
Номер патенту: 32089
Опубліковано: 12.05.2008
Автори: Файнштейн Вілен Григорович, Цвітнов Віталій Олександрович
МПК: H02P 5/00
Мітки: цифрового, прокатних, електроприводом, головних, спосіб, постійного, станів, електроприводів, струму, керування
Формула / Реферат:
Спосіб цифрового керування електроприводом постійного струму головних електроприводів прокатних станів, що містить обчислювальний пристрій, що забезпечує регулювання струму й швидкості обертання якоря двигуна шляхом обчислення затримки включення чергового тиристора відносно початку наступного інтервалу перетворення, цифровий пристрій керування уведенням (виводом) інформації в (з) обчислювального пристрою, який відрізняється тим, що визначення...
Пустотіла штанга штангової глибинної насосної установки

Номер патенту: 9471
Опубліковано: 15.09.2005
Автори: Луньов Борис Юрійович, Доля Юрій Іванович, Санжаровська Ганна Юріївна, Доля Анатолій Юрійович
МПК: F04B 47/00
Мітки: установки, штангової, штанга, насосної, пустотіла, глибинної
Формула / Реферат:
Пустотіла штанга штангової глибинної насосної установки, що містить трубчастий корпус і головки, встановлені на кінцях трубчастого корпусу, яка відрізняється тим, що кожна головка виконана суцільною і герметично закріплена на відповідному кінці трубчастого корпусу.
Попередній патент: Спосіб розкиснення сталі в ковші
Наступний патент: Спосіб селективної ізоляції водонасичених прошарків в тонкошаруватих піщаноглинистих газоводоносних товщах
Випадковий патент: Спосіб підвищення продуктивності шовковичного шовкопряда