Система фазового автопідстроювання із диференційним зв’язком
Номер патенту: 89872
Опубліковано: 10.03.2010
Автори: Булгач Віктор Леонардович, Стась Вадим Володимирович, Бурсова Тетяна Вікторівна, Зайцев Григорій Фролович

Формула / Реферат
Система фазового автопідстроювання з диференційним зв'язком для узгодження фаз двох змінних напруг однієї частоти, де перша напруга через перший вхід системи надходить на перший вхід фазового дискримінатора та на перший вихід системи, друга напруга через другий вхід системи надходить на перший вхід фазообертача, другий вхід якого з'єднаний з виходом інтегратора, а вихід з'єднаний із другим виходом системи та через елемент зсуву фази на ![]() з'єднаний із другим входом фазового дискримінатора, вихід якого з'єднаний з входом фільтра, вихід якого з'єднаний із входом підсилювача, яка відрізняється тим, що додатково введений диференційний зв'язок, який складається з динамічних ланок - блока математичних моделей фазового дискримінатора з фільтром, фазообертача, коригувального елемента і двох суматорів, причому перший вхід другого суматора з'єднаний з виходом фільтра, другий його вхід через послідовно з'єднані блок математичних моделей фазового дискримінатора з фільтром, фазообертача з'єднаний з виходом інтегратора, вихід другого суматора через коригувальний елемент з'єднаний з першим входом першого суматора, другий вхід якого з'єднаний з виходом підсилювача, а вихід першого суматора з'єднаний із входом інтегратора.
з'єднаний із другим входом фазового дискримінатора, вихід якого з'єднаний з входом фільтра, вихід якого з'єднаний із входом підсилювача, яка відрізняється тим, що додатково введений диференційний зв'язок, який складається з динамічних ланок - блока математичних моделей фазового дискримінатора з фільтром, фазообертача, коригувального елемента і двох суматорів, причому перший вхід другого суматора з'єднаний з виходом фільтра, другий його вхід через послідовно з'єднані блок математичних моделей фазового дискримінатора з фільтром, фазообертача з'єднаний з виходом інтегратора, вихід другого суматора через коригувальний елемент з'єднаний з першим входом першого суматора, другий вхід якого з'єднаний з виходом підсилювача, а вихід першого суматора з'єднаний із входом інтегратора.
Текст
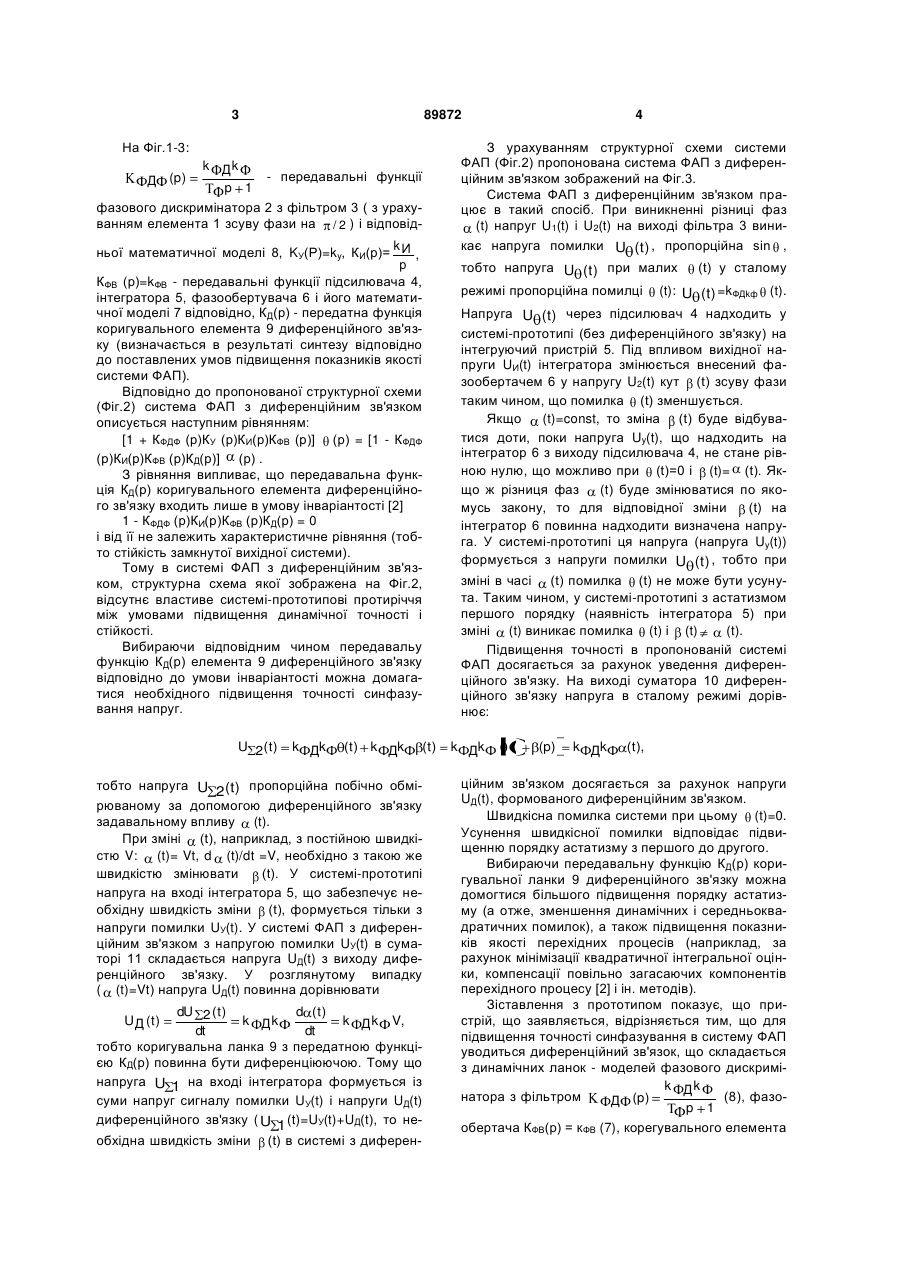
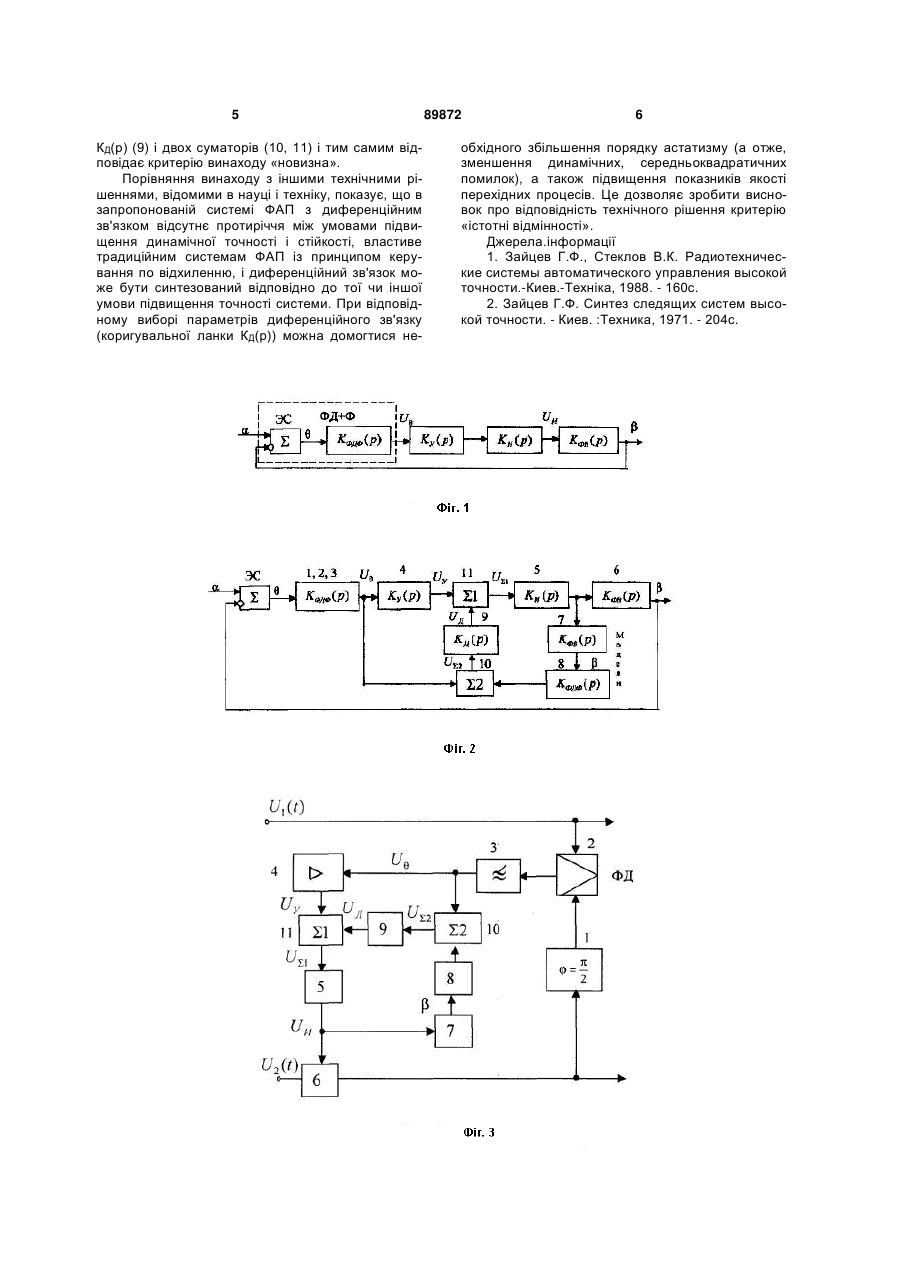
Система фазового автопідстроювання з диференційним зв'язком для узгодження фаз двох змінних напруг однієї частоти, де перша напруга через перший вхід системи надходить на перший вхід фазового дискримінатора та на перший вихід системи, друга напруга через другий вхід системи надходить на перший вхід фазообертача, другий C2 2 (19) 1 3 89872 На Фіг.1-3: k Дk - передавальні функції Д (p ) p 1 фазового дискримінатора 2 з фільтром 3 ( з урахуванням елемента 1 зсуву фази на / 2 ) і відповід k ньої математичної моделі 8, KУ(Р)=ky, КИ(р)= И , р КФВ (р)=kФВ - передавальні функції підсилювача 4, інтегратора 5, фазообертувача 6 і його математичної моделі 7 відповідно, КД(р) - передатна функція коригувального елемента 9 диференційного зв'язку (визначається в результаті синтезу відповідно до поставлених умов підвищення показників якості системи ФАП). Відповідно до пропонованої структурної схеми (Фіг.2) система ФАП з диференційним зв'язком описується наступним рівнянням: [1 + КФДФ (р)КУ (р)КИ(р)КФВ (р)] (р) = [1 - КФДФ (р)КИ(р)КФВ (р)КД(р)] (р) . З рівняння випливає, що передавальна функція КД(р) коригувального елемента диференційного зв'язку входить лише в умову інваріантості [2] 1 - КФДФ (р)КИ(р)КФВ (р)КД(р) = 0 і від її не залежить характеристичне рівняння (тобто стійкість замкнутої вихідної системи). Тому в системі ФАП з диференційним зв'язком, структурна схема якої зображена на Фіг.2, відсутнє властиве системі-прототипові протиріччя між умовами підвищення динамічної точності і стійкості. Вибираючи відповідним чином передавальу функцію КД(р) елемента 9 диференційного зв'язку відповідно до умови інваріантості можна домагатися необхідного підвищення точності синфазування напруг. U 2(t) k Дk ( t ) k Дk (t) тобто напруга U 2 (t) пропорційна побічно обмірюваному за допомогою диференційного зв'язку задавальному впливу (t). При зміні (t), наприклад, з постійною швидкістю V: (t)= Vt, d (t)/dt =V, необхідно з такою же швидкістю змінювати (t). У системі-прототипі напруга на вході інтегратора 5, що забезпечує необхідну швидкість зміни (t), формується тільки з напруги помилки UУ(t). У системі ФАП з диференційним зв'язком з напругою помилки UУ(t) в суматорі 11 складається напруга UД(t) з виходу диференційного зв'язку. У розглянутому випадку ( (t)=Vt) напруга UД(t) повинна дорівнювати dU 2 ( t ) d (t) k Дk k Д k V, dt dt тобто коригувальна ланка 9 з передатною функцією КД(р) повинна бути диференціюючою. Тому що напруга U 1 на вході інтегратора формується із суми напруг сигналу помилки UУ(t) і напруги UД(t) диференційного зв'язку ( U 1 (t)=UУ(t)+UД(t), то неU Д (t) обхідна швидкість зміни (t) в системі з диферен 4 З урахуванням структурної схеми системи ФАП (Фіг.2) пропонована система ФАП з диференційним зв'язком зображений на Фіг.3. Система ФАП з диференційним зв'язком працює в такий спосіб. При виникненні різниці фаз (t) напруг U1(t) i U2(t) на виході фільтра 3 виникає напруга помилки U (t ) , пропорційна sin , тобто напруга U (t ) при малих (t) у сталому режимі пропорційна помилці (t): U (t ) =kФДkф (t). Напруга U (t ) через підсилювач 4 надходить у системі-прототипі (без диференційного зв'язку) на інтегруючий пристрій 5. Під впливом вихідної напруги UИ(t) інтегратора змінюється внесений фазообертачем 6 у напругу U2(t) кут (t) зсуву фази таким чином, що помилка (t) зменшується. Якщо (t)=const, то зміна (t) буде відбуватися доти, поки напруга Uy(t), що надходить на інтегратор 6 з виходу підсилювача 4, не стане рівною нулю, що можливо при (t)=0 і (t)= (t). Якщо ж різниця фаз (t) буде змінюватися по якомусь закону, то для відповідної зміни (t) на інтегратор 6 повинна надходити визначена напруга. У системі-прототипі ця напруга (напруга Uy(t)) формується з напруги помилки U (t ) , тобто при зміні в часі (t) помилка (t) не може бути усунута. Таким чином, у системі-прототипі з астатизмом першого порядку (наявність інтегратора 5) при зміні (t) виникає помилка (t) і (t) (t). Підвищення точності в пропонованій системі ФАП досягається за рахунок уведення диференційного зв'язку. На виході суматора 10 диференційного зв'язку напруга в сталому режимі дорівнює: k Дk t (p) k Дk ( t ), ційним зв'язком досягається за рахунок напруги UД(t), формованого диференційним зв'язком. Швидкісна помилка системи при цьому (t)=0. Усунення швидкісної помилки відповідає підвищенню порядку астатизму з першого до другого. Вибираючи передавальну функцію КД(р) коригувальної ланки 9 диференційного зв'язку можна домогтися більшого підвищення порядку астатизму (а отже, зменшення динамічних і середньоквадратичних помилок), а також підвищення показників якості перехідних процесів (наприклад, за рахунок мінімізації квадратичної інтегральної оцінки, компенсації повільно загасаючих компонентів перехідного процесу [2] і ін. методів). Зіставлення з прототипом показує, що пристрій, що заявляється, відрізняється тим, що для підвищення точності синфазування в систему ФАП уводиться диференційний зв'язок, що складається з динамічних ланок - моделей фазового дискриміk Дk натора з фільтром (8), фазоД (p ) p 1 обертача КФВ(р) = кФВ (7), корегувального елемента 5 КД(р) (9) і двох суматорів (10, 11) і тим самим відповідає критерію винаходу «новизна». Порівняння винаходу з іншими технічними рішеннями, відомими в науці і техніку, показує, що в запропонованій системі ФАП з диференційним зв'язком відсутнє протиріччя між умовами підвищення динамічної точності і стійкості, властиве традиційним системам ФАП із принципом керування по відхиленню, і диференційний зв'язок може бути синтезований відповідно до тої чи іншої умови підвищення точності системи. При відповідному виборі параметрів диференційного зв'язку (коригувальної ланки КД(р)) можна домогтися не 89872 6 обхідного збільшення порядку астатизму (а отже, зменшення динамічних, середньоквадратичних помилок), а також підвищення показників якості перехідних процесів. Це дозволяє зробити висновок про відповідність технічного рішення критерію «істотні відмінності». Джерела.інформації 1. Зайцев Г.Ф., Стеклов В.К. Радиотехнические системы автоматического управления высокой точности.-Киев.-Техніка, 1988. - 160с. 2. Зайцев Г.Ф. Синтез следящих систем высокой точности. - Киев. :Техника, 1971. - 204с. 7 Комп’ютерна верстка А. Крижанівський 89872 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of phase locked loop connection with a differential connection
Автори англійськоюZaitsev Hryhorii Frolovych, Bulhach Viktor Leonardovych, Stas Vadym Volodymyrovych, Bursova Tetiana Viktorivna
Назва патенту російськоюСистема фазовой автоподстройки частоты с дифференциальной связью
Автори російськоюЗайцев Григорий Фролович, Булгач Виктор Леонардович, Стась Вадим Владимирович, Бурсова Татьтяна Викторовна
МПК / Мітки
Мітки: система, фазового, автопідстроювання, диференційним, зв'язком
Код посилання
<a href="https://ua.patents.su/4-89872-sistema-fazovogo-avtopidstroyuvannya-iz-diferencijjnim-zvyazkom.html" target="_blank" rel="follow" title="База патентів України">Система фазового автопідстроювання із диференційним зв’язком</a>
Гідроважільна слідкуюча система з диференційним редуктором
Номер патенту: 23624
Опубліковано: 11.06.2007
Автори: Корчак Олена Сергіївна, Шинкаренко Олег Михайлович, Левандовський Володимир Феліксович
МПК: B30B 15/16
Мітки: слідкуюча, система, диференційним, гідроважільна, редуктором
Формула / Реферат:
Гідроважільна слідкуюча система з диференційним редуктором, що містить пульт з рукояткою керування, виконавчий механізм, маслостанцію, гідроважільний сервопривід, що включає двоклапанний розподільник з системою підсилення і сервомотор, важелі, тяги, коромисло, підсумовуючий елемент, розподільний вал преса, яка відрізняється тим, що підсилюючим елементом є слідкуючий здвоєний гідропідсилювач, а підсумовуючим - зв’язаний з ним через коромисло...
Система керування резонансним інвертором
Номер патенту: 46316
Опубліковано: 10.12.2009
Автори: Кобець Данило Васильович, Середа Сергій Миколайович, Ушаков Володимир Іванович
МПК: H02M 7/539
Мітки: інвертором, резонансним, система, керування
Формула / Реферат:
Система керування резонансним інвертором, що включає блок неузгодження, на перший вхід якого надходить вхідний струм резонансного інвертора, а другий вхід підключений до виходу датчика поточного струму навантаження, а також блок формування імпульсів керування ключами, вихід якого підключений до резонансного інвертора, яка відрізняється тим, що містить блок нечіткої логіки, до одного входу якого підключений вихід блока неузгодження, а до...
Спосіб визначення температурної залежності параметра порядку фазового переходу у твердих тілах
Номер патенту: 13684
Опубліковано: 17.04.2006
Автор: Студеняк Ігор Петрович
МПК: G01N 25/02, G01N 3/40
Мітки: залежності, параметра, тілах, спосіб, порядку, визначення, твердих, переходу, фазового, температурної
Формула / Реферат:
Спосіб визначення температурної залежності параметра порядку фазового переходу у твердих тілах, який включає визначення параметра порядку шляхом температурних ізоабсорбційних досліджень краю оптичного поглинання, який відрізняється тим, що із експериментально отриманої температурної залежності ширини оптичної псевдощілини
Спосіб вимірювання фазового зсуву
Номер патенту: 48641
Опубліковано: 15.08.2002
Автор: Огороднійчук Леонід Дмитрович
МПК: G01R 25/00, G01R 27/28
Мітки: зсуву, спосіб, вимірювання, фазового
Формула / Реферат:
Спосіб вимірювання фазового зсуву, у відповідності з яким генерують першу і другу напруги неоднакових і некратних частот, їх розгалужують відповідно на третю і четверту, п'яту і шосту напруги, перший і другий порівнювальні сигнали, частоту яких вибирають в одному з високочастотних діапазонів, модулюють відповідно третьою і шостою напругами, формують складений сигнал, здійснюють перетворення частот і виділяють вимірювальну напругу, формують...
Пристрій фазового виявлення цілей
Номер патенту: 31013
Опубліковано: 25.03.2008
Автори: Лазутський Анатолій Федорович, Челпанов Володимир Валентинович, Шматков Сергій Ігорович
МПК: G01S 13/52
Мітки: цілей, фазового, виявлення, пристрій
Формула / Реферат:
Пристрій фазового виявлення цілей, що містить послідовно з'єднані блок попередньої обробки, блок фазовимірювача, блок обчислювання розкиду фаз та пороговий блок, який відрізняється тим, що додатково введені блок віднімання, послідовно з'єднані блок вимірювання дальності і блок формування імпульсів запуску та вузол цифрового корелятора у складі послідовно з'єднаних блока пам'яті, блока корелятора та блока аналізу, при цьому вхід блока...
Попередній патент: Спосіб та лінія чистової прокатки для гарячої прокатки вихідного матеріалу
Наступний патент: Пристрій для очищування коренебульбоплодів
Випадковий патент: Спосіб утилізації холоду зрідженого природного газу при його регазифікації з виробленням електроенергії